水下无人航行器组合导航研究
- 格式:doc
- 大小:2.31 MB
- 文档页数:63
新型水下机器人定位与导航算法研究随着技术的不断进步,水下机器人在海洋资源勘探、海洋科学研究以及海洋工程等领域发挥着重要作用。
而水下机器人的定位与导航算法是其能否准确执行任务的重要关键。
本文将探讨新型水下机器人定位与导航算法的研究进展,并分析其应用前景。
一、定位与导航算法的重要性水下机器人作为一种自主操作的智能系统,需要具备准确的定位能力以及稳定的导航算法。
由于水下环境的复杂性,传统的定位与导航方法无法完全满足水下机器人的需求。
因此,研究新型的定位与导航算法对于提高水下机器人的精确性和可靠性至关重要。
二、惯性导航与基于声纳的定位研究惯性导航是水下机器人定位与导航中常用的方法之一。
该方法通过使用加速度计和陀螺仪等惯性传感器,利用航位推算的方法对机器人的位置和方向进行估计。
惯性导航具有实时性好、无需外部信号等优点,但由于惯性传感器存在漂移误差,导航精度随时间的增加而降低。
因此,在基于惯性导航的基础上结合声纳数据进行定位是提高定位精度的一种重要方法。
通过声纳传感器获取水下声纳信息,结合惯性导航算法进行数据融合估计,可以有效提高水下机器人的定位精度。
三、视觉导航与图像处理研究随着计算机视觉技术的快速发展,视觉导航成为水下机器人定位与导航研究的热点之一。
水下机器人可以使用摄像机获取水下图像信息,并通过图像处理算法对图像进行分析和处理,从而实现定位与导航。
视觉导航可以利用环境中的特征点进行位置估计,如通过SLAM (Simultaneous Localization and Mapping)算法构建水下环境的地图,并利用地图进行机器人的定位。
此外,还可以利用深度学习等先进的图像处理技术,通过对水下图像的学习和分析,提高机器人的感知和理解能力。
四、无线通信与水声通信技术研究水下机器人在执行任务时需要与外界进行实时通信,因此无线通信技术是定位与导航算法研究中的另一个重要方向。
传统的无线通信在水下非常困难,而水声通信技术可以在水下实现数据的传输和通信。
水下机器人自主导航技术研究自主导航技术一直是水下机器人领域探索的难点之一。
水下环境的复杂性和不确定性使得水下机器人在无人干预的情况下难以准确、高效地完成任务。
本文将从传感技术、建图技术和路径规划技术三个方面进行介绍和研究。
传感技术传感技术是水下机器人自主导航技术中最基础的技术。
传感器的选择与码率和灵敏度等技术参数密切相关。
目前常用的水下传感器有声纳、激光雷达、电磁信号传感器等。
用传感器实现水下机器人的环境感知和深度感知,提高机器人的感知能力是自主导航技术中尤为重要的一步。
另外,机器人还需要进行对自身姿态、运动状态进行感知和估计,如加速度计和陀螺仪等,以此确保机器人在水下环境中的精准执行。
建图技术水下机器人在自主导航过程中需要能够高效、准确地建立水下环境的三维地图。
传感器获取到的数据需要经过处理,转化成为三维点云或三维模型图。
目前建图技术有基于单目视觉的建图技术、基于激光雷达的建图技术等。
基于单目视觉的技术是通过视觉SLAM技术,引入多个视角对场景进行重建,定位和地图的同时进行。
基于激光雷达的技术是通过发射激光束,在探测过程中收集反射光并测量成为距离数据,施加滤波算法提取地图点云,最终通过缝合算法生成多态较为完整的地图。
建立三维地图后,机器人可以实现对当前位置的判断以及对可达区域的评估。
路径规划技术路径规划技术是水下机器人自主导航技术的核心。
这项技术主要作用是通过已知的起点、终点和地图信息,构建一条最优路径,引导机器人高效地执行任务。
路径规划技术包含了基于图搜索的A星算法和基于机器人动力学的光学测距法等多种方法。
其中基于A星算法的路径规划是最常见的算法之一,其工作原理类似于在地图中进行波的扩散,从而最终得出一条路径。
机器人路径跟踪算法通常有PID控制、扭矩控制、滤波器和逆运动学等方法。
其中PID控制已经广泛应用,在追踪路径和保持位置和运动方向等方面都具有较强优势。
未来发展水下机器人的自主导航技术还需要不断地进步和提高。
组合导航系统在水下潜器中的应用的开题报告 一、背景与意义 随着现代科技的不断进步,水下探测技术也越来越成熟,涉及到多个领域,例如海洋地质、海底资源勘探、油气管道维护等,因而水下潜器的应用也越来越广泛。作为水下潜器的核心设备之一,组合导航系统在水下潜器中起着至关重要的作用。组合导航系统可以综合多种传感器的信息,利用卡尔曼滤波算法得到水下潜器的三维姿态、位置等信息,为实现水下任务提供数据支撑。本文旨在通过对组合导航系统在水下潜器中的应用进行研究,为该领域的研究与应用提供科技支撑。
二、研究内容 1. 水下潜器的基本情况及其组成。 2. 组合导航系统的基本原理和组成。 3. 组合导航系统在水下潜器中的应用研究。 4. 水下潜器姿态控制的方法及其在组合导航系统中的应用。 5. 水下潜器定位方法及其在组合导航系统中的应用。 6. 组合导航系统的精度评估及改进方法。 三、预期研究结果 1. 对水下潜器姿态控制和定位方法进行分析,掌握相关基本知识。 2. 对组合导航系统的基本原理和组成进行深入研究,了解其在水下潜器中的应用。
3. 在对组合导航系统的应用进行研究的基础上,提出相应的改进措施,提高其精度和性能。
4. 为相关领域的研究和应用提供科技支撑和指导。 四、研究方法 本文采用文献研究与案例分析相结合的方法,对水下潜器的应用及其组成、组合导航系统的原理和应用进行综合分析,结合实际案例深入研究组合导航系统的应用和精度评估方法。
五、研究进度安排 1. 研究背景与意义。 2. 水下潜器的基本情况及其组成。 3. 组合导航系统的基本原理和组成。 4. 组合导航系统在水下潜器中的应用研究。 5. 水下潜器姿态控制的方法及其在组合导航系统中的应用。 6. 水下潜器定位方法及其在组合导航系统中的应用。 7. 组合导航系统的精度评估及改进方法。 8. 结论与展望。 六、参考文献 1. Zhang, W., Gao, H., Chen, L., & Cao, Y. (2019). Strapdown-solver-based data processing for a low-cost MEMS-based inertial measurement unit in underwater positioning. IEEE Transactions on Instrumentation and Measurement, 69(2), 315-323.
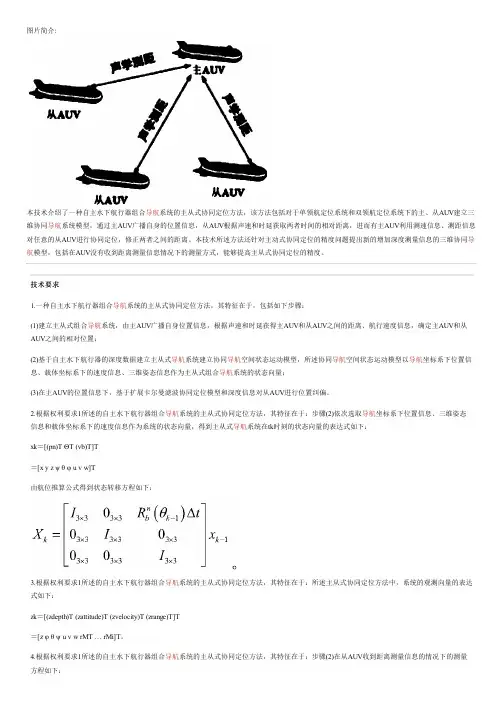
图片简介:本技术介绍了一种自主水下航行器组合导航系统的主从式协同定位方法,该方法包括对于单领航定位系统和双领航定位系统下的主、从AUV建立三维协同导航系统模型,通过主AUV广播自身的位置信息,从AUV根据声速和时延获取两者时间的相对距离,进而有主AUV利用测速信息、测距信息对任意的从AUV进行协同定位,修正两者之间的距离。
本技术所述方法还针对主动式协同定位的精度问题提出新的增加深度测量信息的三维协同导航模型,包括在AUV没有收到距离测量信息情况下的测量方式,能够提高主从式协同定位的精度。
技术要求1.一种自主水下航行器组合导航系统的主从式协同定位方法,其特征在于,包括如下步骤:(1)建立主从式组合导航系统,由主AUV广播自身位置信息,根据声速和时延获得主AUV和从AUV之间的距离、航行速度信息,确定主AUV和从AUV之间的相对位置;(2)基于自主水下航行器的深度数据建立主从式导航系统建立协同导航空间状态运动模型,所述协同导航空间状态运动模型以导航坐标系下位置信息、载体坐标系下的速度信息、三维姿态信息作为主从式组合导航系统的状态向量;(3)在主AUV的位置信息下,基于扩展卡尔曼滤波协同定位模型和深度信息对从AUV进行位置纠偏。
2.根据权利要求1所述的自主水下航行器组合导航系统的主从式协同定位方法,其特征在于:步骤(2)依次选取导航坐标系下位置信息、三维姿态信息和载体坐标系下的速度信息作为系统的状态向量,得到主从式导航系统在tk时刻的状态向量的表达式如下:xk=[(pn)T ΘT (vb)T]T=[x y z ψ θ φ u v w]T由航位推算公式得到状态转移方程如下:3.根据权利要求1所述的自主水下航行器组合导航系统的主从式协同定位方法,其特征在于:所述主从式协同定位方法中,系统的观测向量的表达式如下:zk=[(zdepth)T (zattitude)T (zvelocity)T (zrange)T]T=[z φ θ ψ u v w rMT … rMi]T。
混合驱动的水下无人航行器总体设计与性能研究混合驱动无人水下自主航行器是目前世界上一类新型的无人水下自主机器人,该类型航行器结合了水下滑翔机和水下自主航行器的优点。
可以采用水下滑翔模式运动,完成大航程、长时序的观测需求,也可切换为推进模式运动,完成对特定区域的探索任务。
针对中国海洋发展战略,国内需要多款不同类型的无人水下自主航行器来建立三维、立体化的海洋观测网络。
本文以国家预研基金项目为基础,针对我国海洋发展战略,开发了一款新型混合驱动的无人水下自主航行器。
该航行器外形采用仿生鳐鱼设计,具有大翼展的特征,既拥有飞翼式水下滑翔机高升阻比、稳定性高和搭载能力强的优点,也有普通水下滑翔机灵活性高和操纵性好的优点,是一类新型无人水下自主航行器。
不同于一般无人水下自主航行器在尾部装有推进器,该航行器还在水翼下方对称搭载有推进器,可大大提高在水中的操纵性与回转性,并可在水中完成水平推进运动、空间绕圆运动和空间螺旋运动,还可以突破目前国际海域内,普通水下机器人无法突破的中尺度漩涡。
本论文,在充分调研国内外水下机器人的研究概况情况下,采用模块化设计与CFD数值计算相结合的设计方法进行了该航行器的总体设计与内部各系统单元设计。
并在总体设计的基础上完成了该航行器的水动力特性分析和航行器与螺旋桨的耦合运动分析。
最后,经过两者的循环迭代完成了该航行器的设计目标并进行了相关设备的选型,为控制系统的搭建和真机的组装提供了研究基础,进而验证本文设计方法的正确性和CFD数值计算方法的有效性。
本文主要研究成果和创新点为:本文创新性的提出了一种新型的混合驱动无人水下自主航行器的设计方法,并设计出了一种新型混合驱动无人水下自主航行器。
该航行器最大工作深度水下1000m,最大推进航速1.5kn,最大续航力300km。
采用模块化设计、三维实体建模和CFD数值模拟相结合的设计方法,完成了航行器的外形设计、耐压壳体设计、浮力调节系统设计、姿态调节系统设计、控制系统、推进系统和抛载系统的设计。
科技前沿▏自主水下航行器导航技术发展现状与分析近年来,随着微电子、人工智能和新兴量子导航等技术的快速发展,极大地推动了海洋技术前沿领域相关技术的进步,无人水下航行器技术已经成为各海洋强国争先发展的重点领域。
2017年,美国国防高级探究计划局称计划开发深海定位导航系统,该系统能够为各种载有该移动工作端的水下目标提供实时、连续、稳点以及精确的导航信息。
自主水下航行器(AUV)具有活动范围大、机动性强、智能化程度高等优点,在海洋调查、海洋资源勘探、水下搜救、潜水支援、军事侦探等领域有重大利用价值。
当前,导航问题是AUV所面临的关键挑战之一,由于受到海水介质物理特性的限制和海洋环境条件的影响,水下导航技术面临可用信息源少、水下干扰多、惯性传感器精度难以提升技术难题一直没有被很好地解决。
近些年,随着激光陀螺仪、光纤陀螺仪和小型化及数字化多普勒测速仪(DVL)的出现,大幅度提高了运动速度和航向的测量精度,为AUV组合导航系统的构建提供了关键配套技术和器件。
当前,我国惯性导航技术和国外有很大差距,主要体现在惯性系统总体精度和功能特性,惯性传感器精度,组合滤波算法等方面,在协同导航领域还处于跟跑状态。
陀螺仪的精度对惯性导航的精度起着决定性的作用,近几年新兴起来的基于超冷原子的量子导航技术可使陀螺仪的精度提高3个数量级以上,这将有望使全空域、全时域的无缝导航成为可能。
本文以近十年的研究成果为主,综述典型水下导航技术的应用现状及技术瓶颈,并提出解决技术问题的关键思路。
在此基础上,从3个维度对未来水下导航技术进行了展望。
一、惯性导航技术惯性导航系统(INS)具有完全自主式、隐蔽性好等优点,可以实时输出高精度的位置、姿态、速度信息,适用于全自主水下长时间导航需求,此外还可以方便地与其他导航技术相结合,比如DVL、重力仪等,建立组合导航系统,因而成为当前AUV的首选导航方式,尤其对于隐蔽性要求很高的军事用途的AUV。
随着INS不断发展,一些新型的惯性定位系统也不断涌现,如光子惯性导航系统(PHINS)。
水下机器人避障自主导航研究近年来,随着科技的不断发展,机器人技术逐渐成熟,应用领域也越来越广泛。
水下机器人作为机器人技术的一种,被广泛应用于海洋勘探、船舶维修、潜水探险等领域。
然而,在水下环境中,机器人遇到了许多困难和挑战,如水下水流的复杂变化、海底地形的不规则性、水下能源供应的限制等。
其中,避障是水下机器人面临的一个关键问题。
水下机器人避障自主导航研究是近年来受到广泛关注的一个研究领域。
该领域的研究重点是如何让水下机器人能够感知周围环境,判断障碍物并避免碰撞。
避障自主导航技术的研究对于提高水下机器人的自主能力和应用效率具有重要意义。
一、水下机器人避障自主导航技术的现状目前,水下机器人的避障自主导航技术主要分为基于传感器的方法和基于视觉的方法。
基于传感器的方法主要利用超声波、声呐、激光雷达等传感器,通过扫描周围环境来获取距离、深度等信息,通过算法实现避障。
该方法适用于水下环境中的低可见度、复杂地形等情况。
但是,传感器数据的准确度和稳定性直接影响避障的效果,同时这些传感器的射程和角度都是有限制的,不能完全覆盖机器人周围的环境。
基于视觉的方法则是利用水下相机或激光扫描仪等设备,通过机器视觉算法识别出环境中的障碍物,实现避障。
该方法的优点是可以获取更具体、更全面的环境信息,但是受到水下环境的限制,其适用范围受到了很大的限制。
除此之外,还有一种结合了传感器和视觉的方法,即利用机器视觉技术对图像进行分析,根据分析结果调整传感器的工作参数,从而实现更加精准的避障。
二、水下机器人避障自主导航技术的研究进展目前,水下机器人避障自主导航技术的研究进展较为迅速,主要包括以下几个方面:1. 基于深度学习的机器视觉算法随着深度学习技术的不断发展,水下机器人避障自主导航的机器视觉算法也在不断进步。
利用深度学习算法,可以更加精准地识别出障碍物,并预测其运动轨迹,从而实现更加灵活和高效的避障。
2. 基于多传感器融合的避障方法利用多传感器融合技术,可以将传感器和视觉信息进行整合,提高避障决策的准确性和可靠性。
水下机器人自主导航算法研究在当今科技迅速发展的时代,水下机器人在海洋探索、资源开发、科学研究等众多领域发挥着越来越重要的作用。
而其中,自主导航算法是保障水下机器人能够高效、准确、安全地完成任务的关键技术之一。
水下环境复杂多变,给水下机器人的自主导航带来了巨大的挑战。
与陆地和空中环境相比,水下环境存在着水压、水流、盐度、温度变化等多种因素的影响,而且光线昏暗、可视范围有限,这些都使得获取准确的位置、姿态和速度等信息变得十分困难。
为了实现水下机器人的自主导航,研究人员提出了多种算法和技术。
其中,惯性导航系统是一种常见的方法。
惯性导航系统通过测量加速度和角速度来计算位置和姿态的变化。
然而,由于惯性传感器存在误差积累的问题,长时间运行后会导致导航精度下降。
为了弥补惯性导航系统的不足,研究人员常常将其与其他导航方法结合使用。
例如,与声学导航系统相结合。
声学导航系统可以通过测量声波在水中的传播时间和相位等信息来确定水下机器人的位置。
但声学导航系统也存在一些局限性,比如容易受到环境噪声的干扰,测量精度会受到水温、盐度等因素的影响。
另一种常用的导航方法是基于视觉的导航。
水下机器人可以配备摄像头,通过对周围环境的图像进行分析和处理来获取导航信息。
然而,水下的光线条件差,图像质量往往不高,这就需要先进的图像处理算法来提取有用的特征和信息。
在众多的自主导航算法中,基于模型预测控制(MPC)的算法引起了广泛的关注。
MPC 算法通过建立系统的数学模型,预测未来一段时间内系统的状态,并根据优化目标选择最优的控制输入。
在水下机器人的自主导航中,MPC 算法可以考虑多种约束条件,如避障、能量消耗等,从而实现更加智能和高效的导航。
此外,强化学习算法也在水下机器人自主导航中展现出了潜力。
强化学习算法通过让机器人在与环境的交互中不断学习和优化策略,从而逐渐提高导航性能。
但强化学习算法通常需要大量的训练数据和计算资源,这在实际应用中可能会受到一定的限制。
水下机器人的导航技术和集成研究水下机器人是一种重要的工具,用于深海探测、水下测量和资源开发等领域。
然而,水下环境的特殊性质使得水下机器人的导航任务更加困难。
在水下环境中,地形复杂,信号传播受限,传感器数据有误差,水下通信受限等问题都会影响机器人的导航精度。
因此,水下导航技术的发展和研究对于水下机器人的广泛应用和进一步开发至关重要。
水下机器人的导航任务通常包括自主导航、跟踪和定位。
自主导航是通过机器人自身的传感器获取环境信息,进而计算出机器人的位置、速度和方向,以实现机器人自主控制和导航。
跟踪和定位则是建立在目标检测的基础上,通过跟踪目标实现对机器人轨迹的控制。
因此,水下机器人的导航技术需要同时满足以下几个要求:高精度、高鲁棒性、实时性和自适应性。
水下导航技术包括多种方法,如惯性导航、声纳定位、图像识别和惯导加良 (Inertial Navigation System,INS) 等。
惯性导航是应用惯性测量单元 (Inertial Measurement Unit,IMU) 计算机器人的姿态、加速度和角速度,并利用数学模型计算机器人的位置和轨迹。
这种方法适用于长时间的水下自主导航任务,但是由于惯性传感器有漂移误差,导致误差逐渐累积,最终导致位置偏差较大,因此需要与其它传感器相互辅助。
声纳定位是通过声波传播测量机器人与目标之间的距离,并进一步计算机器人位置。
这种方法在水下环境中被广泛应用。
图像识别则是通过分析水下图像信息计算机器人的位置和姿态,适用于近距离的自主导航等任务。
INS则是通过集成加速度计、陀螺仪和磁强计等传感器获知机器人的运动状态,并通过微积分和数学模型计算机器人位置和姿态。
INS 优点在于精度高、可靠性好,但需要时刻校准误差。
除了单一的导航方法,集成多种导航技术也是一种综合性的导航方法,其优点在于提高导航的精度和鲁棒性。
集成多种导航技术需要建立系统模型,将各种传感器信息进行协调和整合,以提高导航系统的性能。
自主式水下航行器AUV导航技术探讨发布时间:2021-03-25T04:53:30.059Z 来源:《现代电信科技》2020年第16期作者:张宝贵[导读] 针对组合导航技术在AUV发展与应用中的重要地位,文中详细介绍了各种AUV导航技术发展概况,并着重对各种组合导航技术的发展情况进行了分析研究。
(中国船舶集团有限公司第七一〇研究所湖北宜昌 443003)摘要:针对组合导航技术在AUV发展与应用中的重要地位,文中详细介绍了各种AUV导航技术发展概况,并着重对各种组合导航技术的发展情况进行了分析研究。
可以看出,未来AUV的导航技术仍将是以INS为主的组合导航。
INS/地磁匹配组合导航、INS/重力匹配组合导航等地球物理组合导航将在军事领域发挥更加强大的作用;INS/LBL组合导航技术则将更加广泛地应用于民用领域。
关键词:自主式;水下航行器;AUV导航技术引言21世纪以来,随着人类在利用海洋和开发海洋上的投入不断增大,自主式水下航行器(AUV)引起了越来越多的关注,无论在战场监视、隐蔽打击等军用领域还是在海水检测、海洋地质勘探等民用领域都得到快速发展。
导航是指移动机器人借助传感器获知本体状态,完成从初始位置到达目标位置的自主运动过程。
导航技术作为AUV的核心技术,也是最难以解决的关键技术之一。
组合导航方法,是由2种及以上导航技术结合形成的综合导航系统。
组合导航结合不同导航技术的优点,能够增强导航系统的稳定性、精确性和持久性,是当前使用最广泛的导航方法,也是未来AUV导航技术的发展方向。
目前,针对AUV的导航技术大体可分为传统导航和非传统导航技术2类。
传统导航技术主要包括航位推算导航、惯性导航和声学导航等。
与非传统导航相比技术更为成熟,使用范围更加广泛。
非传统导航技术主要包括地球物理导航、视觉导航等,是发达国家大力研发的新兴导航技术,通常用来辅助惯性导航。
1 航位推算导航航位推算导航最早于16世纪提出,但当时很少用于水下。
本科毕业设计论文题目水下无人航行器组合导航研究专业名称学生姓名指导教师毕业时间2014.06毕业任务书一、题目水下无人航行器组合导航研究二、指导思想和目的要求1.利用已有的专业知识,培养学生的解决实际工程问题的能力2.锻炼学生的科研工作能力和培养学生团队合作及攻关能力三、主要技术指标1.捷联惯导原理分析及模型建立2.应用卡尔曼滤波方法建立组合导航系统模型3.应用matlab进行仿真实现四、进度和要求第01周----第02周:撰写开题报告;第03周----第05周:组合导航相关基础知识学习;第06周----第07周:熟悉Matlab等相关软件;第08周----第13周:设计组合导航滤波方案和滤波器结构;第14周----第16周:对设计方案进行实验验证;第17周----第18周:撰写毕业设计论文,论文答辩。
五、主要参考书及参考资料[1]胡小平.自主导航理论与应用.国防科技大学出版社.2002.[2]万海. 多传感器数据融合及其应用. 西安电子科技大学出版社. 2004.[3]干国强. 导航与定位. 国防工业出版社. 2000.[4]秦永元. 卡尔曼滤波与组合导航原理西北工业大学. 1998.[5]邹维宝. INS/GNSS/SAR组合导航系统及其智能化信息融合技术的研究. 西北工业大学.[6]Dasgupta Sumantra. An augmented-reality-based real-time panoramicvision System for autonomous navigation.IEEE Transactions on Systems,Man,and Cybernetics Part A:Systems and Humans.2006.I[7]Kalman R E. A new approach to liner filtering and prediction problemsJournal of Basic Engineering Trans.On ASME. 1960.学生___________ 指导教师___________ 系主任___________II摘要传统的导航系统很难满足水下航行器精确导航定位的要求,尤其在长续航、大航程时问题尤为突出。
本文结合国内外导航技术发展的实际状况和发展方向,同时考虑水下航行器使用的特殊性,设计了水下航行器组合导航系统,通过定时引入GPS导航信息,解决了捷联惯导和多普勒组合导航情况下,定位误差随时间而积累的问题,通过仿真研究,结果表明本文所研究的设计方案合理,能够效提高长续航、大航程时水下航行器的定位精度。
全文理论研究工作和研究成果如下:1 水下航行器的捷联惯导系统设计。
详细推理了捷联惯导系统的基本导航算法,进行了捷联惯导基本的位置、速度、姿态的公式推理。
并系统分析了捷联式惯导系统的误差特性,同时建立了其误差模型方程。
2研究了全球定位系统(GPS)和多普勒导航系统。
对全球定位系统和多普勒导航系统导航定位的基本组成、导航原理进行了研究,分析了其误差来源并建立了相应的误差基本模型。
3设计了水下航行器组合导航系统。
在综合各种导航系统误差的基础上,针对长续航、大航程水下航行器的导航特点,通过航行器定时上浮接受GPS导航信息,设计了水下航行器组合导航系统。
仿真结果表明在定时引入GPS导航信息后,该导航系统能够使水下航行器定位精度有很大提高,基本克服了SINS/DVL 组合导航系统中定位误差随时间累积的问题。
关键词:水下航行器,捷联惯性导航,GPS,多普勒导航,组合导航IIIABSTRACTAs the traditional Navigation System can’t satisfy the requirements of the Navigating position of the Autonomous Underwater Vehicles(AUV),especially in the long time and long range travel. Based on the practical thing and the developments of navigation technique,we design the Integrated Navigation System of the AUV in this paper. Using timing introducing GPS navigation information,we solve the question of the positional error accumulated with the time due to strapdown inertial navigation system(SINS) and DoppIer Navigation System.And by means of simulation study,the result indicates that the design method in this paper is proper,which can increase the positioning accuracy of UA V in the long time and long range travel.The main research work is done as follows:Design the strapdown inertial navigation system of AUV. The basic navigation algorithm of SINS is inferenced detailedly.We make the formula derivation of the basic position, speed and attitude of the strapdown inertial navigation,and analysis the error characteristics of SINS systematically.And at the same time we establish its error model equation.Research the composition of GPS,the basic principle of navigation position一setting,and the analysis of data error.Aimed at the different error source,this paper establish the variant basic error model.This paper detailedly Introduce the Doppler velometer, electric gyrocompass and strapdown flux一gate azimuth finder,and so on,which compose the Doppler navigation system.Research the operating principle and error source of the subsystem. Deduce the error formula,and establish its error model.Design of the Integrated Navigation system of AUV. Based on the various navigation system error,aimed at the navigation characteristic in the long time and long range travel,by means of the vehicle receiving the GPS Navigation information by timing rise,we design the Integrated Navigation System.The simulation resultIVshows that after timing introducing GPS Navigation information this navigation system can increase the positioning accuracy evidently,and overcome the question of the positional error accumulated with the of time in SINS/DVL Integrated Navigation.KEY WORDS: AUV,SINS ,GPS ,doppler ,navigation system integrated navigationV目录第一章绪论 (8)1.1导航系统的发展概述 (8)1.2水下航行器的发展与趋势 (11)1.3惯性组合导航在水下航行器中应用的背景及意义 (13)1.4组合导航系统的构成方法和功能 (14)1.5论文的研究内容及结构安排 (15)第二章捷联惯导系统 (16)2.1引言 (16)2.2坐标系及其转换 (16)2.2.1坐标系定义 (16)2.2.2坐标转换关系 (17)2.2.3地球参数 (20)2.3捷联惯导力学编排方程 (21)2.3.1姿态更新算法 (21)2.3.2速度更新算法 (24)2.3.3位置更新算法 (25)2.4捷联惯导误差分析 (26)2.4.1惯性器件误差模型 (26)2.4.2捷联惯导误差方程 (27)2.5捷联惯导算法仿真与分析 (31)2.5.1运动轨迹生成 (31)2.5.2捷联惯导算法误差的仿真与分析 (32)第三章DVL和GPS卫星导航系统 (36)3.1 多普勒计程仪 (36)VI3.2 全球卫星定位系统GPS (38)3.2.1引言 (38)3.2.2GPS工作原理及特点 (38)3.2.3GPS导航误差来源 (41)3.2.4GPS误差模型 (43)3.3本章小结 (44)第四章组合导航系统 (45)4.1序言 (45)4.2卡尔曼滤波算法 (45)4.3系统方程的离散化 (47)4.4组合导航系统模型 (48)4.4.1INS/DVL组合导航系统模型 (48)4.5INS/GPS/DVL组合导航系统模型 (51)4.5.1状态方程 (51)4.5.1量测方程 (53)4.6组合导航系统仿真 (54)参考文献 (58)致谢............................................................................................ 错误!未定义书签。