一种水下航行器组合导航系统研究_张福斌
- 格式:pdf
- 大小:193.20 KB
- 文档页数:3
本科毕业设计论文题目水下无人航行器组合导航研究专业名称学生姓名指导教师毕业时间2014.06毕业任务书一、题目水下无人航行器组合导航研究二、指导思想和目的要求1.利用已有的专业知识,培养学生的解决实际工程问题的能力2.锻炼学生的科研工作能力和培养学生团队合作及攻关能力三、主要技术指标1.捷联惯导原理分析及模型建立2.应用卡尔曼滤波方法建立组合导航系统模型3.应用matlab进行仿真实现四、进度和要求第01周----第02周:撰写开题报告;第03周----第05周:组合导航相关基础知识学习;第06周----第07周:熟悉Matlab等相关软件;第08周----第13周:设计组合导航滤波方案和滤波器结构;第14周----第16周:对设计方案进行实验验证;第17周----第18周:撰写毕业设计论文,论文答辩。
五、主要参考书及参考资料[1]胡小平.自主导航理论与应用.国防科技大学出版社.2002.[2]万海. 多传感器数据融合及其应用. 西安电子科技大学出版社. 2004.[3]干国强. 导航与定位. 国防工业出版社. 2000.[4]秦永元. 卡尔曼滤波与组合导航原理西北工业大学. 1998.[5]邹维宝. INS/GNSS/SAR组合导航系统及其智能化信息融合技术的研究. 西北工业大学.[6]Dasgupta Sumantra. An augmented-reality-based real-time panoramicvision System for autonomous navigation.IEEE Transactions on Systems,Man,and Cybernetics Part A:Systems and Humans.2006.I[7]Kalman R E. A new approach to liner filtering and prediction problemsJournal of Basic Engineering Trans.On ASME. 1960.学生___________ 指导教师___________ 系主任___________II摘要传统的导航系统很难满足水下航行器精确导航定位的要求,尤其在长续航、大航程时问题尤为突出。
一种组合式水下导航定位方法研究由于水下复杂的环境,单一导航系统有着很大的局限性,对现代导航与定位技术的分析,基于技术实现难度和成本价格的考量,采用浮式中继站的方法,将GPS定位与惯性导航技术结合在一起,优化传统的水下导航方式,构建一种新型水下组合导航和定位方案,尽可能使单一的导航和定位系统充分发挥本身的优点,经过仿真测试,达到水下准确定位与导航的目的。
标签:水下导航;组合式水下定位;浮式中继站1、组合式导航原理本组合式导航系统采用惯性系统以外的辅助导航信息源(GPS导航技术)以提高导航的精度。
整体采用GPS与捷联式导航相结合的方式,为最大效率发挥浮式中继站的优点,使导航距离尽量缩小(仅限于水下部分),水面上探测器和浮式中继站采用GPS导航,待到探测器到达指定工作区域将要潜到水下时,捷联式惯性导航启动,同时探测器与浮式中继站的位置也进行初始化。
通过将捷联式惯导输出的信号与GPS相同量的独立值进行比较,利用最优控制理论和卡尔曼滤波组合的滤波器处理信号和高斯白噪声,可以得出系统误差的最小值,确定修正量,从而将两种导航方式有机地结合在一起实现组合式导航。
2、导航方案设计2.1 水面导航对于水面的导航只需要采用现在成熟的GPS导航技术便可解决,为此本文在浮式中继站上搭载GPS模块,然后通过定位获取准确的浮式中继站的位置A (x,y,z)。
对于探测器的导航,本文采用捷联式惯性导航,在探测器上搭载陀螺仪和加速度计等传感器进行探测器的位置和姿态的解算。
2.2 GPS/INS(捷联式惯性导航)组合导航整合算法组合导航算法中,水面浮式中继站的位置信息可以由GPS模块导出位置信息G(X,Y,Z),对惯性导航的探测器来说,需要探测器的各向的加速度分量,在本文中由于探测器中安装有水压力传感器,可以在得出水压力传感器数据经过微型计算机处理得出探测器的水下的高度H,所以只对探测器加速度的a1(前后)、a2(左右)分量进行采集即可算出探测器的x轴和y轴的距离,进而可以得到探测器的理论位置t:,x轴位移为:3、系统误差模型建立本文对系统存在的各种误差进行了研究和分析,为了获得更为准确的数据,实现精确导航,需要对这些误差进行补偿,补偿的方法有动态误差补偿、常值偏差测定等。
一种基于虚拟移动长基线的多AUV协同导航算法
张福斌;马朋
【期刊名称】《鱼雷技术》
【年(卷),期】2013(000)002
【摘要】高精度的协同导航定位是多自主水下航行器(MAUVs)协同作业的基础,协同导航算法是多 AUV 协同的关键技术。
针对双领航者广播通信模式下的多
AUV 协同导航系统,基于移动长基线(MLBL)导航理论,提出并建立了一种虚拟移动长基线(SMLBL)协同导航模型,应用加权最小二乘法,设计了基于单向水声通信的协同导航算法,使得跟随AUV 内、外部导航信息得到有效融合。
仿真结果表明,该算法可大幅度提高跟随 AUV 的导航定位精度。
【总页数】5页(P115-119)
【作者】张福斌;马朋
【作者单位】西北工业大学航海学院,陕西西安,710072;西北工业大学航海学院,陕西西安,710072
【正文语种】中文
【中图分类】TJ630.33
【相关文献】
1.一种基于UKF的AUV移动声学网络协同导航方法 [J], 刘明雍;沈超;张立川;龚
雪晴
2.双伪测量的多水下航行器移动长基线协同导航算法 [J], 张立川;徐德民;刘明雍
3.一种基于量测伪距的EKF移动长基线AUV协同导航方法 [J], 刘明雍;黄博;蔡挺
4.基于AUVs的水下移动无线传感器网络愈合算法 [J], 梁文辉;董强;何明;陈秋丽;丁晨璐
5.基于交互式模型的多AUV协同导航鲁棒性滤波算法 [J], 徐博;刘德政;张勋因版权原因,仅展示原文概要,查看原文内容请购买。
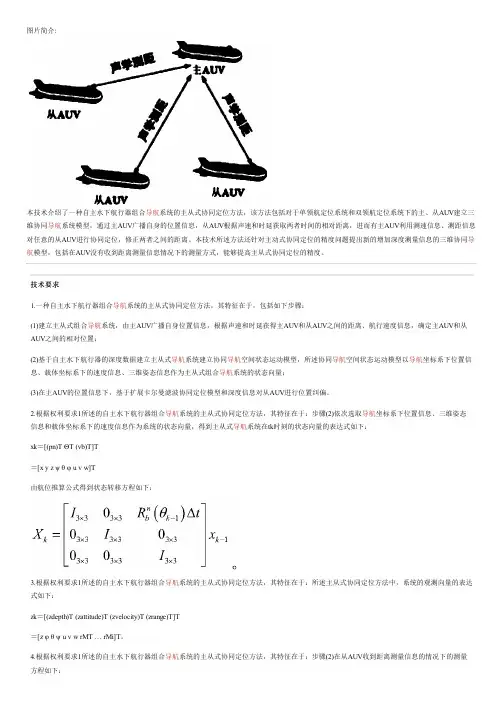
图片简介:本技术介绍了一种自主水下航行器组合导航系统的主从式协同定位方法,该方法包括对于单领航定位系统和双领航定位系统下的主、从AUV建立三维协同导航系统模型,通过主AUV广播自身的位置信息,从AUV根据声速和时延获取两者时间的相对距离,进而有主AUV利用测速信息、测距信息对任意的从AUV进行协同定位,修正两者之间的距离。
本技术所述方法还针对主动式协同定位的精度问题提出新的增加深度测量信息的三维协同导航模型,包括在AUV没有收到距离测量信息情况下的测量方式,能够提高主从式协同定位的精度。
技术要求1.一种自主水下航行器组合导航系统的主从式协同定位方法,其特征在于,包括如下步骤:(1)建立主从式组合导航系统,由主AUV广播自身位置信息,根据声速和时延获得主AUV和从AUV之间的距离、航行速度信息,确定主AUV和从AUV之间的相对位置;(2)基于自主水下航行器的深度数据建立主从式导航系统建立协同导航空间状态运动模型,所述协同导航空间状态运动模型以导航坐标系下位置信息、载体坐标系下的速度信息、三维姿态信息作为主从式组合导航系统的状态向量;(3)在主AUV的位置信息下,基于扩展卡尔曼滤波协同定位模型和深度信息对从AUV进行位置纠偏。
2.根据权利要求1所述的自主水下航行器组合导航系统的主从式协同定位方法,其特征在于:步骤(2)依次选取导航坐标系下位置信息、三维姿态信息和载体坐标系下的速度信息作为系统的状态向量,得到主从式导航系统在tk时刻的状态向量的表达式如下:xk=[(pn)T ΘT (vb)T]T=[x y z ψ θ φ u v w]T由航位推算公式得到状态转移方程如下:3.根据权利要求1所述的自主水下航行器组合导航系统的主从式协同定位方法,其特征在于:所述主从式协同定位方法中,系统的观测向量的表达式如下:zk=[(zdepth)T (zattitude)T (zvelocity)T (zrange)T]T=[z φ θ ψ u v w rMT … rMi]T。
基于VxWorks的水下航行器组合导航系统设计
李慧平;张福斌;徐德民;卢淑娟
【期刊名称】《计算机测量与控制》
【年(卷),期】2008(16)10
【摘要】提出了一种在PC104硬件平台上,以VxWorks为实时操作系统的水下航行器组合导航系统设计方案;介绍了硬件组成原理,设计了基于联邦滤波器的数据融合算法,着重给出了基于VxWorks实时多任务软件的设计过程,包括软件层次设计和具体任务设计;由于采用了联邦滤波融合算法和嵌入式多任务实时操作系统,与传统的导航系统相比,设计的组合导航系统不但导航精度提高而且实时性大大增强;实验结论表明设计的组合导航系统高效可靠.
【总页数】3页(P1451-1453)
【作者】李慧平;张福斌;徐德民;卢淑娟
【作者单位】西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072;水下信息处理与控制国家级重点实验室,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072;水下信息处理与控制国家级重点实验室,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072
【正文语种】中文
【中图分类】U666.11
【相关文献】
1.联邦卡尔曼滤波在水下航行器组合导航系统中的应用 [J], 王其;杨常松
2.基于VxWorks的无人机组合导航系统软件设计 [J], 李厚春
3.自主水下航行器的组合导航系统综述 [J], 郭银景;孔芳;张曼琳;吕文红;吕振义
4.模糊自适应滤波算法在自主水下航行器组合导航系统中的应用 [J], 朱倚娴;周玲
5.模糊自适应滤波算法在自主水下航行器组合导航系统中的应用 [J], 朱倚娴;周玲因版权原因,仅展示原文概要,查看原文内容请购买。
自主水下航行器导航技术
严卫生;徐德民;李俊;张福斌
【期刊名称】《火力与指挥控制》
【年(卷),期】2004(029)006
【摘要】水下导航技术是自主水下航行器发性及国外的发展概况,对国外水下航行器所采用的导航技术进行了综述,并就我国应采取的对策与措施提出建议.
【总页数】6页(P11-15,19)
【作者】严卫生;徐德民;李俊;张福斌
【作者单位】西北工业大学航海工程学院,陕西,西安,710072;西北工业大学航海工程学院,陕西,西安,710072;西北工业大学航海工程学院,陕西,西安,710072;西北工业大学航海工程学院,陕西,西安,710072
【正文语种】中文
【中图分类】V249.3
【相关文献】
1.GPS技术、惯性导航技术和组合导航技术在汽车导航中的应用 [J], 方珉;刘星荣
2.导航战背景下的天文导航技术--天文导航技术的历史、现状及其发展趋势 [J], 王安国
3.自主水下航行器导航技术发展现状与分析 [J], 张世童; 张宏伟; 王延辉; 张玉鹏; 谢阳光
4.模糊自适应滤波算法在自主水下航行器组合导航系统中的应用 [J], 朱倚娴;周玲
5.2013中国传感测量与导航技术发展高峰论坛暨2013中国嵌入式系统年会 2013
中国电子测量与导航技术发展高峰论坛第23届全国测控、计量、仪器仪表学术年会中国仪器仪表学会空间仪器分会(筹)筹备会联合大会会议通知 [J], 大会组委会
因版权原因,仅展示原文概要,查看原文内容请购买。