汽车ecu bms通信协议标准
- 格式:docx
- 大小:37.94 KB
- 文档页数:5
电动汽车有限公司CAN网络通讯协议BMS外网协议分册Version 2.10编制说明1.本协议定义的传输速率为250 Kbit/s2.该协议主要定义电源管理系统相关协议3.本文一经发布,在新版本发布之前持续有有效4.本文经由设计开发部发布,如有问题请及时反馈目录1. 电池基本信息1 BMS_INF ID: 0x18F212F3 - 5 -2. 电池故障报警信息FAU_ALA ID: 0x18F214F3 - 6 -3. 电池基本信息2NOM_PAR ID: 0x181817F3 - 8 -4. 电池模块唯一编号信息 MUN_ID ID: 0x185717F3 - 9 -5. 电池模块基本信息 MNOM_PAR ID: 0x181D17F3 - 10 -6. 电池模块电压、温度信息#1 MVT_PAR1 ID: 0x181E17F3 - 11 -7. 电池模块电压、温度信息#2 MVT_PAR2 ID: 0x181F17F3 - 12 -8. 单体电压信息#1~43CELL_V1ID: 0x182417F3…0x184E17F3- 13 -9. 模块内电池温度信息 CELL_T ID: 0x184F17F3 - 15 -10. 电池管理系统发出指令和状态#1 BMS_SDA ID: 0x1857E4F3 - 16 -11. 电池管理系统发出指令和状态#2 BMS_SDB ID: 0x1858E4F3 - 17 -12. 充电机信息帧 CHAR_SD ID: 0x18F322E4 - 18 -电池管理系统协议本小节仅定义了电池管理系统向外部发送数据的协议,其规则说明如下:a.电池管理系统向外部每次发送数据的起始帧总是以0x18F212F3开始,且每发送一次整车电池数据只发送一次0x18F212F3数据帧,对于模块单体电压在一次整车电池数据发送过程中需要重复发送ID相同的不同模块号的单体信息。
b. 协议中无效的或预留的字节以FFH 填充,无效或预留的位均置为1c. 本规定中一个电池模块定义了最多128 个单体电池的信息,传输中根据实际单体电池数量只需传送和接收相应的单体电池信息。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
纯电动车BMS与整车系统CAN通信协议详情随着环保意识的增强和电动车市场的迅速发展,纯电动车(Battery Electric Vehicle,BEV)作为零排放、零尾气的新能源汽车正逐渐受到人们的关注和青睐。
在纯电动车的电池管理系统(Battery Management System,BMS)中,与整车系统之间的通信协议变得尤为重要。
本文将详细介绍纯电动车BMS与整车系统CAN通信协议的相关内容。
一、纯电动车BMS与整车系统的关系纯电动车的BMS作为一套独立的系统,主要用于监测和管理电池组的状态、实时数据采集、故障诊断以及能量管理等功能。
而整车系统则负责电动车的整体控制,包括电机控制、车速控制、动力分配等。
BMS与整车系统之间的通信,可以实现BMS对整车系统的控制和监控,保证电池组和整车系统的协调运行,提高电动车的安全性和性能。
二、CAN通信协议的基本原理控制器局域网络(Controller Area Network,CAN)是一种广泛应用于汽车、工业自动化等领域的通信协议。
CAN总线采用串行通信方式,具有高可靠性、抗干扰能力强的特点,在电动车领域得到了广泛应用。
CAN协议定义了通信的物理层、数据链路层和应用层,保证了数据的可靠传输和节点间的高效通信。
三、CAN通信协议在纯电动车BMS与整车系统中的应用1. 数据交互:CAN通信协议在BMS和整车系统之间实现了数据的双向交互。
BMS可以向整车系统提供电池组的相关信息,如电池电压、电流、温度等。
同时,整车系统也可以向BMS发送指令,如充电指令、功率调节指令等。
2. 故障诊断:CAN通信协议可以实现对电池组和整车系统的故障诊断。
当BMS检测到电池组或整车系统存在异常情况时,会通过CAN总线将故障码发送给整车系统,从而实现故障的定位和诊断。
3. 控制策略:CAN通信协议可以实现BMS对整车系统的控制。
例如,BMS可以根据电池组的状态和整车系统的需求,发送合适的控制策略给整车系统,如调节电机的输出功率、控制充放电速度等。
秘级:内部纯电动汽车动力总成系统网络总线通讯协议五、通信协议1 整车控制器与BMS网络 CAN1(对外) 250kbps 整车控制器整车控制器#1:PVCU1 (ID:0x1000EFD0)整车控制器#2:PVCU2 转发电机1报文1 MCU_TrqSpd (VCU 发送)变速器发送频率: 1000ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号: 0xff4B SA:0xEF ID:0x18ff4BEF字节: 1-2 M_Torque1 主电机实际转矩比例偏移-32003-4 M_Speed 电机实际转速比例偏移-80005-6 母线电压7-8 母线电流整车控制器#3:PVCU3 转发电机报文MCU_Temp (VCU 发送)变速器发送频率: 1000ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号: 0xff4c SA:0xEFID:0x18ff4CEF字节: 1 M_Motor_Temperature1 主电机温度比例1 偏移-40 2 控制器温度3 主逆变器温度:比例1 偏移-40 IGBT温度4 故障代码5故障代码:" 1 超速报警代码"" 3 欠压报警"" 4 过压报警"" 5 A相IGBT1报警"" 6 B相IGBT3报警"" 7 C相IGBT5报警"" 8 A相硬件过流保护 "" 9 B相硬件过流保护"" 10 正常 "" 12 过电流报警"" 15 旋变错误报警"" 17 A相电流传感器零票故障"" 18 B相电流传感器零票故障"" 26 IGBT温度传感器开路"" 27 温度传感器开路"" 28 箱体温度传感器开路"" 29 电机温度传感器开路"" 30 IGBT温度传感器短路"" 31 温度传感器短路"" 32 箱体温度传感器短路"" 33 电机温度传感器短路"" 34 IGBT1过温"" 36 箱体过温"" 37 电机过温"整车控制器#4:PVCU4(ID:0x18fff5D0)没有用??BMSCmd:bit0:1预充命令bit1:1正极接触器闭合bit2:1 负极接触器闭合(需要提供高压电路图来确定逻辑)BMS报文参见BMS CAN协议BMS2: ID:0x0x14 22 D0 D2字节: 3 最大允许放电电流单位增益:2A/bit 范围:0-500A/0-FAh4 最大允许充电电流单位增益:2A/bit 范围:0-500A/0-FAh5 SOC6 母线电压7 母线电流2、VCU-MC网络2.1VCU发送报文2.1 .1Current 、power、Pad发送频率:10ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 0参数组号:ID:0x1000EFD0字节: 1 电机控制模式命令 bit4:整车请求电机使能 bit7:转矩模式bit8:调速模式23-4 驱动电机目标转矩5-6 驱动电机目标转速782.1 .2 Pad/IO 内部检测用VCU发送频率:收到标定报文后发送 1000ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 0参数组号:ID:0x0CF106D0字节: 1 加速踏板1AD2 加速踏板2AD3 制动踏板1AD4 制动踏板2AD5: bit1:N档 bit2:D档 bit4:R档 bit5:制动有效 bit6:加速有效Bit7:KeyOn(没用)6Bit1-3: HU85St0 off;1 on;2 OpenLoad;3 OverLoad;Bit4-6: ACCPowerSt0 off;1 on;2 OpenLoad;3 OverLoad;7-8.3 Pad/IO 内部检测用VCU发送频率:收到标定报文后发送 1000ms 数据长度: 4字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 0参数组号:ID:0x0CF107D0字节:1-2 EPROM值地址 3-4 EPROM存储的值 MC发送报文(MC1 发送)发送频率: 500ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号: 0xff4A SA:0xEFID:0x18ff4AEF字节: 1-2 NOP3 位 1NOP5-2 Main mode Motor status Bit1:ReadyBit4 err7-6 Pre_Charge0:close1:open2:无效3:无效4 NOP5 NOP6 NOP78 MC_Err故障代码:" 1 超速报警代码"" 3 欠压报警"" 4 过压报警"" 5 A相IGBT1报警"" 6 B相IGBT3报警"" 7 C相IGBT5报警"" 8 A相硬件过流保护 " " 9 B相硬件过流保护" " 10 正常 "" 12 过电流报警"" 15 旋变错误报警"" 17 A相电流传感器零票故障" " 18 B相电流传感器零票故障" " 26 IGBT温度传感器开路"" 27 温度传感器开路" " 28 箱体温度传感器开路" " 29 电机温度传感器开路" " 30 IGBT温度传感器短路" " 31 温度传感器短路"" 32 箱体温度传感器短路" " 33 电机温度传感器短路" " 34 IGBT1过温"" 36 箱体过温"" 37 电机过温"MCU_TrqSpd (MC2 发送)发送频率: 500ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号: 0xff4B SA:0xEFID:0x18ff4BEF字节: 1-2 M_Torque1 主电机实际转矩比例1 偏移-320003-4 M_Speed 电机实际转速比例1 偏移-320005-6 M_DC_Voltage1 电机直流电压比例因子1 偏移0 new7 M_Motor_Temperature1 主电机温度比例1 偏移-408 主逆变器温度:比例1 偏移-40MCU_VoltCurrentTemp (MC3 发送)发送频率: 500ms数据长度: 8字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号: 0xff4c SA:0xEFID:0x18ff4CEF字节: 1-2 位 13-1 M_DC_Voltage1 电机直流电压比例因子1 偏移03-4 位 13-1 M_DC_Current 电机直流电流比例 1 偏移-400 (无)562.3 标定报文内部用发送频率: 100ms数据长度: 1字节数据页数: 0协议数据单元格式:协议数据单元特性:默认优先级: 0参数组号:ID: 0x1800d029字节: 1 Bit1:标定当前ACCPad的AD值为MAXBit2:标定当前ACCPad的AD值为MinBit3:标定当前BreakPad的AD值为MAXBit4:标定当前BreakPad的AD值为MinBit7:写EPROM信息Bit8:读取EPROM储存的值2-3 读取/写入EPROM值的地址(仅仅用到了byte2) 4-5 写入数据7-8 Nopn(r/s)TmaxT 额定AT24C256存储芯片中存储数据的定义0x0010最大限速转速n6六.插件信号定义线束护套 1393450-1(52pin插孔)、1393454-6(52pin插孔护板)、1393436-1(28pin插孔)、1393454-1(28pin插孔护板)控制器插件: AMP1743275 线径选用序号定义序号定义序号定义序号定义1蓄电池负214161备注:表格空白处为预备接口,具体详见方案。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System,以下简称BMS)与电机控制器(Vehicle Control Unit,简称VCU)、智能充电机(Intelligent Charger Unit,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN标识符为29位,通信波特率为250kbps。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road Vehicles –Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling).SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议第11部分:物理层,250Kbps,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair).SAE J1939-21:2006商用车控制系统局域网络(CAN)通信协议第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
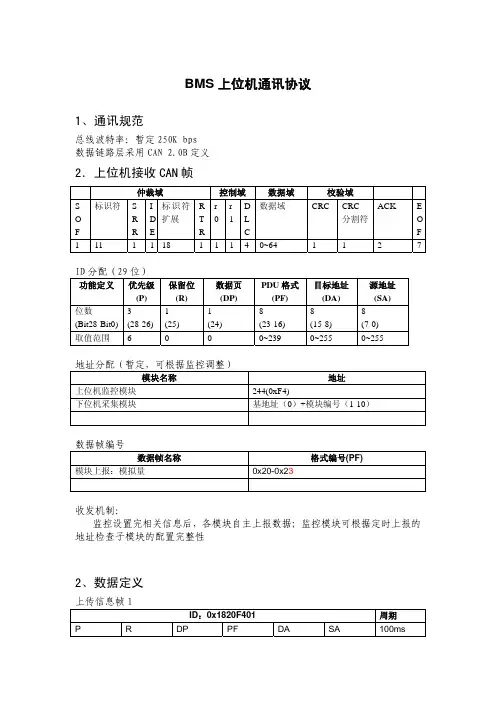
BMS上位机通讯协议1、通讯规范总线波特率:暂定250K bps数据链路层采用CAN 2.0B定义2.上位机接收CAN帧仲裁域控制域数据域校验域S O F 标识符SRRIDE标识符扩展RTRrr1DLC数据域 CRCCRC分割符ACK EOF1 11 1 1 18 1 1140~64 1 12 7 ID分配(29位)功能定义优先级(P) 保留位(R)数据页(DP)PDU格式(PF)目标地址(DA)源地址(SA)位数(Bit28-Bit0) 3(28-26)1(25)1(24)8(23-16)8(15-8)8(7-0)取值范围 6 0 0 0~239 0~255 0~255地址分配(暂定,可根据监控调整)模块名称地址上位机监控模块 244(0xF4)下位机采集模块基地址(0)+模块编号(1-10)数据帧编号数据帧名称格式编号(PF)模块上报:模拟量0x20-0x23收发机制:监控设置完相关信息后,各模块自主上报数据;监控模块可根据定时上报的地址检查子模块的配置完整性2、数据定义上传信息帧1ID:0x1820F401 周期P R DP PF DA SA 100ms6 0 0 32 (0x20)监控模块 采集模块 数据位置 数据名格式说明BYTE1 本模块第一节单体电压低字节 BYTE2 本模块第一节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第二节单体电压低字节 BYTE4 本模块第二节单体电压高字节 同上BYTE5 本模块第三节单体电压低字节 BYTE6 本模块第三节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上上传信息帧2ID: 0x1821F401周期P R DP PF DA SA 6 0 0 33 (0x21)监控模块 采集模块100ms数据位置 数据名格式说明BYTE1 本模块第四节单体电压低字节 BYTE2 本模块第四节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第五节单体电压低字节 BYTE4 本模块第五节单体电压高字节 同上BYTE5 本模块第六节单体电压低字节 BYTE6 本模块第六节单体电压高字节 同上 BYTE7 模块号 BYTE8箱号同上上传信息帧3ID: 0x1822F401周期P R DP PF DA SA 6 0 0 34 (0x22)监控模块 采集模块100ms数据位置 数据名格式说明BYTE1 本模块第七节单体电压低字节 BYTE2 本模块第七节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第八节单体电压低字节 BYTE4 本模块第八节单体电压高字节 同上BYTE5 本模块第九节单体电压低字节 BYTE6 本模块第九节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上上传信息帧4ID: 0x1823F401周期P R DP PF DA SA 6 0 0 35 (0x23)监控模块 采集模块100ms数据位置 数据名格式说明 BYTE1 本模块第十节单体电压低字节 BYTE2 本模块第十节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第十一节单体电压低字节 BYTE4 本模块第十一单体电压高字节 同上BYTE5 本模块第十二节单体电压低字节 BYTE6 本模块第十二节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上。
纯电动车BMS与整车系统CAN通信协议书范本【注意:以下协议书范本仅为演示用途,实际情况可根据具体需求进行相应调整】一、引言本协议书旨在规范纯电动车电池管理系统(BMS)与整车系统之间的通信协议,确保两个系统之间的数据交换和信息传输的稳定和准确。
该通信协议基于控制器局域网(Controller Area Network,CAN)技术,并遵循相关国际标准。
本协议书适用于车辆制造商、BMS供应商以及相关技术人员。
二、通信协议规范1. CAN通信协议a. CAN通信速率:根据实际车辆需求确定,一般为250kbps或500kbps。
b. CAN物理层:遵循ISO 11898标准。
c. CAN帧格式:使用标准CAN 2.0A或CAN 2.0B帧格式。
d. CAN标识符:根据车辆厂商约定进行分配。
e. BMS节点:BMS设备在CAN总线上作为一个节点存在,使用独立的CAN标识符进行通信。
2. 数据格式a. 数据长度:BMS与整车系统之间交换的数据长度为8字节,每个字节包含8位。
b. 数据格式:BMS与整车系统采用统一的数据格式,包括数据类型、数据单位等信息。
具体格式由车辆制造商和BMS供应商协商确定。
3. 数据交互a. 数据采集:BMS负责采集电池相关参数,如电压、温度、电流等。
b. 数据传输:BMS将采集到的数据通过CAN总线传输给整车系统。
c. 故障诊断:整车系统可向BMS发送命令以获取电池状态、报警信息等。
d. 数据解析:整车系统根据协议定义解析接收到的数据,以确保准确读取和使用。
4. 错误处理a. 数据校验:BMS和整车系统使用CRC校验确保数据传输的准确性。
b. 异常处理:BMS和整车系统应具备异常处理机制,对通信错误和故障进行处理和报警。
5. 通信安全性a. 数据加密:可根据实际需求采用加密技术,确保通信数据的安全性。
b. 认证授权:BMS与整车系统之间的通信可采用认证和授权机制,确保只有合法的系统才能进行通信。

文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
竭诚为您提供优质文档/双击可除ecu通讯协议篇一:整车控制器通信协议最新版纯电动汽车动力系统网络通信协议Version090302本协议仅用于纯电动汽车动力系统的电子控制单元(ecu)之间进行控制器局域网络(传输速率500kbit/s)数字信息交换。
1本协议适用范围本协议仅用于纯电动汽车动力系统电子控制单元之间的网络互通互连,使控制系统能正常工作。
2连接器管脚定义采用db9插头,can-h(pin7)、can-l(pin2)、屏蔽线(pin5)、gnd(pin3,6)。
3报文格式本协议采用29位扩展帧,符合sae1939协议,图2所示为can扩展帧格式。
4ecu的名称本协议对网络上的每个ecu节点都规定了一个名称,名称表示了其所执行5动力系统can网络通信速率电动汽车通信网络采用500kbps的通信速率。
6纯电动汽车动力系统网络通信报文6.1整车控制器(Vcu)6.1.1Vcu发送的数据帧(Vcu2mcu)注:电机给定转矩为带符号12位数据。
两字节数据低字节在前,高字节在后;同一字节中高位在前,低位在后。
6.2电机控制器(mcu)6.2.1mcu上传给Vcu的数据帧a(mcu2Vcua)电机驱动器直流总线电压为无符号12位数据;两字节数据低字节在前,高字节在后;同一字节中高位在前,低位在后。
6.2.2mcu上传给Vcu的数据帧b(mcu2Vcub)两字节数据低字节在前,高字节在后;同一字节中高位在前,低位在后。
6.2.3mcu控制参数表篇二:电动汽车通讯协议文件编号:tkc/js(s)-eV33文件版本号:0/a版安徽天康特种车辆装备有限公司纯电动专用车辆通讯协议(VeR1.2)编制:审核:批准:发布日期:20xx年12月22日实施日期:20xx年12月22日安徽天康特种车辆装备有限公司1纯电动专用车辆通讯协议(VeR1.2)协议参考saej1939,can2.0b,peV-canbus20xx1114等。
纯电动车BMS和整车系统CAN通信协议书模板引言:BMS(电池管理系统)是一种用于监控和管理纯电动车辆电池状况的重要系统。
而CAN(Controller Area Network)通信协议则是一种用于在车辆内部各个控制模块之间进行高效通信的标准。
本文将针对纯电动车BMS和整车系统之间的CAN通信协议书进行模板的设计,以便更好地实现系统之间的数据交换和协作。
一、协议目的本协议的目的在于规范纯电动车的BMS与整车系统之间的CAN通信方式,并确保两者之间的数据传输准确、可靠,以实现整车系统的高效运行和保证行驶安全。
二、协议范围本协议适用于装配了BMS和整车系统的纯电动车辆。
三、通信协议1. CAN总线参数设置- 位率:根据系统要求设定合适的通信位率。
- 通信模式:采用标准模式(11位标识符)和扩展模式(29位标识符)根据具体需求进行选择。
- 传输层:采用CAN2.0B标准。
- 物理层:采用高速CAN物理层规范。
2. 帧格式- 纯电动车BMS与整车系统之间的CAN通信采用数据帧和远程帧。
- 数据帧分为标准帧和扩展帧,标识符按照具体应用场景进行定义。
3. 数据传输- 数据传输采用帧、命令和回复的方式进行。
- 帧:数据帧中包含需要传输的数据信息。
- 命令:整车系统向BMS发送指令,比如请求电池状态、请求电池温度等。
- 回复:BMS接收到命令后进行处理,并回复整车系统相应数据。
四、通信协议规范1. 标识符分配- 整车系统和BMS应进行标识符的分配,以确保通信双方能够正确识别和解析数据。
2. 命令与数据格式定义- 整车系统发送给BMS的命令应包含命令标识符和数据字段。
- BMS接收到命令后处理并回复数据给整车系统。
3. 错误处理- 在通信过程中,如出现通信错误或数据错误,应有相应的错误处理机制进行处理。
可以采用重传机制或其他错误处理方式。
五、状态转移图- 在整车系统和BMS通信中,可以使用状态转移图来描述不同状态间的转换关系,以及在每个状态下的数据交互过程。
秘级:内部1 整车控制器与 BMS 网络 CAN1 (对外) CAN2.0B 250kbps 1.1 整车控制器整车控制器# 1 :PVCU1 (ID:0x1000EFD0)整车控制器#2:PVCU2 转发机电 1 报文 1MCU_TrqSpd (VCU 发送)整车 控制器PVCU1 仪表指示车速1仪表指示38100ms仪表指示10x1000EFD0制动踏板仪表加速踏板Bit8DCDC 状态Bit7付接触器 吸合 Bit6预充电继 电器吸合 Bit5主接触器 吸合Bit4手制动Bit3 Bit20:空挡 1:后退档 2:前进档 1 3:前进挡 2Bit1Bit8 机电超速 指示 Bit7 机电工作 指示 Bit6 机电过热 指示 Bit5 系统故障 指示Bit4 Ready 指示 Bit3 充电插头 接入指示 Bit2 动力电池 切断指示Bit1 充电指示Bit8 Bit7Bit6CAN2ErrBit5 BreakPad 失效Bit4 ACCPad 失效Bit3 充电请求Bit2 电池故障 指示 Bit1 电池能量 低指示BMSCAN1VCUCAN2MCDSAPU变速器发送频率:1000ms数据长度:8 字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4B SA:0xEFID :0x18ff4BEF字节:1-2 M_Torque1 主机电实际转矩比例0.1 偏移-3200 3-4 M_Speed 机电实际转速比例0.25 偏移-80005-6 母线电压7-8 母线电流整车控制器#3:PVCU3 转发机电报文MCU_Temp (VCU 发送)变速器发送频率:1000ms数据长度:8 字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级: 6参数组号:0xff4c SA:0xEFID :0x18ff4CEF字节: 1 M_Motor_Temperature1 主机电温度比例1 偏移-402 控制器温度3 主逆变器温度:比例1 偏移-40 IGBT 温度4 故障代码5故障代码:" 1 超速报警代码"" 3 欠压报警"" 4 过压报警"" 5 A 相IGBT1 报警"" 6 B 相IGBT3 报警"" 7 C 相IGBT5 报警"" 8 A 相硬件过流保护"" 9 B 相硬件过流保护"" 10 正常"" 12 过电流报警"" 15 旋变错误报警"" 17 A 相电流传感器零票故障"" 18 B 相电流传感器零票故障"" 26 IGBT 温度传感器开路"" 27 温度传感器开路 " " 28 箱体温度传感器开路" " 29 机电温度传感器开路" " 30 IGBT 温度传感器短路" " 31 温度传感器短路" " 32 箱体温度传感器短路" " 33 机电温度传感器短路" " 34 IGBT1 过温" " 36 箱体过温" " 37 机电过温"整车控制器#4:PVCU4 (ID:0x18fff5D0) 没实用??BMSCmd :bit0:1 预充命令bit1:1 正极接触器闭合 bit2:1 负极接触器闭合(需要提供高压电路图来确定逻辑) 1.3 BMS 报文 参见 BMS CAN 协议BMS2: 字节: 3 4 5 6 7 ID :0x 0x14 22 D0 D2最大允许放电电流 单位增益: 2A/bit最大允许充电电流 单位增益: 2A/bit SOC母线电压 母线电流范围: 0-500A/0-FAh 范围: 0-500A/0-FAh2、VCU-MC 网络2 . 1 VCU 发送报文2 .1 . 1 Current 、power 、Pad发送频率: 10ms数据长度: 8 字节 数据页数: 0 协议数据单元格式: 协议数据单元特性: 默认优先级: 0 参数组号: ID:0x1000EFD0字节: 1 机电控制模式命令 bit4:整车请求机电使能 bit7:转矩模式 bit8:调速模式0x18fff5D0BMSCmdBMS/APU整车 控制器控制信息8PVCU4100ms623-4 驱动机电目标转矩 5-6 驱动机电目标转速7 82 .1 .2 Pad/IO 内部检测用VCU 发送频率: 收到标定报文后发送 1000ms 数据长度: 8 字节 数据页数: 0 协议数据单元格式: 协议数据单元特性: 默认优先级: 0 参数组号: ID:0x0CF106D0字节: 1 加速踏板 1AD2 加速踏板 2AD3 制动踏板 1AD4 制动踏板 2AD5 : bit1 :N 档 bit2:D 档 bit4:R 档 bit5:制动有效 6Bit1-3: HU85St0 off ; 1 on ;2 OpenLoad ;3 OverLoad ; Bit4-6: ACCPowerSt0 off ; 1 on ;2 OpenLoad ;3 OverLoad ;7-82.1 .3 Pad/IO 内部检测用VCU 发送频率: 收到标定报文后发送 1000ms 数据长度: 4 字节 数据页数: 0 协议数据单元格式: 协议数据单元特性: 默认优先级: 0 参数组号: ID:0x0CF107D0字节: 1-2 EPROM 值地址3-4 EPROM 存储的值2.2 MC 发送报文 2.2.1 (MC1 发送)发送频率: 500ms数据长度: 8 字节 数据页数: 0 协议数据单元格式: 协议数据单元特性:Bit7 :KeyOn (没用)bit6:加速有效默认优先级:6参数组号:0xff4A SA:0xEFID :0x18ff4AEF字节:1-2 NOP3 位1NOP5-2 Main mode Motor statusBit1 :ReadyBit4 err7-6 Pre_Charge0:close1 :open2:无效3:无效4NOP5NOP6NOP78 MC_Err故障代码:" 1 超速报警代码"" 3 欠压报警"" 4 过压报警"" 5 A 相IGBT1 报警"" 6 B 相IGBT3 报警"" 7 C 相IGBT5 报警"" 8 A 相硬件过流保护"" 9 B 相硬件过流保护"" 10 正常"" 12 过电流报警"" 15 旋变错误报警"" 17 A 相电流传感器零票故障"" 18 B 相电流传感器零票故障"" 26 IGBT 温度传感器开路"" 27 温度传感器开路"" 28 箱体温度传感器开路"" 29 机电温度传感器开路"" 30 IGBT 温度传感器短路"" 31 温度传感器短路"" 32 箱体温度传感器短路"" 33 机电温度传感器短路"" 34 IGBT1 过温"" 36 箱体过温"" 37 机电过温"2.2.2 MCU_TrqSpd (MC2 发送)发送频率:500ms数据长度:8 字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:6参数组号:0xff4B SA:0xEFID :0x18ff4BEF字节:1-2 M_Torque1 主机电实际转矩比例1 偏移-320003-4 M_Speed 机电实际转速比例1 偏移-320005-6 M_DC_Voltage1 机电直流电压比例因子1 偏移0 new7 M_Motor_Temperature1 主机电温度比例1 偏移-408 主逆变器温度:比例1 偏移-402.2.3 MCU_VoltCurrentTemp (MC3 发送)发送频率:500ms数据长度:8 字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:6参数组号:0xff4c SA:0xEFID :0x18ff4CEF字节:1-2 位13- 1 M_DC_Voltage1 机电直流电压比例因子1 偏移0 3-4 位13- 1 M_DC_Current 机电直流电流比例1 偏移-400 (无)562 .3 标定报文内部用发送频率:100ms数据长度: 1 字节数据页数:0协议数据单元格式:协议数据单元特性:默认优先级:0参数组号:ID: 0x1800d029字节: 1 Bit1:标定当前ACCPad 的AD 值为MAXBit2:标定当前ACCPad 的AD 值为MinBit3:标定当前BreakPad 的AD 值为MAXBit4:标定当前BreakPad 的AD 值为MinBit7:写EPROM 信息Bit8:读取EPROM 储存的值2-3 读取/写入EPROM 值的地址 (仅仅用到了byte2)4-5 写入数据7-8 NopTmaxT额定n4 n1 n2 n3 n5 n6n(r/s) 地址存储的数据(低地址存放高字节)0x0000 ACCPad 最大AD 值0x0001 ACCPad 最小AD 值0x0002 BreakPad 最大AD 值0x0003 BreakPad 最小AD 值0x0004 驱动机电最大转速0x0005 驱动机电最大转矩Tmax0x0006 额定转矩T0x0007 制动最小转速n10x0008 加速最小转速n20x0009 转矩拐点转速n30x000a 机电最大功率0x000b 机电额定功率0x000c 电池最大放电功率0x000d 电池最大充电功率0x000e 取销电制动最小转速n40x000f 最大限速转速n50x0010 最大限速转速n6线束护套 1393450- 1(52pin 插孔)、1393454-6(52pin 插孔护板)、1393436- 1 (28pin 插孔)、1393454- 1 (28pin 插孔护板)控制器插件: AMP1743275 线径选用 1.0mm 2定义ON 开关 (高有 效,输入) 倒档(高有效, 输入) 空压机使能(低 有效, 预充完成 后) 蓄电池正 机电水泵(低有 效,根据温度)制 动 踏 板 信 号 2 定义蓄电池负前进档 (高有效信号,输入) 制冷允许备用 (低有效信号, 输入) CAN1L (接整车 仪表、 BMS 网 络)制 动 有 效 开 关 ( 高 有 效 , 输 入) 定义制 动 踏 板 信 号 1 加 速 踏 板 信 号 2(摹拟信 号采集)CAN2H( 动 力 CAN) CAN1H( 信 息CAN)传感器电 源 2(5V 输出)定义空挡 ( 高 有效,输入)蓄电池负蓄电池正备用( 24V 输 出)序 号 4142434445 4647 4849 5051 序号1 234 567 8 9 1011 序 号 61626364 65666768697071序 号 21222324 2526 27 28 29 30311213 14 15161718 手制动信号蓄电池负(接真 空传感器地)加速踏板信号 1(摹拟信号采 集) 3233 34 35 3637 38CAN2L (动力)DCDC 使 能 (24V 输出) Start 信 号 (高有效)传感器 电源 1 (5V 输出)蓄电池负 (油门踏板传感器地)备注:表格空白处为豫备接口,具体详见方案525354 555657585960蓄电池负空 调 使 能(24V 输出, 预充完成后) 727374 757677787980加速有效开关(低有效,输 入)蓄电池正402039 19功能制冷机电水箱散热工作机电冷却水泵工作机电水箱散热住手工作机电冷却水泵住手工作倒车灯高压负极接触器闭合(除电机外)高压正极接触器闭合(机电) 输入开关等条件低压供电正常高压闭合Von制冷开关闭合,且制热开关断开动力电池SOC>20低压供电正常高压闭合Von机电冷却液温度>55 或者机电控制器掉线或者机电控制器温度>45低压供电正常高压闭合Von机电控制器温度>40或者机电控制器掉线或者机电温度>50Von关闭或者机电冷却液温度<=53且电机控制器温度<=43Von关闭或者机电控制器温度<=38且机电温度<=48低压供电正常高压闭合倒车开关闭合低压供电正常电池管理系统正常整车控制器正常并判断KeyOn 或者充电请求低压供电正常Start开关点动信号KeyOn充电插头没有接入高压负极接触器闭合执行器由空调控制器完成(增加功能)(增加功能)(增加功能)(增加功能)(增加功能)信号整车控制器发出电池管理系统控制信号整车控制器发出电池管理系统控制高压接触器闭软件变量制冷优先与制热修改通信协议 ( 交大)修改通信协议 ( 交大)其他高压正极接触器断开(机电)高压负极接触器断开(除电机外)预充电接触器闭合预充电接触器断开前进后退车辆禁止运行N档电机电压与动力电池电压相当低压供电正常KeyOn断开或者充电插头接入或者高压负极接触器断开低压供电正常KeyOn断开延迟20s且电流<10A充电插头没有接入低压供电正常Start开关点动信号KeyOn充电插头没有接入高压负极接触器闭合N档低压供电正常KeyOn断开或者充电插头接入或者高压负极接触器断开或者电机电压与动力电池电压相当低压供电正常高压闭合正常前进档闭合加速踏板>0加速信号有效动力电池SOC>10动力电池温度正常单体电池电压正常低压供电正常高压闭合正常倒车挡闭合加速踏板>0加速信号有效动力电池SOC>10动力电池温度正常单体电池电压正常低压供电正常合仪表指示信号整车控制器发出电池管理系统控制高压正极接触器断开仪表指示信号整车控制器发出电池管理系统控制高压负极接触器断开给机电发送前进信号仪表显示给机电发送前进信号仪表显示禁止机电运行由后退改为前进,需要车速==0,踏板信号=0由前进改为后退,需要车速==0, 踏板信号=0快速充电慢速充电发送仪表指示Ready发送仪表报警指示发送仪表声音报警DC/DC 工作使能动力电池SOC<10或者动力电池温度过高或者充电插头接入或者DC/DC故障或者加速踏板故障或者真空度<100KPa??或者上装工作低压供电正常充电插头接入高压负极接触器闭合低压供电正常车载充机电给信号高压负极接触器闭合低压供电正常高压闭合KeyOnDCDC工作正常动力系统通信正常 (整车控制器、机电控制器、电池管理系统)充电插头没有插入电池系统正常驱动机电系统正常系统在前进或者后退挡低压供电正常或者高压闭合DCDC故障或者整车控制器故障或者机电系统故障或者电池系统故障低压供电正常高压闭合DCDC故障或者电池SOC<10或者系统Ready条件下,门开低压供电正常KeyOn或者充电请求仪表显示Stop??禁止机电运行,仪表指示禁止机电运行,仪表指示与慢充优先问题,讨论通信协议与慢充优先问题,修改通信协议 ( 交大)仪表指示仪表指示仪表声音报警。
bms主控与从控通讯协议BMS主控与从控通讯协议随着电动汽车的普及和发展,电动汽车的电池管理系统(Battery Management System,简称BMS)也变得越来越重要。
BMS主控与从控通讯协议是BMS系统中的关键部分,它负责主控与从控之间的数据传输和通信。
BMS主控与从控通讯协议的作用是确保主控和从控之间可以稳定、高效地交换信息。
主控是BMS系统的核心,负责对电池组的监测、管理和控制,而从控则是主控下属的一些辅助模块,用于采集电池组的状态参数和执行主控的指令。
主控与从控之间的通信协议必须能够满足高速、可靠、实时的要求,以确保BMS系统的正常工作。
在BMS系统中,主控和从控之间的通信可以通过有线或无线方式实现。
有线通信通常使用CAN(Controller Area Network)总线协议,这是一种广泛应用于汽车电子系统中的通信协议。
CAN总线协议具有高速、可靠、抗干扰等特点,非常适合用于BMS系统中主控与从控之间的通信。
通过CAN总线,主控可以向从控发送指令,并获取从控采集的电池组状态信息,如电压、电流、温度等。
除了有线通信外,BMS系统还可以采用无线通信方式进行主控与从控之间的数据传输。
常用的无线通信协议有蓝牙、Wi-Fi和Zigbee 等。
蓝牙通信适用于短距离通信,可以实现主控与从控之间的实时数据传输和控制。
Wi-Fi通信具有较大的覆盖范围,可以用于主控与从控之间的数据传输和远程监控。
Zigbee通信适用于低功耗、低速率的无线传感器网络,可以用于从控之间的数据采集和传输。
无论是有线通信还是无线通信,BMS主控与从控通讯协议必须具备以下特点:1. 实时性:BMS系统对电池组的监测和控制要求实时性高,通讯协议必须能够保证数据的及时传输和响应。
2. 可靠性:BMS系统对电池组的安全和可靠性要求较高,通讯协议必须具备数据校验和容错机制,以确保数据的准确性和完整性。
3. 灵活性:BMS系统的功能和性能可能会随着电动汽车的使用场景和需求而变化,通讯协议必须能够支持灵活的配置和扩展。
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1、00)版本记录版本制作者日期说明V1、00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System,以下简称BMS)与电机控制器(Vehicle Control Unit,简称VCU)、智能充电机(Intelligent Charger Unit,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统与充电系统的数据交换。
本标准的CAN标识符为29位,通信波特率为250kbps。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用就是必不可少的。
凡就是注日期的版本适用于本文件。
凡不就是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆控制器局域网络第1部分:数据链路层与物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling)、SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议第11部分:物理层,250Kbps,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair)、SAE J1939-21:2006商用车控制系统局域网络(CAN)通信协议第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer)、3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
可编写可改正秘级:内部纯电动汽车动力总成系统网络总线通信协议五、通信协议BMS DSCAN1VCU APUCAN2MC1 整车控制器与BMS网络 CAN1(对外)250kbps整车控制器整车控制器#1:PVCU1 (ID:0x1000EFD0 )发送节点报文代码报文描绘优先级数据字节刷新速率11位 ID目标节点整车PVCU118100ms0x1000EFD0控制器仪表指示仪表Byte8Byte7Byte6Byte5Byte4Byte3Byte2Byte1仪表指示仪表指示仪表指示车速321制动踏板加快踏板Byte3 :仪表指示1Bit8Bit7Bit6Bit5Bit4Bit3Bit2Bit10:空挡DCDC状态付接触器预充电继主接触器手制动1:退后档2:行进档 1吸合电器吸合吸合3:行进挡 2Byte4 :仪表指示2Bit8Bit7Bit6Bit5Bit4Bit3Bit2Bit1电机超速电机工作电机过热系统故障Ready 指充电插头动力电池充电指示3第3页共18页指示指示指示指示示接入指示切断指示Byte5 :仪表指示 3Bit8Bit7Bit6Bit5Bit4Bit3Bit2Bit1CAN2Err BreakPad ACCPad失充电恳求电池故障电池能量无效效指示低指示整车控制器#2:PVCU2 转发电机 1 报文 1MCU_TrqSpd (VCU发送 )变速器发送频次:1000ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:6参数组号:0xff4B SA:0xEFID : 0x18ff4BEF字节:1-2 M_Torque1主电机实质转矩比率偏移-3200 3-4M_Speed电机实质转速比率偏移-80005-6母线电压7-8母线电流整车控制器#3:PVCU3 转发电机报文MCU_Temp (VCU发送 )变速器发送频次:1000ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:6参数组号:0xff4c SA:0xEFID : 0x18ff4CEF字节:1M_Motor_Temperature1主电机温度比率1偏移-40 2控制器温度4第4页共18页3主逆变器温度:比率 1 偏移 -40 IGBT温度4故障代码5故障代码:" 1超速报警代码 "" 3欠压报警 "" 4过压报警 "" 5 A 相 IGBT1 报警 "" 6 B 相 IGBT3 报警 "" 7 C 相 IGBT5 报警 "" 8 A 相硬件过流保护"" 9 B 相硬件过流保护 "" 10正常"" 12过电流报警 "" 15旋变错误报警 "" 17 A 相电流传感器零票故障"" 18 B 相电流传感器零票故障"" 26IGBT 温度传感器开路 "" 27温度传感器开路"" 28箱体温度传感器开路"" 29电机温度传感器开路"" 30IGBT 温度传感器短路 "" 31温度传感器短路 "" 32箱体温度传感器短路"" 33电机温度传感器短路"" 34IGBT1 过温 "" 36箱体过温 "" 37电机过温 "整车控制器#4:PVCU4( ID:0x18fff5D0)没实用发送节点报文代码报文描绘优先级数据字节刷新速率11位 ID目标节点整车控制信息PVCU468100ms0x18fff5D0BMS/APU 控制器Byte8Byte7Byte6Byte5Byte4Byte3Byte2Byte15第5页共18页可编写可改正BMSCmdBMSCmd:bit0:1预充命令bit1:1正极接触器闭合bit2:1负极接触器闭合(需要供给高压电路图来确立逻辑)BMS报文拜见BMS CAN协议BMS2: ID : 0x0x14 22 D0 D2字节: 3最大同意放电电流单位增益:2A/bit范围:0-500A/0-FAh4最大同意充电电流单位增益:2A/bit范围:0-500A/0-FAh5SOC6母线电压7母线电流2、 VCU-MC网络2.1VCU发送报文2.1 . 1Current 、 power、Pad发送频次:10ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:0参数组号:ID:0x1000EFD0字节:1电机控制模式命令bit4:整车恳求电机使能bit7:转矩模式bit8:调速模式23-4驱动电机目标转矩5-6驱动电机目标转速78可编写可改正2.1 .2 Pad/IO内部检测用VCU发送频次:收到标定报文后发送1000 ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:0参数组号:ID:0x0CF106D0字节:1加快踏板1AD2加快踏板2AD3制动踏板1AD4制动踏板2AD5: bit1: N 档 bit2 : D档 bit4:R档 bit5:制动有效 bit6:加快有效Bit7: KeyOn(没用)6Bit1-3:HU85St0 off;1 on ;2OpenLoad ;3OverLoad ;Bit4-6:ACCPowerSt0off;1on;2OpenLoad ;3OverLoad ;7-82.1 .3 Pad/IO内部检测用VCU发送频次:收到标定报文后发送1000ms数据长度:4字节数据页数:0协议数据单元格式:可编写可改正协议数据单元特征:默认优先级:0参数组号:ID:0x0CF107D0字节:1-2 EPROM值地点3-4EPROM储存的值MC发送报文2.2.1 (MC1发送)发送频次:500ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:6参数组号:0xff4A SA:0xEFID : 0x18ff4AEF字节:1-2NOP3位1NOP5-2 Main mode Motor statusBit1: ReadyBit4 err7-6 Pre_Charge0:close1:open2:无效3:无效4NOP5NOP6NOP7可编写可改正8 MC_Err故障代码:" 1超速报警代码 "" 3欠压报警 "" 4过压报警 "" 5 A 相 IGBT1 报警 "" 6 B 相 IGBT3 报警 "" 7 C 相 IGBT5 报警 "" 8 A 相硬件过流保护"" 9 B 相硬件过流保护 "" 10正常"" 12过电流报警 "" 15旋变错误报警 "" 17 A 相电流传感器零票故障"" 18 B 相电流传感器零票故障"" 26IGBT 温度传感器开路 "" 27温度传感器开路"" 28箱体温度传感器开路"" 29电机温度传感器开路"" 30IGBT 温度传感器短路 "" 31温度传感器短路 "" 32箱体温度传感器短路"" 33电机温度传感器短路"" 34IGBT1 过温 "" 36箱体过温 "" 37电机过温 "2.2.2 MCU_TrqSpd (MC2发送)发送频次:500ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:6可编写可改正参数组号:0xff4B SA:0xEFID : 0x18ff4BEF字节:1-2 M_Torque1主电机实质转矩比率1偏移-320003-4M_Speed电机实质转速比率1偏移-320005-6 M_DC_Voltage1电机直流电压比率因子 1 偏移 0new7 M_Motor_Temperature1主电机温度比率1偏移-408主逆变器温度:比率 1 偏移 -402.2.3 MCU_VoltCurrentTemp (MC3发送)发送频次:500ms数据长度:8字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:6参数组号:0xff4c SA: 0xEFID : 0x18ff4CEF字节: 1-2位 13-1M_DC_Voltage1电机直流电压比率因子 1 偏移 03-4位 13-1M_DC_Current电机直流电流比率 1 偏移 -400(无)562.3标定报文内部用发送频次:100 ms数据长度:1字节数据页数:0协议数据单元格式:协议数据单元特征:默认优先级:0可编写可改正ID: 0x1800d029字节:1Bit1:标定目前ACCPad的 AD值为 MAXBit2:标定目前ACCPad的 AD值为 MinBit3:标定目前BreakPad 的 AD值为 MAXBit4:标定目前BreakPad 的 AD值为 MinBit7:写 EPROM信息Bit8:读取 EPROM储藏的值2-3读取/写入EPROM值的地点(只是用到了byte2 )4-5写入数据7-8Nop制动过程Tmax加快过程T额定n4 n1 n2n3n5n6n(r/s)AT24C256储存芯片中储存数据的定义地点储存的数据(低地点寄存高字节)0x0000ACCPad最大 AD值0x0001ACCPad最小 AD值0x0002BreakPad 最大 AD值0x0003BreakPad 最小 AD值0x0004驱动电机最大转速0x0005驱动电机最大转矩 Tmax可编写可改正0x0006额定转矩 T0x0007制动最小转速 n10x0008加快最小转速 n20x0009转矩拐点转速 n30x000a电机最大功率0x000b电机额定功率0x000c电池最大放电功率0x000d电池最大充电功率0x000e撤消电制动最小转速 n40x000f最大限速转速 n50x0010最大限速转速 n6六. 插件信号定义线束护套 1393450-1( 52pin 插孔)、1393454-6( 52pin 插孔护板)、1393436-1( 28pin 插孔)、1393454-1(28pin 插孔护板)2控制器插件:AMP1743275线径采用序序序序定义定义定义定义号号号号1 蓄电池负214161可编写可改正制动踏板信2224262号 1加快踏板信32343号 2( 模拟信号收集 )424ON开关(高有44效,输入 )5行进档(高有效25倒档(高有效,45信号,输入)输入)制冷同意备用空压机使能(低6(低有效信号,26有效,预充达成46CAN2H(动力输入)后)CAN)72747CAN1H( 信息CAN)蓄电池正828电机水泵(低有48效,依据温度)9CAN1L(接整车2949仪表、BMS网络)103050制动有效开关63空挡(高有64效,输入)65蓄电池负66蓄电池正676869备用( 24V 输70出)11(高有效,输31制动踏板信51传感器电源2 71入)号 2( 5V 输出)12手制动信号32527213蓄电池负(接真335373空传感器地)蓄电池负143454741535CAN2L(动力)5575DCDC使能( 24V加快有效开关16365676输出)(低有效,输可编写可改正入)加快踏板信号171( 模拟信号采37Start 信号5777集 )(高有效)18385878空调使能1939传感器电源 159(24V 输出,79( 5V 输出)预充达成后)2040蓄电池负(油门6080踏板传感器地)蓄电池正备注:表格空白处为预备接口,详细详见方案可编写可改正软件功能输入开关等条件履行器其余变量低压供电正常高压闭合制冷优先Von由空调控制器完制冷制冷开封闭合,且制热与成开关断开制热动力电池 SOC>20低压供电正常高压闭合电机水箱散热Von(增添功能)工作电机冷却液温度>55或电机控制器掉线或电机控制器温度 >45低压供电正常高压闭合电机冷却水泵Von(增添功能)工作电机控制器温度>40或电机控制器掉线或电机温度 >50Von封闭电机水箱散热或(增添功能)停止工作电机冷却液温度<=53且电机控制器温度可编写可改正<=43Von封闭电机冷却水泵或(增添功能)停止工作电机控制器温度<=38且电机温度 <=48低压供电正常倒车灯高压闭合(增添功能)倒车开封闭合低压供电正常信号整车控制器高压负极接触电池管理系统正常改正通信发出器闭合(除电整车控制器正常并判协议(交电池管理系统控机外)断大)KeyOn 或充电恳求制低压供电正常Start 开关点动信号信号整车控制器KeyOn发出改正通信高压正极接触充电插头没有接入电池管理系统控协议(交器闭合(电机)高压负极接触器闭合制高压接触器闭N档大)合电机电压与动力电池仪表指示电压相当低压供电正常信号整车控制器发出KeyOn断开高压正极接触电池管理系统控或充电插头接入器断开(电机)制高压正极接触或高压负极接触器断器断开开仪表指示低压供电正常高压负极接触KeyOn断开延缓 20s 器断开(除电且电流 <10A机外)充电插头没有接入低压供电正常Start 开关点动信号预充电接触器KeyOn闭合充电插头没有接入高压负极接触器闭合N档低压供电正常KeyOn断开预充电接触器或充电插头接入或高压负极接触器断断开开或电机电压与动力电池电压相当低压供电正常高压闭合正常行进档闭合行进加快踏板 >0加快信号有效动力电池 SOC>10动力电池温度正常单体电池电压正常退后低压供电正常可编写可改正信号整车控制器发出电池管理系统控制高压负极接触器断开由退后改给电机发送行进为行进,信号需要车速仪表显示==0,踏板信号 =0给电机发送行进由行进改v1.0 可编写可改正高压闭合正常信号为退后,倒车挡闭合仪表显示需要车速加快踏板 >0==0, 踏加快信号有效板信号 =0动力电池 SOC>10动力电池温度正常单体电池电压正常低压供电正常动力电池 SOC<10或动力电池温度过高车辆严禁运转或充电插头接入严禁电机运转或DC/DC故障仪表显示 Stop或加快踏板故障或真空度 <100KPa或上装工作低压供电正常与慢充优严禁电机运转,先问题,迅速充电充电插头接入仪表指示议论通信高压负极接触器闭合协议与慢充优低压供电正常严禁电机运转,先问题,慢速充电车载充电机给信号改正通信高压负极接触器闭合仪表指示协议(交大)发送仪表指示低压供电正常Ready高压闭合仪表指示KeyOn可编写可改正DCDC工作正常动力系统通信正常(整车控制器、电机控制器、电池管理系统)充电插头没有插入电池系统正常驱动电机系统正常系统在行进或退后挡低压供电正常或高压闭合 DCDC故障发送仪表报警或整车控制器故障仪表指示指示或电机系统故障或电池系统故障低压供电正常高压闭合 DCDC故障发送仪表声音或电池 SOC<10仪表声音报警报警或系统 Ready条件下,门开低压供电正常DC/DC工作使KeyOn能或充电恳求。
BMS 通信协议BMS 与上位机采用通用异步串行总线RS232 通信标准进行通信,波特率为19200bps,8 位数据位,1 位停止位,无奇偶校验,无流控制。
上位机通过发送相应指令即可查询电池组的工作状态,包括电池组各电池电压、电流、温度、SOC、循环寿命、当前状态等信息。
具体指令说明如下:查询指令0xa8 0x85 0x00 0x00 0x00 0x00 0x00 0x13当上位机发送上述查询指令后,BMS 将返回电池组所有信息,返回的数据共86bytes 的数据。
按先后顺序编号为1~90 。
Data Byte1 Byte2 Byte3 …… Byte88 Byte89 Byte90ID 1 2 3 88 89 90数据同步字段ID1、ID2 为数据同步字段,用于上位机对齐数据,ID1、ID2 固定为十六进制数据0xa8 0x85。
电池组当前工作状态ID3 表示当前电池组工作状态,该8 位数据的各位定义如下表Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7 Bit 8OT OV UV OC CHG DCHGBit 1 为最低位,Bit 8 为最高位。
上表中响应位被置1,则表示相应的状态发生。
各参数定义如下:OT: 过温保护状态OV: 过压保护状态UV: 欠压保护状态OC: 过流保护状态CHG:正在充电DCHG: 正在放电温度信息ID4,ID5,ID6 表示温度信息,其中ID4 为符号位,如果为1,则表示温度为负,否则为正,ID5 表示温度的整数部分,ID6 表示小数部分。
例如:ID4 为0x01,ID5 为0x1c,ID6 为0x19,则表示温度为-28.25 摄氏度。
各电池电压信息ID7~ID20 表示7 串电池的电压信息。
ID7~ID8 组成一个无符号16 位的数据,表示第一节电池电压信息。
例如:ID7=0x8c,ID8=0xa0,则该节电池电压为0x8ca0=36000,表示3600.0mV。
标题:汽车ECU BMS通信协议标准
一、概述
随着汽车电子系统的不断发展和智能化水平的提高,汽车的ECU(汽车电子控制单元)和BMS(电池管理系统)之间的通信协议变得越来越重要。
通信协议标准的统一对于汽车电子系统的互操作性和稳定性至关重要。
本文将重点探讨汽车ECU和BMS之间的通信协议标准。
二、汽车ECU和BMS的通信协议标准
1. CAN总线通信协议
CAN(Controller Area Network)总线是一种广泛应用于汽车电子系统中的通信协议。
它具有高速传输、抗干扰能力强等优点,在汽车ECU和BMS之间的通信中得到了广泛应用。
2. LIN总线通信协议
LIN(Local Interconnect Network)总线是一种针对汽车电子系统中从属设备之间通信的低成本、低速率的总线标准。
在汽车BMS和部分低带宽要求的ECU之间的通信中,LIN总线也得到了应用。
3. FlexRay通信协议
FlexRay是一种高速、冗余的汽车网络协议,它被设计用于替代现有的汽车通信标准,提供更高的数据传输速率和实时性能。
在某些高性能汽车和BMS之间的通信中,FlexRay也得到了应用。
三、通信协议标准的选择和应用
1. 根据汽车电子系统的要求,选择合适的通信协议标准,考虑到数据
传输速率、实时性能、抗干扰能力等因素。
2. 对于不同的汽车电子系统,选择不同的通信协议标准,以确保各个
子系统之间的通信稳定和可靠。
3. 根据通信协议标准的应用场景和技术要求,对汽车ECU和BMS之
间的通信协议进行定制化设计和开发,以满足具体需求。
四、未来发展趋势
1. 随着汽车电子系统的不断发展和智能化水平的提高,汽车的ECU和BMS之间的通信协议标准将会不断进化和完善。
2. 在未来,通信协议标准的选择和应用将更加智能化和个性化,以满
足汽车电子系统对数据传输速率、实时性能和稳定性的不断提升的需求。
3. 通信协议标准的开放性和统一性将会更加重要,以促进不同厂商的
汽车电子系统之间的互操作和兼容性。
五、结论
汽车ECU和BMS之间的通信协议标准是汽车电子系统中的重要组成
部分,通信协议标准的选择和应用直接影响着汽车电子系统的性能和
稳定性。
我们需要不断关注和研究通信协议标准的发展趋势,推动通
信协议标准的进步和完善,以确保汽车电子系统的安全可靠运行。
六、汽车ECU和BMS通信协议标准的挑战与解决方案
1. 挑战:随着汽车电子系统的复杂度不断增加,ECU和BMS之间的
通信协议标准需要具备更高的可靠性和稳定性,以应对各种复杂的工作环境和运行条件。
解决方案:针对通信协议标准的挑战,汽车行业需要加强标准化组织和产业联盟的合作,推动通信协议标准的进一步优化和标准化,以提高通信协议的稳定性和可靠性。
2. 挑战:汽车电子系统中的安全性需求不断提升,ECU和BMS之间的通信协议标准需要具备更高的安全性和防护能力,以抵御各种网络安全攻击和威胁。
解决方案:在通信协议标准的设计和开发中,加强对通信安全性的考虑和规划,引入加密算法和安全认证机制,以保障汽车电子系统中的通信数据安全性。
3. 挑战:日益增长的汽车电子功能和互联互通需求对通信协议标准的扩展性和灵活性提出了更高的要求,以满足各种新兴应用和场景的需求。
解决方案:在通信协议标准的设计和制定中,应注重通信协议的灵活性和可扩展性,支持对新功能和新应用的快速部署和适配,以满足汽车电子系统中不断增长的功能需求。
七、汽车ECU和BMS通信协议标准的国际标准化和合作
1. 随着汽车行业的全球化发展,汽车ECU和BMS通信协议标准的国际标准化和合作显得尤为重要。
跨国汽车制造商和汽车电子系统供应商需要遵循统一的国际标准和规范,以确保不同国家和地区的汽车电子系统能够互操作和兼容。
2. 各个国家和地区的汽车行业组织和标准化机构应加强合作,推动汽
车ECU和BMS通信协议标准的国际标准化进程,共同制定适用于全
球范围的通信协议标准,以推动全球汽车电子系统的互通和互操作。
3. 各国政府和监管机构也应加强对汽车ECU和BMS通信协议标准的
管理和监督,制定相关政策和法规,推动行业内各方共同遵循统一的
通信协议标准,以促进全球汽车电子系统的发展和合作。
八、未来发展趋势
1. 智能化和互联互通是未来汽车电子系统发展的重要趋势。
汽车ECU
和BMS通信协议标准将更加智能化,支持各种智能汽车功能和新型应用的快速部署和适配。
2. 通信协议标准将朝着更高的数据传输速率和实时性能发展,以满足
日益增长的汽车电子系统对数据通信的需求,支持更多的车联网和智
能驾驶应用。
3. 通信协议标准的开放性和统一性将会更加重要,以促进不同厂商的
汽车电子系统之间的互操作和兼容性,支持汽车行业的开放合作和共
赢发展。
九、结论
随着汽车电子系统的不断发展和智能化水平的提高,汽车ECU和
BMS之间的通信协议标准将会不断进化和完善。
通信协议标准的选择和应用将更加智能化和个性化,以满足汽车电子系统对数据传输速率、实时性能和稳定性的不断提升的需求。
汽车ECU和BMS通信协议标
准的国际标准化和合作也是未来的重要发展方向,需要汽车行业和标准化机构共同努力促进。
汽车ECU和BMS通信协议标准的发展将不断推动汽车电子系统的进步和完善,为汽车行业的可持续发展和智能化转型提供更强有力的支持。
以上是关于汽车ECU BMS通信协议标准的相关内容,希望对您有所帮助。