H ( ) Z 1 ( ) ( K 2 M )1 , r
def
u H ( ) f
其中 H ( ) 正是系统的位移频响函数矩阵,它的元素 H ij ( ) 具有柔度系数的量纲, 反映了在系统第j个自由度上施加单位正弦激励后第i个自由度的稳态位移响应幅值。
(2)频响函数矩阵的模态展开式 利用固有振型关于质量矩阵和刚度矩阵的加权正交性,对式动刚度矩阵左乘 和右乘
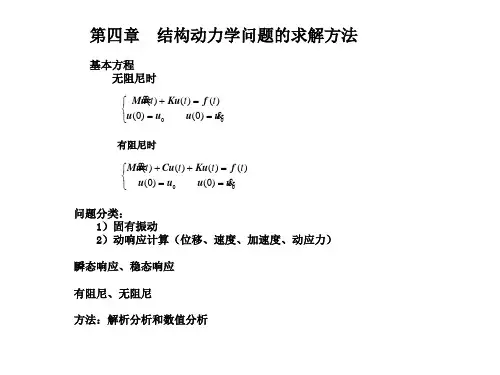
4.1 无阻尼自由振动
Mu(t ) Ku(t ) 0 u(0) u0 , u(0) u0
特性: 质量矩阵 1)反映系统的动能
T
1 T u Mu 0 2
1 T u Mu 0 2
2)正定 但也有例外:存在纯静态模态
u ,使
(针对两种情况:当采用集中质量矩阵时和当离散系统中设有无质量点的自由度时)
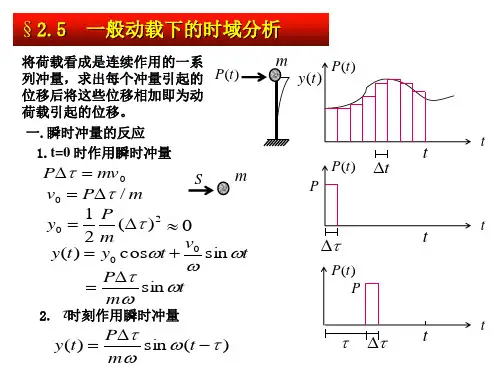
根据前面的分析,线性系统的响应可分为零初始状态下激励引起的响应及零 激励条件下初始条件引起的响应,即零状态响应及零输入响应。系统的响应可以 是其中某一种或两种之线性组合。研究下述微分方程的求解问题
Mu(t ) Ku(t ) f (t ) u(0) 0 u(0) 0,
Φ{diag [cos r t ]a diag [sin
1 r N
1 r N
r
t ]b}
其中
a [a1 aN ] ,
T def
b [b1 bN ]T
def
对于给定的初始条件
u0
和
u0
,可得到
u0 Φa ,
解出参数向量
u0 Φ diag[ r ]b
0 0
t
t
当考虑进系统初始状态对响应的贡献时,系统的响应为