载荷约束Workbench14静力学
- 格式:pdf
- 大小:2.01 MB
- 文档页数:49
如何简单的区分ANSYS Workbench 有限元分析中的静力学与动力学问题四川 曹文强“力”是一个很神秘的字,是个象形字,形体极像古代的犁形,上部为犁把,下部为耕地的犁头,也形象的解释“力”含义 ,将无形不可见,不可描述的现象充分的表达了出来。
从初中物理我们就学习过,力是物体之间的相互作用,是使物体获得加速度和发生形变的外因,单独就力而言,有三个要素力的大小、方向和作用点。
力学是研究物体的机械运动和平衡规律及其应用的,力学可分为静力学、运动学和动力学三部分。
而今天主要是简单介绍一个静力学与动力学。
首先,静力学与动力学区别是什么?答案很简单,一个是“静”,一个是“动”,动静的含义就是时间的问题。
故,静力学实际是在研究工程结构在静载荷作用下的弹塑性变形和应力状态,以及结构优化问题,其中的静载荷是指不随时间变化的外加载荷,变化较慢的载荷,也可近似地看作静载荷。
当然“静”动力学静力学实际上只是相对而言,严格地说,物体相对于惯性参照系处于静止或作匀速直线运动的状态,即加速度为零的状态,也就是平衡的状态。
对于平衡的状态阐述,牛顿第一运动定律(牛顿第一定律,又称惯性定律、惰性定律)就有一个完整表述:任何物体都要保持匀速直线运动或静止状态,直到外力迫使它改变运动状态为止。
此外,静力学的有五大公理公理一力的平行四边形法则:作用在物体上同一点的两个力,可合成一个合力,合力的作用点仍在该点,其大小和方向由以此两力为边构成的平行四边形的对角线确定,即合力等于分力的矢量和。
公理二二力平衡公理:作用在物体上的两个力,使物体平衡的必要和充分条件是:两个力的大小相等,方向相反,作用线沿同一直线。
公理三加减平衡力系公理:在已知力系上加或减去任意平衡力系,并不改变原力系对刚体的作用。
公理四牛顿第三定律:两物体间的相互作用力,大小相等,方向相反,作用线沿同一直线。
此公理概括了物体间相互作用的关系,表明作用力与反作用力成对出现,并分别作用在不同的物体上。

Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。

![Moment载荷_ANSYS Workbench有限元分析实例详解(静力学)_[共7页]](https://uimg.taocdn.com/047c56bf7e21af45b207a816.webp)
– 213 –
思考题
远程力的行为设置除了有Deformable (柔性)、Rigid (刚性),还有Coupled (耦合)。
Coupled (耦合)表示载荷作用区域内的所有节点具有同样的自由度变形,与经典界面的CP 命令相同。
读者可以自行建模,对比分析结果,并参见4.7.3节的思考题,理解其中的意义。
4.5.3 Moment 载荷
由于实体单元仅有三个方向的平动自由度,没有转动自由度,所以3D 实体模型加载Moment 也是基于远程点边界条件,即先建立一个远程点,远程点与Moment 作用面耦合,实际Moment 就加载在远程点上。
下面以一个例子说明Moment 载荷加载分析。
1.建立模型
在XYPlane 下新建一Sketch1,基本图形与参数如图4-5-46所示。
图4-5-46 Sketch1设置
Revolve (旋转)建模,如图4-5-47所示。
2.划分网格
对于这类空心回转类零件,一般采用MultiZone (多域)划分网格。
如图4-5-48所示,右键点击Mesh →Insert →Method ,其中Geometry 点选整个实体,Method 选择MultiZone ,Mapped Mesh Type 选择Hexa ,Free Mesh Type 选择Hexa Core 。
– 214 – 图4-5-47 模型设置
图4-5-48 MultiZone设置最终有限元模型见图4-5-49。
目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > Control Panel >Miscellaneous > Angular V elocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。

大连理工大学研究生院网络学刊NETWORK JOURNAL OF GRADUATE SCHOOL OF DUT基于WORKBENCH的重型板式给料机结构静力学与模态分析沈庆杰(大连理工大学机械工程学院,辽宁大连 116024)摘要:本文基于有限元方法,利用ANSYS/WORKBENCH软件对重型板式给料机结构进行静力学与模态分析。
得到了给料机主体钢结构的应力、变形以及前6阶固有频率和振型,可为进一步的结构优化和轻量化设计提供理论依据,具有一定的实际工程意义。
关键词:重型板式给料机;有限元;静力分析;模态分析;ANSYS/WORKBENCH中图分类号:TH228 文献标识码:A0 引言作为典型物流设备的重型板式给料机应用于矿山行业,主要承担运输作业,主体钢结构作为重型板式给料机的承载和支撑部件,其强度、弹性变形和动态特性直接影响设备的可靠性。
钢结构性能研究是一项非常繁琐的过程,其结构复杂、原件集合尺寸差异大,单纯的经验设计难以保证结构的可靠性,潜伏问题难以发现,因而传统的设计已经不能完全满足设计的需求。
随着计算机软件的不断开发,现代重要的结构设计大都采用弹性力学有限元法,使设计水平得到显著的提高[1]。
本文以某企业自移式破碎站的重型板式给料机主体钢结构为研究对象,对其进行静力与模态分析,对验证给料机主体钢结构强度和刚度要求;推断未测或难测部位的应力和变形状态;找出结构的薄弱环节并改进具有重要的理论参考和实践意义。
1有限元模型的建立本文研究的重型板式给料机主要承受两种工况:一种工况为给料机负载平稳运输物料且没有落料冲击链板;另一种工况为给料机在运输物料过程中落料冲击链板。
本文主要对第一种工况下的重型板式给料机主体钢结构进行静力学分析以及模态分析。
1.1三维模型的建立三维模型的建立是数值模拟分析中重要、关键的环节。
UG软件能够方便地建立复杂的三维模型,企业提供的初始的板式给料机三维模型主体钢结构是由不同厚度的钢板焊接而成,模型钢板之间存在较多的焊缝,导致模型存在不同大小的间隙,给后继有限元分析带来困难,而且模型结构复杂,且为三维实体,建立有限元模型的过程中,要在符合结构力学特性的前提下建立模型,有必要对结构做合理的简化。
![Beam单元实例运用_ANSYS Workbench有限元分析实例详解(静力学)_[共14页]](https://uimg.taocdn.com/12d9cb7dd1f34693dbef3e0b.webp)
– 80 –(5)其余不变,结果如图4-2-23所示。
图4-2-23 计算结果结果评估:① 前一个模型左右角几乎为90°,梁之间为焊接。
② 后一个模型左角约为90°,右角明显小于90°。
③ 对比Total Shear Force 、Total Bending Moment 、Total Displacement ,前者对称分布,最大量值均在中间;后者不对称,最大量值偏向左边,且Total Bending Moment 出现拐点。
4.2.4 Beam 单元实例运用螺栓是机载设备设计中常用的连接件之一,具有结构简单、拆装方便、调整容易等优点,被广泛应用于航空、航天、汽车以及各种工程结构之中。
螺栓是否满足强度要求,关系到机载设备的稳定性和安全性。
针对螺栓的有限元分析,可以使用Beam188或实体单元进行计算,两者结果只存在细节差别。
对于实体单元由于实体完整,特别在15.0版本之后加入了螺纹接触,可以看到应力细节,缺点是加载预紧力后易出现应力集中现象,应力结果存在一些偏差;对于Beam188单元由于采用二维模型,忽略模型细节,可以得出整体的受力结果,对于大批量螺栓分析易于处理,缺点是忽略了螺栓实体本身的刚度,在螺母和螺栓头所在区域,应力是不真实的。
下面以法兰盘螺栓连接分析为例,分别以Beam188和实体建模,对比分析结果。
先以梁单元分析为例,简要说明计算流程。
(1)在DM里建模。
思路:首先建立一对法兰盘,然后基于小圆孔建立梁模型。
具体操作如下所示。
①在XYPlane建立Sketch1,建立一同心圆,实体拉伸(Extrude1);再建立Sketch2,绘制一小孔,实体拉伸(Extrude2);最后阵列(Pattern1)小孔。
具体设置及模型如图4-2-24所示。
图4-2-24 法兰盘建模②切分模型,将模型一分为二,如图4-2-25所示。
– 81 –。
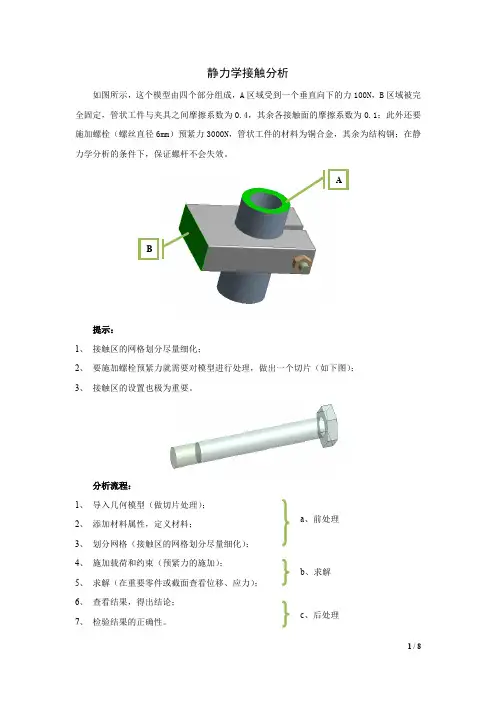
静力学接触分析如图所示,这个模型由四个部分组成,A区域受到一个垂直向下的力100N,B区域被完全固定,管状工件与夹具之间摩擦系数为0.4,其余各接触面的摩擦系数为0.1;此外还要施加螺栓(螺丝直径6mm)预紧力3000N,管状工件的材料为铜合金,其余为结构钢;在静力学分析的条件下,保证螺杆不会失效。
提示:1、接触区的网格划分尽量细化;2、要施加螺栓预紧力就需要对模型进行处理,做出一个切片(如下图);3、接触区的设置也极为重要。
分析流程:1、导入几何模型(做切片处理);2、添加材料属性,定义材料;3、划分网格(接触区的网格划分尽量细化);4、施加载荷和约束(预紧力的施加);5、求解(在重要零件或截面查看位移、应力);6、查看结果,得出结论;7、检验结果的正确性。
a、前处理b、求解c、后处理解题步骤:1、 导入模型:打开workbench ,双击static structural ,右键单击A3栏(即geometry )选择import geometry ,导入Pipe Clamp.x_t 模型,确定单位mm ;2、 切片处理:双击A3栏,进入Pipe Clamp.x_t 模型,如图1所示,新建坐标系(C 面),冻结模型(tools freeze ),在C 面处生成切片(create slice ),再将螺栓的两个solid 通过from new part 生成一个solid ;图1 螺栓切片处理3、 添加材料:返回到unsaved project-workbench 界面,双击A2栏(即engineering data ),双击outline filter 界面的A3栏(即general materials ),添加材料铜合金(即copper alloy ); 4、 定义材料:双击A4栏(即model ),将管状工件的assignment 设置为copper alloy ,其他材料均为structural steel ;5、 划分网格:单击mesh ,在其下拉菜单中选择preview surface mesh ,产生如图2所示相对粗糙的四面体网格,展开明细栏中的statistics 项目,检查模型节点输与单元数;图2 划分网格(粗糙)图3 statistics 项目6、 网格细分:选择装配图中的接触面,如图4所示,点击鼠标右键选择insert >refinement ,点击preview surface mesh ,观察其网格变化,并检查模型节点输与单元数,如图5、6所示;---------------------------------------------------------------------------------此为第一种方法 点击鼠标右键选择insert> contact sizing ,选择接触面和单元大小-------此为第二种方法图4 选择细化表面图5 网格细化图6 statistics 项目7、施加载荷:单击左侧的static structural,选择A表面,鼠标右键选择insert>force,力的大小设为100N,方向如图7所示;8、施加约束:选择B表面,鼠标右键选择insert>fixed support;9、加预紧力:选择如图所示D表面,鼠标右键选择insert>bolt pretension,设定力的大小为3000N;图7 施加约束与载荷10、添加摩擦系数:选择connections,在明细栏中将type改为frictional,管状工件与夹具之间的摩擦系数设为0.4,其余接触面的摩擦系数均为0.1;图8 设置摩擦面系数11、求解:单击solution,在弹出的工具条中,deformation下选择total查看装配图总变形;stress下选择equivalent stress查看装配图V on Mises等效应力;deformation下选择total查看螺栓总变形;stress下选择equivalent stress查看螺栓V on Mises等效应力;选择body,点击管状工件,鼠标右键选择insert>deformation>directional,查看管状工件X方向上的位移;右键单击solution选择insert,添加contact tool,查看螺栓与夹具在接触面处的frictional stress和pressure.12、查看结果:单击solve进行求解(图解);图9 装配图在X方向上的总位移图10 装配图Von Mises等效应力图11 螺栓在X方向上位移图12 螺栓Von Mises等效应力图13 螺栓与夹具接触面的frictional stress(摩擦应力)图14 螺栓与夹具接触面的pressure(压力)图15 管状工件在X方向上的位移13、查看报告:单击report preview,查看报告:表1:装配图、螺栓的位移和应力(如图9、10、11、12、15所示)表2:螺栓与夹具之间的受力分析(如图13、14所示)14、分析与结论:两种不同的细化网格对应力的结果产生很大影响(步骤6),但位移基本相同。
ANSYS WORKBENCH 11.0培训教程(DS)第四章静力结构分析序言•在DS中关于线性静力结构分析的内容包括以下几个方面:–几何模型和单元–接触以及装配类型–环境(包括载荷及其支撑)–求解类型–结果和后处理•本章当中所讲到的功能同样适用与ANSYS DesignSpace Entra及其以上版本.–本章当中的一些选项可能需要高级的licenses,但是这些都没有提到。
–模态,瞬态和非线性静力结构分析在这里没有讨论,但是在相关的章节当中将会有所阐述。
线性静力分析基础•在线性静力结构分析当中,位移矢量{x} 通过下面的矩阵方程得到:在分析当中涉及到以下假设条件:–[K] 必须是连续的•假设为线弹性材料•小变形理论•可以包括部分非线性边界条件–{F} 为静力载荷•不考虑随时间变化的载荷•不考虑惯性(如质量,阻尼等等)影响•在线性静力分析中,记住这些假设是很重要的。
非线性分析和动力学分析将在随后的章节中给予讨论。
[]{}{}F x K =A. 几何结构•在结构分析当中,可以使用所有DS 支持的几何结构类型.•对于壳体,在几何菜单下厚度选项是必须要指定的。
•梁的截面形状和方向在DM已经指定并且可以自动的传到DS模型当中。
–对于线性体,仅仅可以得到位移结果.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional xStructural xMechanical/Multiphysics x…Point Mass•Point Mass 在“Geometry”分支在模拟没有明确建模的重量–只有面实体才能定义point mass–可以用以下方式定义point mass位置:•在任意用户定义坐标系中(x, y, z)坐标•选择点/边/面来定义位置–重量/质量大小在“Magnitude”中输入–在结构静力分析中,point mass只受“加速度”,“标准重力加速度,”和“旋转速度”的作用.–质量和所选面相连通时它们之间没有刚度. 这不是一个刚度区域假设而是一个类似与分布质量的假设–没有旋转惯性项出现.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional x…Point Mass•point mass 将会以灰色圆球出现–前面提到,只有惯性力才会对point mass 起作用。
静力学接触分析如图所示,这个模型由四个部分组成,A区域受到一个垂直向下的力100N,B区域被完全固定,管状工件与夹具之间摩擦系数为0.4,其余各接触面的摩擦系数为0.1;此外还要施加螺栓(螺丝直径6mm)预紧力3000N,管状工件的材料为铜合金,其余为结构钢;在静力学分析的条件下,保证螺杆不会失效。
提示:1、接触区的网格划分尽量细化;2、要施加螺栓预紧力就需要对模型进行处理,做出一个切片(如下图);3、接触区的设置也极为重要。
分析流程:1、导入几何模型(做切片处理);2、添加材料属性,定义材料;3、划分网格(接触区的网格划分尽量细化);4、施加载荷和约束(预紧力的施加);5、求解(在重要零件或截面查看位移、应力);6、查看结果,得出结论;7、检验结果的正确性。
a、前处理b、求解c、后处理解题步骤:1、 导入模型:打开workbench ,双击static structural ,右键单击A3栏(即geometry )选择import geometry ,导入Pipe Clamp.x_t 模型,确定单位mm ;2、 切片处理:双击A3栏,进入Pipe Clamp.x_t 模型,如图1所示,新建坐标系(C 面),冻结模型(tools freeze ),在C 面处生成切片(create slice ),再将螺栓的两个solid 通过from new part 生成一个solid ;图1 螺栓切片处理3、 添加材料:返回到unsaved project-workbench 界面,双击A2栏(即engineering data ),双击outline filter 界面的A3栏(即general materials ),添加材料铜合金(即copper alloy ); 4、 定义材料:双击A4栏(即model ),将管状工件的assignment 设置为copper alloy ,其他材料均为structural steel ;5、 划分网格:单击mesh ,在其下拉菜单中选择preview surface mesh ,产生如图2所示相对粗糙的四面体网格,展开明细栏中的statistics 项目,检查模型节点输与单元数;图2 划分网格(粗糙)图3 statistics 项目6、 网格细分:选择装配图中的接触面,如图4所示,点击鼠标右键选择insert >refinement ,点击preview surface mesh ,观察其网格变化,并检查模型节点输与单元数,如图5、6所示;---------------------------------------------------------------------------------此为第一种方法 点击鼠标右键选择insert> contact sizing ,选择接触面和单元大小-------此为第二种方法图4 选择细化表面图5 网格细化图6 statistics 项目7、施加载荷:单击左侧的static structural,选择A表面,鼠标右键选择insert>force,力的大小设为100N,方向如图7所示;8、施加约束:选择B表面,鼠标右键选择insert>fixed support;9、加预紧力:选择如图所示D表面,鼠标右键选择insert>bolt pretension,设定力的大小为3000N;图7 施加约束与载荷10、添加摩擦系数:选择connections,在明细栏中将type改为frictional,管状工件与夹具之间的摩擦系数设为0.4,其余接触面的摩擦系数均为0.1;图8 设置摩擦面系数11、求解:单击solution,在弹出的工具条中,deformation下选择total查看装配图总变形;stress下选择equivalent stress查看装配图V on Mises等效应力;deformation下选择total查看螺栓总变形;stress下选择equivalent stress查看螺栓V on Mises等效应力;选择body,点击管状工件,鼠标右键选择insert>deformation>directional,查看管状工件X方向上的位移;右键单击solution选择insert,添加contact tool,查看螺栓与夹具在接触面处的frictional stress和pressure.12、查看结果:单击solve进行求解(图解);图9 装配图在X方向上的总位移图10 装配图Von Mises等效应力图11 螺栓在X方向上位移图12 螺栓Von Mises等效应力图13 螺栓与夹具接触面的frictional stress(摩擦应力)图14 螺栓与夹具接触面的pressure(压力)图15 管状工件在X方向上的位移13、查看报告:单击report preview,查看报告:表1:装配图、螺栓的位移和应力(如图9、10、11、12、15所示)表2:螺栓与夹具之间的受力分析(如图13、14所示)14、分析与结论:两种不同的细化网格对应力的结果产生很大影响(步骤6),但位移基本相同。
ansys workbench静力学约束类型ANSYS Workbench静力学约束类型ANSYS Workbench是目前工程仿真领域中最为常用的软件之一,它涵盖了多种工程领域的仿真分析功能,其中静力学分析是其重要应用之一。
在进行静力学分析时,对模型进行正确的约束是非常重要的。
在ANSYS Workbench中,有多种类型的约束可以应用于模型,本文将介绍ANSYS Workbench静力学约束类型,以帮助工程师正确地对模型进行约束,从而得到准确的仿真结果。
第一部分:什么是静力学约束?在进行静力学分析时,模型中的每个部件都需要受到一定的约束,以模拟真实工程中的实际情况。
静力学约束是指对模型进行限制,使得模型在受力作用下能够正确地表现出力学特性。
不同类型的约束将影响模型的响应,因此正确地选择约束类型对于静力学分析至关重要。
第二部分:ANSYS Workbench中的静力学约束类型ANSYS Workbench中包含多种类型的静力学约束,主要包括以下几种:1. 固定约束:固定约束是指对模型中的某些部件进行完全固定,使其不能发生任何位移。
这种约束适用于模型中的支撑部件或者已知位置的部件,可以通过对应的节点或者面进行施加。
2. 约束度(Constraint Equation):约束度是一种比较灵活的约束类型,它可以描述多种不同的约束条件,如位移约束、旋转约束等。
通过设定约束度的方程,可以对模型中的部件进行多种类型的约束,适用性较广。
3. 虚拟外力(Remote Displacement):虚拟外力是指通过施加外力来对模型中的节点进行约束,使其产生位移。
这种约束类型适用于对模型进行受力分析时,可以模拟外部载荷的作用。
4. 弹簧约束(Spring Connection):弹簧约束是指通过连接弹簧的方式对模型中的节点进行约束,可以模拟弹簧的特性,并且可以实现节点之间的相对位移。
5. 锁定(Lock):锁定约束是指通过对模型中的部件进行锁定,使其不能发生任何变形。
ANSYSWORKBENCH静力结构分析ANSYS WORKBENCH 11.0培训教程(DS)第四章静力结构分析序言在DS中关于线性静力结构分析的内容包括以下几个方面:–几何模型和单元–接触以及装配类型–环境(包括载荷及其支撑)–求解类型–结果和后处理本章当中所讲到的功能同样适用与ANSYS DesignSpace Entra及其以上版本.–本章当中的一些选项可能需要高级的licenses,但是这些都没有提到。
–模态,瞬态和非线性静力结构分析在这里没有讨论,但是在相关的章节当中将会有所阐述。
线性静力分析基础在线性静力结构分析当中,位移矢量{x} 通过下面的矩阵方程得到: 在分析当中涉及到以下假设条件:–[K] 必须是连续的假设为线弹性材料?小变形理论可以包括部分非线性边界条件–{F} 为静力载荷不考虑随时间变化的载荷不考虑惯性(如质量,阻尼等等)影响在线性静力分析中,记住这些假设是很重要的。
非线性分析和动力学分析将在随后的章节中给予讨论。
[]{}{}F x K =A. 几何结构在结构分析当中,可以使用所有DS 支持的几何结构类型.对于壳体,在几何菜单下厚度选项是必须要指定的。
梁的截面形状和方向在DM已经指定并且可以自动的传到DS模型当中。
–对于线性体,仅仅可以得到位移结果.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional xStructural xMechanical/Multiphysics x…Point MassPoint Mass 在“Geometry”分支在模拟没有明确建模的重量–只有面实体才能定义point mass–可以用以下方式定义point mass位置:在任意用户定义坐标系中(x, y, z)坐标选择点/边/面来定义位置–重量/质量大小在“Magnitude”中输入–在结构静力分析中,point mass只受“加速度”,“标准重力加速度,”和“旋转速度”的作用.–质量和所选面相连通时它们之间没有刚度. 这不是一个刚度区域假设而是一个类似与分布质量的假设–没有旋转惯性项出现.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional x…Point Masspoint mass 将会以灰色圆球出现–前面提到,只有惯性力才会对point mass 起作用。