机械设计基础第三章
- 格式:doc
- 大小:649.00 KB
- 文档页数:14
机械设计基础第三章:机械传动3.1传动概述机械传动是机械系统中的重要组成部分,其主要功能是传递动力和运动,实现各种机械设备的运动和动力转换。
机械传动系统通常由驱动装置、传动装置和执行装置三部分组成。
其中,传动装置是连接驱动装置和执行装置的中间环节,其主要作用是传递动力和运动,同时可以根据需要进行速度、扭矩和方向的调节。
3.2传动类型根据传动原理和传动方式的不同,机械传动可以分为多种类型,包括齿轮传动、皮带传动、链传动、蜗杆传动、螺旋传动、行星齿轮传动等。
各种传动方式都有其特点和适用范围,需要根据具体的工作条件和要求进行选择。
3.3齿轮传动齿轮传动是机械传动中应用最广泛的一种传动方式,其主要特点是传动效率高、传动精度高、可靠性好、寿命长等。
齿轮传动的基本原理是利用齿轮的啮合传递动力和运动,根据齿轮的啮合方式不同,齿轮传动可以分为直齿圆柱齿轮传动、斜齿圆柱齿轮传动、圆锥齿轮传动和蜗杆传动等。
3.4皮带传动皮带传动是利用皮带与带轮之间的摩擦力传递动力和运动的一种传动方式。
皮带传动具有结构简单、安装方便、传动平稳、噪音低、维护容易等特点。
根据传动皮带的材料不同,皮带传动可以分为橡胶带传动、V带传动、同步带传动等。
3.5链传动链传动是利用链条与链轮之间的啮合传递动力和运动的一种传动方式。
链传动具有传动效率高、传动精度高、承载能力强、寿命长等特点。
链传动适用于高速、重载、高温、腐蚀等恶劣环境下工作的机械传动。
3.6蜗杆传动蜗杆传动是利用蜗杆与蜗轮之间的啮合传递动力和运动的一种传动方式。
蜗杆传动具有传动比大、传动精度高、噪音低、可靠性好等特点。
蜗杆传动适用于低速、大扭矩、重载、高温、腐蚀等恶劣环境下工作的机械传动。
3.7螺旋传动螺旋传动是利用螺旋副的啮合传递动力和运动的一种传动方式。
螺旋传动具有传动精度高、承载能力强、寿命长等特点。
螺旋传动适用于低速、大扭矩、重载、高温、腐蚀等恶劣环境下工作的机械传动。
3.8行星齿轮传动行星齿轮传动是利用行星齿轮与太阳轮、内齿轮之间的啮合传递动力和运动的一种传动方式。
第三章机械零件的强度3-1 材料的疲劳特性§3-2 机械零件的疲劳强度计算§3-3 机械零件的抗断裂强度§3-4 机械零件的接触强度疲劳曲线机械零件的疲劳大多发生在s -N 曲线的CD 段,可用下式描述:)(D C m rN N N N C N ≤≤= s )D r rN N N >=∞ (s s D 点以后的疲劳曲线呈一水平线,代表着无限寿命区其方程为:由于N D 很大,所以在作疲劳试验时,常规定一个循环次数N 0(称为循环基数),用N 0及其相对应的疲劳极限σr 来近似代表N D 和σr∞,于是有:CN N ==0m rm rN s s 有限寿命区间内循环次数N 与疲劳极限s rN 的关系为:式中,s 、N 及m 的值由材料试验确定。
二、s -N 疲劳曲线m0r rN N N s s =0mrN r N N ⎪⎪⎭⎫ ⎝⎛=s s s -N 疲劳曲线详细说明极限应力线图三、等寿命疲劳曲线(极限应力线图)机械零件材料的疲劳特性除用s -N 曲线表示外,还可用等寿命曲线来描述。
该曲线表达了不同应力比时疲劳极限的特性。
在工程应用中,常将等寿命曲线用直线来近似替代。
用A 'G'C 折线表示零件材料的极限应力线图是其中一种近似方法。
A 'G'直线的方程为:m a1s ψs s s '+'=-s m as s s ='+'C G'直线的方程为:12s s s ψs -=-ψσ为试件受循环弯曲应力时的材料常数,其值由试验及下式决定:详细介绍对于碳钢,ψ≈0.1~0.2,对于合金钢,ψ≈0.2~0.3。
机械零件的疲劳强度计算1一、零件的极限应力线图由于零件几何形状的变化、尺寸大小、加工质量及强化因素等的影响,使得零件的疲劳极限要小于材料试件的疲劳极限。
以弯曲疲劳极限的综合影响系数Kσ表示材料对称循环弯曲疲劳极限σ-1与零件对称循环弯曲疲劳极限σ-1e 的比值,即e11--=s s s K 在不对称循环时,Kσ是试件与零件极限应力幅的比值。



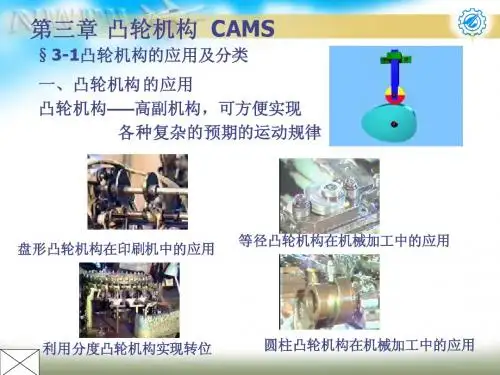
§3.1 凸轮机构的应用和类型凸轮机构的组成:主要由凸轮、从动件和机架三个基本构件组成。
1)凸轮:具有曲线轮廓的原动件。
2)从动杆:运动规律受凸轮限制。
3)机架:凸轮机构中相对凸轮和从动件的静止件。
凸轮机构的优点:可实现各种复杂的运动要求,结构简单、紧凑。
缺点:点、线接触,易磨损,不适合高速、重载压簧线接触e1213 43——蜗轮4——蜗杆点接触盘状凸轮绕线机构拉簧录音机卷带机构线接触图3:滚子从动件:滚子从动件直线凸轮机构从动件作往复摆动1——直线凸轮2——滚子从动件送料斗推杆料线接触图4:滚子从动件滚子从动件圆柱凸轮机构从动件作往复直线移动1——圆柱凸轮2——滚子从动件与电子元件相配的凸轮凸轮式间歇运动机构原理及特点组成:1.主动凸轮、2.从动盘、3.滚子2. 工作原理主动凸轮连续转动,推动从动盘实现间歇分度转动。
3. 机构特点★结构紧凑,不需定位装置即可获得高的定位精度★廓线设计得当,可使从动件获得预期的任意运动;★动载荷小,无冲击,宜高速;★加工成本高,安装、调整要求严。
根据凸轮和从动件的不同形式,凸轮机构可进行如下分类:1.按凸轮的形状1)盘形凸轮(图3-1,图3-2 ):凸轮是绕固定轴线转动并且具有变化半径的盘形零件。
2)直线凸轮(图3-3 ):凸轮回转运动中心趋于无穷远,凸轮相对机架作直线运动。
3)圆柱凸轮(图3-4 ):移动凸轮卷成圆柱体即为圆柱凸轮。
2. 按从动件的形式分类1)尖顶从动件(图3-2,图3-5 )从动件与凸轮轮廓为点接触,因此能实现预期的运动规律。
缺点:点接触磨损快。
应用场合:低速,载荷不大。
2)滚子从动件(图3-3 ,图3-4 )从动件与凸轮轮廓为线接触,可以承受较大载荷。
缺点:有干涉问题。
应用场合:低速,载荷较大。
3)平底从动件(图3-1)从动件与凸轮轮廓为线接触,凸轮与从动件之间的作用力始终与从动件的运动方向相同,传动效率较高,易于形成润滑油膜。
应用场合:高速3. 按凸轮与从动件维持高副接触(锁合或封闭)的方式分:1)外力锁合:重力(从动件重量)、弹簧力或其他外力。
图3-3 仿形刀架第3章 凸轮机构§3-1 凸轮机构的应用与分类一、凸轮机构的应用与特点凸轮机构广泛应用于各种自动机械和自动控制装置中。
如图3-1所示的内燃机配气机构,凸轮1是向径变化的盘形构件,当它匀速转动时,导致气阀的推杆2在固定套筒3内上下移动,使推杆2按预期的运动规律开启或关闭气阀(关闭靠弹簧的作用),使燃气准时进入气缸或废气准时排出气缸。
如图3-2所示的自动送料机构,构件1是带沟槽的凸轮,当其匀速转动时,迫使嵌在其沟槽内的送料杆2作往复的左右移动,达到送料的目的。
如图3-3图3-1 内燃机配气机构 图3-2 自动送料凸轮机构所示,构件1是具有曲线轮廓且只能作相对往复直线运动的凸轮,当刀架3水平移动时,凸轮1的轮廓使从动件2带动刀头按相同的轨迹移动,从而切出与凸轮轮廓相同的旋转曲面。
由上可知,凸轮是具有某种曲线轮廓或凹槽的构件,一般作连续匀速转动或移动,通过高副接触使从动件作连续或不连续的预期运动。
凸轮机构通常由凸轮、从动件和机架组成。
从动件的运动规律由凸轮的轮廓或沟槽的形状决定。
所以只需设计合适的凸轮轮廓曲线,即可得到任意预期的运动规律,且凸轮机构简单紧凑,这就是凸轮机构广泛应用的优点。
但是凸轮与从动件之间的接触是高副,易于磨损,所以常用于传力不大的控制机构。
二、凸轮机构的分类凸轮的类型很多,常按以下三种方法来分类:1.按凸轮的形状来分(1)盘形凸轮(图3-1)凸轮绕固定轴心转动且向径是变化的,其从动件在垂直于凸轮轴的平面内运动。
是最常用的基本形型式。
(2)移动凸轮(图3-3)凸轮作往复直线移动,它可看作是轴心在无穷远处的盘形凸轮。
(3)圆柱凸轮(图3-2)凸轮是在圆柱上开曲线凹槽,或在圆柱端面上做出曲线轮廓的构件。
盘形凸轮和移动凸轮与从动件之间的相对运动都是平面运动,属于平面凸轮机构。
圆柱凸轮与从动件之间的运动是空间运动,属于空间凸轮机构。
2.按从动件的形状来分图3-4 从动件的形状(1)尖顶从动件如图3-4a所示,该从动件结构简单,尖顶能与任意复杂的凸轮轮廓保持接触,可实现从动件的任意运动规律。
但尖顶易磨损,所以只适用于作用力很小的低速凸轮机构,如仪表机构中。
(2)滚子从动件如图3-4b所示,该从动件的端部装有可自由转动的滚子,使其与凸轮间为滚动摩擦,可减少摩擦和磨损,能传递较大的动力,应用广泛。
但结构复杂,端部质量较大,所以不宜用于高速场合。
(3)平底从动件如图3-4c所示,若不考虑摩擦,凸轮对从动件的作用力始终垂直于平底,传动效率最高,且平底与凸轮轮廓间易形成油膜,有利于润滑,所以可用于高速场合。
但是平底不能用于有内凹曲线或直线的凸轮轮廓的凸轮机构。
3.按凸轮与从动件保持接触(称为封闭)的方式来分(1)力封闭如图3-1和图3-4所示,分别依靠弹簧力和重力使从动件和凸轮始终保持接触。
3-5 形封闭凸轮结构(2)形封闭如图3-5a所示,凸轮上加工有沟槽,从动件的滚子嵌在其中,保证凸轮与从动件始终接触。
如图3-5b所示,利用凸轮和从动件的特殊几何结构保证凸轮与从动件以一定值始终接触。
§3-2 从动件常用的运动规律一、凸轮机构运动过程及有关名称图3-6 凸轮机构的运动过程图3-6所示为一对心直动尖顶从动件盘形凸轮机构。
以凸轮轴心O为圆心,凸轮轮廓最小向径为半径所作的圆称为凸轮的基圆,其半径称为基圆半径,用r0表示。
通常取基圆与轮廓的连接点A为凸轮轮廓曲线的起始点。
从动件与轮廓在A点接触时,它距轴心O最近。
当凸轮顺时针方向转动时,轮廓上的点依次与从动件的顶尖接触。
由于AB段的向径值是逐渐增大的,所以导致从动件逐渐原理凸轮轴心O,当转到最大向径OB位置时,从动件运动到B’最高位置(即距固定轴心O最远位置),这一运动过程称为推程,相对应转过的角度∠AOB为推程运动角,用θ0表示,这时从动件移动的距离为升程,用h表示。
当凸轮继续回转,以O为圆心的圆弧BC上的点依次与从动件接触,由于向径不变,所以从动件处于最远位置静止不动,所对应的角度∠BOC为远休止角,用θs表示。
当凸轮继续回转,轮廓CD 段与从动件接触,由于CD段向径是逐渐减小的,所以从动件从最远位置逐渐回到最初位置,这一运动过程称为回程,对应所转过的角度∠COD称为回程运动角,用θh表示。
凸轮继续回转,基圆上的圆弧DA段与从动件接触,从动件在距轴心最近位置静止不动,对应转过的角度∠DOA为近运动角,用θs’表示。
当凸轮连续回转时,从动件将重复进行升-停-降-停的运动循环。
通过上述分析可知,从动件的运动规律取决于凸轮轮廓曲线的形状,也就是说,从动件的不同运动规律要求凸轮具有不同的轮廓曲线。
所以设计凸轮轮廓曲线时,首先根据适应工作要求选定的从动件的运动规律,得出相应的轮廓曲线。
从动件的运动规律就是从动件的位移(s)、速度(v)和加速度(a)随时间(t)变化的规律。
通常凸轮作匀速转动,其转角θ与时间t成正比(θ=w t),所以从动件的运动规律也可用从动件的运动参数随凸轮转角θ的变化规律来表示。
下面介绍几种常用的从动件运动规律。
二、从动件的常用运动规律1.等速运动规律从动件运动的速度为常数时的运动规律,称为等速运动规律。
推程时,凸轮以等角速度w 转动,经过t 0时间,凸轮转过的推程运动角为θ0,从动件等速完成的升程为h 。
从动件的位移s 与凸轮转角θ成正比,其位移曲线为一过原点的倾斜直线,如图3-7所示。
根据位移s 、速度v 、加速度a 之间的导数关系,经推导整理得从动件推程的运动方程式:⎪⎪⎪⎭⎪⎪⎪⎬⎫===0s 00a w h v h θθθ (3-1a ) 回程时,凸轮以等角速度w 转动,经过t 0时间,凸轮转过的回程运动角为θh ,而从动件等速下降h 。
同理可得从动件回程的运动方程式: ⎪⎪⎪⎭⎪⎪⎪⎬⎫=-=-=01s a w h v h h h θθθ)( (3-1b ) 由图3-7可知,从动件在运动开始的瞬间,速度由0突变为w h 0θ,则加速度a 为+∞。
同理在推程终止的瞬间,速度由w h0θ突变为0,则加速度a 为-∞。
在这两个位置,由加速度引起的惯性力在理论上为无穷大。
而实际上,由于材料的弹性变形,加速度和惯性力不会达到无穷大,但是会引起强烈的冲击,这种冲击称为刚性冲击。
因此等速运动规律只适用于低速轻载的凸轮机构。
2.等加速等减速运动规律等加速等减速运动规律是指从动件在一个行程中,前半行程作等加速运动,后半行程作等减速运动,且等加速度与等减速度的绝对值相等。
在等加速度段,从动件速度由0加速到max ν,在等减速度段,从动件速度由max ν减速到0,所用的时间相等,各为t 0/2,且所完成的位移也相同,各为h/2,凸轮以w 匀速转动的转角也各为θ0/2。
经推导整理得推程从动件运动方程为:前半推程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫===20220220442θθθθθhw a hw v h s (3-2a ) 后半推程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-=-=--=20202020204)(4)(2θθθθθθθhw a hw v hh s (3-2b ) 同理可得回程时从动件得运动方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-=-=-=22222442h h h hw a hw v h h s θθθθθ(等加速段) ⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-=--=-=222224)(4)(2h h h h h hw a hw v h s θθθθθθθ(等减速段) (3-3) 根据式(3-2a )和(3-2b )可得到从动件的运动曲线,如图3-8所示。
由图可知,速度曲线是连续的,无突变,故不会产生刚性冲击。
但是在推程开始、结束和由等加速过渡到等减速的瞬间,加速度出现有限值的突变,这将产生有限惯性力的突变而引起冲击,这种冲击称为柔性冲击。
它比刚性冲击要小得多。
所以一般用于中、低速凸轮机构。
用图解法设计凸轮轮廓时,通常需要绘制从动件的位移曲线。
等加速等减速运动规律位移曲线是一凹一凸两段抛物线连接的曲线,其绘制方法如下:由于2θK s =(202θh K =)可知,若将转角θ0/2分成若干等分,则位移的比值为1:4:9:….。
如图3-8a 所示,在横坐标轴上将转角θ0/2线段分成若干等分(图中为3等分),得1、2、3各点,过这些点作横轴的垂线。
再过点O 作任意的斜线OO ',在其上以适当的单位长度从点O 按1:4:9量取对应长度,得1、4、9各点。
连接直线9-3",并分别过4和1两点作其平行线4-2"和1-1",分别与S 轴相交于2"、1"点。
最后由1"、2"、3"点分别向过1、2、3各点的垂线投影,得1'、2'、3'点,将这些点连接成光滑的曲线,即为等加速段的抛物线。
用同样的方法可得等减速段的抛物线。
3.简谐(余弦加速度)运动规律质点在圆周上作等速运动时,它在这个圆直径上的投影所构成的运动称为简谐运动。
从动件作简谐运动时,其加速度是按余弦规律变化的,所以该运动规律称为余弦加速度运动规律,也称为简谐运动规律。
图3-7 等速运动 图3-8 等加速等减速运动在推程阶段,从动件的运动方程为:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛=⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=θθπθπθθπθπθθπ02022000cos 2sin 2cos 12hw a hw v h s (3-5a ) 在回程阶段,从动件的运动方程为:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛-=⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+=θθπθπθθπθπθθπh h h h hw a hw v h s cos 2sin 2cos 12222h (3-5b ) 按式(3-5a )作出简谐运动的运动曲线,如图3-9所示。
由图可知,从动件在运动的始末两位置加速度有突变,所以也会引起柔性冲击,因此在一般情况下只适用于中速凸轮机构。
需注意的是:当从动件作升-降-升运动循环时,且在推程和回程中都采用简谐运动规律,则可得到连续的加速度曲线,这种情况将无刚性冲击也无柔性冲击,所以可用于高速凸轮机构中。
简谐运动规律位移曲线图作法如下(如图3-9a ):以从动件的升程h 为直径作一半圆,将凸轮运动转角θ0分成若干等分(图中为8等分),同样把半圆分成和θ0相同的等分数,分别得到1,2,3...点和1',2',3'...点,过1,2,3,...点作垂线11',22',33',...,然后将圆上的等分点投影到相应的垂线上得1",2",3",...点。
用光滑曲线连接这些点,即得到从动件的位移曲线。
以上是以直动从动件盘形凸轮机构为例,介绍了几种从动件常用的运动规律。
它同样适用于摆动从动件盘形凸轮机构,其位移方程式中以摆动从动件的角位移ψ代替直动从动件的直线位移s ,以摆动的最大摆角ψmax 代替直动从动件的行程h 。