FANUC+维修培训系列资料6参数详解.pdf
- 格式:pdf
- 大小:161.78 KB
- 文档页数:6

FANUC数控系统的常⽤维修调整参数及设置第⼆参考点参数发那科数控系统光栅⽣效NO.1815.1=1 FSSB开放相应接⼝。
⼆、进给轴控制相关参数1423 ⼿动速度1424 ⼿动快进1420 G00快速1620 加减速时间1320 软件限位1326三、回零相关参数NO.1620 快进减速时间300msNO.1420 快进速度 10mNO.1425 回零慢速NO.1428 接近挡铁的速度NO.1850 零点偏置四、SP调整参数NO.3701.1=1 屏蔽主轴NO.4020 电机最⼤转速NO.3741 主轴低档转速(最⾼转速)NO.3742 主轴⾼档转速(最⾼转速)NO.4019.7=1 ⾃动设定SP参数(即主轴引导)NO.4133 主电机代码NO.3111.6=1 显⽰主轴速度NO.3111.5=1 显⽰负载监视器NO.4001.4 主轴定位电压极性(定位时主轴转向)NO.3705.1=1 SOR⽤于换档NO.3732=50 换档速度NO.4076=33 定位速度NO.4002.1=1 外接编码器⽣效NO.4077 定位脉冲数(主轴偏置)NO.3117.0=1 显⽰主轴负载表第⼆参考点参数OM系列:735~738;X/Y/Z/4Oi系列:1241采⽤绝对编码器时,先将参数#1815.4改为0,当回零位置发⽣变化以后,第⼆参考点位置也会发⽣变化。
因此第⼆参考点的数值(参数:1241),就要重新设置,⽅法是先将该轴回零,然后⽤⼿脉将该轴摇⾄原先的位置(特别是换⼑点的轴要与机械⼿配合),这时显⽰器上该轴的数字再乘以每脉冲所⾛的距离的倒数,如0.001us/单脉冲,即乘以1000,输⼊到1241⾥去,可能要经过⼏次修调。
才能确定第⼆参考点。
数值输⼊完后,将#1815.4改为 1。
2,存储⾏程软限位参数O系列:700~702,对应 X/ Y/ Z轴设置值:0~9999999当设置 9999999 时,取消正⽅向软限位703;707,对应 4;-4,⼀般为回转轴704~706,对应-X/-Y/-Z轴设量值:0~ -9999999当设置为 -9999999 时。
数控维修常用参数FANUCFANUC数控系统是目前广泛应用于数控机床的一套完整的控制系统,其参数设置和调整对于机床运行的稳定性和使用寿命都有非常重要的影响。
本文将介绍常用的FANUC数控系统的参数设置和调整方法。
1. 脉冲当量(Pulse Equivalency,PE)脉冲当量是指伺服电机每转动一定角度所需的脉冲数量。
FANUC数控系统中的每个轴都需要设置脉冲当量。
在机床加工时,FANUC数控系统通过计算脉冲数量来控制电机的转动角度,从而实现精确的加工。
脉冲当量的设置过大或过小都会导致机床加工精度的下降。
通常情况下,可以通过调整脉冲当量来提高加工精度。
脉冲当量的设置方法是根据机床的传动结构和伺服系统的性能进行计算,并通过实际加工进行调整。
2. 速度环比例增益(P-Gain)速度环比例增益是指在伺服电机的速度控制环节中,通过调整输入速度和输出速度的比例关系来提高系统的动态性能。
过大的比例增益会导致系统震荡或不稳定,过小的比例增益会影响系统的动态响应能力。
在FANUC数控系统中,可以通过调整速度环比例增益来提高机床的加工效率和精度。
一般情况下,可以通过实际加工试验和性能评估来确定最佳的速度环比例增益值。
3. 加速度环比例增益(A-Gain)加速度环比例增益是指在伺服电机的加速度控制环节中,通过调整输入加速度和输出加速度的比例关系来提高系统的动态性能和加工效率。
在FANUC数控系统中,可以通过调整加速度环比例增益来提高机床的动态性能和加工效率。
一般情况下,可以通过实际加工试验和性能评估来确定最佳的加速度环比例增益值。
4. 位置环比例增益(P-Gain)位置环比例增益是指在伺服电机的位置控制环节中,通过调整输入位置和输出位置的比例关系来提高系统的定位精度和稳定性。
在FANUC数控系统中,可以通过调整位置环比例增益来提高机床的定位精度和稳定性。
一般情况下,可以通过实际加工试验和性能评估来确定最佳的位置环比例增益值。
FANUC数控系统维修及参数2009-8-15 8:41:04 FANUC数控系统维修技巧1由于现代数控系统的可*性越来越高,数控系统本身的故障越来越低,而大部分故障主要是由系统参数的设置,伺服电机和驱动单元的本身质量,以及强电元件、机械防护等出现问题而引起的。
设备调试和用户维修服务是数控设备故障的两个多发阶段。
设备调试阶段是对数控机床控制系统的设计、PLC编制、系统参数的设置、调整和优化阶段。
用户维修服务阶段,是对强电元件、伺服电机和驱动单元、机械防护的进一步考核,以下是数控机床调试和维修的几个例子:例1一台数控车床采用FAGOR80 2 5控制系统,X、Z轴使用半闭环控制,在用户中运行半年后发现Z轴每次回参考点,总有2、3mm的误差,而且误差没有规律,调整控制系统参数后现象仍没消失,更换伺服电机后现象依然存在,后来仔细分析后估计是丝杠末端没有备紧,经过螺母备紧后现象消失。
例2一台数控机床采用SIEMENS81 0T系统,机床在中作中PLC程序突然消失,经过检查发现保存系统电池已经没电,更换电池,将PLC传到系统后,机床可以正常运行。
由于SIEMENS81 0T系统没有电池方面的报警信息,因此,SIEMENS81 0T系统在用户中广泛存在这种故障。
例 3 一台数控车床配FANUCO-TD系统,在调试中时常出现CRT闪烁、发亮,没有字符出现的现象,我们发现造成的原因主要有:①CRT亮度与灰度旋钮在运输过程中出现震动。
②系统在出厂时没有经过初始化调整。
③系统的主板和存储板有质量问题。
解决办法可按如下步骤进行:首先,调整CRT的亮度和灰度旋钮,如果没有反应,请将系统进行初始化一次,同时按RST键和DEL键,进行系统启动,如果CRT仍没有正常显示,则需要更换系统的主板或存储板。
例4一台加工中心TH6 2 40,采用FAGOT80 55控制系统,在调试中C轴精度有很大偏差,机械精度经过检查没有发现问题,经过FAGOR技术人员的调试发现直线轴与旋转轴的伺服参数的计算有很大区别,经过重新计算伺服参数后,C轴回参考点,运行精度一切正常。
FANUC_数控系统维修调整资料fanuc发那科维修说明书故障分析解决FANUC 数控系统维修调整资料(WIA日照工厂)2007-2-19说明本资料是根据网络收集的部分资料以及韩国工程技术人员来WIA培训的部分笔记整理而成,主要针对平时工作中能遇到几率高的问题,时间仓促,加上本人的笔记可能不全面,错误在所难免,如果大家发现有错误或遗漏,请及时补正修改,以方便大家工作。
WIA日照工厂所用的数控系统主要是FANUC系列中的0系列、0i系列、POWER MATE 系列和110M,本资料试图将这几个系列的系统的数据备份、恢复、原点调整、ALARM信息以及相关的参数做详细说明,并附录了0系列故障诊断与处理的部分,希望能对大家的工作有所帮助。
FANUC 0TT 原点设置方法WIA日照工厂内WA30-10T采用的就是本类型.下面以两轴系统(X轴Z轴)为例,说明原点调整的方法。
1( MODE选择为HANDLE,将X轴Z轴手动调整好原点(参照系统的原点标志,使之对齐)。
2( MODE选择为MDI ,按DNGOS,直至出现PARAMETER画面,用?下找PWE参数,将其修改为“1”。
3( 按NO.,输入22,按INPUT,屏幕(CRT)显示参数号为21。
的参数,将参数“21”的值全部修改为“0”。
4( 关闭NC电源,5秒后打开,按“运行准备”。
5( 按DNGOS,直至出现PARAMETER画面,按NO.,输入22,按INPUT,屏幕(CRT)显示参数号为21。
的参数,将参数“21”的后3位修改为“101”。
( 修改PWE参数为“0”。
6( 出现ALARM100 ALARM000,关闭NC电源,5秒后再开,系统显7示X轴Z轴坐标为“0.000”,原点调整完毕。
参数说明:FANUC 0MC 原点设置方法此处以3轴系统为例,说明此系统恢复原点的方法。
修改相应参数的方法以及相关参数的含义参照0TT 的修改步骤。
1) 将PWE“0”改为“1”,更改参数NO.76.1=1,NO.22改为00000000,(此时CRT显示“300”报警即X、Y、Z轴必须手动返回参考点。
维修培训实习教材第二节基本参数设定一实习目的(一)掌握FANUC 数控系统的参数输入方法(二)掌握FANUC 数控系统的参数设定步骤(三)掌握机床运行所需要设定的最基本参数二实习内容学习“参数设定支持画面”中每一项的设定三实习步骤有关参数设定的说明:对于FANUC数控系统,其参数的数目是很大的,想对每一位参数都进行掌握和设定是很困难的。
事实上,对FANUC数控系统参数,并不是需要对其输入某个数值才称之为设定参数。
大部分的位型参数,设为0时反而是有效的,设为0反而是很多机床默认的习惯状态。
这点在进行参数学习时要清楚。
具体步骤:(一)系统通电,将“参数可写入”开关打开。
(二)系统断电,重新开机,开机的同时按住[RESET]功能键直到系统进入正常画面,其结果是系统参数被清除,但系统功能参数(也叫保密参数)(NO.9900-9999)不被清除,如果是新版系统,系统功能参数(也叫保密参数)存在于系统软件中,也不会被清除。
所以,此项操作仅会清除系统功能参数(也叫保密参数)之外的普通参数(三)按[SYSTEM] 功能键,然后按扩展软键[+]几次,直到出现参数设定支持画面的软键[PRMTUN] 。
进入参数设定支持画面(按软键[PRMTUN])。
画面中的项目就是参数的设定调试步骤。
这次着重学习第一项“AXISSETTING(轴设定)”项和最后一项“MISCELLANY (其它)”项,参数设定支持画面里的其他项(伺服参数设定,主轴设定等)将在别的课时里学习。
(四)按照顺序设定这两项参数。
第一项:按此键几次,出现下图中的软键[PRMTUN]参数设定步骤和内容AXIS SETTING(轴设定)项,轴设定里面有以下几个组,对每一组参数进行设定。
第二项:“MISCELLANY (其它)”项,也就是参数设定支持画面里的最后一项,里面有一个组,对该组的参数进行设定。
(五)设完之后,用手动进给方式尝试实现轴的进给,同时观察系统诊断画面,看看在梯形图控制正常的情况下,轴为什么不能实现进给?注意以下几个参数:PRM NO. 1023PRM NO. 1800#1PRM NO. 3003#0 3003#2 3003#3PRM NO. 3004#5请查找手头的<0i-C参数说明书>,了解它们的详细意义,然后进行正确的设定。

课程名称程序员课程名称:程序员A2015-10-11上海发那科机器人有限公司第一章安全1第五章程序的管理5目录第二章机器人单元2第六章指令6第三章零点复归3第七章备份备份//加载7第四章坐标系设置4第八章基本保养8第九章机器人易耗品介绍9第一章安全1安全操作规程1.示教和手动机器人1)请不要带着手套操作示教盒和操作面板。
2)在点动操作机器人时要采用较低的速度倍率以增加对机器人的控制机会。
3)在按下示教盒上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5)机器人周围区域必须清洁、无油、水及杂质等。
安全操作规程2.生产运行1)在开机运行前,必须知道机器人根据所编程序将要执行的全部任务。
2)必须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下必知道机人控制和外控制设备的紧急停按钮的位准备在紧急情使用这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
因为这时机器人很有可能是在等待让它继续移动的输入信号。
第二章机器人单元2系统软件机人控制柜机器人周边设备机器人1、机器人的概论一、机器人绝对值脉交流伺电机冲编码器服电机抱闸单元弧焊点焊搬运涂胶喷漆去毛刺切割激光焊接测量等2、机器人的应用弧焊、点焊、搬运、涂胶、喷漆、去毛刺、切割、激光焊接、测量等3、机器人的规型号常机器人型号包括本体型号和控制柜型号。
本体型号位于机器人J3轴手臂上,如下图:FANUCRobotR-2000i B210F如:R ‐2000iB/210F控制柜型号位于控制柜门右上角。
目前在用的主要型号有:R-J3i B、R-J3i C、R-30i A、R-30i B等。
R-30如:R30i B4、机器人的主要参数¾手部负重¾运动轴数¾2,3轴负重23轴负重¾运动范围¾安装方式¾重复定位精度¾最大运动速度在线编程:5、机器人的编程方式z在线编程:围栏内围栏外z 离线编程:6、机器人的安装环境环境温度:0-45摄氏度;环境湿度:普通: ≤75%RH(无露水、霜冻);环境湿度:普通:≤75%RH(无露水、霜冻);短时间:95%(一个月之内);不应有结露现象不应有结露现象;振动:≤0.5G(4.9M/s2) ;7、机器人的特色功能¾High sensitive collision detector高性能碰撞检测机能,机器人无须外加传感器,各种场合均适用¾Soft float软浮动功能用于机床工件的安装和取出,有弹性的机械手¾Remote TCP8、机器人的运动¾机器人根据TP示教或程序中的动作指令进行移动。
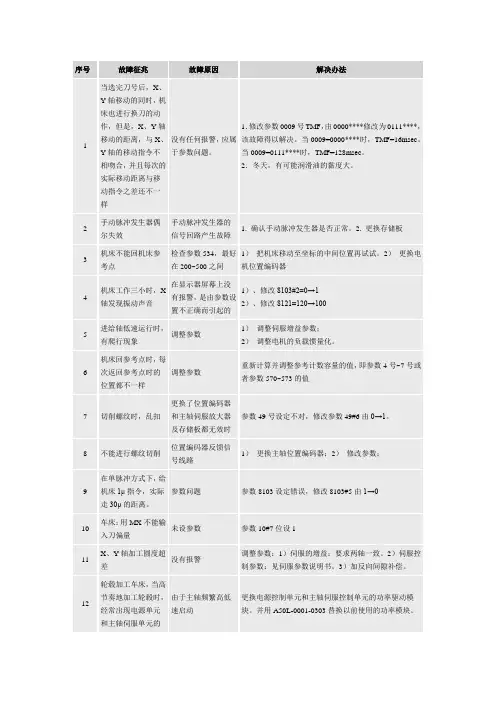
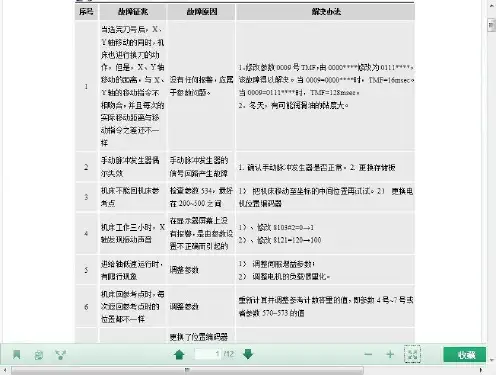
序号故障征兆故障原因解决办法1 当选完刀号后,X、Y轴移动的同时,机床也进行换刀的动作,但是,X、Y轴移动的距离,与X、Y轴的移动指令不相吻合,并且每次的实际移动距离与移动指令之差还不一样没有任何报警,应属于参数问题。
1.修改参数0009号TMF,由0000****修改为0111****,该故障得以解决。
当0009=0000****时,TMF=16msec。
当0009=0111****时,TMF=128msec。
2.冬天,有可能润滑油的黏度大。
2 手动脉冲发生器偶尔失效手动脉冲发生器的信号回路产生故障1. 确认手动脉冲发生器是否正常。
2. 更换存储板3 机床不能回机床参考点检查参数534,最好在200~500之间1)把机床移动至坐标的中间位置再试试。
2)更换电机位置编码器4 机床工作三小时,X轴发现振动声音在显示器屏幕上没有报警,是由参数设置不正确而引起的1)、修改8103#2=0→12)、修改8121=120→1005 进给轴低速运行时,有爬行现象调整参数1)调整伺服增益参数;2)调整电机的负载惯量化。
6 机床回参考点时,每次返回参考点时的位置都不一样调整参数重新计算并调整参考计数容量的值,即参数4号~7号或者参数570~573的值7 切削螺纹时,乱扣更换了位置编码器和主轴伺服放大器及存储板都无效时参数49号设定不对,修改参数49#6由0→1。
8 不能进行螺纹切削位置编码器反馈信号线路1)更换主轴位置编码器;2)修改参数;9 在单脉冲方式下,给机床1μ指令,实际走30μ的距离。
参数问题参数8103设定错误,修改8103#5由1→010 车床:用MX不能输入刀偏量未设参数参数10#7位设111 X、Y轴加工圆度超差没有报警调整参数:1)伺服的增益:要求两轴一致。
2)伺服控制参数:见伺服参数说明书。
3)加反向间隙补偿。
12 轮毂加工车床,当高节奏地加工轮毂时,经常出现电源单元和主轴伺服单元的由于主轴频繁高低速启动更换电源控制单元和主轴伺服控制单元的功率驱动模块。
发那科参数(详细)讲解四轴参数说明N0000 00000010 (#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 00000000 #1=0纸带格式为标准格式N0002 P 00000000 (手动回零:#7 =0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000000 #0各轴镜像设定:=0关断,=1开通// 以下为串口参数N0020 P 0 (0/1:选择串口1,即JD5A;2:选择串口2,即JD5B)N0100 P 00101000 (#3=1 ISO代码对EOB仅输出LF;#5=1 DNC中连续读入直到缓冲区满,=0一段一段读入)N0101 P 00000001 (#0=1停止位两位,=0为1位;#3=0输入代码为EIA或ISO代码自动识别,=1为ASC||代码) N0102 P 0 (输入输出为RS232,使用DC1~DC4)N0103 P 11 (波特率为9600)N0110 P 00000000N0111 P 00000001 (以下为NO.0020=1时通道1,即JD5A的参数;同上含义)N0112 P 6N0113 P 10N0121 P 00000001 (以下为NO.0020=2时通道2,即JD5B的参数;同上含义)N0122 P 0N0123 P 10N0960 P 00000000// 以下为轴控制和设定单位参数N1001 P 00000000 (#0=0公制机床,=1英制机床)N1002 P 00001001 (#0=1手动同时控制轴数3轴;#2=0不使用参考点偏移功能;#3=1未回零运行G28:P/SNO.090报警;#1=1无挡块回零全轴有效,与1005#1无关)N1004 P 00000000 (#7,#1=0,最小设定和移动单位为1um或0.001deg,是-B)N1005 A1 P 00110000 A2 P 00110000 A3 P 00110000 A4 P 00110000 (#4,#5=1各轴正负方向外部减速信号对快进和工进都有效;未建立参考点自动运行#0=0,报警P/S224,#0=1,不报警,即是说不回零也可自动运行;#1=0无挡块回零无效,1002#1为0该参数设定有效)N1006 A1 P 00100000 A2 P 00000000 A3 P 00000000 A4 P 00000001 (A4,#0=1旋转轴A型,#5=0回零都为正方向) N1008 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000101 (#0=1启动旋转轴循环功能;#2=1相对坐标每转移动量取整) 绝对指令旋转方向#1=0,按距目标较近的方向,#=1,按指令符号方向。
第六讲参数详解参数在NC系统中用于设定NC数控机床及辅助设备的规格和内容,以及加工操作中所必须的一些数据。
机床厂家在制造机床、最终用户在使用的过程中,通过参数的设定,来实现对伺服驱动、加工条件、机床坐标、操作功能、数据传输等方面的设定和调用。
FANUC 0i-MA系统,也有参数设置的功能来与其强大的功能相对应。
如果参数设定错误,将对机床和NC系统产生不良的影响,故在更改参数之前,一定要清楚地了解该参数的意义及其对应的功能。
下面我们来了解一下参数的使用事项。
第一节参数的基础知识介绍一、参数画面的显示和调出在了解各个参数的定义和设定之前,必须学会如何调出参数画面。
参数的调出步骤如下:1、按MDI面板上的功能键一次或几次后,再按软键[参数]来选择参数画面。
如图6-1所示。
图6-12、参数画面有多页组成,可以用以下两种方法来显示所需参数的画面。
①用翻页键或光标移动键,显示所要查找的参数画面;②在MDI键盘上输入参数号,然后按软键[NO检索](如图6-2)。
这样可以快速找到所要参数的画面。
二、参数的分类1、FANUC 0i-MA 数控系统的参数按照数据形式大致可分为位型和字型。
其中位型又分位和位轴型,字型又分字节型、字节轴型、字型、字轴型、双字型、双字轴型8种。
轴型参数允许参数分别设定给各个控制轴。
位型参数是指对该参数的0至7这八位单独设置“0”或“1”的数据,位型参数的格式如图6-2所示。
图6-2不同数据类型的数据有效输入范围如下表所示。
数据类型 数据的有效输入范围 备注 位型 位轴型 0或1 字节型 字节轴型-128~127 0~255 有部分参数不使用符号字型 字轴型-32768~32767 0~65535 有部分参数不使用符号双字型 双字轴型-99999999~99999999 字型参数在参数画面的显示,如图6-3示。
图6-32、按照设定对象的不同,可以细分为49个类别,具体如下表。
参数类别参数号范围 “SETTING ”的参数0000~0020 RS-232-C 串口与I/O 设备进行数据传输的参数0100~0123> L 0%MDI *** *** *** 08:36:45[ NO 检索 ] [ 接通:1] [ 断开:0 ] [ +输入 ] 输入 S O []参数 (STROKE LIMIT ) 0002 N0000001320 LI MI T 1+ X 5000 Y 5000 Z 50001321 LI MI T 1- X -800000 Y -500000 Z -550000POWER MATE管理器的参数0960轴控制、单位设定的参数1001~1023 设定坐标系的参数1201~1260 存储式行程检查参数1300~1327 进给速度的参数1401~1461 加减速控制参数1601~1785 伺服的参数1800~1897 α系列AC伺服电动机参数2000~2209 DI/DO的参数3001~3033 画面显示及程序编辑参数3100~3295 编辑程序的参数3401~3460 螺距误差补偿参数3620~3624 主轴控制参数3700~4974 串行接口主轴Cs轮廓控制用参数3900~3924 α系列串行接口主轴参数4000~4351 刀具补偿用参数5001~5021 钻削固定循环参数5101~5115 螺纹切削循环参数5130多重循环参数5132~5143 小直径深孔钻削循环参数5160~5174 刚性攻螺纹参数5200~5382 缩放/坐标旋转参数5400~5421 单方向定位参数5431~5440 极坐标插补参数5450~5463 法线方向控制参数5480~5485 分度工作台分度参数5500~5512 用户宏程序参数6000~6091 图案数据输入参数6101~6110 跳步功能用参数6200~6202 刀具长度自动补偿参数6240~6255 外部数据输入、输出参数6300图形显示参数6500~6503 画面运转时间及零件数显示参数6700~6758 刀具寿命管理参数6800~6845 位置开关功能参数6901~6959 手动/自动运行参数7001手轮进给、中断参数7100~7117 挡块式参考点设定参数7181~7186 软操作面板参数7200~7399 程序再启动、加工返回再开始参数7300~7310 多边形加工参数7600~7621 PMC轴控制参数8001~8028 基本功能参数8130~8134 简易同步控制参数8301~8315顺序号可校对停止参数 8341~8342 其他一些参数 8701~8790 维修用参数 8901这么多参数一定会让你眼花。
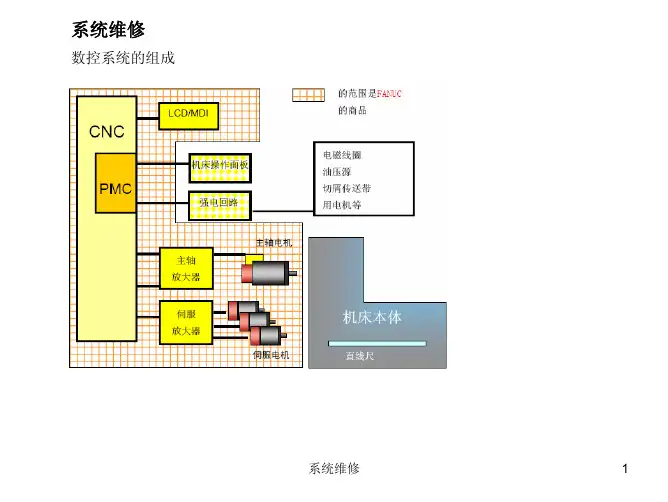
FANUC系统维修培训资料BEIJING-FANUC技术部2004.9/01EDBFM-HU01/01C第一节 FANUC CNC系统共性故障的分析1、数据输入输出接口(RS232)不能正常工作。
对于FANUC系统,当数据输入输出接口不能正常,且报警时,有两个系列的报警号。
①3/6/0/16/18/20/power-mate,当发生报警时,显示85~87报警。
②10/11/12/15,当发生报警时,显示820~823报警当数据输出接口不能正常工作时,一般有以下几个原因:1)如果做输入出数据操作时,系统没有反应。
①请检查系统工作方式对不对,请把系统工作方式置于EDIT方式且打开程序保护键,或者在输入参数时,也可以置于急停状态。
②请按FANUC出厂时数据单,重新输入功能选择参数。
③检查系统是否处于RESET状态。
2)如果做输入输出数据操作时,系统发生了报警。
①请检查系统参数下图是FANUC系统到机床面板的连接中继终端CNC侧机床面板的连接中继终端接口和电脑连接线:1.25芯(机床) 25芯(I/0设备) 2. 25芯(终端) 9芯(I/0)电脑3)外部输入输出设备的设定错误或硬件故障外部输入输出设备有FANUC 纸带穿孔机,手持磁盘盒,, FANUC P-G , 计算机等设备。
在进行传输时,要确认: a 、电源是否打开b 、波特率与停止位是否与FANUC 系统的数据输入输出参数设定匹配。
C 、硬件有何故障。
d 、传输的数据据格式是否为ISO/EIA 。
e 、数据位设定是否正确,一般为7位。
4)CNC 系统与通讯有关的印刷板下表是各系统与通讯接口有关的印刷板6)当FANUC 系统与计算机进行通讯时,要注意: a.计算机的外壳与CNC 系统同时接地。
b.不要在通电的情况下拔连接电缆。
c.不要在有雷雨时进行通讯作业。
d.通信电缆不能太长。
5)如果发生85,86,87号报警 ,请按以下步骤查找:2、电源单元不能打开FANUC系统的电源上有两个指示灯,一个是电源指示灯,是绿色的;一个是电源报警灯,是红色的,这里说的电源单元,包括电源输入单元和电源控制部分。
FANUC维修中常用参数FANUC工业机器人是世界上广泛使用的一种工业机器人,其应用领域包括汽车制造、电子制造、食品加工等众多行业。
在维修过程中,掌握常用的参数对于诊断和排除故障非常重要。
下面将介绍一些FANUC维修中常用的参数。
1.电机参数:电机参数是控制机器人运动的关键,包括电机型号、额定功率、额定转速、额定电流等。
在维修过程中,需要检查电机参数是否与设备要求一致,如果不一致,可能是电机被更换或调整了参数。
2.编码器参数:编码器用于检测电机的转动位置和速度,包括编码器型号、分辨率、信号类型等。
如果电机的位置或速度检测不准确,可能是编码器参数设置错误或编码器本身故障。
3.轴参数:FANUC机器人包含多个轴,每个轴都有相应的参数,如轴号、轴类型、轴速度、轴极限位置等。
在维修过程中,需要检查轴参数是否正确设置,特别是轴速度和轴极限位置参数。
4.机器人参数:机器人参数包括机器人型号、机器人大小(轴数)、机器人尺寸、机器人重量等。
这些参数通常与机器人机械结构相关,维修时需要检查参数是否与实际一致,特别是更换了关键部件或进行了结构调整的情况下。
5.输入/输出参数:FANUC机器人通常包含多个输入/输出(I/O)接口,用于与外部设备进行通信。
输入参数包括输入口类型、输入口状态、输入口名称等;输出参数包括输出口类型、输出口状态、输出口名称等。
在维修中,需要检查I/O参数是否正确设置,特别是与外部设备连接有关的参数。
6.伺服参数:伺服参数用于调整机器人的运动控制性能,包括位置环、速度环、电流环等。
在维修过程中,可能需要调整伺服参数以改善机器人的运动性能或解决运动不稳定的问题。
7.报警参数:FANUC机器人可以通过报警代码来指示故障原因,报警参数包括报警代码、报警消息、报警级别等。
在维修过程中,需要检查报警参数,根据报警代码和报警消息来诊断故障原因。
8.通信参数:FANUC机器人可以与上位机或其他设备进行通信,通信参数包括通信接口、通信协议、通信速率等。
第六讲参数详解参数在NC系统中用于设定NC数控机床及辅助设备的规格和内容,以及加工操作中所必须的一些数据。
机床厂家在制造机床、最终用户在使用的过程中,通过参数的设定,来实现对伺服驱动、加工条件、机床坐标、操作功能、数据传输等方面的设定和调用。
FANUC 0i-MA系统,也有参数设置的功能来与其强大的功能相对应。
如果参数设定错误,将对机床和NC系统产生不良的影响,故在更改参数之前,一定要清楚地了解该参数的意义及其对应的功能。
下面我们来了解一下参数的使用事项。
第一节参数的基础知识介绍一、参数画面的显示和调出在了解各个参数的定义和设定之前,必须学会如何调出参数画面。
参数的调出步骤如下:1、按MDI面板上的功能键一次或几次后,再按软键[参数]来选择参数画面。
如图6-1所示。
图6-12、参数画面有多页组成,可以用以下两种方法来显示所需参数的画面。
①用翻页键或光标移动键,显示所要查找的参数画面;②在MDI键盘上输入参数号,然后按软键[NO检索](如图6-2)。
这样可以快速找到所要参数的画面。
二、参数的分类1、FANUC 0i-MA 数控系统的参数按照数据形式大致可分为位型和字型。
其中位型又分位和位轴型,字型又分字节型、字节轴型、字型、字轴型、双字型、双字轴型8种。
轴型参数允许参数分别设定给各个控制轴。
位型参数是指对该参数的0至7这八位单独设置“0”或“1”的数据,位型参数的格式如图6-2所示。
图6-2不同数据类型的数据有效输入范围如下表所示。
数据类型 数据的有效输入范围 备注 位型 位轴型 0或1 字节型 字节轴型-128~127 0~255 有部分参数不使用符号字型 字轴型-32768~32767 0~65535 有部分参数不使用符号双字型 双字轴型-99999999~99999999 字型参数在参数画面的显示,如图6-3示。
图6-32、按照设定对象的不同,可以细分为49个类别,具体如下表。
参数类别参数号范围 “SETTING ”的参数0000~0020 RS-232-C 串口与I/O 设备进行数据传输的参数0100~0123> L 0%MDI *** *** *** 08:36:45[ NO 检索 ] [ 接通:1] [ 断开:0 ] [ +输入 ] 输入 S O []参数 (STROKE LIMIT ) 0002 N0000001320 LI MI T 1+ X 5000 Y 5000 Z 50001321 LI MI T 1- X -800000 Y -500000 Z -550000POWER MATE管理器的参数0960轴控制、单位设定的参数1001~1023 设定坐标系的参数1201~1260 存储式行程检查参数1300~1327 进给速度的参数1401~1461 加减速控制参数1601~1785 伺服的参数1800~1897 α系列AC伺服电动机参数2000~2209 DI/DO的参数3001~3033 画面显示及程序编辑参数3100~3295 编辑程序的参数3401~3460 螺距误差补偿参数3620~3624 主轴控制参数3700~4974 串行接口主轴Cs轮廓控制用参数3900~3924 α系列串行接口主轴参数4000~4351 刀具补偿用参数5001~5021 钻削固定循环参数5101~5115 螺纹切削循环参数5130多重循环参数5132~5143 小直径深孔钻削循环参数5160~5174 刚性攻螺纹参数5200~5382 缩放/坐标旋转参数5400~5421 单方向定位参数5431~5440 极坐标插补参数5450~5463 法线方向控制参数5480~5485 分度工作台分度参数5500~5512 用户宏程序参数6000~6091 图案数据输入参数6101~6110 跳步功能用参数6200~6202 刀具长度自动补偿参数6240~6255 外部数据输入、输出参数6300图形显示参数6500~6503 画面运转时间及零件数显示参数6700~6758 刀具寿命管理参数6800~6845 位置开关功能参数6901~6959 手动/自动运行参数7001手轮进给、中断参数7100~7117 挡块式参考点设定参数7181~7186 软操作面板参数7200~7399 程序再启动、加工返回再开始参数7300~7310 多边形加工参数7600~7621 PMC轴控制参数8001~8028 基本功能参数8130~8134 简易同步控制参数8301~8315顺序号可校对停止参数 8341~8342 其他一些参数 8701~8790 维修用参数 8901这么多参数一定会让你眼花。
在参数画面进行操作的时候,也会一时难以记起想要查看或修改参数的号码。
为方便查找参数可使用CNC 系统的帮助功能。
其使用方法如下。
①在MDI 面板上按”HELP ”键;②再按[PARAM]软键,会出现参数分类的画面; ③用翻页键来上下翻页进行查看。
三、参数的设定在进行参数设定之前,一定要清楚所要设定参数的含义和允许的数据设定范围,否则的话,机床就有被损坏的危险,甚至危及人身安全,这一点必须要注意。
1、参数的设定和修改的方法。
①将机床置于MDI 方式或紧急停止状态;②在MDI 面板上按“OFFSET SETTING ”键一次后,再按[SETTING]软键。
会显示如下画面。
③将光标移动到“参数写入”项上使“参数写入”=1,此进会出现“P/S100”报警,不用理会,可进行下面的操作;④将光标移至所需设定或修改的参数号上进行参数修改; ⑤移改完后,再将“参数写入”设为0,并按“RESET ”键; ⑥如出现“0000”报警需关机再开。
2、修改参数排除故障的实例通过以下实例来说明参数的设定和修改方法。
①实例一:开机时出现P/S 100ALARM 之排除方法 A 、模式选择钮转到手动输入(MDI );B 、压下刀补设置键 “OFFSET SETTING ”;C 、压一下“[SETTING]”软键,使荧幕以下画面;参数写入 = 0 (0:不可 1:可不可)TV 校正 = 0 (0:OFF 1:ON )PUNCH CODE = 1 (0:EIA 1:ISO )输入单位 =0 (0:MM 1:INCH )I/O 频道 =0 (035 频道NO.)顺序号 =0 (0:OFF 1:ON )磁带格式 =0 (0:无变换 1:F10/11)排序停止 =0 (程序号)( ~排序停止 =0 顺序号)> L 0%MDI *** *** *** 08:36:45[ 补正 ] [SETTING] [ 座标系 ] [ ] (操作) S O []SETTI NG (MD I ) 0002 N000000参数写入 = 1 (0:不可 1:可不可)T V 校正 = 0 (0:OFF 1:O N )P UNCH CO DE = 1 (0:EIA 1:ISO )输入单位 =0 (0:M M 1:IN CH )I /O 频道 =0 (035 频道NO.)顺序号 =0 (0:OF F 1:ON )磁带格式 =0 (0:无变换 1:F 10/11)排序停止 =0 (程序号)( ~排序停止 =0 顺序号)> L 0%MDI *** *** *** 08:36:45[ 补正 ] [SETTING] [ 座标系 ] [ ] (操作) S O []SETTI NG (MDI ) 0002 N00000D 、确认“游标”是否在参数写入=1处(此处若为1就会产生PS100ALARM );E 、按"0" 使“参数写入”=“1”改为“参数写入”=“0”;F 、压重置键 ,取消故障报警,以上即完成故障的排除。
②实例二:X 轴无法进行原点复归之故障处理当X 轴在原点复归的中途(实际机械位置并无过行程),会发生“510X 轴过行程(+X )”时,处理步骤如下:A 、将模式选择到MDI 模式,压下刀补设置键,再压下荧幕下方“[SETTING]”软键,使出现如下画面。
B 、确认“游标”位置是否在参数写入=0之处,若不在此位置时,请移动游标到参数写入=0之位置。
按“1”→INPUT ,荧幕会出现“100P/S ALARM ”之故障讯息,同时NC 异警红灯会亮起。
C 、按“CAN+RESET ”键,取消异警;D 、压一次系统键 ;E 、再压下荧幕下方[参数]键,使出现如下之画面I N PU T RE SE T 参数写入 = 0 (0:不可 1:可不可)T V 校正 = 0 (0:O F F 1:O N )P U N CH CO DE = 1 (0:EI A 1:I SO )输入单位 =0 (0:M M 1:IN CH )I /O 频道 =0 (035 频道NO.)顺序号 =0 (0:OF F 1:ON )磁带格式 =0 (0:无变换 1:F 10/11)排序停止 =0 (程序号)( ~排序停止 =0 顺序号)> L 0%MDI *** *** *** 08:36:45[ 补正 ] [SETTING] [ 座标系 ] [ ] (操作) S O []SETTING (MDI ) 0002 N000000ALARM MESSAGE 000 N 000O 20“100 P/S ALARM ”S OT ALARM MDI[ALARM][ ][ ][ ][ ]SYS TEM > L 0%MDI *** *** *** 08:36:45S O 参数 (SETTING ) 0002 N0000000000 SEQ INI ISO T VC 0 0 0 0 0 0 0 00001 F CV0 0 0 0 0 0 0 00002 SJZ RDG 0 0 0 0 0 0 0 00012 RMV MIR X 0 0 0 0 0 0 0 0 Y 0 0 0 0 0 0 0 0 Z 0 0 0 0 0 0 0 0F 、压下数字“1320”,则功能软键出现如下画面G 、按“[ NO 检索 ]”软键会出现“参数”1320之画面。
H 、确认“游标”是否停留在“1320”号“X ”之“5000”处,以免改错参数。
I 、按“999999”→“INPUT ”或按“[输入]”软键,使参数“1320”内“X ”之值由5000变成999999。
J 、模式选择钮转到“原点复归”位置,并使X 轴以较慢的速度作为原点复归。
K 、X 轴原点复归完成后,再将模式选择钮转回“手动输入”位置。
L 、按照上述之步骤,使光标停留到参数1320号“X ”之“999999”处。
M 、按以上方法将“999999”改为“5000”;将参数写入改为0。
N 、压重置键。