控制策略组态——功能块图法
- 格式:doc
- 大小:76.50 KB
- 文档页数:12

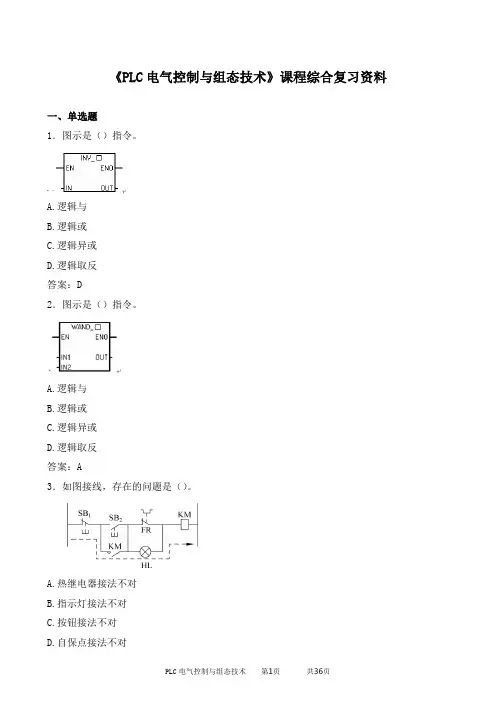
《PLC电气控制与组态技术》课程综合复习资料一、单选题1.图示是()指令。
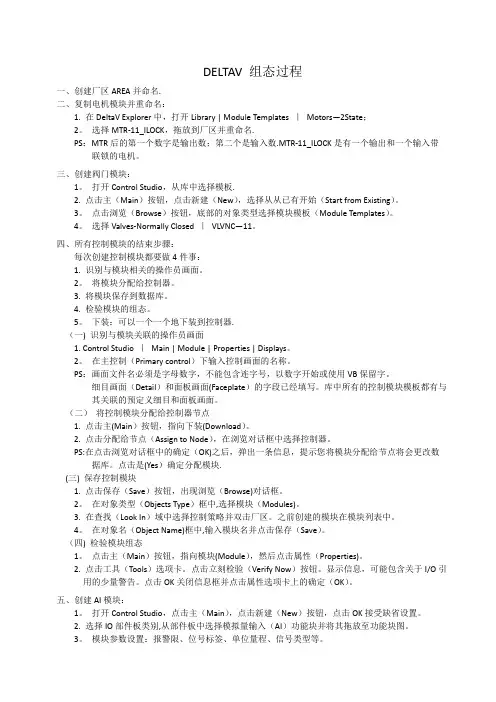
A.逻辑与B.逻辑或C.逻辑异或D.逻辑取反答案:D2.图示是()指令。
A.逻辑与B.逻辑或C.逻辑异或D.逻辑取反答案:A3.如图接线,存在的问题是()。
A.热继电器接法不对B.指示灯接法不对C.按钮接法不对D.自保点接法不对答案:B4.符号代表()。
A.通电延时闭合触点B.通电延时断开触点C.断电延时闭合触点D.断电延时断开触点答案:D5.图示为交流接触器线圈接线图,其最显著的错误是()。
A.没用按钮控制B.接触器线圈不能串联C.没用热继电器D.没用熔断器答案:B6.图示是()。
A.使能高速计数器指令B.使能脉冲输出指令C.定义高速计数器指令D.定义脉冲输出指令答案:A7.图示是()。
A.使能高速计数器指令B.使能脉冲输出指令C.定义高速计数器指令D.定义脉冲输出指令答案:B8.图示是()指令。
A.整数加法指令B.整数减法指令C.双整数加法指令D.双整数减法指令答案:B9.图示是()。
A.实数加法运算指令B.实数减法运算指令C.实数乘法运算指令D.实数除法运算指令答案:A10.当几个条件仅具备一个时,继电器线圈就断电,可采用将几个条件对应的常闭触头()、再和所控制的继电器线圈串联的方法实现。
A.并联B.串联C.先串联再并联D.先并联再串联答案:B11.CPU224AC/DC/Relay表示型号为224、交流电源供电、直流型输入接口电路、()输出接口电路。
A.继电器型B.晶体管型C.晶闸管型答案:A12.在进行继电接触控制电路设计时,当触点动作时刻先后非常接近时,要特别注意“()”会导致控制次序颠倒,控制失败。
幸运的是,可编程控制器的“循环扫描”工作方式,可有效的避免这种情况。
A.短路B.触点竞争C.触点黏连D.操作过电压答案:B13.对于TON定时器,当定时时间到,即当达到设定值后,若控制端子(使能端)仍然接通,则定时器的当前值会()。

DELTAV 组态过程一、创建厂区AREA并命名.二、复制电机模块并重命名:1. 在DeltaV Explorer中,打开Library | Module Templates |Motors—2State;2。
选择MTR-11_ILOCK,拖放到厂区并重命名.PS:MTR后的第一个数字是输出数;第二个是输入数.MTR-11_ILOCK是有一个输出和一个输入带联锁的电机。
三、创建阀门模块:1。
打开Control Studio,从库中选择模板.2. 点击主(Main)按钮,点击新建(New),选择从从已有开始(Start from Existing)。
3。
点击浏览(Browse)按钮,底部的对象类型选择模块模板(Module Templates)。
4。
选择Valves-Normally Closed |VLVNC—11。
四、所有控制模块的结束步骤:每次创建控制模块都要做4件事:1. 识别与模块相关的操作员画面。
2。
将模块分配给控制器。
3. 将模块保存到数据库。
4. 检验模块的组态。
5。
下装:可以一个一个地下装到控制器.(一) 识别与模块关联的操作员画面1. Control Studio |Main | Module | Properties | Displays。
2。
在主控制(Primary control)下输入控制画面的名称。
PS:画面文件名必须是字母数字,不能包含连字号,以数字开始或使用VB保留字。
细目画面(Detail)和面板画面(Faceplate)的字段已经填写。
库中所有的控制模块模板都有与其关联的预定义细目和面板画面。
(二)将控制模块分配给控制器节点1. 点击主(Main)按钮,指向下装(Download)。
2. 点击分配给节点(Assign to Node),在浏览对话框中选择控制器。
PS:在点击浏览对话框中的确定(OK)之后,弹出一条信息,提示您将模块分配给节点将会更改数据库。
点击是(Yes)确定分配模块.(三) 保存控制模块1. 点击保存(Save)按钮,出现浏览(Browse)对话框。

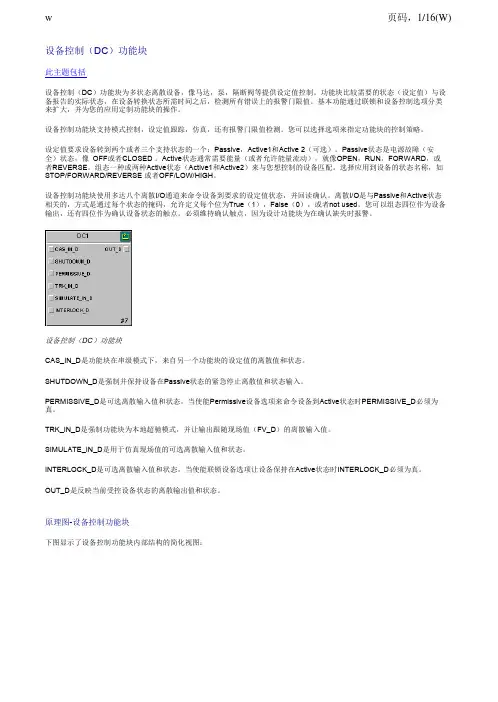
设备控制(DC)功能块此主题包括设备控制(DC)功能块为多状态离散设备,像马达,泵,隔断阀等提供设定值控制。
功能块比较需要的状态(设定值)与设备报告的实际状态,在设备转换状态所需时间之后,检测所有错误上的报警门限值。
基本功能通过联锁和设备控制选项分类来扩大,并为您的应用定制功能块的操作。
设备控制功能块支持模式控制,设定值跟踪,仿真,还有报警门限值检测。
您可以选择选项来指定功能块的控制策略。
设定值要求设备转到两个或者三个支持状态的一个:Passive,Active1和Active 2(可选)。
Passive状态是电源故障(安全)状态,像OFF或者CLOSED。
Active状态通常需要能量(或者允许能量流动),就像OPEN,RUN,FORWARD,或者REVERSE。
组态一种或两种Active状态(Active1和Active2)来与您想控制的设备匹配。
选择应用到设备的状态名称,如STOP/FORWARD/REVERSE或者OFF/LOW/HIGH。
设备控制功能块使用多达八个离散I/O通道来命令设备到要求的设定值状态,并回读确认。
离散I/O是与Passive和Active状态相关的,方式是通过每个状态的掩码,允许定义每个位为True(1),False(0),或者not used。
您可以组态四位作为设备输出,还有四位作为确认设备状态的触点。
必须维持确认触点,因为设计功能块为在确认缺失时报警。
设备控制(DC)功能块CAS_IN_D是功能块在串级模式下,来自另一个功能块的设定值的离散值和状态。
SHUTDOWN_D是强制并保持设备在Passive状态的紧急停止离散值和状态输入。
PERMISSIVE_D是可选离散输入值和状态,当使能Permissive设备选项来命令设备到Active状态时PERMISSIVE_D必须为真。
TRK_IN_D是强制功能块为本地超驰模式,并让输出跟随现场值(FV_D)的离散输入值。
DCS控制器中的功能块DCS不仅能完成原来模拟仪表的功能,而且大大超过模拟仪表。
这是因为它采用了先进的计算机技术、通讯技术、CRT技术和控制技术等4C技术.采用数字控制以后,控制器中预先存到ROM中的算法可以说是无限的,每一种算法代表一种功能。
这些功能在模拟仪表中是用模拟线路来实现的,它受到模拟线路的漂移、电阻、电容等器件的限制,作一个精度很高的模拟仪表成本很高,甚至几乎是不可能的。
而数字控制的算法是用程序实现的。
用程序来代替模拟线路所能实现的功能。
在理论上是无限的,这是很大的进步。
对于各种DCS系统其原理都是一样的。
通常称各种算法为功能块。
功能块的总成称为功能块库。
DCS的控制器主要是由CPU、ROM、RAM、E2PROM、地址设定开关等组成。
CPU完成运算,ROM用来存操作系统、功能块库,功能块在ROM中的排列是确定的,用户是不能改变的。
RAM用来存CPU的运算结果和I/O信号。
E2 PROM存用功能块连成的控制方案。
下电时,控制方案是不会丢失的。
不仅如此,控制方案不合适,还可以修改。
修改采用紫外线照射,抹去E2PROM中的内容。
控制器在网络中应该有地址,由这些地址开关来设定。
功能块在R OM中的排列有的DCS称这种排列为功能码。
码的次序就是功能块在库中的地址。
各种厂家的DCS对运算算法的处理有些差异,所以名称也不一样。
如有的DCS称这些算法为内部仪表,但其实质都是一段程序,本质是一样的。
在运用这些功能块时,应该标明该功能块输入输出之间运算的关系,还有运算所需要的许多参数。
在用户根据被控对象,确定控制策略形成控制方案时,在功能块库中选择控制用所需要的功能块,弄清各功能块之间的联接关系,并首先定义它在E2PROM中的地址,和其它功能块的联系也都是用地址来表示的。
同时填入所需参数。
这些工作称为组态,这是为了区别于用语言编程。
组态时,可以用作图的方式,即CAD方式。
作CAD有一个软件,可以画出每一个控制回路所需的功能块以及它们之间的连接关系。
仪表维修工(高级技师)职业技能鉴定理论知识试题一、判断题1、企业综合自动化包括生产过程自动化和企业管理信息化。
(√)2、CENTUM-CS分散控制系统,是由工程师站EWC、信息指令站ICS(操作站)、现场控制站AFM20D、通讯门单元ACG和双重化通讯网络V-NET构成。
(√)3、CENTUM—CS系统具有开放性、高可靠性、三重网络和综合性强的特点。
(√)4、TPS是Total Plant Solutions System 的简称,中文为“全厂一体化解决方案”。
(√)5、TPS系统中的网络类型有工厂控制网络、TPS过程网络和过程控制网络三种形式。
(√)6、TPS系统是横河电机(中国)有限公司的产品。
(Ⅹ)7、DeltaV分散控制系统是上海福克斯有限公司的产品。
(Ⅹ)8、现场总线是一种将智能化的现场设备与控制装置之间实现双向、串行、多节点数字通讯链路系统。
(√)9、FCS是Field control system 的缩写,中文称现场总线控制系统。
(√)10、现场总线适应了工业控制系统向数字化、分散化、网络化、智能化发展方向发展。
(√)11、OPC数据存取规范是OPC基金会最初制定的一个工业标准,其重点是对现场设备历史数据进行存取。
(Ⅹ)12、OPC是基于分布式COM(DCOM)的技术。
(Ⅹ)13、OPC报警事件规范提供了一种通知机制,即在指定事件或报警条件发生时OPC服务器能够主动通知客户程序。
(√)14、逻辑代数中有3种最基本的函数运算关系,它们是与运算、或运算、非运算。
(√)15、系统软件是指管理、控制和维护计算机及外部设备,提供用户与计算机之间界面的软件。
(√)16、应用软件是指专门为解决某个应用领域内的具体问题而编制的软件(或实用程序)(√)17、网络协议是通信双方事先约定的通信的语义和语法规则的集合。
(√)18、网络协议的三个要素是:语法、语义和定时。
(√)19、神经网络既善于显示表达知识,又具有很强的逼近非线性函数的能力。
VisualField系统软件功能块图编程软件使用手册浙江中控技术股份有限公司声明1.严禁转载本手册的部分或全部内容。
2.在不经预告和联系的情况下,本手册的内容有可能发生变更,请谅解。
3.本手册所记载的内容,不排除有误记或遗漏的可能性。
如对本手册内容有疑问,请与我公司联系。
文档标志符定义警告:标示有可能导致人身伤亡或设备损坏的信息。
WARNING: Indicates information that a potentially hazardous situation which, if not avoided,could result in serious injury or death.电击危险:标示有可能产生电击危险的信息。
Risk of electrical shock: Indicates information that Potential shock hazard where HAZARDOUSLIVE voltages greater than 30V RMS, 42.4V peak, or 60V DC may be accessible.防止静电:标示防止静电损坏设备的信息。
ESD HAZARD: Indicates information that Danger of an electro-static discharge to whichequipment may be sensitive. Observe precautions for handling electrostatic sensitive devices注意:提醒需要特别注意的信息。
ATTENTION: Identifies information that requires special consideration.提示:标记对用户的建议或提示。
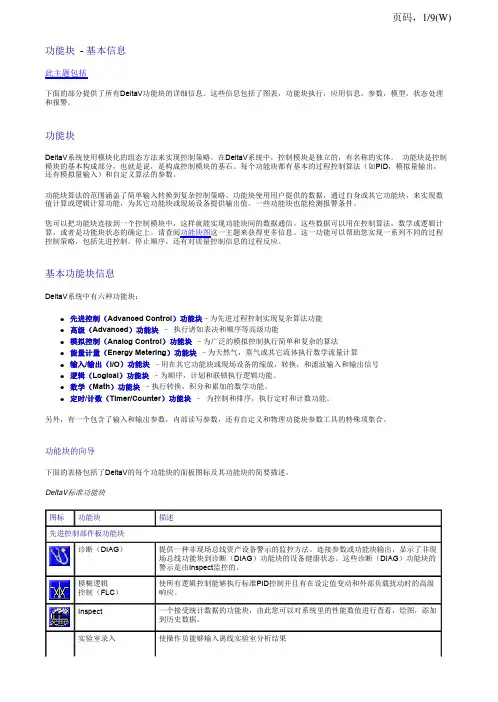
TIP:Identifies advice or hints for the user.目录1 概述 (1)1.1 软件特点 (1)1.2 功能特点 (1)2 组态步骤 (2)3 新建FBD程序 (3)3.1 设置FBD程序属性 (3)3.2 设置FBD程序密码 (4)3.3 FBD程序属性说明 (5)4 界面介绍 (5)4.1 主界面 (5)4.2 菜单/工具栏命令 (6)4.3 信息栏 (7)4.4 右键菜单 (7)5 编程说明 (8)5.1 数据类型 (8)5.2 程序基本元素 (8)5.2.1 数据引用 (8)5.2.2 通用功能块 (9)5.2.3 全局功能块 (9)6 编写FBD程序 (10)6.1 数据引用 (10)6.1.1 添加数据引用 (10)6.1.2 位号链接方法 (10)6.1.3 删除数据引用的方法 (11)6.1.4 位号更新提示 (12)6.2 功能块 (12)6.2.1 数据准备 (12)6.2.2 添加功能块 (13)6.2.3 设置功能块基本属性 (14)6.2.4 设置功能块参数 (22)6.2.5 设置功能块的执行顺序 (25)6.2.6 ST混编及举例(可选) (26)6.2.7 设置功能块的别名参数(可选) (28)6.2.8 无效功能块及其自动升级(可选) (29)6.3 连线 (30)6.3.1 连接功能块 (30)6.3.2 设置连线为特殊线 (30)6.3.3 设置联系为普通线 (30)6.4 编译 (31)6.5 联机调试 (31)6.5.1 程序调试 (31)6.5.2 功能块调试 (32)6.5.3 变量调试 (33)6.5.4 保存功能块实时值 (34)7 其它操作与提示 (37)7.1.1 对象移动和缩放 (37)7.1.2 设置打印属性 (37)7.1.3 设置画布属性 (37)7.1.4 查看全局功能块的逻辑 (38)7.1.5 导入/导出 (38)7.1.6 功能块实例监控参数更新 (39)7.1.7 删除 (39)7.1.8 报警优先设置 (39)8 资料版本说明 (40)功能块图编程软件1概述功能块图(FBD)编程软件(VFFBDBuilder)是控制系统中最主要的控制策略组态工具之一,提供FBD编程和调试功能。
什么是plc的功能块图编程 功能块图用来描述功能、功能块和程序的行为特征,还可以在顺序功能流程图中描述步、动作和转变的行为特征。
功能块图与电子线路图中的信号流图非常相似,在程序中,它可看做两个过程元素之间的信息流。
功能块图普遍地应用在过程控制领域。
功能块用矩形块来表示,每个功能块的左侧都有不少于一个的输入端,在右侧有不少于一个的输出端。
功能块的类型名称通常写在块内,但功能块实例的名称通常写在块的上部,功能块的输入、输出名称写在块内输入、输出点的相应地方。
1)功能块图的信号流 在功能块网络中,信号通常是从一个功能或功能块的输出传递到另一个功能或功能块的输入。
信号经由功能块左端流入,并求值更新,在功能块右端流出。
布尔信号的取反:在使用布尔信号时,功能或功能块的取反输入或输出可以在输入端或输出端用一个小圆点来表示,这种表示与在输入端或输出端加一个“取反”功能是一致的。
信号反馈:功能块图允许功能块的输出反馈回网络左侧的功能块输入,形成反馈路径。
2)功能块网络设计 功能块图的设计首先应该保证主信号流的线路清晰,避免过多的信号跨接和线路方向改变。
3)功能的执行控制 功能块图网络中的功能执行控制隐含地从各功能所处的位置中表现出来。
5知识库5-0变量与常数知识库共使用三类变量和两类常数。
三类变量为:整型变量,实型变量和布尔(逻辑)型变量。
两类常数为:整型常数和实型常数。
5-0-1整型变量整型变量由四位16进制数组成。
其中第一(最高)位=8用于表示整型变量;第二、三、四位为整型变量的序号。
整型变量本身的取值范围:0~4095。
整型变量所描述数据的取值范围:0~65535(无符号数据)或-32768~32767(有符号数据)。
5-0-2整型常数整型常数由六位16进制数组成。
其中第一(最高)位和第二位=90用于表示整型常数;第三、四、五、六位为整型常数值。
整型常数的取值范围:0~65535(无符号数据)或-32768~32767(有符号数据)。
5-0-3实型变量实型变量由四位16进制数组成。
其中第一(最高)位=A用于表示实型变量;第二、三、四位为实型变量的序号。
实型变量本身的取值范围:0~4095。
实型变量所描述数据的取值范围:IEEE浮点格式。
5-0-4实型常数实型常数由十位16进制数组成。
其中第一(最高)位和第二位=B0用于表示实型常数;第三至十位为实型常数值。
实型常数的取值范围:IEEE浮点格式。
5-0-5布尔(逻辑)型变量布尔(逻辑)型变量由六位16进制数组成。
其中第一(最高)位和第二位=C0用于表示布尔(逻辑)型变量;第三位用于表示布尔量在整型变量中所处位置(0~F);第四、五、六位为整型变量的序号。
布尔(逻辑)型变量的取值范围:假(=0)、真(=1)。
5-0-6布尔(逻辑)型常数布尔(逻辑)型常数由二位16进制数组成。
其中第一(最高)位和第二位=D1表示“真”,D0表示“假”。
5-0-7 IEEE浮点格式IEEE浮点格式数据由四个字节组成。
其中第一字节的最高位(bit31)表示阶码符号,第一字节的次高位(bit30)~最低位(bit24)联合表示阶码,第二字节的最高位(bit23)表示数据符号,第二字节的次高位(bit22)为尾数的最高有效位,bit22~bit0表示尾数。
例1:用IEEE浮点格式表示整数3。
解答:03 60 00 00。
5-0-8 IBM浮点格式IBM浮点格式数据由四个字节组成。
其中第一字节的最高位(bit31)表示阶码符号,第一字节的次高位(bit30)~最低位(bit24)联合表示阶码,第二字节的最高位(bit23)表示数据符号,bit22~bit0表示除最高有效位外尾数的其余部分。
在IBM浮点格式数据中,尾数的最高有效位被省略。
例1:用IBM浮点格式表示整数3。
解答:02 40 00 00。
5-1加运算(T01KH)代码:01(+),A,B,C;功能:双目算术运算;说明:当第一操作数A为整型时,第二操作数B也必须为整型,和C 为整型;当第一操作数A为实型时,第二操作数B也必须为实型,和C为实型。
5-2减运算(T02KH)代码:02(—),A,B,C;功能:双目算术运算;说明:当第一操作数A为整型时,第二操作数B也必须为整型,差C 为整型;当第一操作数A为实型时,第二操作数B也必须为实型,差C为实型。
5-3乘运算(T03KH)代码:03(×),A,B,C;功能:双目算术运算;说明:第一、二操作数A,B必须为实型,积C为实型。
5-4除运算(T04KH)代码:04(÷),A,B,C;功能:双目算术运算;说明:第一、二操作数A,B必须为实型,商C为实型。
5-5赋值运算(T05KH)代码:05(=),A,B;功能:赋值运算(兼类型转换);说明:1:当源操作数A为整型,目的操作数B亦为整型时,直接将A赋给B;2:当源操作数A为整型,目的操作数B为实型时,先将A转换成实型,再将A赋B;3:当源操作数A为实型,目的操作数B亦为实型时,直接将A赋B;4:当源操作数A为实型,目的操作数B为整型时,先将A转换成整型,再将A赋B。
5:当源操作数A为逻辑型,目的操作数B必须为逻辑型,将A赋B。
5-6“大于”关系运算(T06KH)代码:06(>),A,B,C;功能:“大于”关系运算(1=真,0=假);说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型;当第一操作数A为实型时,第二操作数B也必须为实型;结果C为逻辑型变量(1=真,0=假)。
5-7“大于等于”关系运算(T07KH)代码:07(>=),A,B,C;功能:“大于等于”关系运算(1=真,0=假);说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型;当第一操作数A为实型时,第二操作数B也必须为实型;结果C为逻辑型(1=真,0=假)。
5-8“等于”关系运算(T08KH)代码:08(==),A,B,C;功能:“等于”关系运算(1=真,0=假);说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型;当第一操作数A为实型时,第二操作数B也必须为实型;结果C为逻辑型(1=真,0=假)。
5-9“不等于”关系运算(T09KH)代码:09(<>),A,B,C;功能:“不等于”关系运算(1=真,0=假);说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型;当第一操作数A为实型时,第二操作数B也必须为实型;结果C为逻辑型(1=真,0=假)。
5-10“小于等于”关系运算(T0AKH)代码:0A(=<),A,B,C;功能:“小于等于”关系运算(1=真,0=假);说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型;当第一操作数A为实型时,第二操作数B也必须为实型;结果C为逻辑型(1=真,0=假)。
5-11“小于”关系运算(T0BKH)代码:0B(<),A,B,C;功能:“小于”关系运算(1=真,0=假);说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型;当第一操作数A为实型时,第二操作数B也必须为实型;结果C为逻辑型(1=真,0=假)。
5-12逻辑“与”运算(T0CKH)代码:0C(∩),A,B,C;功能:对两整型或两逻辑型操作数实现按位逻辑“与”运算;说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型,结果C为整型;当第一操作数A为逻辑型时,第二操作数B也必须为逻辑型;结果C为逻辑型(1=真,0=假)。
5-13逻辑“或”运算(T0DKH)代码:0D(∪),A,B,C;功能:对两整型或两逻辑型操作数实现按位逻辑“或”运算;说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型,结果C为整型;当第一操作数A为逻辑型时,第二操作数B也必须为逻辑型;结果C为逻辑型(1=真,0=假)。
5-14逻辑“非”运算(T0EKH)代码:0E(-),A,C;功能:对单整型操作数实现按位逻辑“非”运算;说明:单目运算,当操作数A为整型时,结果C为整型;当操作数A 为逻辑型时,结果C为逻辑型(1=真,0=假)。
5-15逻辑“异或”运算(T0FKH)代码:0F(⊙),A,B,C;功能:对两整型或两逻辑型操作数实现按位逻辑“异或”运算;说明:双目运算,当第一操作数A为整型时,第二操作数B也必须为整型,结果C为整型;当第一操作数A为逻辑型时,第二操作数B也必须为逻辑型;结果C为逻辑型(1=真,0=假)。
5-16 IF运算(T10KH)代码:10(IF),A,B;功能:软件流程控制。
IF+逻辑型变量A+偏移量B,当逻辑型变量为假(=0)时,流程跳过偏移量;说明:操作数A必须为逻辑型,偏移量B取值范围:-32768~32767。
5-17 ELSE运算(T11KH)代码:11(ELSE),A,B;功能:软件流程控制。
ELSE+逻辑变量+偏移量,当逻辑型变量为真(=1)时,流程跳过偏移量;说明:操作数A必须为逻辑型,偏移量B取值范围:-32768~32767。
5-18 WHILE运算(T12KH)代码:12(WHILE),A,B;功能:软件流程控制。
WHILE+逻辑型变量+偏移量,当逻辑型变量为假(=0)时,程序跳过偏移量B;说明:操作数A必须为逻辑型,偏移量B取值范围:-32768~32767。
5-19 WHILE END运算(T13KH)代码:13(WHILE END),B;功能:软件流程控制。
程序跳过偏移量B;说明:偏移量取值范围:-32768~32767。
5-20平方根运算(T14KH)代码:14(√),A,B;功能:平方根计算;说明:操作数A必须为实型,结果B为实型。
5-21 10的指数幂运算(T15KH)代码:15(POWER),A,B;功能:10的指数幂计算;说明:操作数A必须为实型,范围为0~7.9999,结果B为实型。
5-22上升沿触发微分运算(T16KH)代码:16(DIFU),A,B;功能:当且仅当逻辑变量A从“0”到“1”跳变时B为真(持续到DIFU 再一次被执行);说明:操作数A为逻辑型变量,结果B为逻辑型变量。
5-23下降沿触发微分运算(T17KH)代码:17(DIFD),A,B;功能:当且仅当逻辑变量A从“1”到“0”跳变时B为真(持续到DIFD 再一次被执行);说明:操作数A为逻辑型变量,结果B为逻辑型变量。
5-24 100毫秒定时器运算(T18KH)代码:18(TIMEA),A,B,C,D;功能:实现1~255个0.1秒的有条件定时;1:定时条件为假时,TIMEA停止定时,输出为假;2:定时条件为真时,若TIMEA处于停止定时状态,则装入定时常数,正式启动定时器,输出为假;3:定时条件为真时,若TIMEA处于定时进行中状态,则保持定时工作状态,输出为假;4:定时条件为真时,若TIMEA处于定时完成状态,则输出为真(持续到TIMEA再一次被执行)。
说明:1:操作数A为逻辑型变量,指示定时条件;2:操作数B为整型常数,表示定时器序号(0~127);3:操作数C为整型常数或整型变量,表示定时常数(1~255个0.1秒);4:操作数D为逻辑型变量,指示定时器输出状态。
5-25秒定时器运算(T19KH)代码:19 (TIMEB),A,B,C,D;功能:实现1~255个1秒的有条件定时;其它参考TIMEA。
5-26分定时器运算(T1AKH)代码:1A(TIMEC),A,B,C,D;功能:实现1~255个1分钟的有条件定时;其它参考TIMEA。
5-27单向计数运算(T1BKH)代码:1B(CNT),A,B,C,D,E;功能:CNT是具有清除控制的单向计数器,当且仅当计数到时,CNT 输出为真(=1),并且持续到CNT再一次被执行;CNT为真后,当计数条件B为真(=1)时,CNT自动装入计数常数。
说明:1:操作数A为逻辑型变量,用于清除控制;2:操作数B为逻辑型变量,用于计数控制;3:操作数C为整型变量或整型常数,用于计数器初值;4:操作数D占两个字节(=FFFF);5:操作数E为逻辑型变量,指示计数器输出状态。