理论力学课后习题第二章思考题答案
- 格式:docx
- 大小:27.14 KB
- 文档页数:3

第一章 质点力学矿山升降机作加速度运动时,其变加速度可用下式表示:⎪⎭⎫ ⎝⎛-=T t c a 2sin1π 式中c 及T 为常数,试求运动开始t 秒后升降机的速度及其所走过的路程。
已知升降机的初速度为零。
解 :由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin1π 由加速度的微分形式我们可知dtdv a =代入得 dt T t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫⎝⎛-=002sin 1π 可得 :D T t c T ct v ++=2cos 2ππ(D 为常数)代入初始条件:0=t 时,0=v , 故c T D π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos 2T t T t c v ππ 又因为dtds v =所以 =ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos 2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ 直线FM 在一给定的椭圆平面内以匀角速ω绕其焦点F 转动。
求此直线与椭圆的焦点M 的速度。
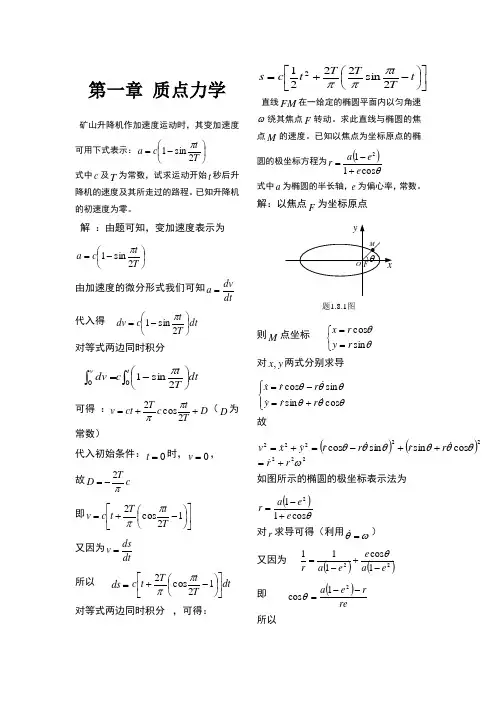
已知以焦点为坐标原点的椭圆的极坐标方程为()θcos 112e e a r +-=式中a 为椭圆的半长轴,e 为偏心率,常数。
解:以焦点F 为坐标原点题1.8.1图则M 点坐标 ⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= ) 又因为()()221cos 111ea e e a r -+-=θ即 ()rer e a --=21cos θ所以()()2222222221211cos 1sin e r e ar r ea --+--=-=θθ故有 ()2222224222sin 1ωθωr e a r e v +-=()2224221e a r e -=ω()()]1211[2222222e r e ar r e a --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω即 ()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)质点作平面运动,其速率保持为常数。
第一章 质点力学矿山升降机作加速度运动时,其变加速度可用下式表示:⎪⎭⎫ ⎝⎛-=T t c a 2sin1π 式中c 及T 为常数,试求运动开始t 秒后升降机的速度及其所走过的路程。
已知升降机的初速度为零。
解 :由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin1π 由加速度的微分形式我们可知dtdv a =代入得 dt T t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫⎝⎛-=002sin 1π 可得 :D T t c T ct v ++=2cos 2ππ(D 为常数)代入初始条件:0=t 时,0=v , 故c T D π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos 2T t T t c v ππ 又因为dtds v =所以 =ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos 2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ 直线FM 在一给定的椭圆平面内以匀角速ω绕其焦点F 转动。
求此直线与椭圆的焦点M 的速度。
已知以焦点为坐标原点的椭圆的极坐标方程为()θcos 112e e a r +-=式中a 为椭圆的半长轴,e 为偏心率,常数。
解:以焦点F 为坐标原点题1.8.1图则M 点坐标 ⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= ) 又因为()()221cos 111ea e e a r -+-=θ即 ()rer e a --=21cos θ所以()()2222222221211cos 1sin e r e ar r ea --+--=-=θθ故有 ()2222224222sin 1ωθωr e a r e v +-=()2224221e a r e -=ω()()]1211[2222222e r e ar r e a --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω即 ()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)质点作平面运动,其速率保持为常数。
图s2.3第二章 刚体运动学思2.1 答:0R θ=-=A C υυi ,并不能说明0=A a 。
因为0R θ=-=A C υυi 所表示的A υ是A 在一定特定位置,即与地面接触点时的速度,下一时刻与地面的接触点就换为别的质点了,所以不是同一质点速度的表达式。
若要通过对υ求时间的导数去求A a ,必须先将A υ表示成时间的函数式()t A υ,()()d d t t t=A A υa ,然后将在与地面接触时的时刻t 代入()t A a ,才能求得A a 。
思2.2 答:对R θυ=并不能求得R a θ=。
因为按加速度定义=a υ,应该是对速度矢量求导得加速度矢量。
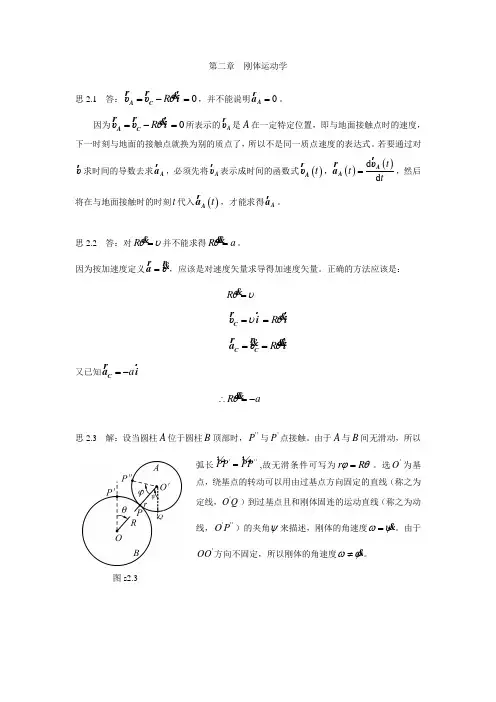
正确的方法应该是:R θυ=R υθ==C υi iR θ==C C a υi又已知a =-C a iR a θ∴=-思2.3 解:设当圆柱A 位于圆柱B 顶部时,''P 与'P 点接触。
由于A 与B 间无滑动,所以弧长'''PP PP =,故无滑条件可写为r R ϕθ=。
选'O 为基点,绕基点的转动可以用由过基点方向固定的直线(称之为定线,'OQ )到过基点且和刚体固连的运动直线(称之为动线,'''O P )的夹角ψ来描述,刚体的角速度ωψ=。
由于'OO 方向不固定,所以刚体的角速度ωϕ≠。
思2.4 答:以瞬心为基点,设作为瞬心的那个点(基点)的瞬时加速度为0a ,则刚体上任一点的加速度为:20r r ωω=++n t a a e e思2.5 答:定点运动中的定点应是与刚体固连(可在刚体之外)且固定不动的点。
由于B 点不是与刚体固连的点,所以B 点不是定点。
根据瞬时轴的定义,因为B 点与刚体不固连,故BQ 和OB 均不是瞬时轴。
思2.6 答:解题时根据题目要求选择参考系,再根据具体情况建立适当的静止和运动坐标系。
例题3中选择地面做参考系,并在地面参考系中写出了相应的矢量表达式,只是为了计算方便才选择了动坐标系做矢量投影,所以P υ和P a 均是相对水平面的速度和加速度。
力系的简化第二章,的力F,5)两点(长度单位为米),且由A指向B.通过A(3,0,0),B(0,42-1 。
,对z轴的矩的大小为在z轴上投影为22 /5。
答:F / ;6 F上和y,c,则力F在轴z2-2.已知力F的大小,角度φ和θ,以及长方体的边长a,b的矩x ;F对轴;Fy= 的投影:Fz=F 。
)= M ( x)··()(··;-··;cos=FFz=F答:φsinφbFy=θFsincosφφcosφ+cMxFcos41-图2 图2-40F,则该力,若F=100N,4)两点(长度单位为米)),B(0,2-3.力4通过A(3,4、0 。
,对x轴的矩为在x轴上的投影为320N.m;答:-60NAE内有沿对角线,在平面ABED2-4.正三棱柱的底面为等腰三角形,已知OA=OB=a °,则此力对各坐标轴之矩为:α=30的一个力F,图中。
)= );M(F= ((MF)= ;MF zYx6Fa/4 =(F);M)=0,(F)=-Fa/2MF答:M(zxy2-5.已知力F的大小为60(N),则力F对x轴的矩为;对z轴的矩为。
答:M(F)=160 N·cm;M(F)=100 N·cmzx43-图2 2图-42O2-6.试求图示中力F对点的矩。
M(F)=Flsinα解:a: O M(F)=Flsinαb: Oα+ Flcos)sinc: M(F)=F(l+lα2O13??22?lM?Fl?Fsin d: 2o1。
轴的力矩M1000N2-7.图示力F=,求对于z z图题2-8 7题2-图。
试求=40N,M=30N·m=40N2-8.在图示平面力系中,已知:F=10N,F,F321其合力,并画在图上(图中长度单位为米)。
解:将力系向O点简化=30N F=F-R12X40N -=R=-F3V R=50N ∴m )··3+M=300N+FF主矩:Mo=(+F312d=Mo/R=6mO合力的作用线至点的矩离iiRR0.8-=),(cos,=0.6),(cos合力的方向:iR )=-53,°08'(iR ,')(=143°08,内作用一力偶,其矩M=50KNGA转向如图;又沿·m,2-9.在图示正方体的表面ABFE2RR =50。
理论⼒学思考题习题答案第⼀章质点⼒学矿⼭升降机作加速度运动时,其变加速度可⽤下式表⽰:?-=T t c a 2sin1π式中c 及T 为常数,试求运动开始t 秒后升降机的速度及其所⾛过的路程。
已知升降机的初速度为零。
解:由题可知,变加速度表⽰为-=T t c a 2sin1π由加速度的微分形式我们可知dtdv a =代⼊得 dt T t c dv ??? ??-=2sin 1π对等式两边同时积分dt T t c dv t v-=002sin 1π可得:D T t c T ct v ++=2cos 2ππ(D 为常数)代⼊初始条件:0=t 时,0=v ,故c T D π2-=即??-+=12cos 2T t T t c v ππ⼜因为dtds v =所以 =ds dt T t T t c??-+12cos 2ππ对等式两边同时积分,可得:ω绕其焦点F 转动。
求此直线与椭圆的焦点M 的速度。
已知以焦点为坐标原点的椭圆的极坐标⽅程为()θcos 112e e a r +-=式中a 为椭圆的半长轴,e 为偏⼼率,常数。
解:以焦点F 为坐标原点题1.8.1图则M 点坐标 ??==θθsin cos r y r x 对y x ,两式分别求导+=-=θθθθθθcos sin sin cos &&&&&&r r yr r x 故()()22222cos sin sin cos θθθθθθ&&&&&&r r r r y x v ++-=+=222ωr r +=&如图所⽰的椭圆的极坐标表⽰法为()θcos 112e e a r +-=对r 求导可得(利⽤ωθ=&)⼜因为()()221cos 111ea e e a r -+-=θ即 ()rer e a --=21cos θ所以()()2222221211cos 1sin e r e ar r ea --+--=-=θθ故有 ()2222224222sin 1ωθωr e a r e v +-=()2224221e a r e -=ω()()]1211[2222222e r e ar r e a --+--22ωr +()()??--+-?-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω即 ()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)质点作平⾯运动,其速率保持为常数。
第一章 质点力学1.1平均速度与瞬时速度有何不同?在上面情况下,它们一致?1.2 在极坐标系中,r v r =,θθ r v =.为什么2θ r r a r -=而非r ?为什么θθr r a 20+=而非θθr r +?你能说出r a 中的2θ r -和θa 中另一个θ r 出现的原因和它们的物理意义吗? 1.3 在内禀方程中,n a 是怎样产生的?为什么在空间曲线中它总沿着主法线方向?当质点沿空间运动时,副法线方向的加速度b a 等于零,而作用力在副法线方向的分量b F 一般不等于零,这是不是违背了牛顿运动定律呢?1.4 在怎样的运动中只有τa 而无n a ?在怎样的运动中又只有n a 而无τa ?在怎样的运动中既有n a 而无τa ?1.5dtr d与dtdr 有无不同?dtv d 与dtdv 有无不同?试就直线运动与曲线运动分别加以讨论.1.6人以速度v 向篮球网前进,则当其投篮时应用什么角度投出?跟静止时投篮有何不同?1.7雨点以匀速度v 落下,在一有加速度a 的火车中看,它走什么路经?1.8某人以一定的功率划船,逆流而上.当船经过一桥时,船上的渔竿不慎落入河中.两分钟后,此人才发现,立即返棹追赶.追到渔竿之处是在桥的下游600米的地方,问河水的流速是多大? 1.9物体运动的速度是否总是和所受的外力的方向一致?为什么?1.10在那些条件下,物体可以作直线运动?如果初速度的方向和力的方向一致,则物体是沿力的方向还是沿初速度的方向运动?试用一具体实例加以说明.1.11质点仅因重力作用而沿光滑静止曲线下滑,达到任一点时的速度只和什么有关?为什么是这样?假如不是光滑的将如何?1.12为什么被约束在一光滑静止的曲线上运动时,约束力不作功?我们利用动能定理或能量积分,能否求出约束力?如不能,应当怎样去求?1.13质点的质量是1千克,它运动时的速度是k j i v 323++=,式中i 、j 、k 是沿x 、y 、z 轴上的单位矢量。
解 册究対繼*晦矍*曲:/」平衛ii 殳宦廉,交廉”的钓痕力耳欝珊谊寸c 乃向如I 用 b 陌示.収啪杯爺Cy*血平胡那论鬥式⑴* (?)峡立・解紂佔2…已暂 F 兰5 am N .棗与撑祎自虫不计匚求 BC'ffK 内力及铁员 的反力。
解该系统曼力如图(訂, 三力匸交于艰0・苴封訥的力 三角膠如图冷人祥得 屉二5OOON 』仏 二疔000 W2-2在铰链A 、B 处有力F i , F 2作用,如图所示。
该机 F i 与F 2的关系。
2-3铰链4杆机构CABD 的CD 边固定, 构在图示位置平衡,不计杆自重。
求力 30T >◎60°检(b)B解⑴柠点掐坐WAS 力如囲 归所示"H3平祈刖论咼节点瓦腿标歴覺力如国 所小*血丫轉理论得2S -F^ ccs 30fr -f ; cosW )0 =0^=-^=—^— = 1.553^F 、: - 0.644已扣两伦备車P A ^P L •处于T册状态,杆電不比求I )若片=丹=巴 角e -?2)若 P A - 300 B = 0血=?ffi 八5两轮受力分别 如图示■对A 辂育SX = 0* F 刚 cEjedO* — F\g oos$ = 0SY 二 0a F sx tin60T - F 屈 sinfl - P A = tj对 B 轮育 SX ■ 0, Fn ooa? - F,\&8^3(/ = 0 IV = 0. F rw sinff 下 F 斶 anJO* - P n =(1) 四牛封程嬴立求AL 爾<3-30*(2) 把拧-0\F A - 300 M 代入方社,联立解筹P fl = 100 N2-5如图2-10所示,刚架上作用力F 。
试分别计算力F解 M A (F) = -FbcoseM s [F) - -Fb cos0 + FosinB二F(osiii0-bcos0)2-6已知梁AB 上作用1力偶,力偶矩为M ,梁长为I ,梁重不计。
理论力学第二章课后习题答案·12·理论力系第2章平面汇交力系与平面力偶系一、是非题(恰当的在括号内踢“√”、错误的踢“×”)1.力在两同向平行轴上投影一定相等,两平行相等的力在同一轴上的投影一定相等。
2.用解析法求平面呈报力系的合力时,若挑选出相同的直角坐标轴,其税金的合力一定相同。
(√)3.在平面汇交力系的平衡方程中,两个投影轴一定要互相垂直。
(×)4.在维持力偶矩大小、转为维持不变的条件下,可以将例如图2.18(a)右图d处为平面力偶m移至例如图2.18(b)所示e处,而不改变整个结构的受力状态。
(×)(a)图2.185.如图2.19所示四连杆机构在力偶m1m2的作用下系统能保持平衡。
6.例如图2.20右图皮带传动,若仅就是包角发生变化,而其他条件均维持维持不变时,并使拎轮旋转的力矩不能发生改变。
(√图2.19图2.201.平面呈报力系的均衡的充要条件就是利用它们可以解言的约束反力。
2.三个力汇交于一点,但不共面,这三个力3.例如图2.21右图,杆ab蔡国用数等,在五个力促进作用下处在平衡状态。
则促进作用于点b的四个力的合力fr=f,方向沿4.如图2.22所示结构中,力p对点o的矩为plsin。
5.平面呈报力系中作力多边形的矢量规则为:各分力的矢量沿着环绕着力多边形边界的某一方向首尾相接,而合力矢量沿力多边形半封闭边的方向,由第一个分力的起点指向最后一个分力的终第面汇交力系与平面力偶图2.21图2.226.在直角坐标系中,力对坐标轴的投影与力沿坐标轴分解的分力的大小但在非直角坐标系中,力对坐标轴的投影与力沿坐标轴分解的分力的大小不相等。
1.例如图2.23右图的各图为平面呈报力系所作的力多边形,下面观点恰当的就是(c)。
(a)图(a)和图(b)就是平衡力系则(b)图(b)和图(c)就是平衡力系则(c)图(a)和图(c)就是平衡力系则(d)图(c)和图(d)就是平衡力系则f2f2f1(a)(b)(c)2.关于某一个力、分力与投影下面说法正确的是(b)。
理论力学课后习题第二章思考题解答
2.1.答:因均匀物体质量密度处处相等,规则形体的几何中心即为质心,故先找出各规则形体的质心把它们看作质点组,然后求质点组的质心即为整个物体的质心。
对被割去的部分,先假定它存在,后以其负质量代入质心公式即可。
2.2.答:物体具有三个对称面已足以确定该物体的规则性,该三平面的交点即为该物体的几何对称中心,又该物体是均匀的,故此点即为质心的位置。
2.3.答:对几个质点组成的质点组,理论上可以求每一质点的运动情况,但由于每一质点受到周围其它各质点的相互作用力都是相互关联的,往往其作用力难以
n3
预先知道;再者,每一质点可列出三个二阶运动微分方程,各个质点组有个相互关联的三个二阶微分方程组,难以解算。
但对于二质点组成的质点组,每一质点的运动还是可以解算的。
若质点组不受外力作用,由于每一质点都受到组内其它各质点的作用力,每一质点的合内力不一定等于零,故不能保持静止或匀速直线运动状态。
这表明,内力不改变质点组整体的运动,但可改变组内质点间的运动。
2.4.答:把碰撞的二球看作质点组,由于碰撞内力远大于外力,故可以认为外力为零,碰撞前后系统的动量守恒。
如果只考虑任一球,碰撞过程中受到另一球的碰撞冲力的作用,动量发生改变。
2.5.答:不矛盾。
因人和船组成的系统在人行走前后受到的合外力为零(忽略水对船的阻力),且开船时系统质心的初速度也为零,故人行走前后系统质心相对地面的位置不变。
当人向船尾移动时,系统的质量分布改变,质心位置后移,为抵消这种改变,船将向前移动,这是符合质心运动定理的。
2.6.答:碰撞过程中不计外力,碰撞内力不改变系统的总动量,但碰撞内力很大,
使物体发生形变,内力做功使系统的动能转化为相碰物体的形变能(分子间的结合能),故动量守恒能量不一定守恒。
只有完全弹性碰撞或碰撞物体是刚体时,即相撞物体的形变可以完全恢复或不发生形变时,能量也守恒,但这只是理想情况。
2.7.答:设质心的速度,第个质点相对质心的速度,则,代入
质点组动量定理可得
这里用到了质心运动定理。
故选用质心坐标系,在动量定理中要计入惯性力。
但质点组相对质心的动量守恒。
当外力改变时,质心的运动也改变,但质点组相对于质心参考系的动量不变,即相对于质心参考系的动量不受外力影响,这给我们解决问题带来不少方便。
值得指出:质点组中任一质点相对质心参考系有 ,对质心参考系动量并不守恒。
2.8.答不对.因为人抛球前后球与船和人组成的系统的动量守恒,球抛出后船和人的速度不再是。
设船和人的质量为,球抛出后船和人的速度为,则 球出手时的速度应是。
人做的功应等于系统动能的改变,不是只等于小球动能的改变,故人做的功应为显然与系统原来的速度无关。
2.9.答:秋千受绳的拉力和重力的作用,在运动中绳的拉力提供圆弧运动的向心力,此力不做功,只有重力做功。
重力是保守力,故重力势能与动能相互转化。
当秋千荡到铅直位置向上去的过程中,人站起来提高系统重心的位置,人克服重力做功使系统的势能增加;当达到最高点向竖直位置折回过程中,人蹲下去,内力做功降低重心位置使系统的动能增大,这样循环往复,系统的总能不断增大,秋千就可以越荡越高。
这时能量的增长是人体内力做功,消耗人体内能转换而来的。
c v i i v 'i c i v v v '+=()()()∑∑∑∑-++=⎪⎭⎫ ⎝⎛'i c i i i i i e i i i i m m dt
d a F F v ()∑∑=v c i i e
i m a F 常矢量='
∑i i
i m v V M V '()()v V m MV V m M ++=+11v m
M m V V +-=1()v V +1()()222121212121v m
M Mm V m M v V m MV +=+-++
2.10.答:火箭里的燃料全部烧完后,火箭的质量不再改变,然而质量不变是变质量物体运动问题的特例,故§2.7(2)中诸公式还能适用,但诸公式都已化为恒质量系统运动问题的公式。
2.11.答:由知,要提高火箭的速度必须提高喷射速度或增大质量比。
由于燃料的效能,材料的耐温等一系列技术问题的限制,不能过大;又由于火箭的外壳及各装置的质量相当大,质量比也很难提高,故采用多级火箭,一级火箭的燃料燃完后外壳自行脱落减小火箭的质量使下一级火箭开始工作后便于提高火箭的速度。
若各级火箭的喷射速度都为,质量比分别为,各级火箭的工作使整体速度增加,则火箭的最后速度
因每一个都大于1,故可达到相当大的值。
但火箭级数越多,整个重量越大,制造技术上会带来困难,再者级越高,质量比越减小,级数很多时,质量比逐渐减小趋近于1,速度增加很少。
故火箭级数不能过多,一般三至四级火箭最为有效。
z v v m m v v v r s r ln ln
000+=+=r v s
m m 0r v 0m r v n z z z .,,21⋅⋅⋅n v v v ⋅⋅⋅,,21()()n r n r n z z z v z z z v v v v v ⋅⋅⋅⋅=⋅⋅⋅++=+⋅⋅⋅++=212121ln ln ln ln z v。