山东大学自动控制原理网上练习题
- 格式:pdf
- 大小:617.75 KB
- 文档页数:9
自动控制原理练习题1. 小车倒车入库问题考虑一个小车倒车入库问题,假设小车以恒定的速度直线倒车。
已知小车的初始位置为P,目标是将小车倒车入停车位Q。
设停车位Q 相对于初始位置P的偏移量为d,方向为与小车移动方向相反的方向。
请回答以下问题:a) 在没有任何控制的情况下,小车如何倒车入库?b) 如何利用反馈控制使得小车能够准确倒车入库?c) 请解释闭环控制与开环控制之间的区别,并分析在这个倒车入库问题中应该选择哪种控制方法?2. PID控制器PID控制器是一种广泛应用于工业控制系统中的控制器。
它通过对错误信号的比例、积分和微分三个部分进行加权求和来调节控制器的输出。
请回答以下问题:a) 请解释PID控制器中比例、积分和微分三个部分的作用和原理。
b) 在实际应用中,如何确定PID控制器的参数?c) 请列举PID控制器的优点和缺点,并举例说明其应用领域。
3. 反馈系统的稳定性在控制系统中,稳定性是一个重要的性能指标。
稳定性可以通过系统的极点位置来判断。
请回答以下问题:a) 什么是系统的极点?它们与系统的稳定性有什么关系?b) 请解释零极点分布对系统稳定性的影响。
c) 如何利用极点配置来设计稳定的控制系统?4. 系统传递函数和频率响应系统的传递函数和频率响应是分析和设计控制系统的重要工具。
请回答以下问题:a) 什么是系统的传递函数?如何从系统的微分方程中推导出传递函数?b) 什么是系统的频率响应?如何利用频率响应来分析系统的稳定性和性能?c) 请解释Bode图和Nyquist图分别代表了什么,并举例说明它们的应用。
5. 状态空间表示和观测器设计状态空间表示是一种用于描述控制系统动态行为的方法。
观测器是一种用于估计系统状态的补偿器。
请回答以下问题:a) 什么是状态空间表示?如何将系统微分方程转化为状态空间表示?b) 什么是观测器?它的作用是什么?如何设计一个观测器?c) 请解释最优观测器与线性二次估计问题的关系,并简要介绍最优观测器的设计方法。
第一章测试1【单选题】(1分)自动控制系统工作原理正确的是?A.自动控制系统需要人的直接参与即可自动完成控制任务B.自动控制系统需要人的间接参与即可自动完成控制任务C.自动控制系统不需要人的参与即可自动完成控制任务D.自动控制系统的运行完全与人没有任何关系2【单选题】(1分)自动控制系统的组成说明正确的是?A.自动控制系统包括控制器、被控对象和传感器三部分B.自动控制系统包括比较环节、控制器、执行器、被控对象和传感器五部分C.自动控制系统包括控制系统的输入、控制器、执行器、被控对象和传感器和控制系统输出等D.自动控制系统包括控制器、执行器、被控对象和传感器四部分3【单选题】(1分)自动控制系统的反馈类型说明正确的是?A.自动控制系统既需要正反馈也需要负反馈B.自动控制系统需要正反馈C.自动控制系统离不开负反馈D.自动控制系统需构成负反馈闭环控制系统4【单选题】(1分)自动控制系统的广义被控对象由哪几部分组成?A.控制器、执行元件、测量元件B.控制器、测量元件、被控对象C.执行元件、被控对象、测量元件D.控制器、执行元件、被控对象5【单选题】(1分)关于开环系统的叙述正确的是?A.控制装置与被控对象之间既没有顺向作用也没有反向联系的控制过程B.控制装置与被控对象之间既有顺向作用又有反向联系的控制过程C.控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程D.控制装置与被控对象之间只有反向联系而没有顺向作用的控制过程6【单选题】(1分)下列说法不是开环控制系统的特性?A.抗干扰能力差,控制精度不高B.结构简单经济C.调试方便D.系统具有减小或消除偏差的能力7【单选题】(1分)自动控制系统的准确性通过哪个性能指标判断?A.稳态误差B.调节时间C.上升时间D.超调量8【单选题】(1分)将水槽中的液位高度控制在一个恒定值,这样的系统是一个()。
A.离散控制系统B.恒值控制系统C.随动控制系统D.程序控制系统9【判断题】(1分)某系统微分方程为,则该系统是线性的。
三、名词解释(1).自动控制(2).系统误差(3).频率响应四、计算题(1).求图1中电网络的传递函数,iu为输入,u为输出。
图1(1).解:电网络中输出部分的阻抗为:21)('Z RCss+=总阻抗为:CsCsRCsRsRs11)('Z)(Z111+=+=+=传递函数为:111/1)(Z)('Z)(G11+=+==CsRCsCsRCssss(2).设某单位负反馈系统的开环传递函数为11)(+=s s G k ,当输入信号)30sin()(0+=t t r 作用于闭环系统的输入端时,试求系统的稳态输出。
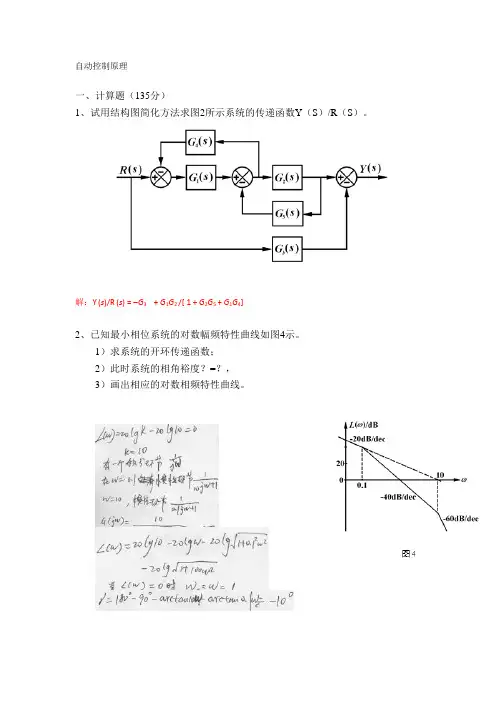
解:系统的闭环传递函数为:21)(1)()(+=+=s s G s G s G k B 所以频率特性为:21)(+=ωωj j G B 幅频特性 41)(2+=ωωj G B51)(1==ωωj G B 相频特性5.0arctan 2arctan)(-=-=∠ωωj G B系统的稳态输出为:()5.0arctan 30sin 51-+οt (3).求图2的传递函数()()()C s G s R s =。
图2解:2431324321543211)()(H G G H G G G G G G G G G G G s R s C +++=(4).控制系统的开环传递函数为)12)(1(1)(k ++=s s s G ,求该系统的开环幅频特性和开环相频特性。
解:频率特性为:)12)(1(1)(k ++=ωωωj j j G开环幅频特性为:1541)(24++=ωωωA开环相频特性为:2213)(ωωωϕ--=arctg。
自动控制原理考试试卷及答案一、选择题(每题2分,共20分)1. 下列哪项不是自动控制系统的基本组成部分?A. 控制器B. 被控对象C. 执行机构D. 操作人员答案:D2. 在自动控制系统中,下列哪项属于反馈环节?A. 控制器B. 执行机构C. 被控对象D. 反馈元件答案:D3. 下列哪种控制方式属于闭环控制?A. 比例控制B. 积分控制C. 微分控制答案:D4. 下列哪种控制方式属于开环控制?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分控制答案:A5. 在自动控制系统中,下列哪种控制规律不会产生稳态误差?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:B6. 下列哪种控制方式适用于一阶惯性环节?A. 比例控制B. 积分控制C. 微分控制答案:A7. 在自动控制系统中,下列哪种环节不会产生相位滞后?A. 比例环节B. 积分环节C. 微分环节D. 比例-积分环节答案:A8. 下列哪种控制方式可以使系统具有较好的稳定性和快速性?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D9. 在自动控制系统中,下列哪种环节可以使系统具有较好的阻尼效果?A. 比例环节B. 积分环节C. 微分环节D. 比例-积分环节答案:C10. 下列哪种控制方式可以使系统具有较好的跟踪性能?A. 比例控制B. 积分控制C. 微分控制D. 比例-积分-微分控制答案:D二、填空题(每题2分,共20分)1. 自动控制系统的基本组成部分有:控制器、被控对象、执行机构、________。
答案:反馈元件2. 在自动控制系统中,反馈环节的作用是________。
答案:减小系统的稳态误差3. 闭环控制系统的特点有:________、________、________。
答案:稳定性好、快速性好、准确性高4. 开环控制系统的缺点有:________、________、________。
自动控制原理1一、 单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在(A )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(A )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为(C ) A.1 B.2 C.5 D.107. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是(B ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以(B )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为(A ) A.45° B.-45° C.90° D.-90°10.最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( A )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( C )时,闭环系统临界稳定。
三、名词解释(1).稳定性(2).频率响应(3).传递函数四、计算题(1).求图1中电网络的传递函数,i u 为输入,0u 为输出。
图1(1).解:电网络中输出部分的阻抗为:21)('Z R Cs s += 总阻抗为:Cs Cs R Cs R s R s 11)('Z )(Z 111+=+=+=传递函数为:111/1)(Z )('Z )(G 11+=+==Cs R Cs Cs R Cs s s s(2).设某单位负反馈系统的开环传递函数为110)(+=s s G k ,当输入信号)30sin()(0+=t t r 作用于闭环系统的输入端时,试求系统的稳态输出。
(2).解:系统的闭环传递函数为:1110)1101/(110)(+=+++=s s s s G所以频率特性为:11/2211101110)(ωωωωjarctg e j j G -+=+=系统的稳态输出为:)8.24(12210)11/103(12210)11/03(21110)(o 002+=-+=-++=t Sin arctg t Sin arctg t Sin t y ωω学年 学期山东大学 自动控制原理 课程试卷 A 卷(3).求图2的传递函数()()()C s G s R s =。
图2 (3)解:闭合回路有两个:122212 ;1H G L H G G L -=-= (2分)前向通路有两个,前向通路的余子式都为1。
32212 ;1G G P G G P -==所以传递函数为:2211232211)(H G G H G G G G G s G +++=(4).控制系统的开环传递函数为)12)(1(1)(k ++=s s s G ,求该系统的开环幅频特性和开环相频特性。
(4)解: 频率特性为:)12)(1(1)(k ++=ωωωj j j G 开环幅频特性为:1541)(24++=ωωωA开环相频特性为:2213)(ωωωϕ--=arctg学年 学期山东大学 自动控制原理(非自动化类) 课程试卷 A 卷。
第一章测试1【判断题】(10分)自动控制系统的工作原理是检测{偏差},再以{偏差}为控制作用,从而消除偏差。
()A.对B.错2【判断题】(10分)自动控制装置由{测量元件},{比较元件},调节元件,{执行元件}四部分组成。
()A.错B.对3【判断题】(10分)连续系统是指系统中各部分的输入和输出信号都是连续变化的模拟量。
()A.对B.错4【判断题】(10分)线性定常系统是用线性常系数微分方程描述的系统。
()A.错B.对5【判断题】(10分)是给定输入对系统输出量的要求值。
()A.错B.对6【判断题】(10分)被控量是指被控系统所要控制的物理量。
()A.对B.错7【判断题】(10分)被控对象是指被控制的机器,设备和生产过程。
()A.错B.对8【单选题】(10分)下列选项中,开环控制系统是指系统的输出量对系统()。
A.有无控制作用B.其他选项都包括C.无控制作用9【判断题】(10分)闭环控制系统是系统的输出量对系统有控制作用。
()A.对B.错10【判断题】(10分)开环控制系统的特点是结构简单,无反馈,不能纠正偏差。
闭环控制系统的特点是能自动纠正偏差,考虑稳定性。
()A.错B.对第二章测试1【单选题】(2分)。
自动控制原理(山东大学)山东大学智慧树知到答案2024年第一章测试1.下列家用电器哪个属于闭环控制?()A:洗衣机 B:冰箱 C:电子手表 D:电视机答案:B2.下列系统哪个属于闭环控制?()A:无人售货机 B:十字路口红绿灯系统 C:数控机床 D:空调答案:D3.开环控制方式简单,控制精度高。
A:错 B:对答案:A4.只要有反馈通道,一定是闭环控制。
A:对 B:错答案:A5.线性系统一定会满足叠加原理的。
A:对 B:错答案:A6.满足叠加原理的系统,一定是线性系统。
A:错 B:对答案:B7.复合控制方式是既有开环控制,又有闭环控制。
A:错 B:对答案:B8.电枢控制的直流电动机反馈控制系统是属于()。
A:恒值控制系统 B:离散控制系统 C:连续控制系统 D:线性定常系统答案:ACD9.雷达天线控制系统是属于()。
A:连续控制系统 B:恒值控制系统 C:随动控制系统 D:线性定常系统答案:ACD10.计算机控制系统是属于()。
A:程序控制系统 B:离散控制系统 C:非线性控制系统 D:线性控制系统答案:B第二章测试1.不同的物理系统,可以是同一种环节,同一个物理系统也可能成为不同的环节,这是与描述他们动态特性的微分方程相对应的。
A:错 B:对答案:B2.常见的典型环节有几种?A:4 B:5 C:7 D:6答案:D3.在线性定常系统中,系统输出的拉普拉斯变换与输入的拉普拉斯变换之比,称为系统的传递函数。
A:对 B:错答案:B4.物理系统线性微分方程一般表示形式中,方程左端导数阶次都输入的阶次。
A:高于 B:低于或等于 C:低于 D:高于或等于答案:D5.传递函数描述系统本身属性,与输入量的关系是:A:与输入量的大小无关,与输入量的类型有关。
B:与输入量的大小有关,与输入量的类型无关。
C:与输入量的大小和类型均有关 D:与输入量的大小和类型均无关答案:C6.传递函数表示成零极点表达式时,其中的传递系数又叫根轨迹增益。
自动控制原理仿真实验课程山东大学智慧树知到答案2024年绪论单元测试1.本实验课程中所采用的实验工具为MATLAB计算软件。
A:错 B:对答案:B项目一测试1.控制系统数学模型的实验目的是()。
A:掌握多环节串联连接时整体传递函数的求取方法 B:掌握多环节反馈连接时整体传递函数的求取方法 C:掌握用MATLAB创建各种控制系统模型 D:掌握多环节并联连接时整体传递函数的求取方法答案:ABCD2.运用Matlab创建控制系统数学模型实验中介绍了()个实验原理。
A:4个 B:2个 C:5个 D:3个答案:C3.Feedback()与Cloop()函数中的sign参数表示的意义是不一样的。
()A:错 B:对答案:A4.用Matlab将传递函数转换为零极点形式的程序代码是()。
A:num=[1,3,2,1,1]; den=[1,4,3,2,3,2];G1=tf(num1, den1); G=zpk(G1)B:num1=[1,3,2,1,1]; den=[1,4,3,2,3,2];G1=tf(num, den1); G=zpk(G1)C:num1=[1,3,2,1,1]; den1=[1,4,3,2,3,2];G1=tf(num, den); G=zpk(G1)D:num=[1,3,2,1,1]; den=[1,4,3,2,3,2];G1=tf(num, den); G=zpk(G1)答案:D5.用Matlab将传递函数表达式转换成多项式的程序代码是()。
A:num= [15, 45]; den=conv(conv([1,1],[1,5]),[1,15]); G=tf(num1, den1)B:num= [15, 45]; den=conv(conv([1,1] [1,5]) [1,15]); G=tf(num, den) C:K=15;Z=[-3]; P=[-1;-5;-15]; G1=zpk(Z,P,K); G=tf(G1) D:K=15; Z=[-3]; P=[-1;-5;-15];G=zpk(Z,P,K)答案:AC项目二测试1.典型环节模拟方法及动态特性的实验目的是()。
自动控制原理题库1. 什么是自动控制原理?自动控制原理是指利用各种控制设备和技术手段,对被控对象进行监测、测量和控制的一种技术体系。
它主要研究如何设计和应用控制系统,使得被控对象能够按照既定的要求和规律进行运行和控制。
2. 自动控制原理的基本概念。
自动控制原理的基本概念包括控制系统、被控对象、控制器和传感器等。
控制系统是指由控制器、被控对象和传感器组成的一个整体,用于实现对被控对象的监测和控制。
被控对象是指需要进行控制的实际物理系统或过程,如机械系统、电气系统等。
控制器是控制系统的核心部分,它根据传感器采集到的信息,对被控对象进行控制。
传感器则用于对被控对象的状态进行监测和测量,将其转化为电信号输入到控制器中。
3. 自动控制原理的基本原理。
自动控制原理的基本原理包括反馈控制原理、开环控制原理和闭环控制原理。
反馈控制原理是指根据被控对象的实际输出与期望输出之间的差异,通过控制器对被控对象进行调节,以使输出接近期望值。
开环控制原理是指控制器根据预先设定的规律和参数,直接对被控对象进行控制,不考虑实际输出与期望输出之间的差异。
闭环控制原理则是将反馈控制原理和开环控制原理相结合,既考虑实际输出与期望输出之间的差异,又考虑预先设定的规律和参数,对被控对象进行控制。
4. 自动控制原理的应用。
自动控制原理在工业生产、交通运输、航空航天、军事防卫等领域有着广泛的应用。
在工业生产中,自动控制原理可以实现对生产过程的自动化控制,提高生产效率和产品质量。
在交通运输领域,自动控制原理可以实现对交通信号灯、电梯、自动扶梯等设备的控制,提高交通运输效率和安全性。
在航空航天和军事防卫领域,自动控制原理可以实现对飞行器、导弹、火炮等武器装备的控制,提高作战效果和作战安全性。
5. 自动控制原理的发展趋势。
随着科学技术的不断发展,自动控制原理也在不断发展和完善。
未来,自动控制原理将更加注重智能化、网络化和信息化,实现对被控对象的精准控制和实时监测。