莱伯泰科lbtk-m-i-5001工作原理
- 格式:docx
- 大小:36.46 KB
- 文档页数:1

韩国cas MNT-500L称重传感器
韩国cas MNT-500L称重传感器描述:
型号电缆长度
MNT-
50, 100J 200, 500L 3 m
MNT-1T 5 m
MNT-2T10 m
采用不锈钢材质钢镀板(5tf - 20tf);低外形MNT微型传感器;占用面积小;防护等级IP67;电缆四芯屏蔽电缆带聚氨脂插头。
韩国cas MNT-500L称重传感器参数规格:
最大量程kgf 56 100, 200, 500, Itf, 2tf
輙定输出m¥/ V 2 0 [ 0. 005
零点平衝mV/ V0 [ 0 0 &
綜合误差%0. 15
重复性%□ . 05
蠕变(30矶id %0.03
温度影响
零点值V ion0. 05
输岀值%/ ion0 10
激励电压
推荐值V10
最大值¥15
电阴
输入420 L 30
输出350 r 3 S
*> 2,000
补偿温度范围仃-10 to +40
工作溫度范團fl-20 to +8Q
韩国CAS MNT-500L称重传感器同系列产品型号: MNT-50L称重传感器
MNT-100L称重传感器
MNT-200L称重传感器
MNT-500L称重传感器
韩国CAS MNT-500L称重传感器外形设计:
unit:
mm > Red
>
> Green
> Slue
> Slack。

AITEK阿泰克传感器的工作原理AI-TEK传感器工作原理的分类物理传感器应用的是物理效应,诸如压电效应,磁致伸缩现象,离化、极化、热电、光电、磁电等效应。
被测信号里的微小变化都将转换成电信号。
化学传感器包括那些以化学吸附、电化学反应等现象为因果关系的传感器,被测信号里的微小变化也将转换成电信号。
向传感器提供土15电源,激磁电路中的晶体振荡器产生400H2的方波,经过d2030功率放大器即产生交流激磁功率电源,通过能源环形压器T1从静止的初级线圈传递至旋转的次级线圈,得到的交流电源通过轴上的整流滤波电路得到5V的直流电源,该电源做运算放大器AD822的工作电源;由基准电源AD589与双运放AD822组成的高精度稳电源产生土4.5V的精密直流电源,该电源既作为电桥电源,又作为放大器及V/转换器的工作电源。
当弹性轴受扭时,应变桥检测得到的级的应变信号通过仪表放大器AD620放大成1.5v土1v的强信号,再通过V/转换器LM31变换成频率信号,通过信号环形变压器12从旅转的初级线圈传递至静止次级线圈,再经过外壳上的信号处理电路滤波、整形即可得到与弹性轴承受的扭矩成正比的频率信号,该信号为TL电平,既可提供给二次仪表或频率计显示也可直接送计算机处理。
由于该旋转变压器动一静环之间只有零点几毫米的间隙,加之传感器轴上部分都密封在金属外壳之内,形成有效的屏蔽,因此具有很强的抗干扰能力。
有些传感器既不能划分到物理类,也不能划分为化学类。
大多数传感器是以物理原理为基础运作的。
化学传感器技术问题较多,例如可靠性问题,规模生产的可能性,价格问颗等,解决了这类难题,化学传感器的应用将会有巨大增长。
(AI-TEK)转速测里系统由转速传感器和转速测里仪表组成,转速传感器分主动式和被动式两种,主要采用变磁阻、磁敏电阳等测里原理,适用于各种工业、汽车、航天等应用环境,具有防振动、防撞击等性能,在高温、潮湿和腐蚀性环境中能可靠的长期连续工作,并设计了各种高温型、高、低转速(零转速)型、防爆型等特定用途的传感器,能充分满足各种危险环境应用的需要。
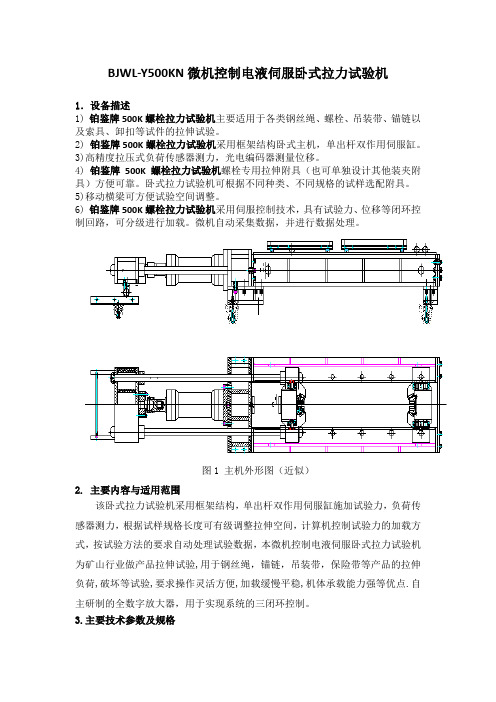
BJWL-Y500KN微机控制电液伺服卧式拉力试验机1.设备描述1)铂鉴牌500K螺栓拉力试验机主要适用于各类钢丝绳、螺栓、吊装带、锚链以及索具、卸扣等试件的拉伸试验。
2)铂鉴牌500K螺栓拉力试验机采用框架结构卧式主机,单出杆双作用伺服缸。
3)高精度拉压式负荷传感器测力,光电编码器测量位移。
4)铂鉴牌500K螺栓拉力试验机螺栓专用拉伸附具(也可单独设计其他装夹附具)方便可靠。
卧式拉力试验机可根据不同种类、不同规格的试样选配附具。
5)移动横梁可方便试验空间调整。
6)铂鉴牌500K螺栓拉力试验机采用伺服控制技术,具有试验力、位移等闭环控制回路,可分级进行加载。
微机自动采集数据,并进行数据处理。
图1 主机外形图(近似)2. 主要内容与适用范围该卧式拉力试验机采用框架结构,单出杆双作用伺服缸施加试验力,负荷传感器测力,根据试样规格长度可有级调整拉伸空间,计算机控制试验力的加载方式,按试验方法的要求自动处理试验数据,本微机控制电液伺服卧式拉力试验机为矿山行业做产品拉伸试验,用于钢丝绳,锚链,吊装带,保险带等产品的拉伸负荷,破坏等试验,要求操作灵活方便,加载缓慢平稳,机体承载能力强等优点.自主研制的全数字放大器,用于实现系统的三闭环控制。
3.主要技术参数及规格1)最大试验力:500KN2)测力范围: 50-500KN ;3)试验力准确度:±1%;4)试验空间(不包括活塞行程):5000mm ;5)伺服缸行程:1600mm ;6)位移测量范围:满量程的范围内7)测力方式:负荷传感器测力;8)本微机控制电液伺服卧式拉力试验机器具有破断保护功能,自动求取式样的抗拉强度、最大破断力等指标。
9)控制试验方式:计算机自动控制试验过程,计算机屏幕显示试验力及试验曲线,按试验方 法的要求自动处理试验数据;10)可显示多种试验曲线:力-位移、力-时间、力-变形、应力-应变等。
11)控制台与主机相分离,具有安全距离,主机应有安全防护措施12)设备外观长度尺寸:约11m4.工作条件a) 环境温度:10~35℃;b) 相对湿度不大于80%;c) 环境无震动;d) 周围无腐蚀性介质;e) 在稳定的基础上水平安装;水平度不大于0.2/1000;f) 电源电压波动范围不超过额定电压的±10%。

uqk-01-c-t工作原理
UQK-01-C-T是一种型号标识,可能是某种设备或系统的型号。
根据一般常识,我无法直接了解这个型号的具体工作原理。
但是,
一般来说,对于任何设备或系统,其工作原理都可以从以下几个方
面来解释:
1. 结构组成,首先,我们可以从设备的结构组成入手,了解设
备内部的各个部件及其功能。
这包括设备的各种传感器、执行部件、控制器等,以及它们之间的连接方式和工作原理。
2. 功能描述,其次,可以从设备的功能描述入手,了解设备是
用来完成什么样的任务或者解决什么样的问题的。
这可以帮助我们
理解设备是如何运作的以及它的工作原理。
3. 控制原理,设备通常会有相应的控制原理,包括控制算法、
逻辑控制等方面的内容。
这些控制原理可以帮助我们理解设备是如
何根据输入信号做出相应的动作或反应的。
4. 能量转换,设备通常会涉及能量的转换,比如机械能、电能、热能等。
了解设备能量转换的原理可以帮助我们理解设备的工作过
程。
5. 实际应用,最后,可以通过具体的实际应用案例来说明设备的工作原理,这有助于我们更直观地理解设备是如何工作的。
总的来说,了解任何设备或系统的工作原理,需要从其结构组成、功能描述、控制原理、能量转换和实际应用等多个角度来全面考虑和分析。
希望这些方面的解释能帮助你更好地理解UQK-01-C-T 的工作原理。


Compax3TPD-MSLVD-NMotornet DCAries ViX驱动器驱动器市场及应用。
主要特征市场及应用主要特征驱动功能驱动各种功能的驱动器驱动电机驱动电机相关驱动&Compax3/c3智能伺服驱动器Compax3概述描述Compax3是派克汉尼汾面向全球的伺服驱动器产品。
驱动器系列包括单轴,多轴驱动器,还有液压控制器。
这一系列驱动的功率从1到110kVA 。
这一伺服驱动器的整个研发及制造过程全部在德国完成。
另外的生产基地也在美国建成。
作为一款全球化的伺服驱动器控制器,Compax3在世界各地都有销售。
其服务及技术支持网点遍布所有主要工业区域,世界各地“派克授权分销合作伙伴”在其销售及维护方面确实扮演了重要角色,受过良好培训的经验丰富的应用及技术支持专家将在任何情形下为客户提供必要的专业技术支持。
特征硬件• 功率从1到110kVA • 1路编码器输出/输入• 8路数字输入/4个数字输出• 2路模拟输入(14位)• 2路模拟输出(8位)• 多种现场总线选项•广泛的安全防护技术技术功能• I10T10:驱动器控制方式:速度/转矩控制,脉冲/方向,编码器输入• I12T11:通过数字I/O 端口、RS232/RS485端口进行定位控制,绝对/相对定位,对准标记相关定位,电子齿轮,动态定位• T30: 编程环境CoDeSys 符合IEC61131-3• PLCOpen 功能模块• IEC61131-3-标准模块• C3-特定功能模块• T40:T30功能+电子凸轮功能• 控制器技术,集成运动PLC Compax3 powerPLmC-C20Compax3S高性能伺服驱动器Compax3M 多轴伺服驱动器Compax3H 高功率高性能伺服驱动器Compax3F高性能液压控制器技术特征 –概述Compax3系统配置系统配置同步伺服电机直接驱动操作执行器Compax3系统配置精密执行器液压元件Compax3控制技术控制技术实时信号处理• 降低量化噪音• 增加信号分辨率• 由于速度和电流信号的过采样• 在线反馈误差偏移量补偿与增益误差补偿• 14位分辨率(提高刻度分辨率至14位)• 插补正余弦反馈信号• 通过观测器技术决定速度• 倍增控制器带宽• 通过负载转矩观测器原理加加速度限制值设定,将导致:• 使物体移动平缓• 延长机械组件使用寿命• 无定位超调• 减低机械共振频率控制:• 反馈通路中的控制器帮助避免传递函数分子中的微分成分(将导致实际值的明显过冲)• 自动化和鲁棒控制器设计• 面向用户的优化• 参数“阻尼”及“刚度”• 响应行为最优化• 最小化以下误差• 由于速度,加速度,电机电流及jerk 的前馈• 双重回路选项• 为了获得实际的负载位置,可以通过一个额外的反馈系统来实现1: 位置2: 速度3: 加速度4: 加加速度调试/控制器最优化• 自动获取负载转动惯量• Compax3 MotorManager 用于识别电机参数及电机位置反馈• 集成示波器功能,实现最优化信号分辨率不带过采样过采样在线反馈误差补偿无补偿带补偿在前馈中使用jerk (加加速)前馈的效果示例ESOESOESO = 紧急切断*1 减速输入Compax3安全技术Compax3M 及Compax3S 驱动器支持“安全转矩断开”(STO)安全功能,意思即“安全制动”,遵循EN ISO 13849-1 Category 3, EN ISO 13849-1 PL=d/e (Compax3S),PL=e (Compax3M)及EN 1037要求防止非预期的启动。
PARKER主驱动器产品介绍及工作原理派克伺服驱动器工作原理在伺服驱动产品已经被广泛应用在机床行业,数控加工行业。
文章简要介绍新一代伺服发展的方向,并详细论述新一代伺服产品特点,提出了新一代伺服产品由于受到广泛的应用其功能特点必然会。
派克伺服驱动器工作原理同时介绍天津罗升企业有限公司所推广的智能伺服驱动器ELMO与精密直接驱动马达横河DD马达。
关键字:伺服罗升横河DD ELMO智能前言近几年,国内的工业自动化领域呈现出飞速发展的态势,国外的先进技术迅速得到引入和普及化地推广,其中作为驱动方面的重要代表产品的伺服已被广大用户所接受,在机器革新中起到了至关重要的作用。
派克伺服驱动器工作原理精准的驱动效果和智能化的运动控制通过伺服产品可以完美的实现机器的高效自动化,这两方面也成为伺服发展的重要指标。
伺服系统介绍伺服驱动技术是数控技术的重要组成部分。
伺服驱动器工作原理与数控装置相配合,伺服系统的静态和动态特性直接影响机床的位移速度,定位精度和加工精度。
现在,直流伺服系统被交流数字伺服系统所取代;伺服电机的位置,速度及电流环都实现了数字化;并采用了新的控制理论,实现了不受机械负荷变动影响的高速响应系统(图1)。
图1半闭环伺服控制其主要新发展的技术有:a.前馈控制技术。
过去的伺服系统,是把检测器信号与位置指令的差值乘以位置环增益作为速度指令。
伺服驱动器工作原理在这种控制方式总是存在着跟踪滞后误差,这使得在加工拐角及圆弧时加工精度恶化。
所谓前馈控制,就是在原来的控制系统上加上速度指令的控制方式,这样使伺服系统的跟踪滞后误差大大减小。
b.机械静止摩擦的非线性控制技术。
伺服驱动器工作原理对于一些具有较大静止摩擦的数控机床,新型数字伺服系统具有补偿机床驱动系统静摩擦的非线性控制功能。
c.伺服系统的位置环和速度环(包括电流环)均采用软件控制,如数字调解和矢量控制等。
伺服驱动器工作原理为适应不同类型的机床,不同精度和不同速度要术,预先调整加、减速性能。
电磁力称重传感器基本工作原理导语:称重技术集传感器技术、微电子技术、计算机控制及测量技术、机械自动化技术、物流输送和管理技术为一体,是现代称重计量和控制系统工程的技术基础。
一、动态称重技术的发展趋势及相关产品称重技术集传感器技术、微电子技术、计算机控制及测量技术、机械自动化技术、物流输送和管理技术为一体,是现代称重计量和控制系统工程的技术基础。
涉及到各个行业,功能也不再是单纯的计量,而是向多参数、专业综合控制方面发展,形成多元化的智能管理和控制系统,大致可以概括为以下几个特点:1. 高速度、高精度、高性能;2 小型化、模块化、智能化及综合化;3.稳定性、质量可靠性、长寿命、故障自诊断及可维护性;4. 网络化管理,实现网上通讯和远程控制;总之,智能化、自动化、多功能将成为现代称重技术的发展方向。
应用动态称重技术,主要的产品有:连续累计自动衡器(皮带秤);自动分检衡器;重力式自动装料衡器;自动轨道衡器;动态汽车衡等等。
二、电磁力平衡称重传感器在动态称重技术的应用01电磁力平衡传感器的基本原理及理论基础电磁力是电荷、电流在电磁场中所受力的总称,也有称静止电荷在电场中所受力为静电力,而载流导体在磁场中受到的作用力称为安培力,电流I,长为L的导线。
在均匀的磁场中受到的安培力大小为:F=ILBsinθ其中θ为电流方向与磁场强度方向间的夹角,I为通电直导线上通过的电流,B为通电直导线所在磁场的强度,L为通电直线在磁场区域内的长度。
当电流方向与磁场方向相同或者相反时,电流不受磁场力作用。
当电流方向与磁场方向垂直时,电流受的安培力最大,为:F=ILB安培力的方向由左手定则判定,将左手掌摊平,让磁力线穿过手掌心,四指表示电流运动的方向,则与四指垂直的大拇指所指向方向即为安培力的方向。
安培力的实质是形成电流的定向移动的电荷所受洛伦兹力的合力。
如下图2-1所示:电磁力平衡传感器的称重过程基于安培力实现的。
通电导线在磁场中受到的作用力如下图2-2所示,在导线上加秤盘,秤盘及导线本身具备的重力方向朝下,而通电导线受到向上的电磁力,当通过导线的电流值达到某一值时,这两个力互相平衡,此时传感器处于平衡状态,如图2-3所示。
莱伯泰科lbtk-m-i-5001工作原理
莱伯泰科(LBTK)公司生产的LBTK-M-I-5001是一种基于光纤传感技术的温度传感器。
它的工作原理基于热敏效应和光纤传感原理。
LBTK-M-I-5001传感器通过光纤传感技术来测量温度。
它包含一个光纤和一对拉曼光纤器件(Raman光纤器件一般是一个特别配制的光纤,可实现Raman散射)。
光纤的一端连接到一个光源,通常是一个激光器。
光纤的另一端连接到一个光谱仪。
当激光器发出光线时,光线通过光纤传输并且与Raman光纤器件发生散射。
散射的光线包含了一些特定的频率偏移,这些频率偏移与光线与物质相互作用后的细微变化有关。
这些频率偏移的大小与温度相关。
传感器将接收到的散射光线从Raman光纤器件传输到光谱仪中进行分析。
光谱仪会测量散射光线中的频率偏移,并且将其转换为温度值。
根据散射光线中的频率偏移,传感器可以确定温度变化。
LBTK-M-I-5001传感器的工作原理基于光纤传感技术,它可以实现高精度的温度测量,并且具有多种应用领域,例如工业控制、环境监测等。