激光测速仪
- 格式:doc
- 大小:118.16 KB
- 文档页数:7

激光测速仪工作原理
激光测速仪是一种使用激光技术进行测速的仪器。
其工作原理基于时差测量法和光电技术。
激光测速仪首先发射一束窄束的激光,激光束经过透镜聚焦形成一个射线束。
当射线束遇到行进中的目标物时,部分激光会被目标物反射或散射。
激光测速仪接收到反射或散射的激光后,通过光电二极管将光信号转换为电信号。
激光测速仪的核心原理是利用激光的光速非常快的特点,计算出激光从发射器发出到接收器接收到的时间差。
通过精确测量时间差,激光测速仪就能计算出目标物的速度。
具体的工作过程如下:激光测速仪通过内部时钟系统记录激光发射的时间,然后激光束经过一段距离后被目标物反射或散射,再经过同样长度的路径返回激光测速仪。
当反射或散射回来的激光被光电二极管接收到时,记录下接收到的时间。
激光测速仪通过计算发射时间和接收时间的差值,得到激光往返的时间。
然后利用光速的固定值,将时间差转换为距离。
根据测得的距离差值和知道的时间差,激光测速仪就可以计算出目标物的速度。
例如,如果已知激光往返时间为10纳秒,
而激光在空气中的传播速度是299,792,458米/秒,就可以得知
目标物与测速仪的距离为2.99792458米。
根据已知的时间间
隔和距离,激光测速仪进一步计算出速度。
激光测速仪工作原理简单而灵活,能够实现高精度的测速。
它广泛应用于交通管理、科学研究以及工业生产等领域。
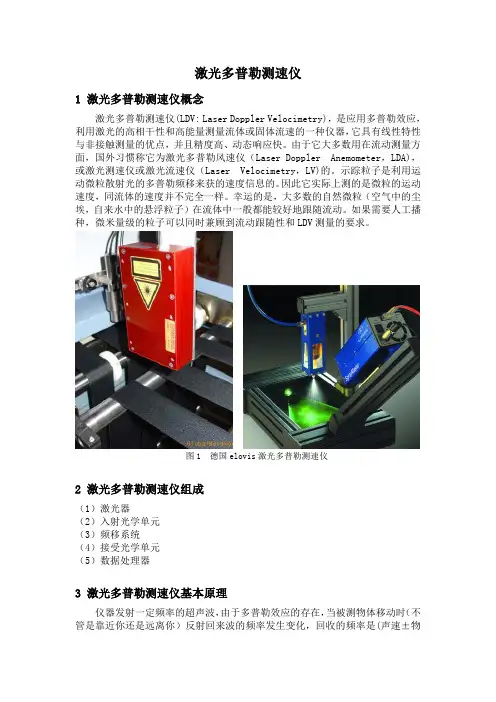
激光多普勒测速仪1 激光多普勒测速仪概念激光多普勒测速仪(LDV: Laser Doppler Velocimetry),是应用多普勒效应,利用激光的高相干性和高能量测量流体或固体流速的一种仪器,它具有线性特性与非接触测量的优点,并且精度高、动态响应快。
由于它大多数用在流动测量方面,国外习惯称它为激光多普勒风速仪(Laser Doppler Anemometer,LDA),或激光测速仪或激光流速仪(Laser Velocimetry,LV)的。
示踪粒子是利用运动微粒散射光的多普勒频移来获的速度信息的。
因此它实际上测的是微粒的运动速度,同流体的速度并不完全一样。
幸运的是,大多数的自然微粒(空气中的尘埃,自来水中的悬浮粒子)在流体中一般都能较好地跟随流动。
如果需要人工播种,微米量级的粒子可以同时兼顾到流动跟随性和LDV测量的要求。
图1 德国elovis激光多普勒测速仪2 激光多普勒测速仪组成(1)激光器(2)入射光学单元(3)频移系统(4)接受光学单元(5)数据处理器3 激光多普勒测速仪基本原理仪器发射一定频率的超声波,由于多普勒效应的存在,当被测物体移动时(不管是靠近你还是远离你)反射回来波的频率发生变化,回收的频率是(声速±物体移动速度)/波长,由于和波长都可以事先测出来(声速会随温度变化有所变化,不过可以依靠数学修正),只要将回收的频率经过频率-电压转换后,与原始数据进行比较和计算后,就可以推断出被测物体的运动速度。
图2 激光多普勒测速仪基本原理图4 激光多普勒测速仪特点和应用1)激光多普勒测量仪应用多普勒频差效应的原理,结构紧凑、重量轻、容易安装操作、容易对光调校;2)激光多普勒测量仪可以在恒温,恒湿,防震的计量室内检定量块,量杆,刻尺和坐标测量机等。
3)激光多普勒测量仪既可以对几十米甚至上百米的大量程进行精密测量,也可以对手表零件等的微小运动进行精密测量;既可以对几何量如长度、角度、直线度、平行度、平面度、垂直度等进行测量,也可以用于特殊场合,诸如半导体光刻技术的微定位和计算机存储器上记录槽间距的测量等等。
激光多普勒测速仪工作原理激光多普勒测速仪,听上去就像科幻电影里的高科技玩意儿,其实它的原理并没有那么复杂。
想象一下,你在路边看着一辆车飞驰而过,车子发出的声音变高了,然后又变低了,这就是多普勒效应的魔力。
激光多普勒测速仪就像是把这个声音的变化变成了光的变化。
我们来聊聊它是怎么工作的。
这个仪器会发出一束激光,这束激光就像是你的好朋友,跟着你走来走去。
然后,当这束激光照到移动物体,比如说一辆车或者一块正在转动的机械零件时,激光会被反射回来。
可有趣的是,这个反射回来的光波频率会发生变化,快的东西反射回来的光频率变高,慢的则相对低一些。
就好像当你向某个人打招呼时,他们走得快,你的声音听起来就会高亢激昂,走得慢时,你的声音又会变得悠扬而柔和。
仪器的探测器就像是个侦探,专门负责捕捉这些反射回来的光波。
探测器会把这些光波的频率变化进行分析,最终算出物体的速度。
你看,就像数学题一样,难度不高吧?而且这个过程是相当迅速的,几乎可以实时监测到物体的运动状态。
大家都知道,速度是非常重要的,无论是在交通管理上,还是在工业生产中。
激光多普勒测速仪的应用广泛得不得了。
比如说,汽车制造商在检测新车的性能时,会用这个仪器来确认车速是否达标。
再比如,机场里的雷达监控也可以借助激光多普勒测速仪来监控飞行器的速度,保证一切安全无误。
说到这里,很多人可能会想,“这玩意儿是不是得很贵?”其实现在的科技越来越普及,价格也逐渐亲民了,很多企业都能负担得起。
而且激光多普勒测速仪还有个特别之处,就是它可以在不接触物体的情况下进行测量,简单来说,就是“隔空取物”。
这就像你在家里用遥控器调电视,既方便又不费劲。
想想看,如果在高温或者危险的环境下工作,能够用激光来测量速度,那是多么安全啊。
再说说它的精准度,激光多普勒测速仪的测量结果非常准确,通常能够达到千分之一米每秒的精度。
这对于一些需要高精度的工业流程,简直就是福音。
比如说,做一些精密加工的机械,稍微的误差都可能导致整个产品的失败,所以激光多普勒测速仪的出现,无疑提升了生产效率和质量。
双光束激光测速仪模拟测速误差测量不确定度的评定
双光束激光测速仪是一种用于测量车辆速度的设备。
在进行测速时,双光束激光测速仪会发射两束激光束,并利用接收到的激光信号的时间差来计算车辆的速度。
在测速过程中,由于各种因素的影响,会导致测速数据的误差。
为了评估测速误差的不确定度,需要进行模拟测速误差测量。
模拟测速误差测量主要包括以下几个步骤:
1. 实验设定:首先需要确定实验的具体设定,包括测速距离、测速速度和激光测速仪的工作参数等。
2. 模拟误差生成:根据实际测速时可能存在的误差源,如仪器误差、环境条件变化等,生成模拟误差。
可以采用数学模型或者模拟实验等方法进行。
3. 数据采集:在模拟测速过程中,需要采集测速仪的输出数据,并记录误差源的相关信息。
可以使用数据采集设备或者记录仪等设备进行。
4. 数据处理:对采集到的数据进行处理,计算测速误差和误差的不确定度。
可以采用统计学方法,如方差分析等进行数据处理。
5. 不确定度评定:根据数据处理结果,评定测速误差的不确定度。
可以采用不确定度分析方法,如哥白尼不确定度原理等进行。
在评定模拟测速误差的不确定度时,需要考虑各个误差源的贡献程度和相互之间的相关性。
不同仪器误差源之间可能存在相关性,需要进行相关性分析。
还需要考虑系统误差和随机误差的影响。
双光束激光测速仪模拟测速误差测量不确定度的评定对于提高测速仪的测量精度和可靠性具有重要意义。
通过评定不确定度,可以确保测速数据的准确性,并对测速仪的性能进行评估和改进。
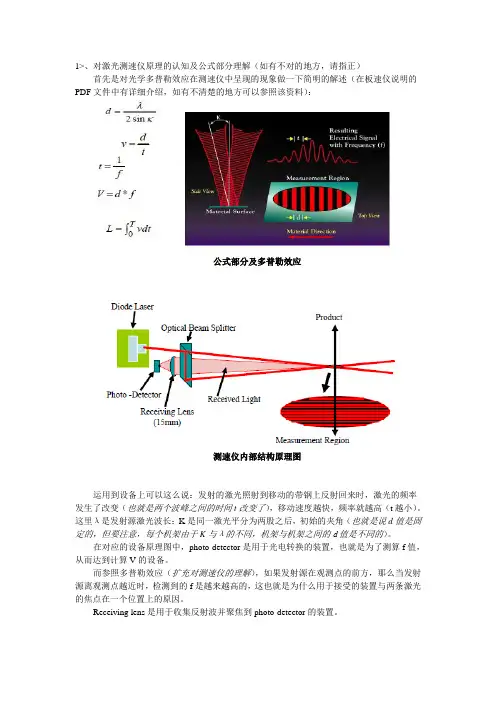
1>、对激光测速仪原理的认知及公式部分理解(如有不对的地方,请指正)
首先是对光学多普勒效应在测速仪中呈现的现象做一下简明的解述(在板速仪说明的PDF文件中有详细介绍,如有不清楚的地方可以参照该资料):
公式部分及多普勒效应
测速仪内部结构原理图
运用到设备上可以这么说:发射的激光照射到移动的带钢上反射回来时,激光的频率发生了改变(也就是两个波峰之间的时间t改变了),移动速度越快,频率就越高(t越小)。
这里λ是发射源激光波长;K是同一激光平分为两股之后,初始的夹角(也就是说d值是固定的,但要注意,每个机架由于K与λ的不同,机架与机架之间的d值是不同的)。
在对应的设备原理图中,photo-detector是用于光电转换的装置,也就是为了测算f值,从而达到计算V的设备。
而参照多普勒效应(扩充对测速仪的理解),如果发射源在观测点的前方,那么当发射源离观测点越近时,检测到的f是越来越高的,这也就是为什么用于接受的装置与两条激光的焦点在一个位置上的原因。
Receiving lens是用于收集反射波并聚焦到photo-detector的装置。

激光多普勒测速仪
1 激光多普勒测速仪概念
激光多普勒测速仪(LDV: Laser Doppler Velocimetry,是应用多普勒效应,利用激光的高相干性和高能量测量流体或固体流速的一种
仪器,它具有线性特性与非接触测量的优点,并且精度高、动态响应快。
由于它大多数用在流动测量方面,国外习惯称它为激光多普勒风
速仪(Laser Doppler Anemometer,LDA,或激光测速仪或激光流速仪(Laser Velocimetry,LV的。
示踪粒子是利用运动微粒散射光的多普勒频移来获的速度信息的。
因此它实际上测的是微粒的运动速
度,同流体的速度并不完全一样。
幸运的是,大多数的自然微粒(空
气中的尘埃,自来水中的悬浮粒子)在流体中一般都能较好地跟随流动。
如果需要人工播种,微米量级的粒子可以同时兼顾到流动跟随性
和LDV测量的要求。
双光束激光测速仪模拟测速误差测量不确定度的评定
双光束激光测速仪是一种用于测量运动物体速度的设备,其原理是利用激光束在照射物体表面后反射回来的时间差来计算物体的速度。
在实际应用中,由于各种因素的影响,测速仪的测量结果会产生误差,而测速误差的大小可以通过测量不确定度来评定。
测量不确定度是对测量结果的不确定程度的度量,它包括两部分:随机误差和系统误差。
随机误差是由测量设备本身的精度和测量环境中的扰动引起的,其大小可以通过多次测量同一物体的速度来进行统计分析得到。
系统误差是由测量设备的固有缺陷和人为操作不当等因素引起的,其大小则需要通过实验和校准来评定。
1. 确定测量目标:首先要明确测量的目标是什么,例如测量一个运动物体的速度。
2. 设定测量条件:确定测量条件,包括测量距离、测量时间、测量环境等。
3. 进行多次测量:使用测速仪进行多次测量,记录下每次测量得到的速度数值。
4. 统计分析数据:对测量数据进行统计分析,计算平均值和标准差。
平均值表示测量结果的中心位置,标准差表示测量结果的离散程度。
5. 计算不确定度:根据统计分析结果,计算测量结果的不确定度。
不确定度可以通过标准差的估计值来计算,也可以通过置信概率和置信区间来计算。
6. 考虑系统误差:在实际应用中,还需要考虑系统误差的影响。
可以通过对测量仪器进行校准和实验来评定系统误差的大小,并将其加入到不确定度的计算中。
评定双光束激光测速仪模拟测速误差的不确定度需要综合考虑随机误差和系统误差,并提供一个可信的测量结果。
在评定过程中,应注意选择合适的统计方法和标准,确保评定结果的准确性和可靠性。
激光多普勒测速仪1 激光多普勒测速仪概念激光多普勒测速仪(LDV: Laser Doppler Velocimetry),是应用多普勒效应,利用激光的高相干性和高能量测量流体或固体流速的一种仪器,它具有线性特性与非接触测量的优点,并且精度高、动态响应快。
由于它大多数用在流动测量方面,国外习惯称它为激光多普勒风速仪(Laser Doppler Anemometer,LDA),或激光测速仪或激光流速仪(Laser Velocimetry,LV)的。
示踪粒子是利用运动微粒散射光的多普勒频移来获的速度信息的。
因此它实际上测的是微粒的运动速度,同流体的速度并不完全一样。
幸运的是,大多数的自然微粒(空气中的尘埃,自来水中的悬浮粒子)在流体中一般都能较好地跟随流动。
如果需要人工播种,微米量级的粒子可以同时兼顾到流动跟随性和LDV测量的要求。
图1 德国elovis激光多普勒测速仪2 激光多普勒测速仪组成(1)激光器(2)入射光学单元(3)频移系统(4)接受光学单元(5)数据处理器3 激光多普勒测速仪基本原理仪器发射一定频率的超声波,由于多普勒效应的存在,当被测物体移动时(不管是靠近你还是远离你)反射回来波的频率发生变化,回收的频率是(声速±物体移动速度)/波长,由于和波长都可以事先测出来(声速会随温度变化有所变化,不过可以依靠数学修正),只要将回收的频率经过频率-电压转换后,与原始数据进行比较和计算后,就可以推断出被测物体的运动速度。
图2 激光多普勒测速仪基本原理图4 激光多普勒测速仪特点和应用1)激光多普勒测量仪应用多普勒频差效应的原理,结构紧凑、重量轻、容易安装操作、容易对光调校;2)激光多普勒测量仪可以在恒温,恒湿,防震的计量室内检定量块,量杆,刻尺和坐标测量机等。
3)激光多普勒测量仪既可以对几十米甚至上百米的大量程进行精密测量,也可以对手表零件等的微小运动进行精密测量;既可以对几何量如长度、角度、直线度、平行度、平面度、垂直度等进行测量,也可以用于特殊场合,诸如半导体光刻技术的微定位和计算机存储器上记录槽间距的测量等等。
激光测速工作原理是什么
激光测速是一种利用激光技术进行测量车辆速度的方法。
其工作原理主要基于多普勒效应和光的传播原理。
当激光束照射到移动的车辆上时,由于车辆的运动,激光经过车辆后的回波频率会产生变化。
这种频率变化被称为多普勒频移。
根据多普勒效应原理,当物体向探测器靠近时,回波频率会增加;当物体远离探测器时,回波频率会减小。
因此,通过测量回波频率的变化,可以推算出车辆的速度。
激光测速仪通常由一个激光器和一个接收器组成。
激光器会向车辆发射一束窄束的激光束,该激光束会在车辆表面反射并返回给接收器。
接收器会分析接收到的激光信号并测量多普勒频移,从而计算出车辆的速度。
在实际应用中,激光测速仪能够提供精确的车速测量结果,并广泛应用于交通监管、道路安全管理和交通流量测量等领域。
值得注意的是,激光测速仪对于测量距离和速度的准确性会受到一些影响因素的影响,如天气、目标物体的材料和速度等。
因此,在使用激光测速仪进行测量时,需要对这些因素进行适当的校正和考虑。


如何选择激光测速仪?目前我国较多采用的测速方式有雷达测速、地感线圈测速方式、视频测速、红外线检测和激光测速。
其中,雷达测速仪以其价格便宜,使用方便和能在运动中实现车速检测,在我国公安交管部门中应用蕞为广泛,但本次小编着重讲解如何选择激光测速仪。
激光测速仪的特点1.激光测速仪发出的激光束极细(激光发射部发散角为3mrad),在100米处直径仅为30公分,所以照射面小,可精确瞄准任一目标。
2.测速距离相对于雷达测速有效距离远,可测1000M外,可从远距离抓拍,不被发觉(当然,考虑到摄像机镜头原因,正常在100米~150米处抓拍)。
3.反应快,单次测速时间为0.3秒。
4.鉴于激光测速的原理,激光测速器不可能具备在运动中使用,只能在静止状态下应用;所以一般交警都把仪器放在巡逻车上,停车静止使用5.由于激光测速仪的激光束极细,而且它的反应时间极快,故市场上一般电子探测器对激光测速仪的干扰和探测没有用。
三、激光测速较雷达测速的优势车辆超速违章最易受到的挑战即是如何确认违规车辆,例如在多车道公路上两车以上并行时,警员以雷达测得超速现象却无法明确认定那一部车辆违规。
原因在于雷达测速不同于激光测速,雷达测速的原理是应用多普勒效应,即移动物体对所接收的电磁波有频移的效应,雷达测速仪是根据接收到的反射波频移量的计算而得出被测物体的运动速度。
雷达测速主要特点是雷达波束较激光光束(射线)的照射面大,因此雷达测速易于捕捉目标,但是雷达测速的准确率不高,如果碰到几条车道上同时有几辆车平行驶来,雷达很难测到哪一辆超速车辆激光测速在交通执法中的应用目前在国内已经有很多执法单位正在使用手持式激光测速仪LTITruSpeed 、Onick LS320、LSP320带拍照取证测速仪。
激光测速仪是一种新型交通管理执法工具,它为治理违章超速行驶提供了一种可靠的技术取证手段,它克服了雷达测速仪测量速度慢、波束宽及辐射对人体健康造成的不佳影响等弊病,因此它具有雷达测速仪无法比拟的优点,即可测速,又能测距,功能性强,能毫不费力地从繁忙的多车道公路上检测出单一车辆的速度,甚至一辆摩托车的速度。
双光束激光测速仪模拟测速误差测量不确定度的评定双光束激光测速仪是一种常用的测量车辆速度的仪器。
在实际使用中,由于各种因素的影响,测速仪的测量结果往往存在一定误差。
为了评定双光束激光测速仪的测速误差,需要考虑测量不确定度。
测量不确定度是指测量结果与被测量真值之间的差异的范围。
在测速仪的测速误差评定中,测量不确定度反映了测量结果的可靠程度。
1. 确定测量系统的结构和工作原理:双光束激光测速仪由发射器、接收器和计算器等组成。
了解测量系统的结构和工作原理可以帮助我们确定可能产生误差的因素。
2. 列出误差来源清单:根据测量系统的结构和工作原理,将可能影响测量结果的因素列出来。
光源的稳定性、接收器的灵敏度、测量距离等都可能引起误差。
3. 确定误差来源的类型和大小:根据对测量系统的了解和实际测量情况,确定每个误差来源的类型和大小。
光源的稳定性可能引起连续测量中的误差,测量距离的不准确性可能引起单次测量中的误差。
4. 评估每个误差来源的不确定度:根据误差来源的类型和大小,使用适当的方法评估每个误差来源的不确定度。
常用的评估方法包括标准差法、扩展不确定度法等。
5. 组合不确定度:将每个误差来源的不确定度组合成总的不确定度。
可以使用根和法、Monte Carlo模拟等方法进行组合。
6. 评定测速误差:根据总的不确定度,评定测速误差的范围。
通常情况下,可以使用实测结果加减总的不确定度,得到测速误差的上限和下限。
需要注意的是,在进行不确定度评定时,要考虑误差来源之间的相互影响。
光源的稳定性和接收器的灵敏度可能相互影响,导致测速误差的增大。
双光束激光测速仪模拟测速误差测量不确定度的评定是一个复杂的过程,需要考虑测量系统的结构和工作原理,列出误差来源的清单,评估每个误差来源的不确定度,并进行组合。
这个评定过程可以帮助我们了解双光束激光测速仪的测速误差范围,提高测量结果的可靠性。
雷达测速仪与激光测速仪区别测速仪在交通执法中的应用:目前我国较多采用的测速方式有雷达测速、激光测速、地感线圈测速方式、视频测速和红外线检测。
目前,运用最多的还是雷达测速和激光测速这两种。
一、最大的区别—原理不同激光测速的原理是用过发射和接收激光光束来计算时间差,从而来确定被测物体与测试点的距离。
激光测速是对被测物体进行两次有特定时间间隔的激光测距,取得在该时段内被测物体的移动距离,从而得到该被测物体的移动速度。
雷达测速的原理是应用多谱勒效应,即移动物体对所接收的电磁波有频移的效应,雷达测速仪是根据接收到的反射波频移量的计算而得出被测物体的运动速度。
二、测速量程不同激光测速的距离相对于雷达测速有效距离远,可测1000M外,可从远距离抓拍。
雷达发射的电磁波波束有一定的张角,故有效测速距离相对于激光测速近一些,最远测速距离为800 m(针对大车)。
三、测量精度不同激光测速仪发出的激光束极细(激光发射部发散角为3mrad),可以进行精准测量,在100米处直径仅为30公分,所以照射面小,可精确瞄准任一目标。
雷达测速仪的雷达波束较激光光束(射线)的照射面大,因此雷达测速易于捕捉目标,不需要精确瞄准,很难对车辆进行单一测速。
雷达固定测速误差为±1Km/h,运动时测误差为±2Km/h。
四、激光测距仪与雷达测速仪的优劣激光测速的优点:1、测速灵敏:测量反应快,单次测速时间约为0.33-0.66秒。
2、抗干扰:由于激光测速仪的激光束极细,而且它的反应时间极快,故市场上一般电子探测器对激光测速仪的干扰和探测没有用。
3、一类安全激光,对人眼睛安全:目前大部分国家所采用的激光测速仪使用的是一类安全激光,对人眼睛安全。
4、取证能力好:激光测速仪的取证能力远远大于雷达测速仪,因而受到全世界广泛的认可和推广,例如欧尼卡LSP320手持拍照激光测速仪就可以一边测速,一边拍照,把拍到的照片保存在仪器中,便于取证。
激光测速仪的测绘技术原理与操作指南激光测速仪是一种广泛应用于测绘领域的先进测量设备,它利用激光技术来实现精确的测量和测绘工作。
本文将介绍激光测速仪的测绘技术原理及操作指南,帮助读者更好地了解和应用这一技术。
一、激光测速仪的原理激光测速仪通过发射一束狭窄且高亮度的激光束,利用光的传播和反射的原理进行测量。
在测量时,首先由激光测速仪发射一束激光束,激光束与被测物体相交后被反射回来。
激光测速仪通过测量激光束发射和接收之间的时间差,以及激光束的波长和传播速度,计算出被测物体到激光测速仪的距离。
激光测速仪的测量精度和稳定性取决于多种因素,包括红外激光源的质量、接收器的响应速度、激光束的调制方式等。
为了获得更准确的测量结果,激光测速仪通常还配备了高精度的位置测量系统,可以实时记录激光测速仪在测量过程中的位置信息。
二、激光测速仪的应用激光测速仪广泛应用于测绘领域的各个方面,包括地形测量、建筑测量、道路测量等。
下面将分别介绍这些应用的具体操作指南。
1. 地形测量地形测量是激光测速仪的主要应用之一。
在进行地形测量时,首先需要在目标地区设置若干个测量点,这些测量点应尽可能分布均匀。
然后,将激光测速仪设置在一个固定的位置,通过扫描模式测量每个测量点与激光测速仪的距离。
在进行地形测量时,有几个注意事项需要注意。
首先,测量时要确保激光测速仪与目标地区之间没有障碍物,以免对测量结果产生干扰。
其次,测量时要注意导线的张力,避免误差的产生。
最后,测量完成后要及时记录和整理测量数据,进行数据分析和处理。
2. 建筑测量激光测速仪在建筑测量中的应用非常广泛。
在进行建筑测量时,激光测速仪可以用来测量建筑物的高度、长度、宽度等参数。
通过测量建筑物的各个部位,可以制作出建筑物的平面图和立体图,为建筑设计和工程施工提供参考数据。
在进行建筑测量时,首先需要确定测量的对象和目标,然后选择合适的测量方式和仪器。
在测量时要保持仪器的稳定性和准确性,避免因摇晃或误操作而产生误差。
激光多普勒测速仪测速原理宝子!今天咱们来唠唠一个超酷的东西——激光多普勒测速仪。
你可别一听这名字就觉得很复杂,其实呀,原理还是能让人搞明白的呢。
咱先来说说这个多普勒效应。
你有没有过这样的经历呀,当一辆救护车或者警车鸣着笛朝你开过来的时候,你听到的声音是越来越高的,然后它从你身边呼啸而过的时候,声音一下子就变低了。
这就是多普勒效应在声音里的体现啦。
简单来说呢,就是当波源和观察者有相对运动的时候,观察者接收到的波的频率就会发生变化。
那这个激光多普勒测速仪呢,就是把这个多普勒效应用到了激光上。
想象一下,激光就像一群超级有纪律的小士兵,排着整齐的队伍向前冲。
当这些激光小士兵打到一个正在移动的物体上的时候,就像一群小光弹打到了一个跑来跑去的小怪兽身上。
这个时候呢,因为物体在动,激光反射回来的光就发生了频率的变化。
就好像是小光弹被小怪兽撞了一下,然后它们回来的速度和节奏都不一样了。
那这个测速仪是怎么知道这个频率变化的呢?这里面可就有一些小机关啦。
测速仪里面有一些很聪明的装置,它们能够把反射回来的激光和原来发射出去的激光进行对比。
就像是在比较两个合唱团唱歌的节奏一样。
如果反射回来的激光频率变高了或者变低了,这个装置就能精确地测量出来。
你知道吗?这个激光多普勒测速仪可厉害着呢。
它可以测量非常小的物体的速度,小到像微小的颗粒在气流里飘来飘去的速度都能测出来。
比如说在一些科学实验里,科学家们想要知道灰尘颗粒在空气里是怎么运动的,这个测速仪就派上大用场啦。
它就像一个超级侦探,能够把这些小颗粒的一举一动都看得清清楚楚。
而且哦,这个测速仪的精度还特别高。
它就像一个特别细心的小工匠,一点点的误差都不放过。
不管是测量高速运动的物体,还是慢悠悠移动的物体,它都能给出非常准确的速度数值。
这在很多工业生产里可太重要了。
比如说在汽车制造的时候,要测量汽车发动机里一些部件的转速,激光多普勒测速仪就能很精确地完成这个任务,就像一个严格的监工一样,确保每个部件都在正常的速度下运转。
双光束激光测速仪模拟测速误差测量不确定度的评定【摘要】本文主要介绍了双光束激光测速仪模拟测速误差测量不确定度的评定方法。
首先介绍了双光束激光测速仪的原理,然后分析了误差来源,接着讨论了不确定度评定方法。
随后详细描述了模拟测速误差实验设计和数据处理与分析过程。
最后给出了模拟测速误差测量不确定度评定的结论,并指出了研究的意义和未来的展望。
通过本文的研究,可以为双光束激光测速仪的实际应用提供有力的支撑和指导。
【关键词】双光束激光测速仪、模拟测速误差、不确定度评定、误差来源、数据处理、实验设计、测速仪原理、结论、研究目的、研究意义、展望。
1. 引言1.1 背景介绍双光束激光测速仪是一种常用的测速设备,通过激光技术高精度地测量目标物体的速度。
随着科技的发展,双光束激光测速仪在工业生产、交通运输等领域得到了广泛应用。
在实际使用中,由于测量误差的存在,测速结果可能存在一定的不确定度,影响着测速仪的准确性和可靠性。
为了对双光束激光测速仪的测速误差进行评定和控制,需要对其误差来源进行分析,制定相应的不确定度评定方法,并设计模拟测速误差实验进行验证。
本文旨在通过对双光束激光测速仪的模拟测速误差测量不确定度进行评定,为提高测速仪的测量准确性提供参考。
通过本研究,可以更好地了解双光束激光测速仪的测速性能,为其在各个领域的应用提供技术支持和保障。
1.2 研究目的本研究的目的是通过对双光束激光测速仪模拟测速误差进行测量和评定,探讨其测量结果的不确定度,并提出相应的优化方案。
具体包括对双光束激光测速仪原理进行深入研究,分析误差来源并确定关键影响因素,探讨不确定度评定方法并构建合适的评定模型,设计模拟测速误差实验并进行实际测量,对实验数据进行处理和分析,最终得出模拟测速误差测量不确定度的评定结论。
通过这些研究,旨在提高双光束激光测速仪的测量精度和可靠性,为实际应用中的精准测速提供科学依据和技术支持。
本研究也将为相关领域的进一步研究提供参考和借鉴,具有一定的理论和应用价值。
第三组实验方案
激光测速仪
原理介绍:
外对射探测器全名叫“光束遮断式感应器””(Photoelectric Beam Detector),其基本的构造包括激光束生器、光敏传感器、LED信号指示灯等。
当激光照射到光敏电阻上时使光敏电阻阻值改变而引起光敏电阻两端的电压改变。
电压变化信号通过传感器传到计数器上计数器计时。
光电系统一端有2个激光束源,另一端对应有2个光敏传感器;当有物体挡光时,光敏电阻两端为高电压。
当光电系统计数时,传感器将高低变化的信号传到计数器上,计数器计数一次。
当计数器计时时,计数器获得高电压时计时开始,获得低电压时计时结束。
这样就可以测的物体通过光电系统的时间。
光敏电阻原理图:
光敏电阻特性:
测量方法:
在物体要通过路径的一边并排放上2个红外发生器且2发生器的距离较小,再在路径的另一边对应的放上2个光敏传感器。
校正发生和接受装置,使其能正常接收和发生时开始实验。
实验时让物体通过光电装置,当物体第一次挡光时开始计时,物体开始第二次挡光时结束计时。
再利用单片机计算出速度后在显示模块上显示出速度。
然后再设计一个程序使速度超过一个范围时发出蜂鸣警告超时。
硬件:
硬件原理: 光传感器 激光发生装置和接收装置:DH4604。
计数器模块:片内计数方案是指采用单片机的内部计数器完成对电压信号的计数过程。
处理器:处理器是单片机89c51. LCD 显示部分:在正常情况下LED 显示当前速度值,当速度超出一定范围后通过灯光和蜂鸣器进行报警。
光传感器 光电耦合器 计数器 单片机 LCD 显示
器 蜂鸣报警蜂鸣报警蜂鸣报警器
报警模块:采用蜂鸣器与发光二极管作为声光报警器主要器件。
简要说明:
一、尺寸:全长25mm宽10mm高10mm
二、主芯片:三极管
三、工作电压:直流5V
四、特点:电路简单实用,接线简单,蜂鸣器报警音,清脆响亮。
电源模块:采用交流220v|50hz电源转换为直流5v电源模块。
单片机模块:选用p89c51单片机。
软件:
*********************************************************************/
/********************************************************************
说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平
*********************************************************************/
#include<reg52.h> //库文件
#define uchar unsigned char//宏定义无符号字符型
#define uint unsigned int //宏定义无符号整型
/********************************************************************
I/O定义
*********************************************************************/ sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端
sbit DOUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器的输入端/********************************************************************
延时函数
*********************************************************************/ void delay()//延时程序
{
uchar m,n,s;
for(m=20;m>0;m--)
for(n=20;n>0;n--)
for(s=248;s>0;s--);
}
/********************************************************************
主函数
*********************************************************************/ void main()
{
while(1) //无限循环
{
LED=1; //熄灭P1.0口灯
if(DOUT==0)//当浓度高于设定值时,执行条件函数
{
delay();//延时抗干扰
if(DOUT==0)//确定浓度高于设定值时,执行条件函数
{
LED=0; //点亮P1.0口灯
}
}
}
}
/********************************************************************
结束
*********************************************************************/
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar duan[10]={0xc0,0Xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //所需的段的位码
//uchar wei[4]={0XEf,0XDf,0XBf,0X7f}; //位的控制端(开发板) uchar wei[4]={0X80,0X40,0X20,0X10}; //位的控制端(仿真) uint z,x,c,v, date; //定义数据类型
uint dispcount=0;
/******************************************************************
延时函数
******************************************************************/
void delay(uchar t)
{
uchar i,j;
for(i=0;i<t;i++)
{
for(j=13;j>0;j--);
{ ;
}
}
}
/**********************************************************************
数码管动态扫描
*********************************************************************/
void xianshi()
{
/*****************数据转换*****************************/
z=date/1000; //求千位
x=date%1000/100; //求百位
c=date%100/10; //求十位
v=date%10; //求个位
P2=wei[0];
P0=duan[z];
delay(50);
P2=wei[1];
P0=duan[x];
delay(50);
P2=wei[2];
P0=duan[c];
delay(50);
P2=wei[3];
P0=duan[v];
delay(50);
}
/*************************************************************************
主函数
**************************************************************************/ void ExtInt0() interrupt 0 //中断服务程序
{
dispcount++; //每按一次中断按键,计数加一
if (dispcount==9999) //计数范围0-9999
{dispcount=0;}
}
/*************************************************************************
主函数
**************************************************************************/ void main()
{
TCON=0x01; //中断设置
IE=0x81;
while(1)
{
date=dispcount;
xianshi();
}
}
/********************************************************************
结束
*********************************************************************/。