多项式拟合及例题详解
- 格式:ppt
- 大小:291.50 KB
- 文档页数:17

实验作业1用给定的多项式,如y=x3-6x2+5x-3,产生一组数据(xi,yi,i=1,2,…,n),再在yi上添加随机干扰(可用rand产生(0,1)均匀分布随机数,或用rands产生N(0,1)分布随机数),然后用xi和添加了随机干扰的yi作的3次多项式拟合,与原系数比较。
分别作1、2、4、6次多项式拟合,比较结果,体会欠拟合、过拟合现象。
解:编写程序如下:x=1:0.5:10;y=x.^3-6*(x.^2)+5.*x-3;y0=y+rand;f1=polyfit(x,y0,1) %一次多项式拟合y1=polyval(f1,x);plot(x,y,'+',x,y1); %作出数据点和拟合曲线的图形gridtitle('一次拟合曲线')figure(2);f2=polyfit(x,y0,2) %二次多项式拟合y2=polyval(f2,x);plot(x,y,'+',x,y2);gridtitle('二次拟合曲线')figure(3);f4=polyfit(x,y0,4) %四次多项式拟合y3=polyval(f4,x);plot(x,y,'+',x,y3);gridtitle('四次拟合曲线')figure(4);f6=polyfit(x,y0,6) %六次多项式拟合y4=polyval(f6,x);plot(x,y,'+',x,y4);gridtitle('六次拟合曲线')figure(5);程序运行结果如下:f1 = 43.2000 -149.0264f2=10.5000 -72.3000 89.8486f4=0.0000 1.0000 -6.0000 5.0000 -2.5514f6= -0.0000 0.0000 -0.0000 1.0000 -6.0000 5.0000 -2.5514 通过比较拟合后多项式和原式的系数,发现四次多项式和六次多项式系数与原系数最接近。
多项式拟合多项式拟合是数学中一类重要的函数逼近方法,它通过利用多项式函数在已知数据点附近的近似性质,来构造一个逼近原函数的多项式函数。
这种方法在实际问题中有着广泛的应用,比如数据分析、曲线拟合、信号处理等领域。
本文将详细介绍多项式拟合的原理、方法和应用,帮助读者深入了解和应用这一重要的数学工具。
多项式拟合的基本原理是利用已知数据点的坐标值,找到一条多项式曲线,使得该曲线与给定的数据点尽可能接近。
在实际应用中,我们常常会遇到一组散点数据,通过多项式拟合可以用一条平滑的曲线来逼近这些数据点,从而方便我们进行数据的分析和预测。
在进行多项式拟合时,一个关键的问题是如何确定多项式的阶数。
低阶多项式通常不能很好地拟合复杂的数据,而高阶多项式则可能会导致过拟合,使得曲线过度适应训练数据,而在新数据上表现较差。
因此,选择合适的多项式阶数是一个复杂的问题,需要根据具体情况进行调整。
多项式拟合的方法有很多种,其中最常用的是最小二乘法。
最小二乘法通过最小化拟合曲线与数据点的残差平方和来确定最优拟合多项式。
也就是说,我们要找到一条多项式曲线,使得各个数据点到拟合曲线的距离之和最小。
这种方法在处理噪声较小的数据时效果很好,但对于噪声较大的数据则可能受到干扰。
除了最小二乘法,还有其他的多项式拟合方法,如最小化最大偏差法和逆矩阵法。
不同的方法适用于不同的问题和数据类型,读者可以根据自己的需求选择合适的方法。
多项式拟合在各个领域都有广泛的应用。
在数据分析和曲线拟合中,多项式拟合可以用来预测未来的数据趋势、分析数据的周期性和趋势性等。
在信号处理中,多项式拟合可以用来提取信号中的特征、去除噪声和恢复缺失的数据等。
此外,多项式拟合还可以应用于图像处理、机器学习和人工智能等领域。
总之,多项式拟合是一种重要的函数逼近方法,具有广泛的应用。
通过多项式拟合,我们可以利用已知数据点来构造一个逼近原函数的多项式函数,从而方便我们进行数据分析和预测。
三次最佳一致多项式例题当我们谈论最佳一致多项式时,通常是指使用最小二乘法来拟合一组数据点的多项式函数。
在这个过程中,我们希望找到一个多项式函数,使得它与给定的数据点的拟合误差最小化。
以下是一个关于最佳一致多项式的例题:假设我们有以下一组数据点,{(1, 2), (2, 4), (3, 6), (4, 8), (5, 10)}。
我们希望找到一个最佳一致多项式来拟合这些数据。
首先,我们需要确定多项式的阶数。
通常情况下,我们会从一次多项式开始,并逐渐增加阶数,直到我们得到一个满意的拟合结果。
在这个例子中,我们从一次多项式开始。
一次多项式的形式为,y = a0 + a1x.我们可以使用最小二乘法来确定多项式的系数a0和a1。
最小二乘法的原理是最小化拟合误差的平方和。
对于每个数据点,我们可以计算拟合函数与实际数据点之间的垂直距离,即误差。
我们的目标是找到使得所有误差的平方和最小的系数a0和a1。
具体的计算步骤如下:1. 计算x和y的平均值,x_mean = (1 + 2 + 3 + 4 + 5) / 5 = 3,y_mean = (2 + 4 + 6 + 8 + 10) / 5 = 6。
2. 计算x和y与其平均值的差,dx = [1 3, 2 3, 3 3, 4 3, 5 3] = [-2, -1, 0, 1, 2],dy = [2 6, 4 6, 6 6, 8 6, 10 6] = [-4, -2, 0, 2, 4]。
3. 计算dx和dy的乘积的和,dx_dy_sum = (-2 -4) + (-1 -2) + (0 0) + (1 2) + (2 4) = 20。
4. 计算dx的平方和,dx_square_sum = (-2)^2 + (-1)^2 + 0^2 + 1^2 + 2^2 = 10。
5. 计算系数a1,a1 = dx_dy_sum / dx_square_sum = 20 / 10 = 2。

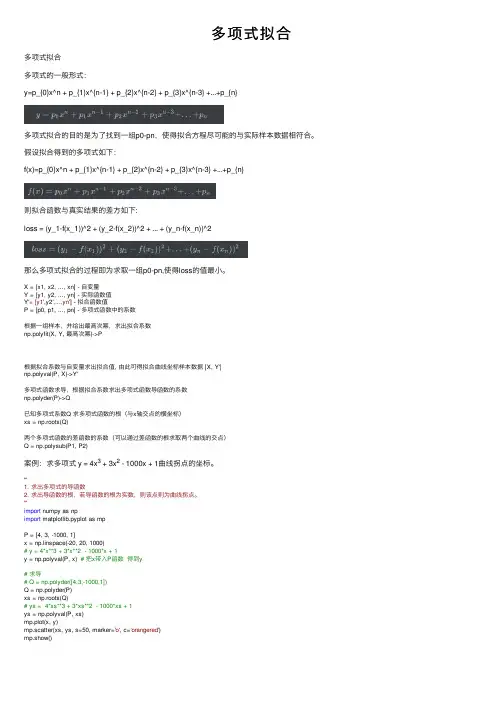
多项式拟合多项式拟合多项式的⼀般形式:y=p_{0}x^n + p_{1}x^{n-1} + p_{2}x^{n-2} + p_{3}x^{n-3} +...+p_{n}多项式拟合的⽬的是为了找到⼀组p0-pn,使得拟合⽅程尽可能的与实际样本数据相符合。
假设拟合得到的多项式如下:f(x)=p_{0}x^n + p_{1}x^{n-1} + p_{2}x^{n-2} + p_{3}x^{n-3} +...+p_{n}则拟合函数与真实结果的差⽅如下:loss = (y_1-f(x_1))^2 + (y_2-f(x_2))^2 + ... + (y_n-f(x_n))^2那么多项式拟合的过程即为求取⼀组p0-pn,使得loss的值最⼩。
X = [x1, x2, ..., xn] - ⾃变量Y = [y1, y2, ..., yn] - 实际函数值Y'= [y1',y2',...,yn'] - 拟合函数值P = [p0, p1, ..., pn] - 多项式函数中的系数根据⼀组样本,并给出最⾼次幂,求出拟合系数np.polyfit(X, Y, 最⾼次幂)->P根据拟合系数与⾃变量求出拟合值, 由此可得拟合曲线坐标样本数据 [X, Y']np.polyval(P, X)->Y'多项式函数求导,根据拟合系数求出多项式函数导函数的系数np.polyder(P)->Q已知多项式系数Q 求多项式函数的根(与x轴交点的横坐标)xs = np.roots(Q)两个多项式函数的差函数的系数(可以通过差函数的根求取两个曲线的交点)Q = np.polysub(P1, P2)案例:求多项式 y = 4x3 + 3x2 - 1000x + 1曲线拐点的坐标。
'''1. 求出多项式的导函数2. 求出导函数的根,若导函数的根为实数,则该点则为曲线拐点。

通过点拟合三次多项式全文共四篇示例,供读者参考第一篇示例:通过点拟合三次多项式是一种常见的数学方法,用于求解一组给定点的最佳拟合曲线。
在现实生活中,这种方法被广泛应用于数据分析、图像处理、模式识别等领域。
在本文中,我们将详细介绍通过点拟合三次多项式的原理、方法和应用,并通过实例演示如何进行拟合。
一、原理通过点拟合三次多项式的核心思想是找到一个三次多项式函数,使得该函数与给定的一组点尽可能接近。
在数学上,一个三次多项式函数可以表示为:f(x) = ax^3 + bx^2 + cx + d其中a、b、c、d是待定系数,x是自变量。
通过给定的一组点(x1, y1), (x2, y2), ..., (xn, yn),我们可以建立一个方程组:f(x1) = a*x1^3 + b*x1^2 + c*x1 + d = y1f(x2) = a*x2^3 + b*x2^2 + c*x2 + d = y2...f(xn) = a*xn^3 + b*xn^2 + c*xn + d = yn通过求解这个方程组,我们可以得到最佳拟合的三次多项式函数。
二、方法在实际应用中,通过点拟合三次多项式通常使用最小二乘法来求解系数。
最小二乘法是一种数学优化方法,通过最小化残差的平方和来求解未知项。
对于通过点拟合三次多项式来说,最小二乘法的目标是最小化以下损失函数:L = Σ(yi - f(xi))^2其中Σ表示总和,yi是实际观测值,f(xi)是通过拟合曲线计算得到的值。
通过对损失函数求导并令导数为0,我们可以得到系数a、b、c、d的最优解。
三、应用通过点拟合三次多项式在实际应用中有着广泛的应用。
在图像处理中,我们可以利用该方法对曲线进行拟合,从而实现曲线的平滑处理和特征提取。
在数据分析领域,通过点拟合三次多项式可以帮助分析师找到数据之间的关联性,进而作出合理的预测和决策。
下面我们通过一个实例来演示如何通过点拟合三次多项式:假设我们有以下一组点:(-2, 2), (-1, 1), (0, 0), (1, 1), (2, 2),我们需要通过这些点拟合出一条最佳曲线。
实验题目: 使用多项式模型进行数据拟合 1 实验目的数据拟合在实际的生产和生活中有着广泛应用。
本实验使用多项式模型对数据进行拟合,目的在于掌握数据拟合基本的基本原理,并且掌握最小二乘法的计算方法,同时学会使用数学的方法来判定数据拟合的情况。
2 实验步骤2.1 算法原理(1)最佳均方逼近多项式设n H 是次数不超过n 次的全体多项式集合。
若存在*()nn P x H ∈,使得**22()||()()||||()()||min n nn n P x H f x P x f x P x ∈-=-则称*()n P x 是()f x 在[a ,b]上的最佳均方逼近多项式。
设()nkn k k P x a x ==∑,则求最佳均方逼近多项式*()n P x ,就是求一组系数(0,1,...,)k a k n =使得22*00()[()][()]min n nnnbbkk k k aak k P x H f x a x dx f x a x dx==∈-=-∑∑⎰⎰由于积分2[()]nbkk ak f x a x dx=-∑⎰是待定系数k a 的多元函数,记做01(,,...,)n I a a a 。
由函数极值条件得到方程组,解方程组,可得到唯一确定的*k a ,从而得到*()n P x 为最小均方逼近多项式。
(2)最小二乘法在最小均方逼近多项式的讨论中,f(x)已知。
但在多数情况下,我们不能确切的指导f(x),只能知道一组数据{,}i i x y ,将最小均方误差的思想用于点集上,便得到曲线拟合的最小二乘法。
设给定一组m 个数量的数据{,}i i x y ,01{,,...}n ϕϕϕϕ=是i x 所在区间的连续函数集合,对于多项式:011,,...nn x x ϕϕϕ===。
取权值函数()1W x =,在公式中未写出。
若存在*()()nk k k S x a x ϕ==∑,使得误差平方和最小,即*22()1[()]min [()]mmiii i s x i i S x y S x y ϕ∈==-=-∑∑,则*()S x 是最小二乘逼近多项式。

多项式拟合在数学和统计学中,多项式拟合是一种常用的数据分析技术,用于拟合一个已知数据集合的多项式函数。
通过多项式拟合,我们可以找到一个最佳拟合曲线,以预测未知数据点的值或者描述数据的趋势。
原理多项式拟合的原理是基于最小二乘法。
最小二乘法通过最小化观测值和拟合值之间的误差平方和来确定最佳拟合曲线。
给定一组数据点(x1, y1), (x2, y2), …, (xn, yn),我们希望找到一个多项式函数 f(x) 来最小化以下误差平方和:min Σ(yi - f(xi))^2其中,xi 和 yi 分别表示观测数据的自变量和因变量,f(xi) 是拟合函数的预测值。
多项式拟合中,常用的拟合函数是多项式函数。
一个一阶多项式函数可以表示为:f(x) = a0 + a1 * x其中,a0 和 a1 是多项式的系数。
一般情况下,我们可以拟合高阶多项式函数,例如:f(x) = a0 + a1 * x + a2 * x^2 + ... + an * x^n实现在实现多项式拟合时,我们可以使用不同的工具和编程语言。
下面以 Python 为例,介绍如何使用 numpy 和 matplotlib 进行多项式拟合。
首先,我们需要准备一组观测数据。
假设我们有以下数据集合:x = [1, 2, 3, 4, 5]y = [2, 3, 4, 5, 6]接下来,我们可以使用 numpy 的 polyfit 函数进行多项式拟合。
polyfit 函数返回的是一个多项式的系数:import numpy as np# 定义观测数据x = [1, 2, 3, 4, 5]y = [2, 3, 4, 5, 6]# 进行一阶多项式拟合coefficients = np.polyfit(x, y, 1)在上面的例子中,我们使用 1 作为拟合的阶数。
根据观测数据,polyfit 函数返回的 coefficients 是一个数组 [a0, a1],其中 a0 和 a1 是拟合函数的系数。
多项式曲线拟合(Polynomial Curve Fitting)监督学习@ author : duanxxnj@@ time : 2016-06-19原文链接多项式特征生成在机器学习算法中,基于针对数据的非线性函数的线性模型是非常常见的,这种方法即可以像线性模型一样高效的运算,同时使得模型可以适用于更为广泛的数据上,多项式拟合就是这类算法中最为简单的一个。
关于多项式回归的应用,这里举个非常简单的例子:一般的线性回归,模型既是参数的线性函数,同时也是输入变量的线性函数,对于一个二维的数据而言,模型的数学表达式如下:如果想要拟合一个抛物面,而不是拟合一个平面的话,那么就需计算输入变量二次项的线性组合,则模型更新为下面这个形式:注意:这里需要说明的是,更新后的模型,虽然是输入变量的二次函数,但是,由于它仍然是参数的一次线性函数,所以它仍然是一个线性模型。
为了说明这个问题,可以假设有一个新的变量,那么就可以将上面的模型重写为下面的这个形式:1. #!/usr/bin/python2. # -*- coding: utf-8 -*-3.4. """5. author :****************6. time : 2016-06-04_14-007.8. 多项式特征生成9.10. """11.12. from sklearn.preprocessing import PolynomialFeatures13. import numpy as np14.15. # 首先生成3x2的原始特征矩阵16. # 即样本数为3,特征数为217. X = np.arange(6).reshape(3,2)18.19. print'原始数据:'20. print X21.22. # 特生变换/特征生成23. # 将原始一阶数据升维到二阶数据24. # 升维方式是: [x_1, x_2] 变为 [1, x_1, x_2, x_1^2, x_1 x_2, x_2^2]25. polyFeat =PolynomialFeatures(degree=2)26. X_transformed = polyFeat.fit_transform(X)27.28. print'特征变换后的数据:'29. print X_transformed1. 原始数据:2. [[01]3. [23]4. [45]]5. 特征变换后的数据:6. [[ 1.0. 1.0.0. 1.]7. [ 1. 2. 3. 4. 6.9.]8. [ 1. 4. 5.16.20.25.]] 1. #!/usr/bin/python2. # -*- coding: utf-8 -*-3.4.5. """6. author :****************7. time : 2016-06-04_16-388.9. 这个例子展示了多项式曲线拟合的特性10.11. 多项式曲线拟合分为两个步骤:12. 1、根据多项式的最高次数,对输入特征向量做特征生成13. 对原来的每一个特征向量而言,可以生成一个范特蒙德矩阵( Vandermonde matrix)14.15. 范特蒙德矩阵的尺寸为:[n_samples , n_degree+1]16.17. 其形式为:18. [[1, x_1, x_1 ** 2, x_1 ** 3, ...],19. [1, x_2, x_2 ** 2, x_2 ** 3, ...],20. ...]21.22. 2、基于第一步生成的范特蒙德矩阵,直接使用已有线性回归模型,就可以实现多项式回归23.24. 这个例子展示了如何基于线性回归模做非线性回归,其实这个也是核函数的基本思想。
f0=2求二次拟合多项式的例题要求二次拟合多项式的例题,我们可以通过给定一组数据点来进行求解。
假设我们有以下数据点:(x1, y1) = (1, 3)。
(x2, y2) = (2, 5)。
(x3, y3) = (3, 7)。
(x4, y4) = (4, 9)。
我们的目标是找到一个二次多项式 y = ax^2 + bx + c,使得这个多项式能够最好地拟合给定的数据点。
首先,我们可以建立一个二次方程的模型,即 y = ax^2 + bx + c。
然后,我们可以将给定的数据点带入这个方程中,得到以下四个方程:(1^2)a + (1)b + c = 3 ----(1)。
(2^2)a + (2)b + c = 5 ----(2)。
(3^2)a + (3)b + c = 7 ----(3)。
(4^2)a + (4)b + c = 9 ----(4)。
我们可以通过解这个方程组来求解出二次拟合多项式的系数 a、b 和 c。
将方程 (1)、(2)、(3) 和 (4) 进行整理,得到:a +b +c = 3 ----(5)。
4a + 2b + c = 5 ----(6)。
9a + 3b + c = 7 ----(7)。
16a + 4b + c = 9 ----(8)。
接下来,我们可以使用消元法或其他求解线性方程组的方法来求解出 a、b 和 c 的值。
这里我们使用高斯消元法来求解。
首先,我们可以通过将方程组 (6)、(7) 和 (8) 分别减去方程(5) 的倍数,消去变量 b,得到新的方程组:3a c = 2 ----(9)。
5a c = 4 ----(10)。
7a c = 6 ----(11)。
然后,我们可以继续消去变量 c,得到新的方程组:2a = 0 ----(12)。
2a = 2 ----(13)。
2a = 4 ----(14)。
从方程 (12)、(13) 和 (14) 可以看出,方程组无解。
这是因为我们选择的数据点并不满足二次拟合的条件,或者说无法用一个二次多项式来完美拟合这些点。
最小二乘法多项式拟合对于给定的数据点N i y x i i ≤≤1),,(,可用下面的n 阶多项式进行拟合,即∑==+++=nk k k x a x a x a a x f 02210)(为了使拟合出的近似曲线能尽量反映所给数据的变化趋势,要求在所有数据点上的残差|)(|||i i i y x f -=δ都较小。
为达到上述目标,可以令上述偏差的平方和最小,即min ])([)(2121=-=∑∑==iiNi iN i y x f δ称这种方法为最小二乘原则,利用这一原则确定拟合多项式)(x f 的方法即为最小二乘法多项式拟合。
确定上述多项式的过程也就是确定)(x f 中的系数n k a k ≤≤0,的过程,根据最小二乘原则,则偏差平方和应该是这些系数的函数,即min ])([)(),,,(212110=-==∑∑==i i Ni i N i n y x f a a a S δ为使上式取值最小,则其关于n k a k ≤≤0,的一阶导数应该为零,即有∑∑∑∑=====⇒=-⇒=-=∂∂Ni i N i i i i N i i i N i y x f y x f y x f a S11110)(0])([0])([2 ∑∑∑∑=====⇒=-⇒=-=∂∂N i i i N i i i i i N i i i i N i i y x x f x y x f x y x f x a S11111)(0])([0])([2∑∑∑∑=====⇒=-⇒=-=∂∂N i i k i N i i ki i i N i k i i i N i k i k y x x f x y x f x y x f kx a S 1111)(0])([0])([2∑∑∑∑=====⇒=-⇒=-=∂∂N i i n i N i i ni i i N i n i i i N i n i n y x x f x y x f x y x f nx a S 1111)(0])([0])([2 将上面各等式写成方程组的形式可有∑∑∑∑∑∑=======++++⇒=Ni i N i n in N i iN i i Ni iN i iy x a x a x a N a yx f 1112211011)(∑∑∑∑∑∑==+=====++++⇒=Ni i i Ni n in Ni iNi ii Ni iiNi iiy x xa x a x a x a yx x f x 111132121011)(∑∑∑∑∑∑==+=+=+===++++⇒=Ni i k i Ni k n in Ni k iNi k ik iNi i k i Ni i k iy x xa xa xa x a y x x f x11122111011)(∑∑∑∑∑∑===+=+===++++⇒=Ni i n i Ni n in Ni n iNi n in iNi i n i Ni i n iy x xa xa xa x a y x x f x112122111011)(写成矩阵形式有⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⋅⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑======+=+==+==+===+=====N i i n i Ni ik i N i i i N i i n k N i ni Ni k n iNi n iNi ni N i k n i N i ki N i k i N i kiN i n i Ni k iNi i N i i Ni niNi k iNi iy x y x y x y a a a a x xxx x x x x x xxx x x x N 111110121111112111111121111上述方程组可以通过克莱姆法则来计算,从而解出各系数n k a k ≤≤0,得到拟合方程。
利用多项式拟合获得汽车发动机外特性曲线的几种方法发动机外特性是汽车动力性计算的主要依据,基本车型的发动机外特性应由制造厂提供。
发动机外特性为非线形曲线,通过多项式拟合的方法可以获得描述发动机外特性的数学方程。
已有研究结果证明标明再工程应用上采用二次方程来描述汽车发动机外特性已具足够精度,即2e e e T an +bn c =+ (1-1)式中:e T——发动机输出扭矩,N m ;e n ——发动机输出转速,r min 。
式(1-1)中系数a ,b ,c 可以由外特性确定,获得途径有多少种: 1.多点拟合法如果已知发动机外特性确定曲线N 个点(ei ei n ,T ),i=1,2,3,……,N,则利用最小二乘法可以获得系数a,b,c 的估计值,令:()()22NN2ei ei ei ei i 1i 1eE T T an+bn c T ===-=+-∑∑由()()()N22ei ei ei ei i 1N 2ei ei ei ei i 1N 2ei ei ei i 1E2an +bn c T n 0aE 2an +bn c T n 0a E 2an +bn c T 0a ===⎫∂=+-=⎪∂⎪⎪∂=+-=⎬∂⎪⎪∂=+-=⎪∂⎭∑∑∑ (1-2) 得N N N N4322ei ei ei ei ei i 1i 1i 1i 1N N N N32ei ei ei ei ei i 1i 1i 1i 1N N N2ei ei eii 1i 1i 1n a n b n c T n n a n b n c T n n a n b N c T ===========⎫⎛⎫⎛⎫⎛⎫++=⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎪⎪⎛⎫⎛⎫⎛⎫⎪++=⎬⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎪⎪⎛⎫⎛⎫⎪++= ⎪ ⎪⎪⎝⎭⎝⎭⎭∑∑∑∑∑∑∑∑∑∑∑ (1-3) 解此线性方程组,即可以求出系数a,b 和c 。
2.三点插值法如果已知发动机外特性曲线上的三个点(ei ei n ,T ),i=1,2,3,则利用拉格朗日插值法可以求出系数a,b 和c 。