汽车电动助力转向虚拟测试系统研究
- 格式:pdf
- 大小:398.65 KB
- 文档页数:3
汽车电动助力转向系统控制策略及仿真研究汽车电动助力转向系统控制策略及仿真研究摘要:随着汽车电动助力转向系统的应用越来越广泛,对其控制策略的研究也变得越来越重要。
本文基于对汽车电动助力转向系统的分析,提出了一种基于滑模控制的控制策略,并进行了仿真研究。
通过与传统的PID控制策略进行对比,结果表明本文提出的滑模控制策略具有更好的控制性能和鲁棒性。
1. 引言汽车电动助力转向系统可以通过电动助力提供额外的转向力,使得驾驶更加轻松灵活。
为了在不同驾驶条件下实现良好的转向性能,需要采用合适的控制策略来调节电动助力转向系统。
2. 汽车电动助力转向系统建模2.1 汽车动力学模型在建模之前,首先要了解汽车的动力学模型,包括车辆质量、惯性矩、悬挂刚度等。
本文假设汽车为四轮驱动、四轮转向的车辆,采用简化的二自由度车辆模型。
2.2 电动助力转向系统模型电动助力转向系统包括电动助力转向机构、电机控制器和传感器等。
本文建立了电动助力转向系统的数学模型,并考虑了其非线性特性。
3. 控制策略设计基于以上的汽车电动助力转向系统模型,本文提出了一种基于滑模控制的控制策略。
滑模控制是一种常用的非线性控制方法,具有较好的鲁棒性和快速响应特性。
本文设计了滑模控制器,并通过仿真验证了其控制性能。
4. 仿真实验与结果分析通过Matlab/Simulink软件进行仿真实验,并与传统的PID控制策略进行对比。
结果表明,基于滑模控制的电动助力转向系统具有更好的响应速度和稳定性。
在不同的驾驶工况下,滑模控制策略能够有效改善转向性能。
5. 结论本文通过对汽车电动助力转向系统的控制策略进行研究和仿真,提出了一种基于滑模控制的策略,并与PID控制策略进行对比。
结果表明,滑模控制策略能够有效改善转向性能,具有较好的控制性能和鲁棒性。
未来,还可以进一步研究优化该控制策略,提高汽车电动助力转向系统的性能通过对汽车电动助力转向系统的研究和仿真实验,本文提出了一种基于滑模控制的控制策略。
电动助力转向系统μ分析与综合控制及试验研究的开题报告开题报告题目:电动助力转向系统μ分析与综合控制及试验研究1. 研究背景电动助力转向系统是车辆驾驶过程中非常重要的子系统之一,其作用在于提供给驾驶员最佳的转向力和转向力矩,辅助驾驶员轻松完成转向操作,提高车辆的可控性和安全性。
目前,随着汽车技术的不断发展,电动助力转向系统逐渐被广泛应用于各类汽车中,而μ分析是一种有效的电动系统控制方法,可以对电动助力转向系统进行深入的分析和优化。
2. 研究内容本研究旨在基于μ分析方法,对电动助力转向系统进行深入研究,主要包括以下内容:(1)建立电动助力转向系统的框图、数学模型和控制环节;(2)采用μ分析方法对电动助力转向系统进行系统分析和稳定性分析,并进行系统优化和控制器设计;(3)搭建电动助力转向系统实验平台,验证μ分析方法的有效性和控制器的性能。
3. 研究方法本研究将采用系统理论、控制理论、信号处理技术等多学科知识来研究电动助力转向系统。
具体采用的研究方法包括:(1)系统建模方法:建立电动助力转向系统的框图和数学模型,分析系统的结构和性能;(2)μ分析方法:对电动助力转向系统进行系统分析,评估系统的稳定性和性能;(3)控制器设计方法:根据μ分析结果,设计电动助力转向系统的控制器,优化系统性能;(4)实验方法:搭建电动助力转向系统实验平台,进行实验验证和结果分析。
4. 研究意义本研究将对电动助力转向系统的分析和控制方法进行深入研究,对提高汽车转向控制的精度和可靠性具有重要的理论和应用价值。
具体意义包括:(1)深入研究电动助力转向系统的特性和性能,为其控制和优化提供理论支持;(2)采用μ分析方法对电动助力转向系统进行稳定性分析和系统设计,提高系统的稳定性和精度;(3)搭建实验平台,验证研究结果的正确性和可行性,为电动助力转向系统的实际应用提供技术支持。
5. 研究计划本研究计划完成以下阶段性任务:(1)准备阶段:收集和整理电动助力转向系统的相关文献资料,熟悉系统的结构和控制原理;(2)建模阶段:建立电动助力转向系统的数学模型和框图,进行系统建模和控制器设计;(3)分析阶段:采用μ分析方法对系统进行稳定性分析和性能优化,获取系统参数和控制器参数;(4)实验阶段:搭建电动助力转向系统实验平台,进行实验验证和结果分析。
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!电动助力转向系统(Electronic Power Steering Sy stem ,EPS )是汽车电子化发展的成果之一,在各国汽车制造业中得到了普遍重视。
EPS 属于一种动力转向系统,比传统动力转向系统具有更高的可控性,能较好地解决汽车转向“轻”和“灵”的矛盾,因此有广泛的应用前景[1]。
对其进行性能仿真研究、建模及施加控制是两大关键问题[2]。
基于A DAMS 软件的虚拟样机技术,可把汽车视为一个由多个相互连接的、彼此能够相对运动的多体系统,其运动学及动力学仿真与以往通常用几个自由度的质量—阻尼刚体(振动)数学模型相比,计算描述能够更加真实地反映整车结构和整车性能,也比其他方法更为直接方便[3]。
由于EPS 控制运算法则的复杂性和整车模型的自由度过多这两个原因,造成仅仅使用一种软件进行基于整车的EPS 系统性能分析是比较困难的。
本文以某多功能商务车为对象,采用ADAM S/Car 建立整车系统多体动力学模型,在M atlab 中建立EPS 控制系统,应用M ATLAB 与ADAM S 软件相联合,将电动助力转向控制系统与整车模型相结合,采用时培成1,姜武华2(1.安徽工程科技学院机械系,芜湖241000;2.合肥工业大学机械与汽车学院,合肥230009)摘要:首先利用机械动力学仿真分析软件ADAMS 建立某多功能商务车整车多体动力学模型;其次在Matlab/S imulink 中设计了PID 控制的电动助力转向控制器,并定义了与ADAMS/Car 环境下车辆模型的数据交换接口;最后将设计的控制器在ADAMS /Car 和Matlab/Simulink 环境下通过输入输出接口实现联合迭代仿真,不断修正控制参数直到得到满意的控制效果。
仿真结果表明,所建立的模型和联合仿真的分析方法是正确的、有效的,为加快开发汽车EPS 系统的控制逻辑提供了理论参考。
第1篇一、实验目的本次实验旨在了解电动助力转向系统(EPS)的工作原理、性能特点以及与传统液压助力转向系统的差异。
通过实验,验证EPS在提高转向效率、降低能耗、提升驾驶舒适性和安全性等方面的优势。
二、实验原理电动助力转向系统(EPS)是一种利用电动机作为动力源的新型动力转向装置。
与传统液压助力转向系统相比,EPS省去了液压泵、油管等液压部件,采用电机直接驱动转向机构,从而实现转向助力。
EPS系统主要由以下几部分组成:1. 信号传感装置:包括扭矩传感器、转角传感器和车速传感器,用于检测驾驶员的转向意图、方向盘转角和车速等信息。
2. 转向助力机构:包括电机、减速器、离合器等,用于根据驾驶员的转向意图和车速,提供相应的转向助力。
3. 电子控制单元(ECU):根据扭矩传感器、转角传感器和车速传感器的信号,控制电机的旋转方向和助力电流的大小,实现实时助力转向。
三、实验内容1. EPS系统组成及工作原理讲解。
2. EPS系统与传统液压助力转向系统的对比实验。
3. EPS系统在不同车速下的转向助力性能测试。
4. EPS系统在转向过程中抗干扰性能测试。
四、实验步骤1. 准备实验设备:EPS系统实验平台、扭矩传感器、转角传感器、车速传感器、数据采集器等。
2. 搭建实验平台,连接实验设备。
3. 根据实验要求,设置实验参数。
4. 进行EPS系统与传统液压助力转向系统的对比实验,记录数据。
5. 在不同车速下进行EPS系统的转向助力性能测试,记录数据。
6. 在转向过程中进行EPS系统的抗干扰性能测试,记录数据。
7. 分析实验数据,得出结论。
五、实验结果与分析1. EPS系统与传统液压助力转向系统的对比实验结果显示,EPS系统在转向效率、能耗、驾驶舒适性和安全性等方面均优于传统液压助力转向系统。
2. EPS系统在不同车速下的转向助力性能测试结果显示,EPS系统在不同车速下均能提供稳定的转向助力,且转向助力大小与车速成正比。
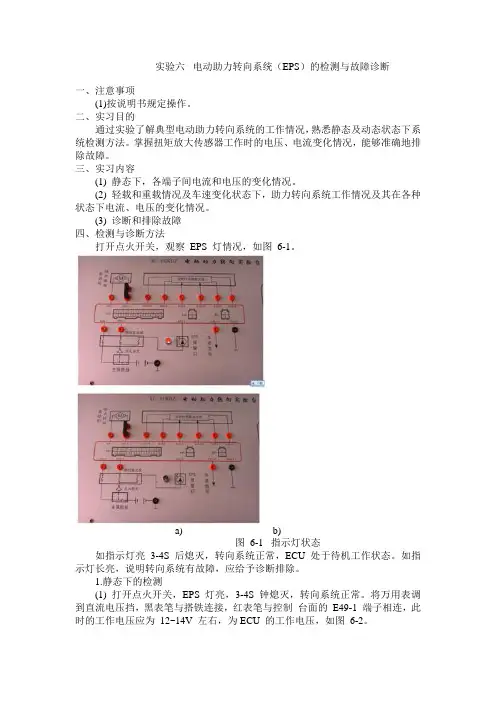
实验六电动助力转向系统(EPS)的检测与故障诊断一、注意事项(1)按说明书规定操作。
二、实习目的通过实验了解典型电动助力转向系统的工作情况,熟悉静态及动态状态下系统检测方法。
掌握扭矩放大传感器工作时的电压、电流变化情况,能够准确地排除故障。
三、实习内容(1) 静态下,各端子间电流和电压的变化情况。
(2) 轻载和重载情况及车速变化状态下,助力转向系统工作情况及其在各种状态下电流、电压的变化情况。
(3) 诊断和排除故障四、检测与诊断方法打开点火开关,观察EPS 灯情况,如图6-1。
a) b)图6-1 指示灯状态如指示灯亮3-4S后熄灭,转向系统正常,ECU 处于待机工作状态。
如指示灯长亮,说明转向系统有故障,应给予诊断排除。
1.静态下的检测(1) 打开点火开关,EPS 灯亮,3-4S 钟熄灭,转向系统正常。
将万用表调到直流电压挡,黑表笔与搭铁连接,红表笔与控制台面的E49-1 端子相连,此时的工作电压应为12~14V 左右,为ECU 的工作电压,如图6-2。
(2) 取下红表笔与E52-1 端子连接,万用表显示12~14V 左右的电压。
它是经过点火开关控制给ECU 的触发等待工作的电压。
(3) 拔下表笔,关闭万用表,做好相应的记录。
2.动态下的检测(1) 检测助力电机工作时的电压将黑表笔插入控制面板的搭铁孔,将红表笔插入E51-1、E51-2检查在转向时ECU 给助力电机提供的工作电压的变化情况,随着转向角度的增大其电压值将由小到大随之变化。
发动机空转、转向盘直行时电压应在5~7V 之间。
(2) 检测助力电机工作时的电流万用表拨到直流电流档位,并将表串入助力电机电路中,调整“车速”旋钮,缓慢转动方向盘,测量电机电流应在0~1.5A。
快速转动方向盘,测量电机电流应在0~2.9A。
(3) 用加载装置给车轮加载,能感觉到不同的转向助力。
图6-2 控制面板各端子的位置3.故障诊断与排除(1) 故障设定在故障控制箱内设定相应的故障。
汽车电动助力转向系统控制策略及仿真研究首先,本文介绍了汽车电动助力转向系统的原理和结构。
汽车电动助力转向系统由电动电机、转向机构和控制单元组成。
电动电机通过转向机构与汽车的转向轴相连接,当驾驶者转动方向盘时,电动电机会提供相应的力量辅助转向。
接下来,本文提出了一种基于PID控制的汽车电动助力转向系统控制策略。
PID控制是一种经典的控制方法,通过不断调节比例、积分和微分三个控制参数,使得系统的输出能够稳定地跟踪期望的轨迹。
在汽车电动助力转向系统中,PID控制可以通过测量转向轴的角度和驾驶者的方向盘输入来自动计算出合适的转向力量,以达到准确转向的目的。
为了验证PID控制策略的有效性,本文利用Simulink工具进行了仿真实验。
仿真实验采用了真实的汽车转向系统参数,通过输入不同的方向盘转动信号,模拟不同的转向操作。
实验结果表明,基于PID控制的汽车电动助力转向系统能够准确地跟踪方向盘输入,并提供适当的转向力量,实现稳定的转向。
最后,本文总结了汽车电动助力转向系统控制策略及仿真研究的主要结果和贡献。
通过研究和仿真实验,本文验证了基于PID控制的汽车电动助力转向系统的有效性和稳定性。
这一研究为汽车电动助力转向系统的设计和控制提供了一定的参考和借鉴。
综上所述,本文对汽车电动助力转向系统的控制策略进行了研究,并进行了相关的仿真实验。
本文的研究结果表明,基于PID控制的汽车电动助力转向系统能够实现准确转向,并具有稳定性和可靠性,为汽车驾驶员提供了良好的转向体验。
但是,仍然有一些问题和挑战需要进一步研究和解决,比如如何提高转向系统的响应速度和抗干扰能力。
对于未来的研究,可以考虑将其他的控制方法应用到汽车电动助力转向系统中,并进一步优化转向系统的性能。
基于LabVIEW的汽车电动助力转向系统测试平台的研究杨仕清
【期刊名称】《客车技术》
【年(卷),期】2012(000)002
【摘要】利用高性能的数据采集设备,结合个人计算机,建立系统硬件平台;采用LabVIEW软件开发平台,再结合相应的驱动程序,开发出集数据采集、测试、存储、分析和显示功能于一体的汽车电动助力转向虚拟测试平台。
该平台的测试结果表明:本虚拟测试系统操作简便、快速,运行可靠,测试精度高,测试成本低,可维护性高,可扩充性好。
【总页数】4页(P34-37)
【作者】杨仕清
【作者单位】昆明云内动力股份有限公司
【正文语种】中文
【中图分类】U463.4
【相关文献】
1.基于Labview的纯电动汽车电力驱动测试系统平台研究(软件部分) [J], 闫亚林
2.基于Labview的纯电动汽车电力驱动测试系统平台研究 [J], 闫亚林;徐亚丹
3.基于LabVIEW的汽车电动助力转向系统测试平台的研究 [J], 杨仕清
4.基于LABVIEW的坦克炮伺服控制系统测试平台研究 [J], 黄丹平;明亚波;汪俊其;郭康
5.基于 LabVIEW 的电动汽车驱动系统测试平台设计 [J], 朱靖;陈舒燕;余朝刚
因版权原因,仅展示原文概要,查看原文内容请购买。
交互式汽车EPS操纵稳定性虚拟实验仿真系统交互式EPS虚拟实验仿真系统1.试验系统的意义和必要性交互式EPS(汽车电动助力转向系统)虚拟实验仿真系统是融和场景环境仿真、多体动力学仿真、交互式反馈控制、数据通讯等学科的综合实验技术,是实验技术的发展反方向和目标,它对于消除EPS 设计过程和控制程序的缺陷,改善EPS与整车性能的匹配,提高EPS 装车试验的安全性和可靠性具有重要意义。
多自由度转向操作反馈系统由多自由度试验平台及控制器、汽车驾驶转向操作相关控制部件、(制动、加速、转向等)多种传感器及数据采集系统等组成。
主要实现影响转向操作的侧倾、横摆等汽车响应参数的稳态和瞬态仿真,模拟驾驶员真实的驾驶触觉、体觉感受和行驶速度变化等对驾驶员转向操作判断的影响,真实再现驾驶员转向操作与汽车运动状态和动力学状态间的对应关系,实现EPS对汽车运动状态和驾驶员判断、操作的实时输入、输出的影响模拟和试验仿真,为EPS的设计、实验和优化奠定基础。
道路场景虚拟系统由视频和音频系统等组成。
其中视频系统由3通道显示系统组成,扩大虚拟环境的视野范围,能够实时处理道路环境和汽车模型、动画生成与渲染、数字视频和音频等模态综合和数据信息的生成,让驾驶实验者沉浸在一个虚拟的道路驾驶环境中,感受到接近于真实效果的视觉、听觉的驾驶体验,为EPS助力系统的真实操作实验提供支撑。
实验数据记录系统主要完成试验现场录像和实验数据的采集和记录,为EPS试验后期的转向过程和稳定性分析,并为二次实验仿真验证提供数据资源。
2.技术指标要求2.16自由度运动平台2.1.1总体技术参数负荷:1000kg平台尺寸:1.6m×1.6m升降行程:根据实际要求确定最低运动速度:0.8毫米/秒最高运动速度:400毫米/秒加速度:0.7G重复定位精度:±0.3毫米绝对定位精度:±0.3毫米水平位移:±300毫米最大倾角:±30度额定工作压力:14兆帕连接方式:上下台面均为球铰连接状态监视和安全保护功能2.1.2液压伺服系统技术参数:(1)液压缸技术参数:(2)伺服比例阀技术参数:安全保护装置(3)液压站及附件技术要求油泵最大供油压力:14Mpa油泵最大流量:100L/min电动机工作电压:380v电机总功率:22kw空间尺寸:1500(长)x1200(宽)x1600(高)配置:16L蓄能器、风冷却器、高低压过滤器、不锈钢油箱(600升)等供油压力、功率等技术参数需根据实际情况调整。
汽车EPS虚拟测试系统研究陈雷【摘要】文中设计了基于LabVIEW的汽车EPS虚拟测试系统,该系统运用NI USB-6008数据采集卡采集EPS运行信号,利用Lab-VIEW软件来将各种信号进行相应的显示,通过对各种信号的处理,实现对EPS运行状况的分析和评价,并以此来达到对EPS实时检测的目的.【期刊名称】《黑龙江科技信息》【年(卷),期】2015(000)015【总页数】2页(P63-64)【关键词】汽车;EPS;虚拟仪器;LabVIEW;数据采集【作者】陈雷【作者单位】黑龙江工程学院,黑龙江哈尔滨 150000【正文语种】中文汽车EPS即汽车的电动助力转向系统,它由电动机产生的电驱动力提供转向助力,以减轻驾驶员操纵转向盘的劳动强度。
电动助力转向装置相当于一个驾驶员转向盘操纵力放大器,它不仅可以使转向操纵灵活、轻便,增大了在汽车设计时对转向器结构形式选择的灵活性,而且能够吸收路面对前轮产生的冲击。
一些乘用车由于发动机前置及前轮驱动,使其前轴负荷增加,转向的轻便性就成了必须解决的问题,又因为汽车EPS具有重量轻,安装方便,工作特性好,系统安全可靠性强等诸多优点,所以许多乘用车都装备了电动助力转向系统。
为满足对数据的准确性需求,文中利用LabVIEW软件编写上位机界面,对EPS的各种物理信号进行实时测试及离线测试,实现了数据采集、显示存储等功能,使上位机界面更加友好。
电动式电子控制动力转向系统按电动式转向助力机构的位置不同分,有转向轴助力式,转向器小齿轮助力式和齿条助力式等几种形式。
转向助力装置的动力来自电动机,电子控制器根据相关传感器检测到的转向和车速参数来控制电动机转矩的大小和转动方向,并通过电磁离合器和减速机构使汽车转向机构能得到一个与行驶工况相适应的转向作用力[1]。
数据采集系统主要用于协助工程技术人员及时掌握汽车EPS的各项运行状况,因此上位机程序需满足:(1)简洁易读,并且界面友好、操作简捷;(2)在数字显示采集信息的同时,拥有辅助图像与表格,便于使用者观测;(3)及时准确的反应汽车EPS的各项指标的变化情况。
汽车电动助力转向系统控制策略研究及试验台方案设计的开题报告1.选题背景及意义随着自动驾驶技术的发展和普及,汽车的电动助力转向系统显得尤为重要。
电动助力转向系统不仅可以提高车辆的安全性和稳定性,还能够降低驾驶者对车辆的操作难度。
而对于电动助力转向系统的控制策略的研究和试验台方案设计,对于提高汽车整体效能和实现自动驾驶技术的发展都具有重要的意义。
2.研究内容和方法本研究将针对车辆的电动助力转向系统控制策略进行研究和试验台方案设计。
具体内容如下:(1)电动助力转向系统控制策略研究:该部分将研究电动助力转向系统的工作原理和控制策略,探讨如何优化转向系统的控制策略,提高转向系统的效率、安全性和稳定性。
(2)试验台方案设计:该部分将根据研究的结果,在实际车辆上设计和搭建电动助力转向系统试验台,测试电动助力转向系统在不同条件下的控制策略和性能。
3.预期结果及应用价值预期结果:通过本研究,可以分析和研究电动助力转向系统的控制策略和性能,设计出可靠的试验台方案,并进行实验验证,获得相关数据和结论,从而得到如下预期结果:(1)电动助力转向系统控制策略的优化与改进;(2)试验台方案的实现与验证。
应用价值:本研究的成果可以为车辆制造商和自动驾驶技术开发者提供有价值的参考意见,进而提高车辆的安全性、稳定性和自动驾驶的实现效率,具有一定的社会和经济效益。
同时,也可推动电动助力转向系统控制策略的研究和发展,为智能交通和智能汽车等领域的发展提供支持。
4.研究计划及进度安排研究时间:2021年3月至2022年3月。
研究过程及进度安排如下:阶段一:文献综述与理论分析(2021.03~2021.06)1. 文献综述,了解国内外关于电动助力转向系统控制策略的研究进展,并分析其中的优点和不足之处。
2. 理论分析,对电动助力转向系统进行建模,分析转向系统的控制策略和转向过程的特征,为后面的实验设计打下基础。
阶段二:试验台方案设计(2021.07~2021.12)1. 试验系统硬件设计,选择相应的传感器和执行器,并设计相应的控制电路。
电动助力转向系统测试1. 简介电动助力转向系统是现代汽车的一项重要技术,它通过电动助力转向机构来辅助驾驶员进行车辆转向操作。
该系统主要由电动助力转向机构、传感器、控制单元和转向手柄等组成。
为了确保电动助力转向系统的正常工作,需要进行系统测试。
2. 测试目的电动助力转向系统测试的主要目的是验证系统在各种工作条件下的性能和可靠性。
通过测试,能够评估系统的灵敏度、稳定性、精确性和可操作性,并发现潜在的故障和问题。
测试还可以验证系统是否符合相应的标准和规范,并对需要改进的地方进行优化。
3. 测试内容3.1 功能测试功能测试是电动助力转向系统测试的关键内容之一。
它主要包括以下几个方面的测试:•助力转向功能:测试系统在不同速度下提供的转向助力是否符合要求,确保驾驶员可以轻松、平稳地进行转向操作。
•转向返回功能:测试系统在驾驶员释放转向手柄后,能否迅速返回中立位置,确保转向的准确性和稳定性。
•偏航修正功能:测试系统在行驶过程中是否能自动修正车辆偏航,确保车辆保持在正确的行驶轨迹上。
3.2 稳定性测试稳定性测试旨在评估电动助力转向系统在各种工况下的稳定性和可靠性。
通过模拟不同路况和转向动作,测试系统的响应速度、抗干扰能力和稳定性,并确保系统能够在各种复杂的驾驶情况下保持正常工作。
3.3 故障诊断测试故障诊断测试是为了验证电动助力转向系统对故障的诊断能力。
通过模拟各种故障场景,检测系统对故障的识别和报警功能,并确保系统能够快速准确地诊断和处理故障,保证驾驶员的安全。
3.4 耐久性测试耐久性测试是为了评估电动助力转向系统在长时间使用和复杂工况下的可靠性。
通过模拟长时间行驶和频繁转向操作,测试系统的耐久性和稳定性,并确定系统的使用寿命和维修周期。
4. 测试方法电动助力转向系统测试可以采用实车测试和模拟测试相结合的方法。
•实车测试:通过在真实道路上进行测试,模拟不同的驾驶情况和路况,评估系统的性能和稳定性。
•模拟测试:利用专门设计的模拟设备,模拟各种工况和故障场景,进行系统性能和可靠性测试。
汽车电动助力转向虚拟测试系统研究的开题报告一、研究背景随着电动汽车的快速发展,电动助力转向系统已经成为电动汽车重要的组成部分之一,其中包括电动液压助力转向系统和电动机直接驱动转向系统,它们被广泛应用于各种类型的电动汽车。
电动助力转向系统可以提高驾驶者的操控感,提高汽车的稳定性和安全性,在汽车制造和使用中的地位和作用不可或缺。
然而,电动助力转向系统在设计和开发中会受到诸多因素的影响,例如系统的结构、参数的选择、传动效率和系统的可靠性等问题,这些问题需要通过实验来解决,但实验的成本和时间都比较高,因此建立一个虚拟测试系统来模拟实际情况以及对电动助力转向系统进行仿真分析是十分必要的。
二、研究目的本研究旨在建立一种汽车电动助力转向虚拟测试系统,利用计算机模拟技术对电动助力转向系统进行仿真分析,通过模拟不同条件下电动助力转向系统的运行,研究系统的结构与参数的选取、传动效率和系统的可靠性等问题,最终实现对电动助力转向系统的优化设计与分析。
三、研究内容1、基于汽车电动助力转向的结构和工作原理,建立系统的数学模型,包括机械模型和控制模型。
2、根据数学模型,利用有限元分析法和控制系统仿真技术,建立汽车电动助力转向的虚拟测试系统。
3、通过改变电动助力转向系统的结构和参数等条件,对虚拟测试系统进行仿真分析,得到系统的稳态和动态响应特性。
4、利用仿真结果,对电动助力转向系统进行优化设计,得到系统的最佳结构与参数组合。
5、利用虚拟测试系统验证优化方案的可行性和有效性,从而提高电动助力转向系统的效率和稳定性。
四、研究方法与技术1、使用CAD软件和有限元分析软件,建立汽车电动助力转向的数学模型。
2、使用Simulink软件和Stateflow软件,建立电动助力转向的控制系统模型。
3、使用MATLAB编程语言,开发电动助力转向的仿真平台。
4、使用基于控制仿真的优化算法,实现电动助力转向系统的优化设计。
五、研究意义本研究可以帮助更好地理解汽车电动助力转向的结构和工作原理,通过建立虚拟测试系统对其进行仿真分析,得到系统的稳态和动态响应特性,从而为电动助力转向的优化设计提供理论基础和技术支持。
基于CarSim的电动助力转向系统仿真与硬件在环验证一、本文概述随着汽车工业的快速发展,电动助力转向系统(Electric Power Steering, EPS)已成为现代车辆的重要组成部分。
EPS系统不仅提高了驾驶的便捷性和舒适性,同时也对车辆的操纵稳定性和安全性起着至关重要的作用。
然而,EPS系统的设计和优化面临着众多挑战,包括系统性能的优化、安全性的保障以及成本的控制等。
因此,对EPS系统进行精确而高效的仿真分析以及硬件在环验证成为了研究和开发过程中的关键步骤。
本文旨在介绍基于CarSim的电动助力转向系统仿真与硬件在环验证的研究方法和技术。
本文将概述EPS系统的基本原理和结构,以及其在车辆动力学中的作用。
本文将详细介绍CarSim仿真软件在EPS 系统仿真中的应用,包括建模过程、仿真参数设置以及仿真结果的分析和处理。
接着,本文将探讨硬件在环验证的重要性,以及如何在CarSim环境中实现硬件在环验证。
本文将通过实例分析,展示基于CarSim的EPS系统仿真与硬件在环验证的实际应用效果,为EPS系统的设计和优化提供有效的技术支持。
通过本文的研究,旨在为EPS系统的研究者和工程师提供一种基于CarSim的仿真与硬件在环验证的方法论,以提高EPS系统的开发效率和性能优化,为现代汽车工业的发展做出贡献。
二、EPS系统原理及CarSim仿真建模电动助力转向系统(EPS,Electric Power Steering)是一种先进的汽车转向系统,旨在通过电机提供辅助转向力矩,以提高驾驶的舒适性和安全性。
EPS系统主要由转向传感器、车速传感器、电机、电子控制单元(ECU)等组成。
当驾驶员转动方向盘时,转向传感器检测方向盘的转角和转速,车速传感器则检测车辆的速度。
这些信息被传递给ECU,ECU根据预设的控制策略计算出所需的辅助转向力矩,并控制电机产生该力矩,从而帮助驾驶员更轻松、更稳定地驾驶汽车。
为了对EPS系统进行仿真分析,我们采用了CarSim软件。
基于整车多体动力学模型的电动助力转向虚拟试验研究的开题报告一、研究背景及意义在现代汽车发展的过程中,为了提高车辆的操控性和驾驶舒适性,电动助力转向系统逐渐成为汽车市场上的主流趋势。
与传统液压助力转向系统相比,电动助力转向系统具有更好的动态响应性能和能量利用率,同时减少了能源浪费和轻质化优势显著等特点,因此重要程度不亚于其他核心部件。
然而,电动助力转向系统的设计和虚拟试验研究受到现有试验手段的限制,提高其设计和研究效率、降低开发成本具有重要的现实意义和经济价值。
电动助力转向系统在车辆动力学性能、悬挂系统和操控系统中都具有重要的作用,因此,对基于整车多体动力学模型的电动助力转向虚拟试验研究具有十分必要的背景和意义。
通过建立准确的整车多体动力学模型,可以模拟车辆在各种路面条件、行驶状态和操控操作下的综合性能,同时将模型与电动助力转向系统耦合,可以有效分析转向系统对整车操控性能的影响,进而优化转向系统设计,提高车辆的操控性能和安全性能。
二、研究内容和方法本研究主要运用整车多体动力学模型和虚拟试验技术,对电动助力转向系统进行深入研究,具体研究内容和方法如下:1.建立整车多体动力学模型通过采用ADAMS软件,建立完备准确的整车多体动力学模型,包括车辆结构、悬挂系统、传动系统和车轮系统等多个组成部分,实现对车辆在不同路面条件、行驶状态和操控操作下的动力学性能模拟和分析。
2.建立电动助力转向系统模型在整车多体动力学模型的基础上,建立电动助力转向系统模型,包括电动助力转向器、电机、控制器和传感器等多个组成部分,实现对转向系统在不同条件下的工作状态模拟和分析。
3. 转向系统操控性能模拟和虚拟试验基于整车多体动力学模型和电动助力转向系统模型,进行一系列转向系统操控性能的模拟和虚拟试验,分析转向系统与车辆操控行为之间的耦合关系,评估转向系统对车辆操控性能的影响。
4. 转向系统优化设计针对转向系统在转向响应、防抖动和系统鲁棒性等方面存在的问题,实现转向系统的优化设计,提高车辆操控性能和安全性能。
汽车电动助力转向虚拟测试系统研究
张德明;李伟;吴光强
【期刊名称】《工业仪表与自动化装置》
【年(卷),期】2006(000)006
【摘要】针对目前汽车电动助力转向系统和虚拟测试技术发展的现状,在LabVIEW软件不直接支持第三方数据采集卡的背景下,提出了基于LabVIEW软件的单片机、PC机串口通信的测试方案,并成功开发了该虚拟测试系统.利用该测试系统对汽车电动助力转向相关性能进行了测试,结果表明,测试系统具有操作简便、工作可靠、开发成本低等优点.对相关虚拟测试系统的开发具有一定的借鉴价值.【总页数】3页(P33-35)
【作者】张德明;李伟;吴光强
【作者单位】同济大学,汽车学院,上海,201804;重庆交通大学,机电与汽车工程学院,重庆,400074;同济大学,汽车学院,上海,201804
【正文语种】中文
【中图分类】U463.4
【相关文献】
1.汽车电动助力转向虚拟测试系统研究 [J], 李伟;张德明
2.汽车EPS虚拟测试系统研究 [J], 陈雷
3.汽车自动变速器虚拟测试系统研究 [J], 黄旭华
4.汽车电动助力转向系统研究 [J], 李胜超;张智飞;刘永健
5.汽车电动助力转向系统研究 [J], 李胜超;张智飞;刘永健
因版权原因,仅展示原文概要,查看原文内容请购买。
・316・计算机测量与控制.2007.15(3) Computer Measurement &Control 自动化测试中华测控网收稿日期:2006-05-06; 修回日期:2006-06-19。
基金项目:重庆市教委基金资助项目(040408)。
作者简介:李 伟(1965-),重庆人,教授,博士后,主要从事汽车电子控制方向的研究。
文章编号:1671-4598(2007)03-0316-03 中图分类号:TP274;U46314 文献标识码:B汽车电动助力转向虚拟测试系统研究李 伟,张德明(重庆交通大学机电与汽车工程学院,重庆 400074)摘要:汽车电动助力转向是一种利用电动机直接为汽车转向系统提供助力的高新技术,代表着未来汽车动力转向技术的发展方向;从而迫切需要一种方便、快捷的EPS 系统测试仪器,而传统的测试系统在便捷性、可靠性、可扩展性方面都具有一定的局限;针对这种情况,文中应用目前最流行的虚拟仪器软件开发平台LabVIEW 软件开发汽车电动助力转向系统虚拟测试仪器;考虑到LabVIEW 软件不直接支持第三方数据采集卡的背景,提出了基于LabV IEW 软件的单片机、PC 机串口通信的测试方案,并成功开发了该虚拟测试系统;测试结果表明,该测试系统具有操作简便、工作可靠、开发成本低等优点,对相关虚拟测试系统的开发具有一定的借鉴价值。
关键词:电动助力转向;LabV IEW ;串口通信;虚拟测试R esearch on Virtual test System of Automobile Electric Pow er SteeringLi Wei ,Zhang Deming(College of Machine -Electronic and Automobile Engineering ,Chongqing Jiaotong University ,Chongqing 400074,China )Abstract :Automobile electric power steering (EPS )is one superior technique which supplies power to steering system of automobile wit h motor directly 1it has become one sign of fut ure development direction of high technique of automobile 1So ,a convenient and quickly testing inst rument is needed 1While t he current testing instrument s are not so satisfactory ,for t his reason t he virtual test system based on LabVIEW software is developed 1Under t he grounds t hat LabVIEW can not directly support data acquisition board of t hird party 1a test plan t hrough serial communication between single board and PC wit h LabVIEW is presented 1Some functions of automobile elect ric power steering system were tested by t his virt ual testing system ,t he test result showed t he virtual test system has many virtues such as convenient ,stabili 2zation and low expenses 1So ,it has some value of using for reference 1K ey w ords :EPS ;LabVIEW ;series communication ;virtual testing0 引言汽车电动助力转向(Electric power steering 简称EPS )是一种用电动机直接为汽车转向系统提供助力的高新技术,具有传统液力助力转向所不具有的低能耗、环保、高主动安全性等优点,代表着未来汽车电动助力转向技术的发展方向。
目前,国外该项技术趋近成熟,国内则处于研究试验阶段,从而迫切需要一种方便、快捷的EPS 系统测试工具。
而目前所采用的传统测试系统在便捷性、可靠性、可扩展性方面都具有一定的局限,针对这种情况作者在熟悉运用美国国家仪器公司(NI )所开发出的虚拟仪器软件开发平台———LabV IEW 的基础上和在LabV IEW 软件不直接支持第三方数据采集卡的背景下,自制数据采集卡,利用上、下位机通过串口通信的办法,开发出一套高效率的EPS 虚拟测试仪器。
所谓的虚拟仪器,由美国国家仪器公司(N I )于1986年首次提出,就是用户在通用计算机平台上,根据需求定义和设计仪器的测试功能。
虚拟仪器的概念打破了传统仪器由厂家定义,用户无法根据自己的要求而改变其相应功能的工作模式,充分利用了计算机技术来实现和扩展传统测试系统和仪器的功能。
“软件就是仪器”是虚拟仪器概念最简单、也是最本质的表述。
1 测试系统硬件开发111 EPS 工作原理EPS 是一种直接依靠电机提供转向助力的动力转向系统,根据电机布置位置的不同,分为转向轴助力式(Column Type)、小齿轮助力式(Pinion Type )、齿条助力式(Rack Type )3种型式。
但其基本原理是相同的。
其系统结构如图1所示。
图1 电动助力转向系统结构图所谓的EPS 系统就是在原机械转向系统的基础上,增加了车速传感器、转矩转角传感器、电子控制器、电动机及其传动机构,直接利用电动机驱动转向轴提供助力转矩。
转矩转角传感器测量转矩与方向盘转角大小并和车速信号一起送入电子控制器。
控制器根据得到的信号判断是否助力以及助力的方向。
若需要助力,则依照既定的控制策略计算电机助力转矩的大小并输出相应控制信号给驱动电路。
后者提供相应的电压或者电流给电动机。
电动机输出的转矩通过传动机构驱动转向轴第3期李 伟,等;汽车电动助力转向虚拟测试系统研究 ・317・ 中华测控网转动从而实现助力作用。
112 EPS 虚拟测试系统的组成测试系统总体设计图如图2所示,包含两个部分的硬件开发:进行数据处理的上位机(PC 机)和具有数据采集功能的下位机。
PC 机通过串口进行数据传输,检测出方向盘扭矩等数据并显示,达到测试目的。
图2 系统总体设计框图113 通信模块开发通信模块在测试系统中起到将下位机采集到的数据传送给上位机(PC 机)进行数据处理和分析的功用,是上、下位机的联系桥梁。
相对于PCI 、USB 等总线来说,RS -232C 总线接口标准具有简单易学、开发成本低等优点,接口电路如图3所示。
图3 RS232电平转换接口电路图114 电流与扭矩传感器电流传感器:用来测量流过助力电机的电流的大小,是进行反馈控制的关键信号。
测试系统中选用KMC20电流传感器,内置永久磁铁,可检测20A 的电流。
在25℃,10ms 条件下,可通过300A 的瞬间电流。
扭矩传感器:扭矩传感器有接触式与非接触式两种。
接触式扭矩传感器,在转向轴位置加一扭杆,通过测量扭杆的变形得到转矩。
非接触式扭矩传感器,内部有一对磁极环,其原理是:当输入轴与输出轴之间发生相对扭转位移时,磁极环之间的空气间隙发生变化,从而引起电极的电磁感应系数变化,此种扭矩传感器的优点是体积小,精度高,缺点是成本较高。
115 电子控制单元本测试系统选用了一种通用的、较高性价比,带有4路PWM 脉宽调制功能、2路AD 转换器功能的P HIL IPS 公司生产的P HIL IP768单片机。
2 测试系统软件开发目前世界上3个最具代表性的虚拟仪器开发平台是美国N I 公司的LabWindows/CV I 、LabVIEW Laboratory Virtual Instrument Engineering Workbench ———实验室虚拟仪器工程平台)和HP 公司的HP V EE (现在称为Agilent V EE )。
本虚拟测试系统采用目前最流行、功能最强的LabVIEW 软件开发平台。
软件程序部分主要包括串口通信、数字滤波、标定、数据保存、打印、显示等功能模块。
虽然不同的通信协议(串口通信、通用接口总线GPIB 、VXI 等)并不互相兼容,但在Labview 中,V ISA (虚拟软件体系结构)可以非常方便地服务与包含多功能的交叉通信协议的程序编制,用户可以运用V ISA 进行串口通信。
V ISA 库中的串口通讯函数:本文用到的主要的串口通讯函数调用路径为:Functions >>Instrument I/O >>V ISA >>V ISA Ad 2vanced 》In.terface Specific >>Serial 中。
a1V ISA Configure Serial Port 节点(如图4所示)图4 VISA Configure Serial Port 节点该节点主要用于串口的初始化。
主要参数意义如下:V ISA resource name :VISA 资源名称,本文指串口号。
baud rate :波特率,默认为9600。
data bits :一帧信息中的位数,Labview 中允许5、8位数据,默认值为8位。
stop bits :一帧信息中的停止位的位数,可为1位、1位半或2位。
Parity :奇偶校验设置。
可为无校验、奇校验或偶校验。
flow control :该参数数据类型为簇,用于串行通讯中的握手方式。
b 1VISA Read 节点(如图5所示)。
图5 VISA Read 节点该节点为串口读子V I ,为本文中的主要节点,将串口中的数据读出,然后利用LabV IEW 的强大数据处理功能对其进行分析处理。
主要参数意义如下:V ISA resource name 同上。
byte count :用于设置所要读的字符数。
由于LabV IEW 的串行通讯子V1只允许对字符串的读写,因此本文中在进行数据处理时,必须要实现字符串与数字之间的正确转换。
此外,若要读入当前串口中的所有字符,则要执行“V ISA Sytes at Serial Port ”子V I ,用以确定将要读入的确切的字节数,然后将其输出作为V ISARead 节点的输入即可。