WIRELESS SENSOR NETWORKS FOR SECURITY ISSUES AND CHALLENGES
- 格式:pdf
- 大小:335.21 KB
- 文档页数:26
The Greenhouse Environment Monitoring System Based on Wireless Sensor Network TechnologyΙ..INTRODUCTIONПZIGBEE TECHNOLOGYWireless sensor network(WSN) integrates the sensor network techonology, information processing technology and network communication technology with the feature of small size, low cost and easy maintenance, which has a wide application in the area of environment data collection,security monitoring and target tracking.无线传感器网络(WSN)集成了传感器网络的技术,信息处理技术和网络通信技术,具有体积小,成本低,维护方便的特点,在环境数据采集,安全监控和跟踪目标领域具有广泛的应用。
It comprises a great many wireless sensor nodes deployed in the monitoring region, and through wireless communication a multi-hop self-organizing network system is formed.它包括许多部署在监测区域的无线传感器节点,并且通过无线通信一个多跳的自组织网络系统形成了。
Its role is to coordinate the perception , acquisition and process of the information of its perceptual objects within the area covered by the network, and returned data to the observer.At present, large amount of widely-distributed electronic detection devices and implementing facilities are greatly used in greenhouse production , resulting in intertwining cables(相互交织的电缆)in the greenhouse production .目前,大量分布广泛的电子检测设备和执行设备被广泛地运用在温室生产中,导致了温室生产中存在相互交织的电缆。

摘要在无线传感器网络中,介质访问控制(MAC)协议决定了无线信道的使用方式,在传感器节点之间分配有限的无线通信资源,用来构建传感器网络系统的底层基础结构,对传感器网络的性能有较大影响。
相对于有线网络,无线环境下的MAC技术要面对更多的问题,尤其对于能量受限、频率资源宝贵和网络拓扑结构动态变化的无线传感器网络而言,设计一种节能高效的MAC协议至关重要。
本文从网络信道分配方式的角度,对MAC层协议进行了分类,介绍了几种比较典型的MAC协议,并对它们进行了分析比较;在对MAC层能量消耗的主要原因进行分析的基础上,对基于竞争机制的MAC协议中的退避机制进行了探讨,通过借鉴无线网络中相关的退避算法,给出了一种无线传感器网络MAC层退避机制的改进方案。
改进的退避算法的基本思想是通过加入初始竞争窗口的参数,采用时隙利用率对当前信道的忙闲状态进行评估,使节点能够根据当前网络信道的状况来调整其竞争窗口的大小,减少发送数据冲突的同时,提高了能量利用率和系统吞吐率。
仿真中,本文将改进的退避方案在无线传感器网络基于竞争机制的具有代表性的MAC层协议S-MAC中加以应用,完成了改进算法在NS-2中的仿真实现,实验表明改进后的退避方案在能量消耗、吞吐量等方面的性能有很好的提高。
本文最后对所做工作进行了总结,并提出了今后的研究方向,如在硬件实验平台上进行实际性能的测试,对改进算法进行进一步的探讨,使之能适应不同拓扑的网络结构等。
关键词:无线传感器网络MAC协议竞争机制退避算法AbstractIn wireless sensor networks,medium access control (MAC) protocols allocate limited radio resource among sensor nodes and construct infrastructure. MAC protocols have a great influence on the performance of wireless sensor networks. Compared to cable networks, MAC technology in wireless condition faces more problems, especially for wireless sensor networks with constrain of energy, valuable resources of the frequency and dynamic changes of network topology, so it is crucial for the design of MAC protocols to achieve a highly energy-saving and efficient performance.Firstly, the analysis and compare of the typical MAC protocols (IEEE802.11、S-MAC、IEEE802.15.4 etc.) are introduced in this thesis. Then, based on the analysis of the energy consumption and performance evaluation indicators of MAC protocols, the thesis discusses the backoff strategy in MAC protocols with competition mechanism, and proposes a new backoff strategy The new backoff strategy brings forward a conception that the competition window changes dynamic. According to the new algorithm, the node in WSN can adjust its competition window adaptively based on the evaluation of the current network channels condition. The essential idea of the improved backoff algorithm is to evaluate the busy condition of the current channel according to the use rate of time slots, by adding a new parameter to the new algorithm which decreases the packets collision as well as improves the energy efficiency and the network throughput. The thesis applies the new algorithm into S-MAC protocol, which is a representation of MAC protocols with competition mechanism, and carries it out in NS-2, a network simulation tool, for simulation. The simulation results show that, in contrast with S-MAC protocol, the new algorithm puts up better performance on energy saving and mean throughput of the wireless networks.Finally, the thesis draws conclusions by summarizing the main contributions of the research and present directions of future work including its implement on hardware platform for experiments to test its practical performance, making it adaptive for other network topology by further study.Keyword: Wireless Sensor Networks MAC protocol Competition Mechanism Backoff Algorithm目录摘要 (I)Abstract (II)1 引言1.1 课题的背景 (1)1.2 研究现状及意义 (3)1.3 本文的研究工作和组织结构 (4)2 无线传感器网络MAC协议的分析2.1 无线传感器网络协议体系 (6)2.2 无线传感器网络现有MAC协议分析 (7)2.3 MAC协议设计的关键问题 (15)2.4 本章小结 (16)3 MAC层协议中改进退避方案的提出与设计3.1 基于竞争机制的MAC协议相关理论 (18)3.2 MAC层协议退避算法分析及改进 (20)3.3 本章小结 (37)4 改进算法的仿真实现与性能分析4.1 改进算法的仿真测试 (38)4.2 算法性能分析 (45)4.3 本章小结 (49)5 总结 (50)致谢 (52)参考文献 (53)1 引言1.1 课题的背景无线传感器网络(Wireless Sensor Networks,WSN)作为计算、通信和传感器三项技术相结合的产物,是一种全新的信息获取和处理技术,被认为是21世纪最重要的技术之一,它将会对人类社会未来的生活方式产生巨大影响。

无线传感器网络技术的发展随着物联网时代的来临,无线传感器网络技术得到了广泛的应用。
它是人们在社会、经济、环保等领域中探索解决问题的一种有效手段,也是未来智能城市建设的重要基础。
一、无线传感器网络技术的概述无线传感器网络(Wireless Sensor Network,WSN)是由大量无线传感器节点组成的网络,是将传感器、处理器和通信技术融合在一起的高新技术。
它通过传感器节点采集环境信息,通过通信模块将信息传送到决策中心,实现对环境进行感知、监测、控制等操作。
二、无线传感器网络技术的发展历程无线传感器网络技术在20世纪80年代开始,随着计算机和通信技术的发展而不断进步。
在20世纪90年代初,无线传感器网络开始应用于石化工业、农业、自然环境监测等领域。
2000年初,美国西北大学成立第一个无线传感器网络实验室,推动了该领域的发展。
近年来,在无线通信技术、自组织网络技术、传感器技术等方面的不断发展,无线传感器网络得以广泛应用。
三、无线传感器网络技术的优势1. 低成本。
由于采用的是小型化单元,无线传感器网络的成本相对较低。
2. 自组织。
无线传感器网络具有自组织和自修复的能力,在网络节点出现故障时可自动调整网络拓扑结构,保证了网络的稳定性和可靠性。
3. 简便易用。
无线传感器网络具有较好的用户接口性,方便用户使用。
4. 数据处理能力。
无线传感器网络具有较强的数据处理能力,可以对节点传来的大量数据进行处理和分析。
四、无线传感器网络技术的应用领域1. 环境监测。
无线传感器网络技术可以实现对大气、水质、土壤等环境指标的自动监测,提高环境监测效率。
2. 工程安全监测。
无线传感器网络技术可以实现对建筑物、桥梁、公路等工程的安全监测,提高工程安全性。
3. 农业生产。
无线传感器网络技术可以自动监测农作物的生长情况,帮助农民根据监测数据实施合理的农业生产措施。
4. 物流和仓储管理。
无线传感器网络技术可以实现对物流和仓储环节的全面监测,提高物流和仓储管理水平。

无线传感器网络无线传感器网络(Wireless Sensor Networks, WSN)是一种由众多装备了传感器和通信设备的节点组成的、可以进行数据采集、处理和传输的网络系统。
这些节点可以相互通信,共同完成特定的监测、控制或者数据传输任务。
无线传感器网络广泛应用于环境监测、医疗健康、物联网等领域。
一、无线传感器网络的组成无线传感器网络由多个节点组成,每个节点都有独立的处理能力、通信能力和传感能力。
节点之间通过无线通信进行数据的传递和交换。
每个节点可以采集周围环境的信息,并将数据传输给其他节点,或者通过无线信号传输给数据收集中心。
在无线传感器网络中,节点可以分为三个类型:传感器节点、中心节点和路由节点。
传感器节点用于收集环境信息,如温度、湿度、光照等。
中心节点负责数据的存储和处理,是整个网络的核心。
路由节点用于传输数据,将各个传感器节点采集到的数据传输给中心节点。
二、无线传感器网络的应用无线传感器网络在各个领域都有广泛的应用。
1. 环境监测无线传感器网络可以用于环境的监测和数据的采集。
通过部署传感器节点,可以实时监测空气质量、水质状况、土壤湿度等环境因素,并将数据传输给监测站点。
这对于环境保护和资源管理非常重要。
2. 健康医疗无线传感器网络可以应用于健康监测和医疗领域。
通过佩戴传感器设备,可以实时监测人体的生理参数,如心率、血压、体温等,并将数据传输给医生或者云平台,以便于监护和诊断。
3. 物联网无线传感器网络是物联网的基础技术之一。
通过无线传感器网络,不同的物体和设备可以相互连接和通信,实现信息的交换和共享。
无线传感器网络在智能家居、智能城市等方面有着重要的应用。
三、无线传感器网络的挑战与未来发展尽管无线传感器网络在各个领域都有广泛的应用,但也面临一些挑战。
1. 能源管理由于无线传感器网络中的节点通常是由电池供电,能源管理是一个重要的问题。
如何延长节点的寿命,提高能源利用效率是当前的研究重点之一。

无线传感网络无线传感器网络(Wireless Sensor Networks, WSN)是一种分布式传感网络。
是由部署在监测区域内大量的廉价微型传感器节点组成,通过无线通信方式形成的一个多跳的自组织的网络系统。
WSN中的传感器节点通过无线方式通信,网络设置灵活,设备位置可以随时更改,还可以跟互联网进行有线或无线方式的连接。
且在科技水平大幅度提高的基础上传感器节点的成本和能耗也逐渐降低,使得WSN在很多领域得到应用。
最早现代意义上的传感器是1879年德国科学家霍尔在研究金属的导电机制时制作的磁场传感器。
经过100多年的发展,传感器的功能不再单一,可以采集温度、湿度、位置、光强、压力、生化等标量数据。
1996年,美国军方资助加州大学洛杉矶分校(UCLA)等单位开展低功耗无线传感器网络(Low-power Wireless Integrated Microsensors,LWIM)的研究。
LWIM III型无线传感器节点将传感器、控制电路与电源电路集成为一体。
两年之后,UCLA与Rockwell合作,开发了Rockwell WINS(Wireless Integrated Network Sensor)无线传感器节点。
该节点使用32位微处理器Strong ARM、1MB的内存与4MB的闪存,数据传输速率是100kbps,工作时的功耗为200mw,睡眠时的功耗是0.8mw。
与此同时,加州大学伯克利分校(UCB)也开展了“Smart Dust”(智能尘埃)项目的研究。
“智能尘埃”意指传感器节点的体积非常小,如尘埃一般。
该项目研究的目标是通过MEMS技术,实现传感、计算与通信能力的集成,用智能传感器技术增强微型机器人的环境感知与智慧处理能力。
其研究任务是开发一系列低功耗、自组织、可重构的无线传感器节点。
1998年研制的WeC智能传感器节点使用的是8位、主频为4MHz的AT90LS8535微处理器芯片,内存是512B,闪存为8kB,数据传输速率为10kbps,工作时的功耗为15mw,睡眠时的功耗是45μw。

大学无线传感器网络教案一、教学目标通过本课程,学生将了解到无线传感器网络(Wireless Sensor Networks,WSN)的原理、网络结构、应用场景以及其在物联网中的重要性,同时掌握WSN的网络拓扑结构设计方法和WSN中的包括传输协议、路由协议、网络安全等相关技术。
二、教学内容1. 无线传感器网络概述1.1 什么是无线传感器网络1.2 无线传感器网络的优缺点1.3 无线传感器网络的应用场景2. 无线传感器网络结构2.1 网络拓扑结构设计2.2 网络节点分类2.3 无线传感器节点的构成2.4 无线传感器网络的通信协议3. 无线传感器网络技术3.1 传输协议3.2 路由协议3.3 网络安全三、教学方法本课程采用讲授结合实验的教学方法,通过讲解概念与原理,引导学生进行实验操作,提高学生的自主探究能力。
四、教学过程1. 无线传感器网络概述1.1 无线传感器网络的定义无线传感器网络是一种由分布在空间中的大量微小的传感器节点组成的无线网络,通过传感器节点进行数据采集、处理、传输和网络通信等功能,实现对监测环境的实时感知、辅助决策等目的。
1.2 无线传感器网络的优缺点优点:1)节点数量可灵活扩展;2)维护成本低廉;3)无线通信便利;4)实时感知能力强;5)他适老面多种应用场景。
缺点:1)网络安全容易受到攻击;2)传输距离有限制;3)数据通信存储的能力有限。
1.3 无线传感器网络的应用场景无线传感器网络可用于环境监测、智能交通、智能家居、工业监测等多个领域,随着物联网的发展和普及,其应用场景将不断拓展。
2. 无线传感器网络结构2.1 网络拓扑结构设计无线传感器网络节点之间的拓扑结构分为两种:平面型结构和三维结构。
平面型结构具有灵活性,安装与维护较为方便;三维结构则能够应对更高水平的感知任务。
但这两种结构都需要合理设计。
2.2 网络节点分类无线传感器网络中的节点可以按照不同维度进行分类:硬件节点、软件节点、通信节点等。
无线传感器网络中的移动目标跟踪与感知研究无线传感器网络(Wireless Sensor Networks,简称WSNs)是由大量部署在一个空间范围内的低成本、低功耗、小型化的无线传感器节点组成。
这些节点能够感知环境中的各种物理和化学信号,并将这些信息通过网络进行传输和处理,从而实现对环境的实时监测与感知。
在WSNs中,移动目标跟踪与感知一直是一个重要而具有挑战性的研究方向,本文将从不同角度探讨这一问题。
一、无线传感器网络中的移动目标跟踪技术发展随着科技的进步和无线通信技术的发展,无线传感器网络的应用范围不断扩大,涵盖了军事、环境监测、智能交通等众多领域。
然而,在实际应用中,如何准确、高效地跟踪移动目标始终是一个具有挑战性的问题。
1.1 传感器节点选择与部署在无线传感器网络中,传感器节点的选择与部署对于目标跟踪和感知具有重要影响。
传感器节点的选择要能够满足目标检测、定位和追踪的需求,考虑到成本、能量消耗和网络容量等因素。
同时,传感器节点的部署位置也需要经过合理规划,以保证网络的覆盖范围和信号质量。
1.2 目标检测与定位算法目标检测与定位是实现移动目标跟踪的基础,只有准确地检测和定位目标,才能保证后续的跟踪任务的准确性。
常见的目标检测与定位算法包括基于信号强度、时间差测量(Time of Arrival,TOA)和测量的角度等。
这些算法能够通过多节点协同工作,提高目标的定位精度和稳定性。
1.3 目标跟踪算法目标跟踪算法是实现移动目标感知和跟踪的核心技术。
常见的目标跟踪算法包括基于卡尔曼滤波器(Kalman Filter)和粒子滤波器(Particle Filter)的方法。
这些算法能够结合传感器节点的观测值和先验信息,对目标的位置和运动轨迹进行估计和预测。
二、无线传感器网络中的移动目标感知研究移动目标感知不仅包括目标的跟踪,还包括对目标属性和行为的分析。
在无线传感器网络中,如何有效地感知移动目标的属性和行为是一个重要而具有挑战性的问题。
本栏目责任编辑:冯蕾无线传感器网络攻击与防范刘勇,侯荣旭(沈阳工程学院计算中心,辽宁沈阳110136)摘要:无线传感器网络安全机制的研究一直是传感器网络的研究热点,该文主要介绍了无线传感器网络各层的攻击方式以及各个攻击方式的防范措施。
关键词:无线传感器网络;安全;攻击;防范中图分类号:TP393文献标识码:A 文章编号:1009-3044(2013)35-7927-02Wireless Sensor Network Attack and PreventionLIU Yong,HOU Rong-xu(Computer Center,Shenyang Institute of Engineering,Shenyang 110136,China)Abstract:The security mechanism research of wireless sensor network has been a hot research topic of sensor networks,this pa⁃per mainly introduces the wireless sensor network attack means of each layer and the preventive measures against various attacks.Key words:Wireless Sensor Networks;security;attack;prevention无线传感器网络(wireless sensor networks)是结合传感器技术、计算和通信的产物,并作为一种全新的信息获取和处理技术在国际上备受关注。
由于现代科学的通讯技术和微型制造技术的不断提高,致使传感器不但具有感应外界环境的能力,而且还有独立处理信息和无线通讯的能力,外观上也变得越来越小。
无线传感器网络属于自组织多跳式的网络,它可以在一定范围内自行组建网络,一个终端节点可以通过多条路径把信息传送到另一个节点。
无线传感器网络在环境监测与控制中的应用研究第一章:引言无线传感器网络(Wireless Sensor Networks,WSN)是一种由大量分布式无线传感器节点组成的自组织网络,具有广泛的应用领域。
在环境监测与控制中,无线传感器网络具有很高的实用价值和应用前景。
本文将深入探讨无线传感器网络在环境监测与控制领域的应用研究。
第二章:无线传感器网络概述2.1 无线传感器网络的基本概念2.2 无线传感器节点的组成和功能2.3 无线传感器网络的组网方式和通信协议第三章:环境监测与控制的需求和挑战3.1 环境监测与控制的背景和重要性3.2 环境监测与控制的技术需求和挑战3.3 无线传感器网络在环境监测与控制中的优势第四章:无线传感器网络在环境监测中的应用4.1 大气环境监测4.1.2 气象监测4.1.3 气候变化监测4.2 水环境监测4.2.1 水质监测4.2.2 水量监测4.2.3 水资源管理4.3 土壤环境监测4.3.1 土壤污染监测4.3.2 农田监测与管理4.3.3 林业资源管理4.4 生态环境监测4.4.1 生物多样性监测4.4.2 自然保护区监测4.4.3 灾害监测与预警第五章:无线传感器网络在环境控制中的应用5.1 智能能源管理5.1.2 能源利用优化5.1.3 能源系统调度5.2 智能交通控制5.2.1 交通流量监测5.2.2 路况监测与优化5.2.3 交通信号控制5.3 环境污染治理5.3.1 垃圾处理与回收5.3.2 污水处理与监测5.3.3 声、光、电污染控制第六章:无线传感器网络在环境监测与控制中的关键技术6.1 传感器节点设计与优化6.2 网络拓扑设计与构建6.3 节点定位与跟踪技术6.4 信号处理与数据融合算法6.5 安全与隐私保护技术第七章:研究现状与展望7.1 国内外研究现状回顾7.2 未来发展趋势与挑战7.3 技术创新与应用前景展望结论无线传感器网络在环境监测与控制中具有广泛的应用前景,能够实现对环境的全面监测和控制,为环境保护和资源管理提供了有效的技术手段。
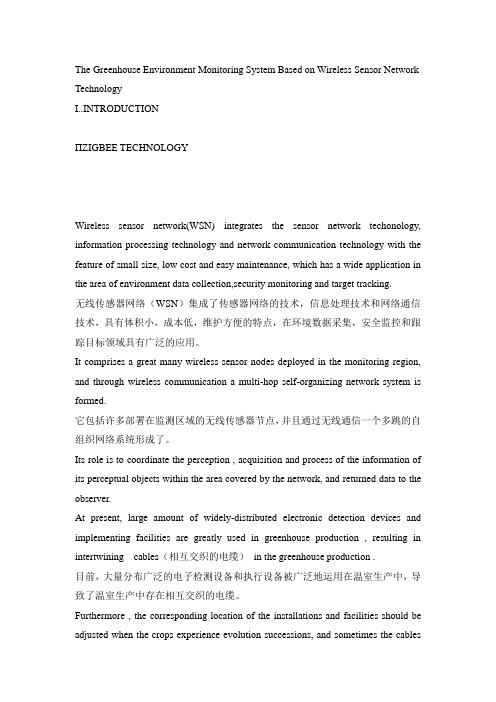
WIRELESS SENSOR NETWORKSFOR SECURITY:ISSUES AND CHALLENGESTolga Onel1,Ertan Onur1,Cem Ersoy1and Hakan Delic21Department of Computer Engineering2Department of Electrical and Electronics EngineeringBoˇg azi¸c i UniversityBebek34342Istanbul,TurkeyAbstract In this chapter,the sensing coverage area of surveillance wireless sensor networks is considered.The sensing coverage is determined by apply-ing Neyman-Pearson detection and defining the breach probability ona grid-modeledfiing a graph model for the perimeter,Dijkstra’sshortest path algorithm is used tofind the weakest breach path.Thebreach probability is linked to parameters such as the false alarm rate,size of the data record and the signal-to-noise ratio.Consequently,therequired number of sensor nodes and the surveillance performance of thenetwork are determined.For target tracking applications,small wire-less sensors provide accurate information since they can be deployedand operated near the phenomenon.These sensing devices have the op-portunity of collaboration amongst themselves to improve the target lo-calization and tracking accuracies.Distributed data fusion architectureprovides a collaborative tracking framework.Due to the present energyconstraints of these small sensing and wireless communicating devices,acommon trend is to put some of them into a dormant state.We adopt amutual information based metric to select the most informative subsetof the sensors to achieve reduction in the energy consumption,whilepreserving the desired accuracies of the target position estimation.1.IntroductionWireless sensor devices that are employed for security applications have several functionalities.Thefirst one is the distributed detection of the presence of a target,and the estimation of parameters of interest. The target may be tracked for various purposes.The detection,estima-tion and tracking efforts may or may not be collaborative.The second2task involves wireless networking to organize and carry information.Is-sues related to distributed detection and estimation have long been stud-ied.Moreover,wireless sensor networking is addressed in the literature to a certain extent in the context of ad hoc networking.However,there is not much work done on how the wireless networking constraints af-fect the distributed detection and estimation duty of the wireless smart sensor networking devices.The sensing and communication ranges of some propriety devices are listed in[44].For example,the sensing range of the Berkeley motes acoustic sensor,HMC1002magnometer sensor and the thrubeam type photoelectric sensor are nearly one meter,5meters and10meters re-spectively.The communication range of the Berkeley motes MPR300, MPR400CB and MPR520A are30,150and300meters,respectively. The ratio of the communication and sensing ranges shows that the net-work must be densely deployed.The high redundancy level of the net-work necessitates energy conservation schemes.For surveillance wireless sensor networks(SWSN),depending on the sensing ranges and the coverage schemes of the sensors,as well as the de-ployment density of the network,the sensing coverage area may contain breach paths.The probability that a target traverses the region through the breach path gives insight about the level of security provided by the SWSN.Considering SWSN,some of the design challenges are: 1How many sensor are to be deployed to provide a required security level[31]?2How could the sensor detection be modeled and how is the sensing coverage determined?3What are the effects of geographic properties of thefield on target detection?4How should the sensors be deployed in the region[38]?5What is the weakest part of the coverage and how can the breach paths be discovered[11,46]?6How could the false alarms be minimized and the decisions be improved about target detection with collaboration?7What are the effects of the signal properties on the sensing cover-age?8What is the impact of sensor scheduling on the sensing coverage [36,40,43]?Wireless Sensor Networks for Security:Issues and Challenges3Figure1.A samplefield model constructed tofind the breach path for length is5 m.,width2m.,boundary1m.,and grid size1m.(N=8,M=3).9Non-communicating sensors are useless;what should the effective communication and sensing ranges of the sensors be[8,40]?10Should incremental deployment be considered[19]?Intrusion DetectionThe security level of a WSN can be described with the breach probabil-ity that can be defined as the miss probability of an unauthorized target passing through thefield.We define the weakest breach path problem as finding the breach probability of the weakest path in a SWSN.To calcu-late the breach probability,one needs to determine the sensing coverage of thefield in terms of the detection probabilities.In order to simplify the formulations,we model thefield as a cross-connected grid as in Fig.1Thefield model consists of the grid points, the starting point and the destination point.The target aims to breach through thefield from the starting point that represents the insecure side to the destination point that represents the secure side from the SWN viewpoint.The horizontal and vertical axes are divided into N−1and M−1equal parts,respectively.In this grid-basedfield model along the y-axis,we add boundary regions to the two sides of thefield.Thus,there are NM grid points plus the starting and destination points.Sensor deployment has a direct impact on the performance of tar-get detection.Chvatal’s art gallery problem[10]is to determine the minimum number of guards required to cover all points in a gallery.4The similarity between the art gallery and sensor placement problems is established in[12],where algorithms are proposed tofind effective loca-tions for the sensor nodes.One algorithm tries to maximize the average coverage of the grids and the other tries to maximize the coverage of the least effectively covered grid.The goal is to determine the required number of sensor nodes and their places to provide a coverage threshold that defines the confidence level of the deployment.Another approach to the breach path problem isfinding the path which is as far as possible from the sensor nodes as suggested in[27], where the maximum breach path and maximum support path problems are formulated.In the maximum breach path formulation the objective is tofind a path from the initial point to the destination point where the smallest distance from the set of sensor nodes is maximized.In the former problem,the longest distance between any point and the set of sensor nodes is minimized.To solve these problems,Kruskal’s algorithm is modified tofind the maximal spanning tree,and the definition of a breach number tree is introduced as a binary tree whose leaves are the vertices of the Voronoi graph.The weakest breach path is also referred to as the best coverage prob-lem in[24].The energy considerations are modeled,a graph is created and the distributed Bellman-Ford algorithm is used tofind the shortest path.Several extensions to the solutions are provided such asfinding the best path with the minimum energy consumption andfinding the path where the length is bounded.In[26],Megerian et al.introduce the exposure concept as the ability to observe a target moving in a sensorfield.By expressing the sensibility of a sensor in a generic form,thefield intensity is defined as the sum of the active sensor sensibilities.The exposure is then defined as the integral of the intensities(involving all sensors or just the closest one) on the points in a path in the sensorfield.Thefield to be monitored is usually narrow and long in perimeter security applications.Thus,non-uniform deployment may be necessary. He et al.conclude that the sensor nodes generate false alarms at a non-negligible rate[18],and an exponentially weighted moving average on the sensor node is sufficient to eliminate transient alarms.Due to the scarcity of energy resources of sensor nodes,energy con-servation at all layers of the sensor network models is a widely studied topic.One method of energy conservation is applying a well-designed sleep schedule of sensor nodes[36,40,43].However,for surveillance ap-plications sleep scheduling of sensor nodes may produce insecure regions in thefield.Thus,the primary concern in designing a sleep schedul-ing for surveillance wireless sensor networks is maintaining the coverageWireless Sensor Networks for Security:Issues and Challenges5 area.In[40],a coverage configuration protocol is presented that provides varying degrees of coverage depending on the application.Defining the coverage as the monitoring quality of a region,an analysis of the sens-ing coverage and communication connectivity is provided in a unified framework rather than an isolated one.Target TrackingTarget tracking,in other words the processing of the measurements obtained from a target in order to maintain an estimate of its current state,has major importance in Command,Control,Communications, Computer,Intelligence,Surveillance and Reconnaissance(C4ISR)ap-plications.Emerging wireless sensor technologies facilitate the tracking of targets just from within the phenomenon.Due to environmental per-turbations,observations obtained close to the phenomenon are more reliable than observations obtained far from it.Wireless communication characteristics of the emerging wireless sensor nodes provide an excellent distributed coordination mechanism to improve global target localization accuracies.However,again,there is an inherent energy constraint for wireless sensor devices.In order to conserve valuable battery energy of wireless sensor devices,some of the sensors go into the dormant state controlled by the sleep schedule[42].Only a subset of the sensors are active at any instant of time.Otherwise,a bulk of redundant data would be wandering in the network.Collaborative target tracking has inherent questions such as how to dynamically determine who should sense,what needs to be sensed,and whom the information must be passed on to.Sensor collaboration im-proves detection quality,track quality,scalability,survivability,and re-source usage[45].There is a trade-offbetween energy expenditure and tracking quality in sensor networks[32].Sensor activation strategies are naive activation in which all the sensors are active,randomized activation in which a random subset of the sensors are active,selective activation in which a subset of the sensors are chosen according to some performance metric, and duty cycled activation in which the sensors are active for some duty cycle and in dormant state thereafter.In information driven sensor querying(IDSQ)[9,45],the so-called cluster heads decide on the sensors to participate actively in the tracking task.In[25],a dual-space approach is presented in which the subset of sensors towards whom the target is approaching are selected to be active. In the location-centric approach to collaborative sensing and tracking, addressing and communication is performed among geographic regions6within the network rather than individual nodes[35,5].This makes lo-calized selective-activation strategies simpler to implement.Prediction based target tracking techniques based on Pheromones,Bayesian,and Extended Kalman Filter are presented in[6,7],and a real implemen-tation presented in[28].Multiple target tracking is examined in[4,15, 23].Censoring sensors[1,17,33,34]is one approach to diminish the net-work traffic load.Sensors deemed as noninformative do not send their decisions or observations if their local likelihood ratio falls in a certain single interval.A special case of this phenomenon occurs when the lower bound of the no-send region interval used is zero.In this particular case, the problem reduces to sending the local decision/observation if the lo-cal likelihood ratio is above some threshold and not sending the local decision/observation if the local likelihood ratio falls below a threshold.A deficiency with this approach occurs for tracking applications if all the sensor local likelihood ratios fall in the no-send region,so that no belief about the target state will be shared among the sensors.Research[37,43]has focused on how to provide full or partial sensing coverage in the context of energy conservation.In such an approach, nodes are put into a dormant state as long as their neighbors can provide sensing coverage for them.These solutions regard the sensing coverage to a certain geographic area as binary,i.e.,either it provides coverage or not[42].These approaches consider the sensor selection problem only in terms of coverage and energy saving aspects.They do not consider the detection quality.In tracking applications,when selecting a subset of sensors to contribute to the global decision we have to consider how informative the sensors are about the state of the target.In some approaches to the sensor selection problem[9,14],the sensor which will result in the smallest expected posterior uncertainty of the target state is chosen as the next node to contribute to the decision. It is shown in[14]that minimizing the expected posterior uncertainty is equivalent to maximizing the mutual information between the sensor output and the target state.In[39],an entropy-based sensor selection heuristic is proposed for target localization.The heuristic in[39]selects one sensor in each step and the observation of the selected sensor is incor-porated into the target location distribution using sequential Bayesian filtering.2.Neyman-Pearson DetectionUsing thefield model described above,detection probabilities are to be computed for each grid point tofind the breach probability.TheWireless Sensor Networks for Security:Issues and Challenges7 optimal decision rule that maximizes the detection probability subject to a maximum allowable false alarm rateαis given by the Neyman-Pearson formulation[21].Two hypotheses that represent the presence and absence of a target are set up.The Neyman-Pearson(NP)detector computes the likelihood ratio of the respective probability density func-tions,and compares it against a threshold which is designed such that a specified false alarm constraint is satisfied.Suppose that passive signal reception takes place in the presence of additive white Gaussian noise(AWGN)with zero mean and varianceσ2n, as well as path-loss with propagation exponentη.The symbol power at the target isψ,and the signal-to-noise power ratio(SNR)is defined as γ=ψ/σ2n.Each breach decision is based on the processing of L data samples.We assume that the data are collected fast enough so that the Euclidean distance d vi between the grid point v and sensor node i remains about constant throughout the observation epoch.Then,given a false alarm rateα,the detection probability of a target at grid point v by sensor i is[21,31]p vi=1−Φ Φ−1(1−α)−8For those sensor types where the detection probability can not be ex-plicitly tied to signal,noise and propagation parameters (e.g.infrared),the sensing model proposed by Elfes can be used [13].The detection probability is defined such that different sensor types are represented by generic parameters.When the sensor-to-target distance is smaller (larger)than a threshold,the target is absolutely (not)detected.Elfes’s model is employed in [30],where the required number of sensors is deter-mined for a target breach probability level under random sensor place-ment.The detection probability p v at any grid point v is defined asp v =1−R i =1(1−p ∗vi )(1)where R is the number of sensor nodes deployed in the field.The miss probabilities of the starting and destination points are one,that is p 0=0and p NM +1=0.More clearly,these points are not monitored because they are not in the sensing coverage area.The boundary regions are not taken into consideration.The weakest breach path problem can now be defined as finding the permutation of a subset of grid points V =[v 0,v 1,...,v k ]with which a target traverses from the starting point to the destination point with the least probability of being detected,where v 0=0is the starting point and v k =NM +1is the destination point.Here we can define the breach probability P of the weakest breach path V asP = v j ∈V(1−p v j )(2)where p v j is the detection probability associated with the grid point v j ∈V ,defined as in (1).A sample sensing coverage and breach path is shown in ing the two-dimensional field model and adding the detection probability as the third axis,we obtain hills and valleys of detection probabilities.The weakest breach path problem can be infor-mally defined as finding the path which follows the valleys and through which the target does not have to climb hills so much.For a number of quality of deployment measures that can be utilized to evaluate a sensor network’s intrusion detection capability,see [29].In order to solve the weakest breach path problem,linear program-ming algorithms such as simplex can be utilized [3].However,since we construct a graph to model the field,Dijkstra’s shortest path algorithm can be employed [41].The detection probabilities associated with the grid points cannot be directly used as weights of the grid points,andWireless Sensor Networks for Security:Issues and Challenges9Figure2.A sample sensing coverage and breach path where thefield is70×20m., the boundary is5m.wide and the grid size is1m.(N=81,M=21,L=100,R= 30,α=0.1,η=5,γ=30dB.)[31].consequently they must be transformed to a new measure d v.Specifi-cally,we assign the negative logarithms of the miss probabilities,defined asd v=−log(1−p v)as weights of the grid points.Using Dijkstra’s algorithm,the breach probability can be defined as the inverse transformation of the weight d NM+1of the destination point which isP=10−d NM+1.(3) The resulting path V is used to calculate the breach probability in(2), which is equal to the value computed in(3)[30].3.Breach Probability Analysis[31]The system parameter values depend on the particular application. When a house or a factory is to be monitored for intrusion detection, the cost of false alarms is relatively low.On the other hand,thefi-nancial and personnel cost of a false alarm is significantly higher when the perimeter security of some mission-critical place such as an embassy or nuclear reactor is to be provided by deploying a SWSN to moni-tor unauthorized access.The cost of a false alarm might involve the transportation of special forces and/or personnel of related government agencies to the embassy/museum,as well as the evacuation of residents in the surrounding area.In simulations,an area with dimensions100m.×10m.is secured by a WSN.The grid size is taken as one meter so that the detection probabilities of targets on adjacent grid points are independent.The boundary width is10m.The false alarm rate is set to0.01,which is rather demanding on the network.Other nominal values areη=3,L=10100,γ=30dB,p t=0.9and R=31.The results are the averages of50 runs.Figure3.The effect ofαon the breach probability.Figure4.The effect ofγon the breach probability.The breach probability P is quite sensitive to the false alarm rate α.As shown in Fig.3b,asαincreases,the SWSN allows more false alarms.Becauseαreflects the tolerance level to false alarm errors,the NP detection probability and the detection probability p v of the targets at grid point v both increase inα.Consequently,the breach probability decreases.As the signal-to-noise ratioγincreases,the detection performance improves(see Fig.4),and the breach probability decreases.Depending on the path-loss exponent,γ=10dB yields minimal breach probability.Wireless Sensor Networks for Security:Issues and Challenges11Figure5.The effect of the number of sensor nodes on the breach probability for y v∼Uniform(0,M−1).Figure6.The effect of the number of sensor nodes on the breach probability for y v∼Normal(M/2,N/10).Note thatηandγdisplay a duality in that if one isfixed,the performance breaks down when the other parameter is below or above some value. While analyzing the required number of sensor nodes for a given breach probability,we consider two cases of random deployment.In the first case,we assume that the sensor nodes are uniformly distributed along both the vertical and horizontal axes.In the second case,the sen-sor nodes are deployed uniformly along the horizontal axis and normally distributed along the vertical axis with mean M/2and a standard devia-tion of10%of the width of thefield.In the simulations,the sensor nodes that are deployed outside thefield are not included in the computations of the detection probabilities.12Considering the uniformly distributed y-axis scheme,the required number of sensor nodes for a given breach probability is plotted in Fig.5.A breach probability of0.01can be achieved by utilizing45sensors. Changing the false alarm rate toα=0.1,the requirement becomes30 sensor nodes.The rapid decrease in the breach probability at R=16 in Fig.5a can be justified by the fact that most of the grid points are covered with high detection probabilities(saturated)for R=15,and adding one more sensor node decreases the breach probability drasti-cally.Once saturation is reached,placing more sensors in thefield has marginal effect.Analyzing Fig.6,the above-mentioned saturation is seen more clearly for the normal-distributed y-axis scheme.For this kind of deployment, since the sensor node may fall outside thefield,the breach probability decreases slower compared to the uniformly distributed y-axis scheme.4.Data Processing Architecture for TargetTrackingIn this section,wefirst define the process and observation models for target tracking.Then the foundations of the distributed data fusion architecture are presented.Process ModelThe target process is a four dimensional vector that consists of the two dimensional position of the target,(ξ,η),and the velocity of the target, (˙ξ,˙η),at each of these dimensions.The target process state vector is defined byx=[ξη˙ξ˙η]T,(4) and it evolves in time according tox(k+1)=Fx(k)+v(k)where x(k)is the real target state vector at time k as given in(4),F is the process transition matrix,and v is the process transition noise. Observation ModelSensors can only observe thefirst two dimensions of the process.The velocity of the target is not observable by the sensors.Furthermore, sensors collect range and bearing data,but they cannot observe the co-ordinates of the target directly.Because sensors observe the target state in polar coordinates,linearfiltering formulations do not help.There are two implementation alternatives to remedy this problem:(1)by usingWireless Sensor Networks for Security:Issues and Challenges13 the inverse transformation,obtain directly a converted measurement of the target position;(2)leave the measurement in its original form.The former yields a purely linear problem,allowing for linearfiltering.The latter leads to a mixed coordinatefilter[2].In[22],the mean and co-variance of the errors of Cartesian measurements,which are obtained by converting polar measurements,are derived.This conversion provides better estimation accuracy than the Extended Kalman Filter(EKF), in which the nonlinear target state measurements are utilized without conversion[22].The measured range and bearing are defined with respect to the true range r and bearingθasr m=r+˜rθm=θ+˜θwhere the errors in range˜r and bearing˜θare assumed to be independent with zero mean and standard deviationsσr andσθ,respectively.The target mean state observed after the unbiased polar-to-Cartesian conversion is given byϕc= ξc mηc m = r m cosθmr m sinθm −µwhereµis the average true bias:.µ= r m cosθm(e−σ2θ−e−σ2θ/2)r m sinθm(e−σ2θ−e−σ2θ/2)The covariances of the observation errors are[2,22]R11=r2m e−2σ2θ cos2θm(cosh2σ2θ−coshσ2θ)+sin2θm(sinh2σ2θ−sinhσ2θ)+σ2r e−2σ2θ cos2θm(2cosh2σ2θ−coshσ2θ)+sin2θm(2sinh2σ2θ−sinhσ2θ) ,R22=r2m e−2σ2θ sin2θm(cosh2σ2θ−coshσ2θ)+cos2θm(sinh2σ2θ−sinhσ2θ)+σ2r e−2σ2θ sin2θm(2cosh2σ2θ−coshσ2θ)+cos2θm(2sinh2σ2θ−sinhσ2θ)R12=sinθm cosθm e−4σ2θ σ2r+(r2m+σ2r)(1−eσ2θ) .14Distributed Data Fusion ArchitectureInformation state y and the information matrix Y associated with an observation estimateˆx,and the covariance of the observation estimate P at time instant k are given by[16]ˆy(k)=P−1(k)ˆx(k),Y(k)=P−1(k).In[16],it is also shown that by means of sufficient statistics,an ob-servationϕcontributes i(k)to the information state y and I(k)to the information matrix Y wherei(k)=H T R−1(k)ϕ(k),(5)I(k)=H T R−1(k)Hand H is the observation matrix of the sensor.Instead of sharing the measurements related to the target state among the collaborating sensors,sharing the information form of the observa-tions results in a simple additive fusion framework that can be run on each of the tiny sensing devices.The distributed data fusion equations areˆy(k|k)=ˆy(k|k−1)+Ni=1i i(k),(6)Y(k|k)=Y(k|k−1)+Ni=1I i(k)(7)where N is the total number of sensors participating in the fusion process andˆy(k|k−1)represents the information state estimate at time k given the observations including time k−1.Just before the data at time k are collected,if we were given the observations up to the time k−1,the predicted information state and the information matrix at time k could be calculated from ˆy(k|k−1)=Y(k|k−1)FY−1(k−1|k−1)ˆy(k−1|k−1),Y(k|k−1)=[FY−1(k−1|k−1)F T+Q]−1where Q is the state transition covariance.State estimate of the target at any time k can be found fromˆx(k|k)=Y−1(k|k)ˆy(k|k).(8)Wireless Sensor Networks for Security:Issues and Challenges15Figure7.Target tracking algorithm for a sensor.5.Maximum Mutual Information Based SensorSelection AlgorithmMutual information measures how much information one random vari-able tells about another one.In target localization and tracking appli-cations,the random variables of interest are the target state and the observation obtained about the target state.By measuring the mutual information between the target state and the measurement,one can gain insight as to how much the current observation tells about the current target state.The algorithm employed by a sensor for tracking targets in a collabo-rative manner within the distributed data fusion framework is depicted in Fig.7.The information state and the information matrix are defined by(5).The predicted information state and the information matrix are computed by(7).The sensor’s current belief is updated by its own16sensory observation according toˆy(k|k)=ˆy(k|k−1)+i(k),Y(k|k)=Y(k|k−1)+I(k).Active participation to the current cycle is decided based on the mu-tual information gained with the last observation.This event can be formulated asJ(k,ϕ(k))=1|Y(k|k−1)| .(9)If the mutual information gain J of the sensor is sufficiently high to par-ticipate in the current cycle,the sensor shares its own information about the target state with the neighboring nodes.Otherwise,the sensor does not transmit during the current cycle.In(9),Y(k|k−1)denotes the predicted information matrix at the time instant k,given the observation up to the time instant k−1.Thus,the sensor has an estimate about the target state information that it will have at time instant k,before the observation of the target state at time instant k.Y(k|k)is the informa-tion matrix at the time instant k after the target state is observed.The mutual information in(9)measures the improvement in the target state estimate achieved with the observation.To decide if the mutual informa-tion is adequately high to participate in the current cycle,a sensor needs to know the mutual information values of its neighboring sensors.This information is hard to predict ahead of time.To tackle this problem,we design each sensor to hold a list of its neighboring sensors.The elements of this list are the sensor characteristics like the standard deviation of the target range observations,standard deviation of the target angle observations,and the communication transmission power.Knowing the communication signal transmission power of the neighboring sensor,it is easy to estimate the relative position of the neighboring sensor.This position estimation is done in a sliding window average of the last eight communications received from the neighboring sensor.With the sensors’own observation about the target state,it is again easy to estimate the Y(k|k)value of the neighboring sensor.Y(k|k−1)is the estimation of the cooperated information matrix.Given this information,the mutual information J for the neighboring sensors is estimated.All the neighbor-ing sensors and the sensor itself are sorted according to the decreasing mutual information order.If the sensor detects the target,and the rank of its mutual information is lower than the maximum allowed number of sensors to communicate then the sensor broadcasts its information state and the information matrix denominations to the network.The current belief is updated with the received information from the sensors in the。