测深仪工作原理与安装
- 格式:ppt
- 大小:347.00 KB
- 文档页数:40
船用测深仪的安装和检修黄剑南通中远船务工程有限公司摘要:文中介绍了船用回声式测深仪的工作原理、安装要求,并针对测深仪的安装检修中碰到的问题,结合多年对测深仪的安装、维护、修理的经验,进行总结归纳,以便今后工作的查询。
关键词:测深仪;回声式;换能器;型号;安装注意事项;常见故障;水深模拟器;一、测深仪的概述1。
测深仪在航海上的作用测深仪(echo sounder )是测量超声波信号自反射经水底反射至接受的时间间隔,用以确定水深的一种仪器。
在航海上,测深仪的用途是:(1)船舶在情况不明的海域或狭窄水道航行时,测量水深以确保航行安全;(2) 在能见度不良或导航仪器失效时,用测量水深来辨认航位;(3) 对海域的水深进行精密测量,提供确保船舶安全航行的水深资料.(4)现代化多功能的船用测深仪还可实现水下勘测、鱼群探测跟踪等功能600)makesmallpic(this,600,1800);' src="file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/ksohtml/wps_clip_image-9168。
png” width="302” height="283” /〉因此,测深仪是一种重要的航海仪器。
2。
回声测深仪原理回声测深仪是利用测量超声波自发射至被反射接收的时间间隔来确定水深的。
测量水深的原理如图6—1所示。
在船底装有发射超声波的发射换能器A和接收超声波的接收换能器B,A与B之间的距离为S,S称为基线。
发射换能器A以间歇方式向水下发射频率为20-200KHz的超声波脉冲,声波经海底发射后一部分能量被接收换能器B接收。
从图6-1知,只要测出声波自发射至接收所经历的时间,就可由下列公式求出水深:600)makesmallpic(this,600,1800);' src=”file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/ksohtml/wps_clip_image—19617.png" width=”346” height="47” /〉(6—1)式中:H为水面至海底的深度;D为船舶吃水;h为测量水深;S为基线长度;C为声波在海水中的传播速度,标准声速为1500m/s;t为声波自发射至接收所经历的时间。
目录第一章仪器功能及简介 (1)1.1依据标准 (1)1.2工作原理 (1)1.3仪器组成 (1)1.4注意事项 (2)1.5测量时应注意的问题 (2)1.6本手册约定 (2)第二章仪器操作说明 (3)2.1测试前的准备工作 (3)2.2菜单介绍与操作 (3)2.2.1主菜单 (3)2.2.2快速测深 (4)2.2.3标准测深 (5)2.2.4数据查看 (8)2.2.5数据清除 (10)2.2.6数据输出 (10)2.2.7系统设置 (11)第三章维护与保养 (13)3.1使用前检查 (13)3.2清洁 (13)3.3充电电池 (13)3.4换能器 (13)第四章数据处理软件 (14)4.1安装 (14)4.2软件界面 (16)4.3菜单功能说明 (17)4.4数据表操作 (17)4.5数据传输操作 (18)第一章仪器功能及简介1.1依据标准中国工程建设标准化协会标准《超声法检测混凝土缺陷技术规程》第5节“裂缝深度检测”。
1.2工作原理裂缝测深仪是根据声波绕射原理来测量混凝土裂缝深度。
测试原理如图1-1所示。
图1-1 缝深测试原理发射和接收换能器分别等距放在裂缝的两侧。
发射换能器发送信号后,接收换能器经过时间t后,接收到信号。
通过已知的间距L,速度v 和测量出来的时间t,来计算缝深h。
1.3仪器组成仪器组成包括主机、发射与接收换能器、换能器支架、信号线两根。
面板说明:1. :打开或关闭仪器;2. 选项:测试声速值;3. 存储:保存当前测试结果;4. ↑:光标上移或数字增大,以后用 上 代替;5. ←:光标左移,以后用 左 代替;6. →:光标右移,以后用 右 代替;7. ↓:光标下移或数字减小,以后用 下 代替;8. 返回:取消当前的操作,返回到上一界面;9. 确定:确认选择项目或测试结果确认。
1.4注意事项1. 避免进水。
2. 避免高温(>50℃)。
3. 避免靠近强磁场,如大型电磁铁、大型变压器等。

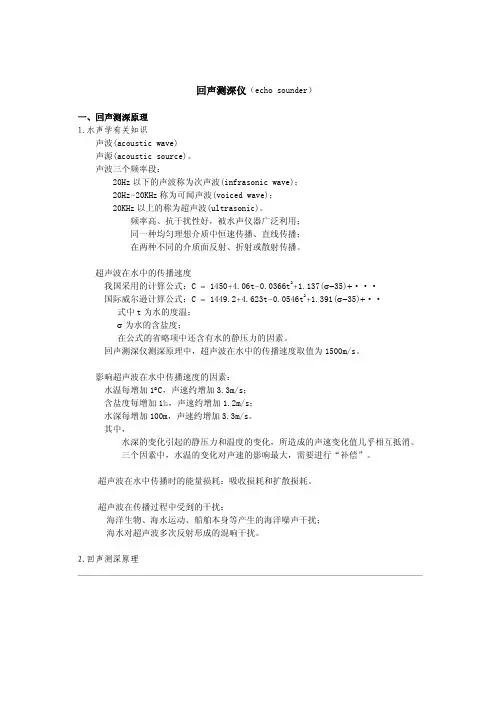
回声测深仪(echo sounder)一、回声测深原理1.水声学有关知识声波(acoustic wave)声源(acoustic source)。
声波三个频率段:20Hz以下的声波称为次声波(infrasonic wave);20Hz~20KHz称为可闻声波(voiced wave);20KHz以上的称为超声波(ultrasonic)。
频率高、抗干扰性好,被水声仪器广泛利用;同一种均匀理想介质中恒速传播、直线传播;在两种不同的介质面反射、折射或散射传播。
超声波在水中的传播速度我国采用的计算公式:C = 1450+4.06t-0.0366t2+1.137(σ−35)+···国际威尔逊计算公式:C = 1449.2+4.623t-0.0546t2+1.391(σ−35)+·· 式中t为水的度温;σ为水的含盐度;在公式的省略项中还含有水的静压力的因素。
回声测深仪测深原理中,超声波在水中的传播速度取值为1500m/s。
影响超声波在水中传播速度的因素:水温每增加1°C,声速约增加3.3m/s;含盐度每增加1‰,声速约增加1.2m/s;水深每增加100m,声速约增加3.3m/s。
其中,水深的变化引起的静压力和温度的变化,所造成的声速变化值几乎相互抵消。
三个因素中,水温的变化对声速的影响最大,需要进行“补偿”。
超声波在水中传播时的能量损耗:吸收损耗和扩散损耗。
超声波在传播过程中受到的干扰:海洋生物、海水运动、船舶本身等产生的海洋噪声干扰;海水对超声波多次反射形成的混响干扰。
2.回声测深原理 ———————————————————————————————————————————————————————————————————————————————————————— 2在船底安装发射超声波的换能器(transducer)A 和接收反射回波的换能器B回声测深仪的测深原理公式:水深:H = D + hh:船底到海底的垂直距离;D:船舶吃水。
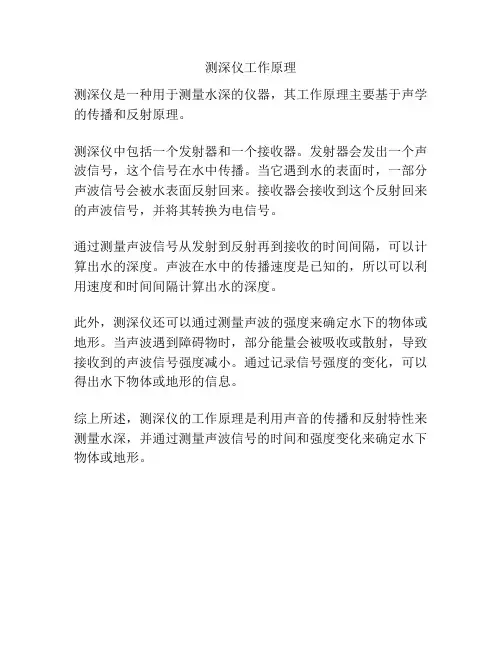
测深仪工作原理
测深仪是一种用于测量水深的仪器,其工作原理主要基于声学的传播和反射原理。
测深仪中包括一个发射器和一个接收器。
发射器会发出一个声波信号,这个信号在水中传播。
当它遇到水的表面时,一部分声波信号会被水表面反射回来。
接收器会接收到这个反射回来的声波信号,并将其转换为电信号。
通过测量声波信号从发射到反射再到接收的时间间隔,可以计算出水的深度。
声波在水中的传播速度是已知的,所以可以利用速度和时间间隔计算出水的深度。
此外,测深仪还可以通过测量声波的强度来确定水下的物体或地形。
当声波遇到障碍物时,部分能量会被吸收或散射,导致接收到的声波信号强度减小。
通过记录信号强度的变化,可以得出水下物体或地形的信息。
综上所述,测深仪的工作原理是利用声音的传播和反射特性来测量水深,并通过测量声波信号的时间和强度变化来确定水下物体或地形。
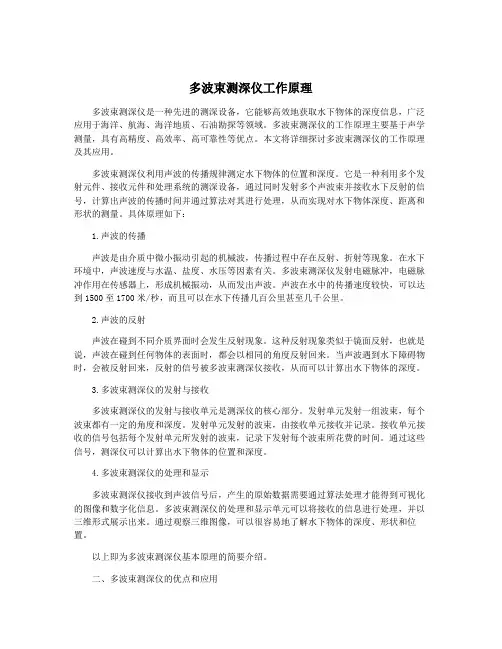
多波束测深仪工作原理多波束测深仪是一种先进的测深设备,它能够高效地获取水下物体的深度信息,广泛应用于海洋、航海、海洋地质、石油勘探等领域。
多波束测深仪的工作原理主要基于声学测量,具有高精度、高效率、高可靠性等优点。
本文将详细探讨多波束测深仪的工作原理及其应用。
多波束测深仪利用声波的传播规律测定水下物体的位置和深度。
它是一种利用多个发射元件、接收元件和处理系统的测深设备,通过同时发射多个声波束并接收水下反射的信号,计算出声波的传播时间并通过算法对其进行处理,从而实现对水下物体深度、距离和形状的测量。
具体原理如下:1.声波的传播声波是由介质中微小振动引起的机械波,传播过程中存在反射、折射等现象。
在水下环境中,声波速度与水温、盐度、水压等因素有关。
多波束测深仪发射电磁脉冲,电磁脉冲作用在传感器上,形成机械振动,从而发出声波。
声波在水中的传播速度较快,可以达到1500至1700米/秒,而且可以在水下传播几百公里甚至几千公里。
2.声波的反射声波在碰到不同介质界面时会发生反射现象。
这种反射现象类似于镜面反射,也就是说,声波在碰到任何物体的表面时,都会以相同的角度反射回来。
当声波遇到水下障碍物时,会被反射回来,反射的信号被多波束测深仪接收,从而可以计算出水下物体的深度。
3.多波束测深仪的发射与接收多波束测深仪的发射与接收单元是测深仪的核心部分。
发射单元发射一组波束,每个波束都有一定的角度和深度。
发射单元发射的波束,由接收单元接收并记录。
接收单元接收的信号包括每个发射单元所发射的波束,记录下发射每个波束所花费的时间。
通过这些信号,测深仪可以计算出水下物体的位置和深度。
4.多波束测深仪的处理和显示多波束测深仪接收到声波信号后,产生的原始数据需要通过算法处理才能得到可视化的图像和数字化信息。
多波束测深仪的处理和显示单元可以将接收的信息进行处理,并以三维形式展示出来。
通过观察三维图像,可以很容易地了解水下物体的深度、形状和位置。
多波束测深仪工作原理多波束测深仪,简称MBES,是一种用于测量水深和海底地形的高精度测量设备。
它采用多个声波束向不同方向发射声波,通过对声波的反射和回波的计算,可以精确地确定海底地形和水深,具有测量速度快、精度高、覆盖面积广等优点。
本文将介绍多波束测深仪的工作原理及其应用。
一、多波束测深仪的工作原理多波束测深仪主要由发射器、接收器、信号处理器和计算机等组成。
其工作原理是利用声波在水中传播时的特性,通过测量声波的传播时间和强度来确定水深和海底地形。
在测量过程中,多波束测深仪会向水下发射多个声波束,每个声波束与水平面成一定角度。
当声波束遇到水下物体时,会发生反射和回波。
接收器会接收到这些回波,并将其转化为电信号发送给信号处理器。
信号处理器会对接收到的信号进行处理,包括振幅、相位、频率等方面的分析,以确定信号的源头和反射物的位置。
然后,根据声波传播的速度和接收到的回波的时间差,计算出水深和海底地形的高度。
二、多波束测深仪的应用多波束测深仪具有高精度、高效率、广覆盖面积等优点,因此在海洋勘测、海底地形测量、水文学研究等领域得到了广泛的应用。
1、海洋勘测多波束测深仪可以用于测量海洋深度和海底地形,为海洋勘测提供高精度的数据。
在海洋勘测中,多波束测深仪常用于确定海岸线、测量海底地形、勘测海洋资源等。
2、海底地形测量多波束测深仪可以测量海底地形的高度和形状,为海底地形的研究和开发提供数据支持。
在海底地形测量中,多波束测深仪可用于确定海底地形的高度、形状、地貌等,为海底地形的研究和开发提供数据支持。
3、水文学研究多波束测深仪可以用于水文学研究,包括水文测量、水文模拟等方面。
在水文学研究中,多波束测深仪可用于测量河流、湖泊等水域的深度和形状,为水文学研究提供数据支持。
三、总结多波束测深仪是一种高精度、高效率的测量设备,具有广泛的应用领域。
其工作原理是利用声波在水中传播时的特性,通过测量声波的传播时间和强度来确定水深和海底地形。
船用测深仪工作原理
嘿,朋友们!今天咱来唠唠船用测深仪的工作原理。
你想啊,船在大海上航行,就像咱人在陌生的地方走路,得知道前面的路有多深吧,不然一脚踩空了咋办?这船用测深仪就好比是船的“眼睛”,专门负责看水下的情况呢。
它是咋工作的呢?其实啊,就跟咱说话回声一样。
测深仪会发出一个声波,这声波就“噗通”一下往水里钻。
然后呢,声波碰到海底就会反弹回来。
测深仪就等着接收这个反弹回来的声波。
这就好像你在山谷里大喊一声,然后等着听回声一样。
只不过测深仪可聪明多啦,它能根据声波发出去和收回来的时间,算出船到海底的距离。
你说神奇不神奇?就这么“噗通”一声,它就知道水有多深啦!而且啊,这测深仪可不分白天黑夜,不管啥时候都能工作,多靠谱啊!
咱再想想,要是没有测深仪,那船开着开着,万一前面突然水很浅,那不就危险啦?就跟你走路不知道前面有个大坑一样,那不得摔个大跟头啊!
测深仪工作的时候,那可真是一丝不苟呢。
它就那么静静地发出声波,然后静静地等回声,一点都不马虎。
就像一个认真负责的小卫士,时刻守护着船的安全。
你说这测深仪是不是很重要啊?它就像船的贴心小棉袄,默默地为船服务,让船能在大海上安全航行。
咱可得好好感谢发明测深仪的人,让我们在海上航行的时候多了一份保障。
所以啊,朋友们,下次你要是看到船上有个小盒子一样的东西,那可能就是测深仪啦。
别小瞧它哦,它可是有着大本事呢!它能让船在大海上航行得更稳、更安全。
这不就是我们所希望的嘛,让我们的航行平平安安,顺顺利利的!你说对不对呀?
原创不易,请尊重原创,谢谢!。
回声测深仪(echo sounder)一、回声测深原理1.水声学有关知识声波(acoustic wave)声源(acoustic source)。
声波三个频率段:20Hz以下的声波称为次声波(infrasonic wave);20Hz~20KHz称为可闻声波(voiced wave);20KHz以上的称为超声波(ultrasonic)。
频率高、抗干扰性好,被水声仪器广泛利用;同一种均匀理想介质中恒速传播、直线传播;在两种不同的介质面反射、折射或散射传播。
超声波在水中的传播速度我国采用的计算公式:C = 1450+4.06t-0.0366t2+1.137(σ−35)+···国际威尔逊计算公式:C = 1449.2+4.623t-0.0546t2+1.391(σ−35)+·· 式中t为水的度温;σ为水的含盐度;在公式的省略项中还含有水的静压力的因素。
回声测深仪测深原理中,超声波在水中的传播速度取值为1500m/s。
影响超声波在水中传播速度的因素:水温每增加1°C,声速约增加3.3m/s;含盐度每增加1‰,声速约增加1.2m/s;水深每增加100m,声速约增加3.3m/s。
其中,水深的变化引起的静压力和温度的变化,所造成的声速变化值几乎相互抵消。
三个因素中,水温的变化对声速的影响最大,需要进行“补偿”。
超声波在水中传播时的能量损耗:吸收损耗和扩散损耗。
超声波在传播过程中受到的干扰:海洋生物、海水运动、船舶本身等产生的海洋噪声干扰;海水对超声波多次反射形成的混响干扰。
2.回声测深原理 ———————————————————————————————————————————————————————————————————————————————————————— 2在船底安装发射超声波的换能器(transducer)A 和接收反射回波的换能器B回声测深仪的测深原理公式:水深:H = D + hh:船底到海底的垂直距离;D:船舶吃水。
gds101测深仪说明书
BJCS-2型裂缝深度检测仪使用说明,混凝土裂缝测深仪仪器组成:
BJCS-2型混凝土裂缝测深仪主要由主机、收发探头、探头间距自动读取器、线缆等组成。
主机由液晶屏、键盘、控制电路板、锂电池等组成。
BJCS-2型裂缝深度检测仪使用说明,混凝土裂缝测深仪适用范围:
在建筑工程中对混凝土裂缝的深度、宽度及走向进行检测非常必要。
BJCS-2型混凝土裂缝测深仪正是用于混凝土裂缝深度检测的一种实用工程测量仪器。
BJCS-2型裂缝深度检测仪使用说明,混凝土裂缝测深仪工作原理:
当声波在混凝土内传播,穿过裂缝时,在裂缝端点处产生衍射,其衍射角与裂缝深度具有一定的几何关系。
BJCS-2型混凝土裂缝测深仪正是依据衍射角与裂缝深度的几何关系,实现裂缝深度的快速测量。
BJCS-2型裂缝深度检测仪使用说明,混凝土裂缝测深仪主要技术参数
硬件平台
ARM9嵌入式硬件平台,WinCe5.0操作系统,真彩色TFT显示屏,带触摸屏
裂缝深度检测范围
10mm~500mm
裂缝深度检测精度
≤±5%
仪器供电
可充电式锂电池
工作时间
≥28小时
工作温度
-10℃~+50℃工作湿度
≤90%RH。