松下机器人基本操作上课讲义
- 格式:ppt
- 大小:5.50 MB
- 文档页数:16
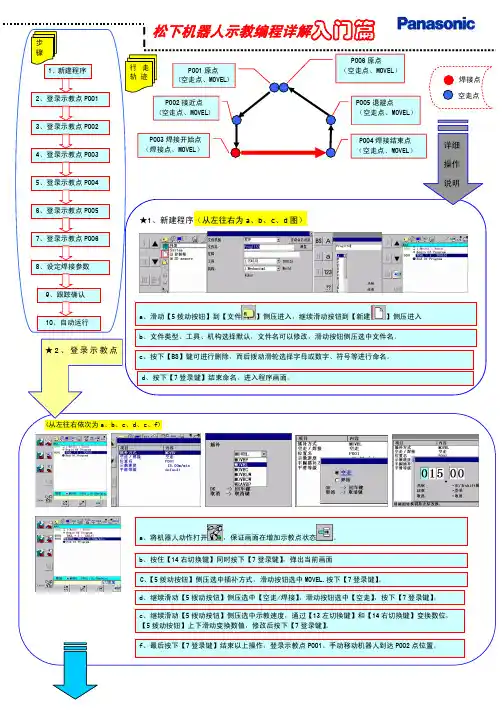
a、滑动【5拨动按钮】到【文件】侧压进入,继续滑动按钮到【新建】侧压进入
b、文件类型、工具、机构选择默认,文件名可以修改,滑动按钮侧压选中文件名。
c、按下【BS】键可进行删除,而后拨动滑轮选择字母或数字、符号等进行命名。
a、将机器人动作打开,保证画面在增加示教点状态。
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、用上述方法对【插补方式】和【空走/焊接】进行选择,并最终按下【7登录键】登录示教点P002。
手动移动机器人到达P003点位置。
★4、登录P003
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、重复以上操作,但这一点应选择【焊接点】,按下【7登录键】登录示教点P003。
手动移动机器到达P004点位置。
★5、登录示教a、关闭机器人动作
将光标移动到P001点,按下复制键
,
点,按下粘贴键
★8、设定焊接参数:d、将光标移动到【ARC-SET】一列侧压滑轮选中。
e、对参数进行设定,侧击滑轮修改数值。
★9、跟踪确认;将光标移到【Begin】一列,把机器人动作打开,选
中跟踪键,加伺服按住【MOVE+】,侧压推动滑轮进行跟踪,跟踪为逐
F3(从左往右依次为a、b 图)
(从左往右依次为a、b 图)
a、b、c、d、e 图)
(从左往右依次为9、10图)
点P002。
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。


松下机器人操作规程一、引言松下机器人是一种先进的自动化设备,广泛应用于工业生产线上。
为了确保机器人的安全运行以及提高生产效率,制定一套操作规程是必要的。
本文将详细介绍松下机器人的操作规程,包括操作前的准备工作、机器人的启动与停止、安全注意事项等内容。
二、操作前的准备工作1. 工作环境准备:a. 确保机器人工作区域的清洁与整洁,避免杂物妨碍机器人的正常运行。
b. 检查工作区域的照明是否充足,确保操作人员可以清晰地观察机器人的运行状态。
c. 确定机器人周围的安全区域,设置警示标识并保持通畅。
2. 操作人员准备:a. 操作人员必须接受相关的培训,了解机器人的基本知识和操作技巧。
b. 穿戴符合安全标准的个人防护装备,包括安全帽、护目镜、手套等。
c. 确保操作人员身体健康,不得患有影响操作能力的疾病。
三、机器人的启动与停止1. 启动机器人:a. 检查机器人的电源是否正常连接,确保电源开关处于关闭状态。
b. 按照机器人的操作手册,按顺序打开各个控制面板上的开关,确保机器人系统能够正常启动。
c. 在机器人启动后,进行必要的系统检查和自检,确保机器人的各项功能正常。
2. 停止机器人:a. 在机器人工作结束后,按照操作手册的要求,依次关闭各个控制面板上的开关。
b. 断开机器人的电源连接,确保机器人完全停止运行。
c. 对机器人进行必要的清洁和维护,保持其良好的工作状态。
四、安全注意事项1. 防止触及机器人:a. 在机器人运行时,操作人员不得触摸机器人的运动部件,以免发生意外伤害。
b. 在必要时,设置机器人的安全围栏或安全光幕,确保操作人员与机器人保持安全距离。
2. 避免异物干扰:a. 在机器人工作区域内,禁止放置任何与机器人工作无关的物品,以免干扰机器人的正常运行。
b. 定期清理机器人周围的杂物,保持工作区域的整洁。
3. 紧急停止机制:a. 在出现紧急情况时,操作人员必须立即按下紧急停止按钮,停止机器人的运行。
b. 紧急停止按钮应明确标识并易于操作,确保在紧急情况下能够迅速采取措施。