Panasonic机器人教学编程设定篇
- 格式:ppt
- 大小:1.92 MB
- 文档页数:33
Panasonic教学编程设定篇Panasonic教学编程设定篇1、简介1.1 本文档旨在介绍Panasonic的教学编程设定方法和流程。
1.2 Panasonic教学编程设定是指为设定指令和程序,使其能根据预定的操作实现特定的功能。
2、硬件要求2.1 Panasonic2.2 电脑或控制台与连接的USB线3、软件安装3.1 Panasonic教学编程软件,安装到电脑或控制台上。
3.2 打开软件,连接。
4、基本设置4.1 首次使用,进行基本设置,包括联网设置、系统语言设置等。
4.2 确保系统正常运行,各部件工作良好。
5、编写程序5.1 确定执行的任务和动作。
5.2 使用教学编程软件创建新的程序。
5.3 编写程序代码,包括运动控制、传感器读取、逻辑判断等。
5.4 调试程序,排查可能的错误。
6、程序和执行6.1 连接和电脑。
6.2 将编写好的程序到。
6.3 在上执行程序,观察的行为。
7、程序参数调整7.1 如有需要,调整程序中的参数,以满足实际应用需求。
7.2 重新和执行调整后的程序。
7.3 不断进行测试和调整,直至行为符合预期。
8、程序保存和备份8.1 将编写好的程序保存到电脑或控制台上,进行备份。
8.2 定期进行程序的备份和更新,以防止数据丢失或程序错误。
附件:1、Panasonic教学编程软件安装包2、基本设置说明3、编程示例代码法律名词及注释:1、版权:指作者对其创作的作品享有的权利。
2、专利:指为了鼓励技术创新和知识共享,国家授予发明人或其他人在技术领域的知识创造上所取得的一种独占权利。
3、商标:指标识企业商品和服务的符号,可以是文字、图形、字母、数字或其组合,用以区别企业和其他企业的商品和服务。
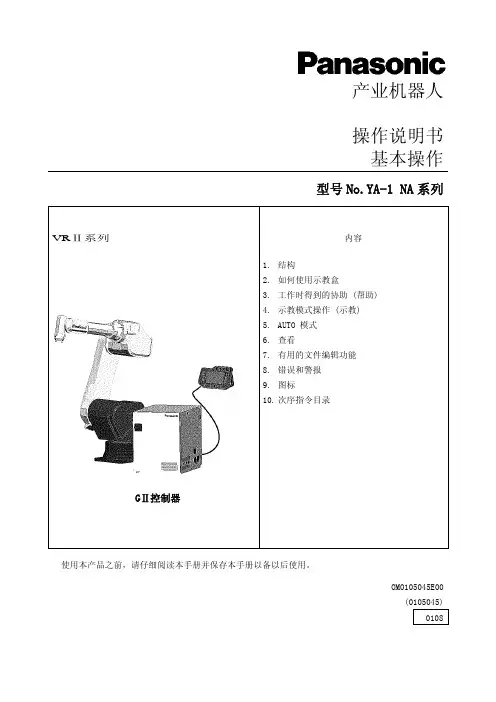
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
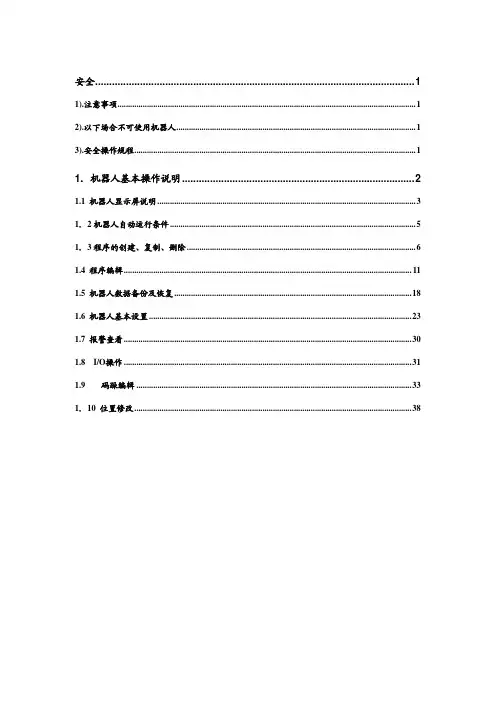
安全 (1)1).注意事项 (1)2).以下场合不可使用机器人 (1)3).安全操作规程 (1)1.机器人基本操作说明 (2)1.1 机器人显示屏说明 (3)1.2机器人自动运行条件 (5)1.3程序的创建、复制、删除 (6)1.4 程序编辑 (11)1.5 机器人数据备份及恢复 (18)1.6 机器人基本设置 (23)1.7 报警查看 (30)1.8 I/O操作 (31)1.9码跺编辑 (33)1.10 位置修改 (38)安全1).注意事项1.FANUC机器人所有者、操作者必须对自己,机器人周边人员和设备的安全负责。
FANUC 不对错误使用机器人的安全问题负责。
FANUC提醒用户在使用FANUC机器人时必须使用安全设备,必须遵守安全条款。
2. FANUC机器人程序的设计者、机器人系统的设计和调试者、安装者必须熟悉FANUC 机器人的编程方式和系统应用及安装。
3. FANUC机器人和其他设备有很大的不同,在于机器人可以以很高的速度移动很大的距离。
2).以下场合不可使用机器人1,燃烧的环境2.有爆炸可能的环境3.无线电干扰的环境4.水中或其他液体中5.运送人或动物6.攀附7.其他!FANUC公司不为错误使用的机器人负责。
3).安全操作规程3.1).示教和手动机器人1)禁止带手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5)机器人周围区域必须清洁、无油,水及杂质等。
3.2).生产运行1)在开机运行前,须清楚了解机器人根据所编程序将要执行的全部任务。
2)必须清楚了解所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须清楚了解机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下使用这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
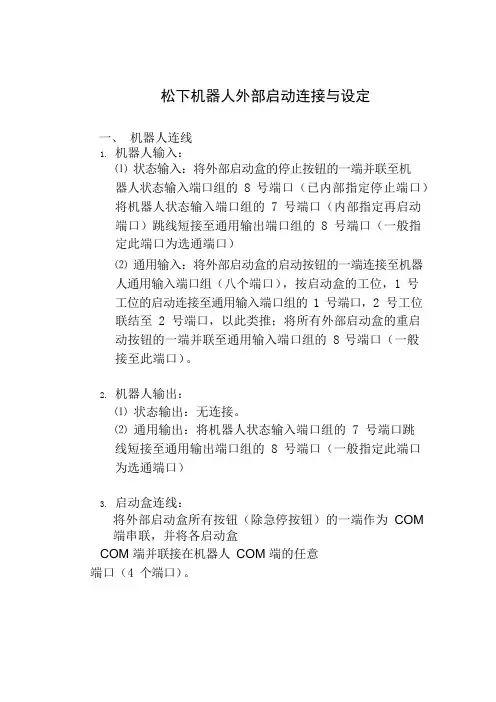
松下机器人外部启动连接与设定一、机器人连线1.机器人输入:⑴ 状态输入:将外部启动盒的停止按钮的一端并联至机器人状态输入端口组的 8 号端口(已内部指定停止端口)将机器人状态输入端口组的 7 号端口(内部指定再启动端口)跳线短接至通用输出端口组的 8 号端口(一般指定此端口为选通端口)⑵ 通用输入:将外部启动盒的启动按钮的一端连接至机器人通用输入端口组(八个端口),按启动盒的工位,1 号工位的启动连接至通用输入端口组的 1 号端口,2 号工位联结至 2 号端口,以此类推;将所有外部启动盒的重启动按钮的一端并联至通用输入端口组的 8 号端口(一般接至此端口)。
2.机器人输出:⑴ 状态输出:无连接。
⑵ 通用输出:将机器人状态输入端口组的 7 号端口跳线短接至通用输出端口组的 8 号端口(一般指定此端口为选通端口)3.启动盒连线:将外部启动盒所有按钮(除急停按钮)的一端作为COM 端串联,并将各启动盒COM 端并联接在机器人COM 端的任意端口(4 个端口)。
二、机器人设定(1)接好线后,打开电源。
示教盒处于示教状态;(2)打开机器人菜单栏的“设定”选项,选择控制柜,启动方式;(3)选择“自动方式”,“编号方式”,“信号方式”;(4)选择“配置输入”,确认“1”设定为 1 号端口,“2”设定为 2 号端口,“4”设定为 3 号端口(这里的 1,2,4 是指端口 1,2,3 所对应的程序“Prog0001”,“P rog0002”,“Prog0004”的简写);(5)选择“配置输出”,确认“选通”设定为 8 号端口(通用输出端口组);(6)回到“设定”,选择“I/O”,最后一项“状态输入输出”,在小窗口中找到“外部在启动”,选择并设定为“有效”及8 号端口(通用输入端口组),完成设定。
注:可以编写一些处于工位上的简单动作程序,并肩其通过对应工位的调用程序的“CALL”命令调用,来确认启动盒的连线与设定是否正确。
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
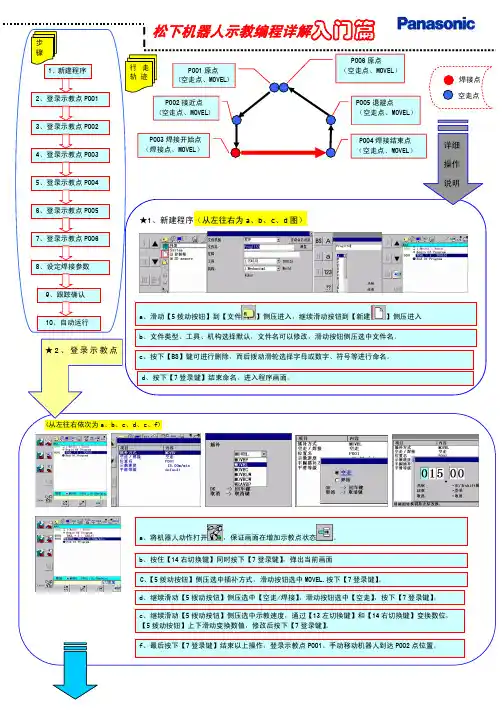
a、滑动【5拨动按钮】到【文件】侧压进入,继续滑动按钮到【新建】侧压进入
b、文件类型、工具、机构选择默认,文件名可以修改,滑动按钮侧压选中文件名。
c、按下【BS】键可进行删除,而后拨动滑轮选择字母或数字、符号等进行命名。
a、将机器人动作打开,保证画面在增加示教点状态。
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、用上述方法对【插补方式】和【空走/焊接】进行选择,并最终按下【7登录键】登录示教点P002。
手动移动机器人到达P003点位置。
★4、登录P003
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、重复以上操作,但这一点应选择【焊接点】,按下【7登录键】登录示教点P003。
手动移动机器到达P004点位置。
★5、登录示教a、关闭机器人动作
将光标移动到P001点,按下复制键
,
点,按下粘贴键
★8、设定焊接参数:d、将光标移动到【ARC-SET】一列侧压滑轮选中。
e、对参数进行设定,侧击滑轮修改数值。
★9、跟踪确认;将光标移到【Begin】一列,把机器人动作打开,选
中跟踪键,加伺服按住【MOVE+】,侧压推动滑轮进行跟踪,跟踪为逐
F3(从左往右依次为a、b 图)
(从左往右依次为a、b 图)
a、b、c、d、e 图)
(从左往右依次为9、10图)
点P002。