自动控制理论第六章
- 格式:ppt
- 大小:997.09 KB
- 文档页数:35

第六章6-1 试求图6-T-1所示超前网络和滞后网络的传递函数和伯德图。
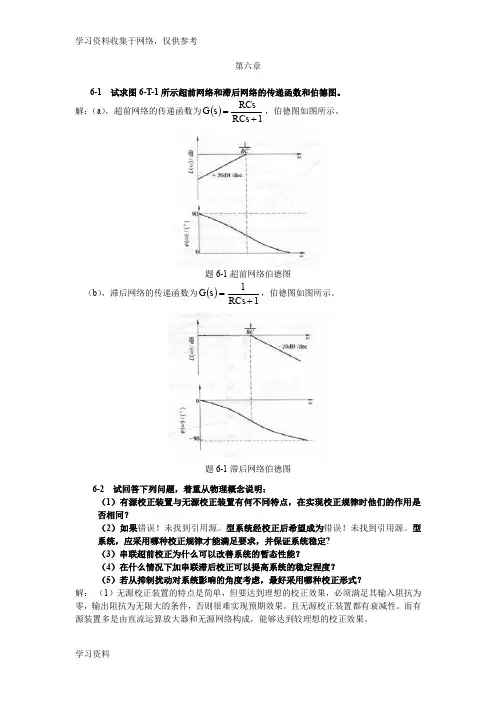
解:(a ),超前网络的传递函数为()1+=RCs RCss G ,伯德图如图所示。
题6-1超前网络伯德图(b ),滞后网络的传递函数为()11+=RCs s G ,伯德图如图所示。
题6-1滞后网络伯德图6-2 试回答下列问题,着重从物理概念说明:(1)有源校正装置与无源校正装置有何不同特点,在实现校正规律时他们的作用是否相同?(2)如果错误!未找到引用源。
型系统经校正后希望成为错误!未找到引用源。
型系统,应采用哪种校正规律才能满足要求,并保证系统稳定? (3)串联超前校正为什么可以改善系统的暂态性能?(4)在什么情况下加串联滞后校正可以提高系统的稳定程度?(5)若从抑制扰动对系统影响的角度考虑,最好采用哪种校正形式?解: (1)无源校正装置的特点是简单,但要达到理想的校正效果,必须满足其输入阻抗为零,输出阻抗为无限大的条件,否则很难实现预期效果。
且无源校正装置都有衰减性。
而有源装置多是由直流运算放大器和无源网络构成,能够达到较理想的校正效果。
(2)采用比例-积分校正可使系统由I 型转变为II 型。
(3)利用串联超前校正装置在剪切频率附近提供的相位超前角,可增大系统的相角裕度 ,从而改善系统的暂态性能。
(4)当ω减小,相频特性)(ωϕ朝0方向变化且斜率较大时,加串联滞后校正可以提高系统的稳定程度。
(5)可根据扰动的性质,采用带有积分作用的串联校正,或采用复合校正。
6-3 某单位反馈系统的开环传递函数为6418)(2++=s s s G (1)计算校正前系统的剪切频率和相角裕度。
(2)串联传递函数为1125.014.0)(++=s s s G c 的超前校正装置,求校正后系统的剪切频率和相角裕度。
(3)串联传递函数为1100110)(++=s s s G c 的滞后校正装置,求校正后系统的剪切频率和相角裕度。
(4)讨论串联超前校正、串联滞后校正的不同作用。