GPS接收机的灵敏度分析
- 格式:docx
- 大小:37.04 KB
- 文档页数:2
手持GPS接受机定位精度分析及提高方法探讨手持GPS接受机定位精度分析及提高方法探讨【摘要】通过对手持GPS接收机的定位原理和影响因素入手,对其定位精度进行了系统的分析研究,并在此基础上对提高定位精度的均值法进行了验证。
结果表明:1)在一定程度上,连续观测时间越长,其定位精度越高;2)均值法可以很好的提高定位精度。
【关键词】接收机定位精度均值法A hand—held GPS receiver location accuracy analysis and improving methodZhang Bo Lin(The first team of Coalfield Berean of Henan Province Xinzheng 451150 China)Abstract:We studied the positioning precision through the positioning principle and influence factors of the handheld GPS receiver, and on this basis we verfied the mean value method that is used to improve the positioning accuracy. The results show that: 1) to some extent, the continuous observation time is longer, the higher positioning precision ; 2) the averaging method can well improve the positioning precision。
Key words:receiver positioning accuracy averaging method中图分类号:P228。
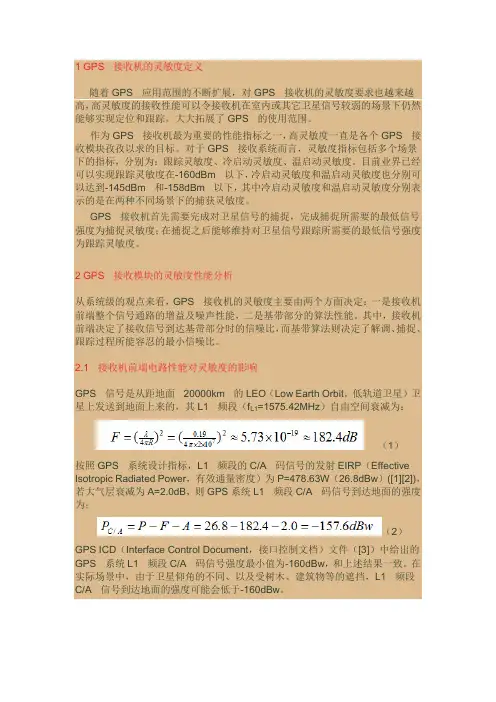
1 GPS接收机的灵敏度定义随着GPS应用范围的不断扩展,对GPS接收机的灵敏度要求也越来越高,高灵敏度的接收性能可以令接收机在室内或其它卫星信号较弱的场景下仍然能够实现定位和跟踪,大大拓展了GPS的使用范围。
作为GPS接收机最为重要的性能指标之一,高灵敏度一直是各个GPS接收模块孜孜以求的目标。
对于GPS接收系统而言,灵敏度指标包括多个场景下的指标,分别为:跟踪灵敏度、冷启动灵敏度、温启动灵敏度。
目前业界已经可以实现跟踪灵敏度在-160dBm以下,冷启动灵敏度和温启动灵敏度也分别可以达到-145dBm和-158dBm以下,其中冷启动灵敏度和温启动灵敏度分别表示的是在两种不同场景下的捕获灵敏度。
GPS接收机首先需要完成对卫星信号的捕捉,完成捕捉所需要的最低信号强度为捕捉灵敏度;在捕捉之后能够维持对卫星信号跟踪所需要的最低信号强度为跟踪灵敏度。
2 GPS接收模块的灵敏度性能分析从系统级的观点来看,GPS接收机的灵敏度主要由两个方面决定:一是接收机前端整个信号通路的增益及噪声性能,二是基带部分的算法性能。
其中,接收机前端决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕捉、跟踪过程所能容忍的最小信噪比。
2.1接收机前端电路性能对灵敏度的影响GPS信号是从距地面20000km的LEO(Low Earth Orbit,低轨道卫星)卫星上发送到地面上来的,其L1频段(f L1=1575.42MHz)自由空间衰减为:(1)按照GPS系统设计指标,L1频段的C/A码信号的发射EIRP(Effective Isotropic Radiated Power,有效通量密度)为P=478.63W(26.8dBw)([1][2]),若大气层衰减为A=2.0dB,则GPS系统L1频段C/A码信号到达地面的强度为:(2)GPS ICD(Interface Control Document,接口控制文档)文件([3])中给出的GPS系统L1频段C/A码信号强度最小值为-160dBw,和上述结果一致。
接收机灵敏度分析
噪声性能是影响接收机灵敏度的关键因素之一、在接收机的前端,会存在各种噪声源,包括热噪声、放大器的噪声等。
热噪声是由于接收机系统中的电阻上的热运动所引起的,它是一个与频率无关的噪声源,可以通过降低系统的温度来减小热噪声。
而放大器的噪声主要来自于放大器自身的噪声系数,噪声系数越小,接收机的灵敏度就越高。
因此,要提高接收机的灵敏度,需要在设计中降低噪声源,并提高放大器的噪声系数。
增益控制技术也对接收机的灵敏度有很大影响。
在接收机中,信号会经过多个放大器进行放大,每个放大器的增益都会对接收机的灵敏度产生影响。
一般来说,增益越大,接收机的灵敏度就越高。
但是,过大的增益也会带来一些问题,比如增加了噪声源的放大、增加了信号的非线性失真等。
所以,在接收机设计中需要合理选择放大器的增益,避免灵敏度过高导致系统性能下降。
射频前端的设计也是接收机灵敏度分析的重要方面之一、射频前端是指接收机的前置放大器、滤波器、混频器等部分。
合理设计射频前端可以提高接收机的灵敏度。
在射频前端设计中,要尽量减小信号的损耗,提高信号的输入功率。
同时,还要设计适当的滤波器来抑制杂散信号,提高接收机对目标信号的检测和区分能力。
另外,混频器的选择和设计也是必不可少的一环,它是将高频信号转换为中频信号的关键组件,直接影响到接收机的灵敏度和动态范围。
总的来说,接收机灵敏度的分析需要综合考虑噪声性能、增益控制技术和射频前端的设计等方面。
通过合理的设计和调整,可以提高接收机的灵敏度,实现更远距离、更高质量和更大容量的无线通信。
GPS相关知识整理一、何为热启动、暖启动和冷启动。
1.热启动就是GPS关闭不久后的再开启,相当于是卫星收讯不佳、失联,再度获取定位的时间。
2.暖启动就是一般开机,包括GPS 自我测试、取得精确星历至定位完成,就是有星历资料[Almanac],没有导航讯息[Current Ephemeris (nav message) ],其前提是离上次关机移动距离在100公里内、速率在25m/sec 下。
3.冷启动开机后GPS接收器需执行一连串如下载星历等的初始化动作,也称为初始值。
所以不管什么开机,可能情形就是……完全没有资料…有星历,但没正确时间或所在位置…有星历、时间、位置,而且短暂定位资料尚未过期…关机前不久已定位完成(两小时内),有足够资料二、GPS的TTFF和C/N、C/No值1.所谓TTFF 就是Time To First Fix 的简称2.C/N值,指GPS接收机收到的GPS卫星信号的强度值,用以标明GPS接收机的品质,跟接收天线、LNA设计、系统EMC等均相关。
C/N包括一切噪音。
C/No=10* Log(C/KTB)﹐不包括天線到Correlator的PATH LOSS及LNA等線路引進的噪音。
C是指信號強度﹐K是指波爾茲蔓常數﹐T是溫度﹐B是等效噪音帶寬。
C/N的計算公式與C/No公式是一樣的﹐只是C/N中包含了接收機本身影響。
三、GPS接受能力的分析(灵敏度)。
dBm(1毫瓦的分贝数)dBm是一个表示功率绝对值的值(也可以认为是以1mW功率为基准的一个比值),计算公式为:10log(功率值/1mw)。
[例] 如果功率P为1mw,折算为dBm后为0dBm。
[例] 对于0.01mW的功率,按dBm单位进行折算后的值应为:10log(0.01/1)=-20dBm。
这个数值越大,表明信号越好。
由于GPS信号强度一般较小,折算成为dBm一般都是负数根据上面对C/N、C/No值的解释,可以得出同dBm下,C/N、C/No值越大,模块性能越好。
GPS相关知识整理一、何为热启动、暖启动和冷启动。
1.热启动就是GPS关闭不久后的再开启,相当于是卫星收讯不佳、失联,再度获取定位的时间。
2.暖启动就是一般开机,包括GPS 自我测试、取得精确星历至定位完成,就是有星历资料[Almanac],没有导航讯息[Current Ephemeris (nav message) ],其前提是离上次关机移动距离在100公里内、速率在25m/sec 下。
3.冷启动开机后GPS接收器需执行一连串如下载星历等的初始化动作,也称为初始值。
所以不管什么开机,可能情形就是……完全没有资料…有星历,但没正确时间或所在位置…有星历、时间、位置,而且短暂定位资料尚未过期…关机前不久已定位完成(两小时内),有足够资料二、GPS的TTFF和C/N、C/No值1.所谓TTFF 就是Time To First Fix 的简称2.C/N值,指GPS接收机收到的GPS卫星信号的强度值,用以标明GPS接收机的品质,跟接收天线、LNA设计、系统EMC等均相关。
C/N包括一切噪音。
C/No=10* Log(C/KTB)﹐不包括天線到Correlator的PATH LOSS及LNA等線路引進的噪音。
C是指信號強度﹐K是指波爾茲蔓常數﹐T是溫度﹐B是等效噪音帶寬。
C/N的計算公式與C/No公式是一樣的﹐只是C/N中包含了接收機本身影響。
三、GPS接受能力的分析(灵敏度)。
dBm(1毫瓦的分贝数)dBm是一个表示功率绝对值的值(也可以认为是以1mW功率为基准的一个比值),计算公式为:10log(功率值/1mw)。
[例] 如果功率P为1mw,折算为dBm后为0dBm。
[例] 对于0.01mW的功率,按dBm单位进行折算后的值应为:10log(0.01/1)=-20dBm。
这个数值越大,表明信号越好。
由于GPS信号强度一般较小,折算成为dBm一般都是负数根据上面对C/N、C/No值的解释,可以得出同dBm下,C/N、C/No值越大,模块性能越好。
GPS全球定位系统工作原理和精度分析引言:全球定位系统(GPS)是一种利用地球上的卫星系统来确定和跟踪目标位置的技术。
它的原理是利用地面接收器接收来自卫星的信号,并通过运算来计算目标的位置坐标。
本文将介绍GPS的工作原理和精度分析。
一、GPS的工作原理GPS系统由三个基本组件组成:卫星系统、控制系统和用户接收器。
1.1 卫星系统GPS系统使用24颗工作卫星,它们均匀分布在地球的轨道上,确保在任何时间和任何地点都能接收到至少4颗卫星的信号。
这些卫星以恒定的速度绕地球运行,并以精确的时间间隔发射信号。
1.2 控制系统GPS系统的控制系统由地面站组成,负责监控和维护卫星的运行状态。
地面站通过精确的测量和计算,提供卫星的轨道参数和钟差数据,以确保卫星信号的准确性。
1.3 用户接收器用户接收器是GPS系统的最后一个组件,用于接收来自卫星的信号,并利用这些信号计算目标的位置。
用户接收器通常由天线、接收器和计算模块组成。
它通过测量卫星信号的到达时间差来计算目标的位置。
用户接收器通过接收至少4颗卫星的信号来确定三维坐标,并通过对这些信号的计算来获取目标的精确位置。
二、GPS的精度分析GPS系统的精度可以受到多种因素的影响。
以下是一些主要因素:2.1 卫星几何卫星几何是指卫星的相对位置和高度。
如果卫星分布很均匀,覆盖范围广,GPS系统的精度就会更高。
2.2 天气条件恶劣的天气条件,如大雨、大雪或浓雾,会影响GPS信号的传播和接收。
此外,太阳活动也可能干扰GPS系统的信号传输,导致精度下降。
2.3 接收器性能用户接收器的性能也会对GPS的精度产生影响。
高质量的接收器通常具有更好的灵敏度和抗干扰能力,能够提供更准确的测量结果。
2.4 接收器位置用户接收器的位置也对GPS系统的精度产生影响。
建筑物、树木或其他遮挡物可能阻挡卫星信号的接收,从而影响GPS定位的准确性。
2.5 信号传播延迟GPS信号在通过大气层时会受到传播延迟的影响。
全球定位系统设备的精度评估与校正方法全球定位系统(Global Positioning System, GPS)是一种通过卫星定位技术来确定地理位置的系统。
随着技术的不断发展,GPS设备在我们的日常生活中发挥着越来越重要的作用。
人们常常使用GPS设备导航行驶、追踪物品、甚至用于军事等方面。
然而,准确的定位对于许多应用来说至关重要,因此我们需要评估和校正GPS设备的精度。
本文将介绍一些常用的GPS精度评估和校正方法。
在评估GPS设备的精度之前,首先需要了解GPS定位误差的来源。
GPS定位误差主要包括卫星钟差、大气延迟、接收机钟差、多径效应、几何精度等因素。
这些因素可以互相影响,并对定位的精度产生不同程度的影响。
一种常用的GPS精度评估方法是对同一位置进行多次测量,并计算出平均误差。
例如,可以在一个固定位置上放置GPS设备,然后进行一系列连续的定位测量。
通过对这些测量结果进行统计分析,可以得到GPS设备的平均定位误差。
这种方法可以帮助我们了解GPS设备的整体性能,但它并不能提供对不同位置的定位精度的具体信息。
为了更准确地评估GPS设备的定位精度,我们可以使用多点校正法。
这种方法要求我们在不同的位置上进行测量,并记录下每个位置的实际坐标。
然后,将这些实际坐标与GPS设备测量得到的坐标进行比较,计算出定位误差。
通过分析这些误差数据,我们可以确定GPS设备在不同位置上的定位精度,并进一步优化校正方法。
这种方法的优势在于可以提供更为细致的定位精度信息,从而帮助我们更好地理解GPS设备的定位性能。
除了评估GPS设备的精度,我们还需要校正GPS设备的误差。
一种常用的校正方法是差分定位法。
差分定位法通过将一个已知位置的GPS设备与待测设备进行对比测量,从而消除定位误差。
具体而言,我们可以将一个高精度的GPS设备称为参考站,将待测设备称为流动站。
参考站和流动站同时进行测量,参考站记录下其实际坐标以及接收到的GPS信号数据。
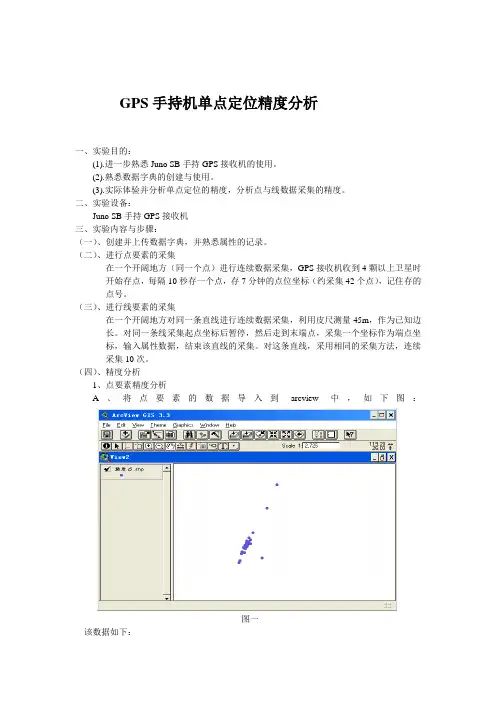
GPS手持机单点定位精度分析一、实验目的:(1).进一步熟悉Juno SB手持GPS接收机的使用。
(2).熟悉数据字典的创建与使用。
(3).实际体验并分析单点定位的精度,分析点与线数据采集的精度。
二、实验设备:Juno SB手持GPS接收机三、实验内容与步骤:(一)、创建并上传数据字典,并熟悉属性的记录。
(二)、进行点要素的采集在一个开阔地方(同一个点)进行连续数据采集,GPS接收机收到4颗以上卫星时开始存点,每隔10秒存一个点,存7分钟的点位坐标(约采集42个点),记住存的点号。
(三)、进行线要素的采集在一个开阔地方对同一条直线进行连续数据采集,利用皮尺测量45m,作为已知边长。
对同一条线采集起点坐标后暂停,然后走到末端点,采集一个坐标作为端点坐标,输入属性数据,结束该直线的采集。
对这条直线,采用相同的采集方法,连续采集10次。
(四)、精度分析1、点要素精度分析A、将点要素的数据导入到arcview中,如下图:图一该数据如下:表一B、将数据导入Excel中,并计算横、纵坐标的平均值、最大值、最小值、方差。
2、线要素精度分析A、将线要素的数据导入到arcview中,如下图:图二数据如下图:表二B、将数据导入Excel中,计算直线长度的平均值、最大值、最小值、与已知长度的绝对误差、相对误差。
绝对误差与相对误差公式如下:a、绝对误差=观测值-真实值b、相对误差=(观测值-真实值)/真实C、由于在测量的过程中,出现操作失误,选取的有效线条进行计算。
四、实验结果分析1.点要素的平均值、最大值、最小值及方差如下表格:2.点要素的结果分析:在做实验的过程中有好几个点与实际测量点的距离差了很多(如图一),横纵坐标的最大值与最小值的差别比较大,同时方差也比较大。
这是由于在实验过程中不同时间卫星定位的数据之间有所偏差,每次操作时记录的点位之间有所偏差。
对实验产生了误差。
3.线要素的实验结果如下:线要素的数据如表二,但由于操作上的失误,选取六条比较接近实际测量的线进行分析。
导航接收机指标分析及测试导航接收机是导航系统中的重要组成部分,它可以接收来自卫星的导航信号,并通过信号处理和解算处理,计算出准确的位置、速度和时间信息。
导航接收机的性能指标对于导航系统的精度和性能至关重要,因此进行指标分析和测试是必不可少的。
首先,导航接收机的灵敏度是一个重要的指标。
灵敏度表示接收机能够接收到的最小有效信号功率。
导航卫星发射的信号非常微弱,所以接收机的灵敏度必须足够高,以便在低信噪比环境下可靠地接收到信号。
为了测试导航接收机的灵敏度,可以使用各种信号源模拟低信噪比环境,通过逐步降低信号功率,观察接收机的工作情况,找出其最低可接收信号功率。
其次,导航接收机的定位精度是另一个重要的指标。
定位精度表示接收机根据接收信号计算出的位置与真实位置之间的误差。
为了评估接收机的定位精度,可以使用精确的位置测量仪器作为参考,通过与接收机计算出的位置进行对比,计算出定位误差。
此外,还可以使用卫星导航系统的辅助信息进行定位校准,如地面测量点坐标、差分GPS技术等,提高定位精度。
第三,导航接收机的跟踪性能也是需要测试的指标之一、跟踪性能表示接收机在快速移动或者多路径干扰环境中跟踪导航信号的能力。
跟踪性能包括跟踪卫星数目、跟踪信噪比和跟踪灵敏度等方面。
为了评估导航接收机的跟踪性能,可以使用不同方向运动的模拟器来模拟快速移动的情况,利用不同强度的干扰信号来模拟多路径干扰的情况,观察接收机的跟踪情况。
最后,导航接收机的时钟精度也是一个需要测试的指标。
时钟精度表示接收机计算时间的准确性。
为了测试时钟精度,可以使用精确的时间信号源作为参考,通过与接收机计算的时间进行比较,评估时钟的准确性。
总结来说,导航接收机的性能指标包括灵敏度、定位精度、跟踪性能和时钟精度等。
测试这些指标可以通过模拟各种环境条件、使用精确的参考测量设备和信号源,来评估接收机的性能和指标是否达到要求。
只有通过全面的指标分析和测试,才能确保导航接收机的良好性能,提高导航系统的精度和可靠性。
接收灵敏度原理算法接收灵敏度是检验基站接收机接收微弱信号的能力,它是制约基站上行作用距离的决定性技术指标,也是RCR STD-28协议中,空中接口标准要求测试的技术指标之一。
合理地确定接收灵敏度直接地决定了大基站射频收发信机的性能及其可实现性。
它是对CSL系统的接收系统总体性能的定量衡量。
接收灵敏度是指在确保误比特率(BER)不超过某一特定值的情况下,在用户终端天线端口测得的最小接收功率,这里BER通常取为0.01。
接收机的接收灵敏度可以用下列推导得出:根据噪声系数的定义,输入信噪比应为:(S/N)i=NF(S/N)o其中NF为噪声系数,输入噪声功率Ni=kTB。
当(S/N)o为满足误码率小于10-2时,即噪声门限,则输入信号的功率Si即为接收灵敏度:Si=kTBNFSYS(S/N)o (1)其中:k:波尔兹曼常数(1.38×10-23 J/K);T:绝对温度(K);B:噪声带宽(Hz);NFSYS:收信机噪声系数;(S/N)o:噪声门限。
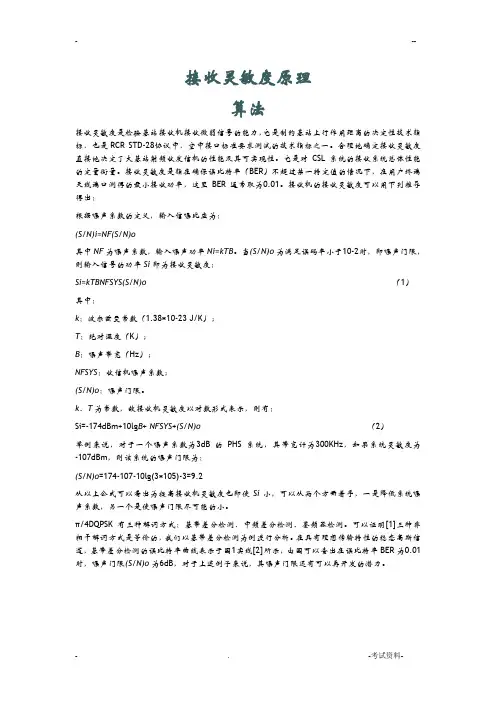
k、T为常数,故接收机灵敏度以对数形式表示,则有:Si=-174dBm+10lg B+ NFSYS+(S/N)o (2)举例来说,对于一个噪声系数为3dB的PHS系统,其带宽计为300KHz,如果系统灵敏度为-107dBm,则该系统的噪声门限为:(S/N)o=174-107-10lg(3×105)-3=9.2从以上公式可以看出为提高接收机灵敏度也即使Si小,可以从两个方面着手,一是降低系统噪声系数,另一个是使噪声门限尽可能的小。
π/4DQPSK有三种解调方式:基带差分检测、中频差分检测、鉴频器检测。
可以证明[1]三种非相干解调方式是等价的,我们以基带差分检测为例进行分析。
在具有理想传输特性的稳态高斯信道,基带差分检测的误比特率曲线表示于图1实线[2]所示,由图可以查出在误比特率BER为0.01时,噪声门限(S/N)o为6dB,对于上述例子来说,其噪声门限还有可以再开发的潜力。
GPS接收机的灵敏度分析GPS接收机的灵敏度分析根据GPS 接收机的定位原理和GPS 接收机灵敏度分析接收机性能,发现灵敏度主要与前端电路和基带有着密切关系。
据此对GPS 的天线前端电路设计滤波器和低噪声放大器,并对电路的其他方面提出要求,考虑包含处理器和大量逻辑门电路的Cyclo ne 器件,并通过配置嵌入式软核处理设计GPS 接收机。
GPS 系统在海运方面因能够提供连续、高精度的船位,在保证船舶安全经济方面和保证在计划航线上航行有着极为重要的作用。
高灵敏度的GPS 接收机要求接收机在卫星信号较弱的场景下仍然能够实现定位和跟踪。
GPS 接收系统的灵敏度指标包括跟踪灵敏度、捕获灵敏度和初始启动灵敏度。
目前GPS 接收机基本上可以实现跟踪灵敏度在- 160 dBm 以下,同时初始启动的灵敏度和捕获灵敏度也分别可以达到- 142dBm 和- 148 dBm 以下。
1 GPS 接收机灵敏度分析GPS 接收机的灵敏度主要由两个方面决定:一是接收机前端信号通路的增益及噪声性能,二是基带部分的算法性能。
接收机前端决定了接收信号到达基带部分时的信噪比; 基带算法则决定了解调、捕获、跟踪过程需要最小信噪比。
GPS 卫星的导航载波信号是L 频段(L 1 :19cm; L2 :24 cm)的电波信号,现行GPS 工作卫星采用L 波段的三种导航信号,分别为L 1、L2、L3 ,其载波频率分别为:1 575 42、1 227 60 和1 381. 05 MHzGPS 信号是从距地面20 000 km 的卫星发送到地面,其L 1频段(f L1 = 1 575. 42 MHz)自由空间衰减为:根据GPS 接口控制文档(interface cONt ro ldocument ,ICD)规定GPS 系统L 1频段C/ A 码信号强度的最小值为- 160 dBW,而GPS 系统设计该频段中C/ A 码信号发射的有效通量密度(effect ive isot ro pic radiated pow er,EIRP)为P=478. 63 W(26. 8 dBW)[4],若大气层衰减为2. 0dBW,那么GPS 系统L 1 频段C/ A 码信号到达地面的强度为:。
GPS 接收机的灵敏度分析The Analysis on the Sensitivity of GPS Receiver深圳市华颖锐兴科技有限公司摘要:GPS 接收机的灵敏度是影响GPS 应用范围的非常关键的指标,目前业界纷纷推出高灵敏度的GPS 接收系统,使得GPS 的室内定位成为可能,大大拓展了GPS 的应用场景。
本文对GPS 接收机的灵敏度性能进行原理性分析,并给出了设计高灵敏度GPS 接收模块的建议。
关键词:GPS 高灵敏度 接收机设计Abstract: High sensitivity is a key feature for GPS receiver to extend its application field. A lot of high sensitivity GPS receiver chipsets has been put forward in the industry, making the indoor positioning possible. This paper analyzes the principle of the high sensitivity from both RF part and baseband part, and gives some advices on the design of high sensitivity GPS receiver. Key words: GPS, High Sensitivity, Receiver Design1 GPS 接收机的灵敏度定义随着GPS 应用范围的不断扩展,业界对GPS 接收机的灵敏度要求也越来越高,高灵敏度的接收性能可以令接收机在室内或其它卫星信号较弱的场景下仍然能够实现定位和跟踪,大大拓展了GPS 的使用范围。
作为GPS 接收机最为重要的性能指标之一,高灵敏度一直是各个GPS 接收模块孜孜以求的目标。
接收灵敏度原理算法接收灵敏度是检验基站接收机接收微弱信号的能力,它是制约基站上行作用距离的决定性技术指标,也是RCR STD—28协议中,空中接口标准要求测试的技术指标之一。
合理地确定接收灵敏度直接地决定了大基站射频收发信机的性能及其可实现性。
它是对CSL系统的接收系统总体性能的定量衡量.接收灵敏度是指在确保误比特率(BER)不超过某一特定值的情况下,在用户终端天线端口测得的最小接收功率,这里BER通常取为0.01。
接收机的接收灵敏度可以用下列推导得出:根据噪声系数的定义,输入信噪比应为:(S/N)i=NF(S/N)o其中NF为噪声系数,输入噪声功率Ni=kTB。
当(S/N)o为满足误码率小于10—2时,即噪声门限,则输入信号的功率Si即为接收灵敏度:Si=kTBNFSYS(S/N)o (1)其中:k:波尔兹曼常数(1。
38×10-23 J/K);T:绝对温度(K);B:噪声带宽(Hz);NFSYS:收信机噪声系数;(S/N)o:噪声门限。
k、T为常数,故接收机灵敏度以对数形式表示,则有:Si=—174dBm+10lg B+ NFSYS+(S/N)o (2)举例来说,对于一个噪声系数为3dB的PHS系统,其带宽计为300KHz,如果系统灵敏度为-107dBm,则该系统的噪声门限为:(S/N)o=174-107—10lg(3×105)—3=9.2从以上公式可以看出为提高接收机灵敏度也即使Si小,可以从两个方面着手,一是降低系统噪声系数,另一个是使噪声门限尽可能的小。
π/4DQPSK有三种解调方式:基带差分检测、中频差分检测、鉴频器检测.可以证明[1]三种非相干解调方式是等价的,我们以基带差分检测为例进行分析。
在具有理想传输特性的稳态高斯信道,基带差分检测的误比特率曲线表示于图1实线[2]所示,由图可以查出在误比特率BER为0。
01时,噪声门限(S/N)o为6dB,对于上述例子来说,其噪声门限还有可以再开发的潜力。
关于GPS灵敏度最精彩的讨论,没有之一!论这个议题的主要起因是:灵敏度(sensitivity)是如何确定的?问题:我们经常看到某些GPS芯片商宣称自己的芯片灵敏度是如何的高,但是根据对整个系统的分析可以看出系统的灵敏度主要取决于第一级LNA的设计,GPS产品的灵敏度取决于GPS芯片和放大器的设计,那么就带来下面的问题:1)系统的灵敏度是如何计算的芯片的灵敏度对系统设计有什么影响2)接收GPS信号的功率和信噪比是一个什么样的水平3)如何按照信噪比,信号功率设计系统灵敏度这真是一篇超精华的帖子!感谢楼主和参与的所有人!jinfoxhe:R1 灵敏度的计算公式:S=-174dBm+10*log(BW)+Eb/N0+NF. BW一般为中频带宽,Eb/N0为芯片在一定误码的情况下解调需要的信噪比, NF为系统噪声系数.如果是扩频系统,还需要减去扩频增益.2 对于GSM来说,其灵敏度一般为-110dBm左右(基站),和具体的配置有关系.从仿真来看, GSM的解调Eb/N0为4-5dB.snow99:好象在说GPS, 不是GSM, 虽然看起来很像GPS RF BW: 2.046 MHzModulation: BPSKProcess Gain: 46 dThermal Noise Floor: kTB = -111 dBm/2.046MHzRequired Eb/N0: 6 dB (不太清楚, 可以修正)Receiver NF: 3 dB (Typical)Sensitivity: -111 + 6 + 3 - 46 = -148 dBm这只是一个大致结果, 考虑系统的其他算法以及Doppler校正, 最终灵敏度在-154 ~ -149之间。
Arm720:楼上朋友对灵敏度的描述已经非常清楚了,降低系统的信噪比和噪声系数能提高系统的灵敏度.那么对于设计来说是不是可以这么理解:1)根据灵敏度公式估算系统的接收灵敏度2)根据估算的系统接收灵敏度计算对芯片接收灵敏度的要求芯片接收的灵敏度反映了对前级放大器噪声系数和信噪比的设计要求. 不知我的理解是否正确,如果是这样,估算的原则又是什么那些参考书上有描述,我想详细的研究一下,多谢了!那位测试过GPS信号的朋友能说一下GPS信号的接收功率和信噪比吗?Arm720:看来我的发帖晚了一部,多谢jinfoxhe和snow99兄!不过snow99兄的计算方法和上面公式好像对不上.你描述的是对GPS接收系统的需求,不只这些需求是如何计算出来的. 多谢了!以下是引用jinfoxhe在2006-4-24 8:56:00的发言:1 灵敏度的计算公式:S=-174dBm+10*log(BW)+Eb/N0+NF. BW一般为中频带宽,Eb/N0为芯片在一定误码的情况下解调需要的信噪比, NF为系统噪声系数.如果是扩频系统,还需要减去扩频增益.2 对于GSM来说,其灵敏度一般为-110dBm左右(基站),和具体的配置有关系.从仿真来看, GSM的解调Eb/N0为4-5dB.今天仔细看了看jinfoxhe兄的帖子,发现对关键问题进行了描述'Eb/N0为芯片在一定误码条件下的解调需要的信噪比',也就是说,你选的芯片就决定了接收系统灵敏度的理论值,这个理论值是衡量实际系统能够工作的重要依据.比如,接收系统的灵敏度理论值为-150dBm (该值仅为了举例),如果你在室内测量到的GPS信号为-145dBm,说明你的系统在室内也能工作.上面是个人理解,望大家指正.看来Sow99兄对GPS有丰富的经验,可否大致说明一下这些指标的设计思路啊snow99:我现在不做GPS, 只有一点简单的了解, 这方面也是一知半解.上面给出来的公式有点问题GPS RF基本参数RF BW: 2.046 MHzData Rate: 50 bpsPN Rate: 1.023 MbpsData repeat: 1 msProcess Gain (per data) = 10*LOG(1.023 Mbps / 50 bps) = 43 dBRequired Eb/N0 由基带处理器决定 --- 基带并行相关器数目N和积分时间T, 一般来说, N和T越大, Required Eb/N0 就越低. N增加表示系统复杂度增加, T增加表示启动时间变长.抄一下灵敏度的计算公式:S=-174dBm+10*log(RF BW)+Eb/N0+NF = -111 + Eb/N0+NF比如说SiRF最新的产品有-159DBM的灵敏度, 并且冷启动时间是三十几秒, 说明它有很大数量的相关器, 实际上这个数字 N > 200000 在CDMA/WCDMA/GSM手机上的GPS接收可以由网络协助完成(SA),因此不需要太复杂的基带处理器,并且所需C/N很低,比如17DB-HZ (CDMA/WCDMA)Required Eb/N0 = C/N - 10log(RF BW) = 17 - 63 = -46 dB灵敏度S= -111 + Eb/N0+NF=-111-46+NF=-157+NFNF是接收机从天线到基带的级联噪声系数snow99:这是GPS接收所需C/N与相关器数目N和积分时间T的曲线注意C/N的单位是dB-Hz, Eb/N0 (dB) = C/N - 10log(RF BW) GPS RF BW: 2.046 MHz伽利略系统 RF BW: 4.092 MHzArm720:snow99兄,感谢你的精辟分析!版主该给snow99兄加分了吧!从你的分析,我发现了一个很奇怪的现象:GPS在信号功率小于噪声功率,系统也能正确解码,分析如下:GPS系统灵敏度:S=-174dBm+10*log(RF BW)+Eb/N0+NF = -111 + Eb/N0+NF.也就是说如果GPS接收器系统的灵敏度比-111dBm还要小,意味着 Eb/N小于0,也就是信号功率小于噪声功率,换句话就是信号淹没在噪声中,也能正确解码.分析到这儿,我又有点糊涂了:1) 如果GPS接收信号的功率为-130dBm,比-111dBm小,但是并不意味着信号功率小于噪声功率呀.2) 上面这种情况,如何分析灵敏度,GPS信号功率,信号比之间的关系snow99兄,这个信噪比的要求感觉太小了吧:Required Eb/N0 = C/N - 10log(RF BW) = 17 - 63 = -46 dBjinfoxhe:GPS在信号功率小于噪声功率,系统也能正确解码对的, 这就是扩频带来的好处,提高了系统的灵敏度.缺点就是需要更大的带宽Arm720:本论坛的高人比较多啊!不知噪声功率一般是多少,也就是环境噪声的功率,另外如何计算从天线进入到系统的噪声功率这个问题搞清楚了就能详细分析信号功率,噪声功率和信噪比之间的关系了;然后分析和灵敏度之间的关系Arm720:前面有一个问题没有描述清楚:1) 如果GPS接收信号的功率为-130dBm,比-111dBm小,也就是信噪比为负值,信号功率小于噪声功率,但是此时并不意味着信号功率就小于噪声功率.这就是互相矛盾的地方.那位朋友能说说您的理解和看法今天网上找到一片文章,详细讨论噪声系数的,正在研究中,初步的研究结果是:1)射频系统讨论的噪声是热噪声,也就是这种噪声不是从环境噪声中来,是由电路自身产生的噪声,与外部环境无关;据我的理解如果是从外部环境中来,应该称之为干扰!2)NF (Noise Factor)噪声系数,与信噪比无关,NF描述的是信号在系统热噪声的影响下,对信号影响的描述.对噪声,灵敏度的研究在继续中,希望这几天就有结果,大家也一起来讨论!据我的理解,如果你研究射频,不研究噪声,系统灵敏度度,就不能把握射频系统的设计和全面分析,但是对这种研究比较枯燥;因为没有实物,又不能测量,唯一能做的就是呆板枯燥的公式分析.Submarine:扩频系统的灵敏度S=KTB+Eb/No+NF-Gp,其中Gp为扩频增益.这个和一般的灵敏度计算公式有点不同,就是最后的扩频增益的差别.扩频增益为扩频数据率/基带数据率.tina_whj:据我的理解,如果你研究射频,不研究噪声,系统灵敏度度,就不能把握射频系统的设计和全面分析,但是对这种研究比较枯燥;因为没有实物,又不能测量,唯一能做的就是呆板枯燥的公式分析.强烈赞同,刚开始学习射频知识,感觉特迷茫Arm720:我的研究轨迹,共楼上的朋友作参考.我接触射频时,能感到的问题是匹配,集中精力攻关匹配方面的问题,同时做仿真方面的准备;然后遇到的问题是系统的性能分析,也就是灵敏度吧,现在集中分析灵敏度和噪声问题;可能接下来碰到的问题就是电路实现方面的,要研究微带线,天线方面的内容.好,下面继续噪声方面的讨论感谢submarine朋友对灵敏度给出新的公司描述!正好手上有一篇介绍CDMA的灵敏度文档,确实是如此,但是对于噪声功率,有一个问题一直都想不通.噪声功率的公式为:(是热噪声的功率)Pnoise = KTB (K: 波尔兹曼常数1.38x10的-23次方;T:开氏温度=摄氏温度+273.15,此处T=290;B:equivalent noise bandwidth--不知道怎么翻译,我的理解是带宽) ----- 问题就在这个带宽B上面单位HZ噪声功率 = 4.002x10的-21次方瓦特. Pnoise(dBm) = -174dBm .------ 这就是-174dBm的来历.问题(1)就是: 带宽越宽,噪声功率越大;你系统的带宽越宽,系统的噪声功率越大,这和实际不符;在实际系统中应该是噪声能量大,而不是功率大,功率应该是不变的吧.在看看灵敏度的公式:S=-174dBm+10*log(BW)+Eb/N0+NF. BW一般为中频带宽. 实际上10*log(BW)就是上面公式中的参数B部分;问题(2)得出的结果是系统带宽越宽,灵敏度越低,这是个非常奇怪的结论.Jinfoxhe:带宽越宽,噪声功率越高.这是没错的,其实你说的噪声功率和噪声能量是一回事.S=-174dBm+10*log(BW)+Eb/N0+NF,这是对射频(中频)而言.没有考虑基带的处理增益,如果是扩频系统,Gp会带来灵敏度的提高.'问题(2)得出的结果是系统带宽越宽,灵敏度越低,这是个非常奇怪的结论'这个结论很正常.woshi622:这里有个问题我不太明白S=-174dBm+10*log(扩频后带宽)+Eb/N0+NF-Gp此处的Gp=10*log(扩频后速率/扩频前速率).那么一算的话 S==-174dBm+10*log(扩频前带宽)+Eb/N0+NF 此时的扩频又有什么意义还有,这里应该要加入天线的增益吧,望解答everyday:以下是引用woshi622在2006-4-27 10:02:00的发言:S=-174dBm+10*log(BW)+Eb/N0+NF此处的Eb/N0应该已经包含了扩频增益.还有,这里应该要加入天线的增益吧,望解答这个灵敏度是做天线以后的计算公式.如果你要从天线端算,应该加天线的增益,但是天线的增益并不是每个方向都是一样的.所以一般公式都没有加.Ayuyu:通常我们说的的噪声基低-174dBm,其实它是常温下热噪声功率谱密度,准确的单位应该是dBm/Hz.是单位Hz上的热噪声功率.所以带宽越宽,频域积分的功率就越大,但是常温下热噪声的功率谱密度是不变的.SNR就是信噪比比.就是信号和噪声功率比,它等于Eb*R/(N0*B),R 是数据比特速率,B是信号占用带宽而不是RF/IF通道的带宽.在扩频系统中通常和扩频信号的chip rate取同样的值.Eb/N0的概念是每比特能量和噪声功率谱密度的比值.如果只考虑热噪声,系统容量(数据比特速率)和它占用的带宽比值趋于零,那么Eb/N0有个理论极限值就是香农极限-1.6dB. 从香农公式R=B*log2(1+SNR)可看出,传输的数据速率一定,信号的功率一定,增大传输信号占用带宽,可以降低系统对SNR的要求也就是降低对Eb/N0的要求.扩频系统就是采用增大信号占用带宽的方法来降低系统对SNR 的要求.GPS也是扩频系统.灵敏度实际上就是指能够满足指定Eb/N0的最小信号功率.如果数据比特速率R一定,增大信号占用带宽B,此时带宽内的噪声功率N0*B 增加,到了一个程度可以使得SNR<0db,就是说在这个带宽内信号功率eb*r小于噪声功率n0*b,信号淹没在噪声里,但是eb>0db,就是说在这个带宽内信号功率eb*r小于噪声功率n0*b,信号淹没在噪声里,但是eb> 所以SNR LNA到ADC之间的放大倍数为 124dBArm720:woshi622朋友,我在逐渐写出我最近想到和碰到的问题,我现在对于你的问题也没有定量的研究,我也想知道,如果你近期有研究成果,欢迎发表!我最近较忙,没有时间做研究和仿真了,只能业余时间研究一下;扩频带宽和灵敏度之间的关系,应该有一个曲线来描述,曲线拐点就是最优的值.希望大家一起来研究,各位朋友的观点和意见能起到抛砖引玉和指引方向的目的,我就是沿着这个方向研究的,但是更进一步的理解还是需要个人去找参考书来加深学习.这个论坛很好,资料很多,一起讨论的朋友也热心和多呀.woshi622:通过我对一些扩频项目标书的研究,发现扩频增益并不能直接影响接收灵敏度的,改变的只是信号在传输时对一些特定信号的抗干扰能力,如一些窄带功率很大的信号Cmin=C/No+Rb-Gviterbo+L-G/T-K(L为解扩损耗)如有不对,希望能够指正ayuyu:其实最有意义的是SNR或Eb/N0.灵敏度并没有多少意义Arm720:同意前面woshi622 和 ayuyu兄的观点,扩频不能带来灵敏度上的任何提高,只能增强系统的抗干扰能力 ---- 没有见到权威资料描述0,欢迎讨论!扩频系统灵敏度公式1:Sin (dBm) = NF (dB) + KTB(dBm) + Eb/No (dB) - Gp (dB)扩频系统灵敏度公式2:Sin (dBm) = NF (dB) + KTB(dBm) + SNR(dB) ---> SNR = Sout/Nout (dB)实际上公式2才是灵敏度的表达式,为什么要转化为Eb/N0的形式原因在于BER (Bit Error Rate)是通过比特能量Eb来衡量和计算的.先解释一下各个部分的含义:NF:噪声系数 K,T:波尔兹曼常数和开氏温度(此处=290K)B :扩频带宽 Eb : 每比特信号能量 N0:噪声功率谱密度(注意有所不同) = F*KT --- 多一个噪声系数FGp:扩频增益 = B / R (R = 用户数据波特率)实际上Sout/Nout = Eb/N0 - Gp (dB) ; 推导一下这个公式.回顾一下Energy = Power * T -> Power = Energy * 1/T --说明1/T 就是数据波特率也就是Sout = Eb * R ; Nout = F*KTB --- 注意输出噪声有一个噪声系数FSout/Nout = Eb * R / (F*KTB) = (Eb/F*KT) * (R/B) = Eb/N0 * 1/Gp再写一个比较全的灵敏度公式作细化分析:Sin = F * KTB * SNR = F * KTB * Eb/N0 * R/B (mW) ->这个公式的含义就非常清楚了,扩频带宽 B 给约掉了.结论:1)扩频对系统灵敏度没有任何的影响 --- B给约掉了2)扩频提高了抗干扰能力;通过 R/B 看出 --- 为什么使用扩频通讯的原因3)编码算法能有效提高系统灵敏度 ---> 这就是无线通讯为什么人们孜孜不倦的研究高增益的编解码算法的原因;因为编解码是有效降低Eb/N0,提高系统灵敏度,扩大覆盖的半径;今天恍然大悟.到此为止,研究基本告一段落.还有下面的问题没有细化研究:1)Eb 和BER之间的关系,这个非常的复杂,与具体的编解码算法相关. 不做细化研究.感谢各位朋友的热心支持,给出研究方向,灵敏度研究暂告一段落,下面步入微带线和天线的研究,欢迎交流!Arm720:本来以为到此研究就结束了,但是在实现过程中还是会碰到不少的问题.扩频系统灵敏度公式1:Sin (dBm) = NF (dB) + KTB(dBm) + Eb/No (dB) - Gp (dB) ----- 这个公式描述的是系统在理想情况下的灵敏度理论值,也就是你设计的电路系统的极限值,为实际设计和调测作参考,很重要的.系统实测的灵敏度和这个值作比较,就能发现你的系统是否优良,同时也指导你找出原因.实际实现过程中,你的电路系统几乎是达不到这个指标的,因为实际电路中,由于PCB布线,屏蔽,等各方面的原因,引入干扰,降低系统了的信噪比,降低了灵敏度.那么再提出一个问题:电路实现过程中,有哪些手段去提高设计电路的灵敏度我先说一下我的想法,希望各位朋友参与和提供实践上的指导.1)提高实际电路的灵敏度,关键点在第一级的LNA和输入匹配电路的设计2)LNA输入匹配的关键在于最低噪声系数匹配,匹配方法为Gt增益圆,NF噪声圆,稳定圆,找合适的GamaS (不多讨论匹配细节) 上面是传统的匹配步骤,我个人感觉忽略了一个很重要的考虑因数,就是对灵敏度的考虑,我们再把接收到的信号功率在细化的分为几个部分:Paten:天线接收的信号功率Psignal:天线信号经过匹配后的输出信号功率,也就是LNA之前的信号功率Psig_reflect :不完全匹配从LNA反射回的功率 Psig_LNA :LNA接收到的信号功率他们之间的关系为:Psignal = Paten * aFactor (衰减因子) = Psig_LNA + Psig_reflect ---- 这个公式对分析灵敏度很重要实际上对系统有效解码的信号是Psig_LNA -----> 这个为提高电路系统灵敏度提供了理论依据;要知道电路系统实际接收到的信号的从天线接收到的信号,提高灵敏度的途径就是有效降低天线信号功率和LNA吸收信号功率(有时也叫源信号资用功率) 的差值:1) 降低从天线信号功率的衰减因子 --- 和匹配电路相关2) 降低LNA输入系统的反射功率 --- 也许NF匹配就确定了LNA 的反射功率,是否有新型电路结构能降低VSWR,又能降低信号的反射功率.Arm720:希望各位朋友能提供LNA输入级,在实践上灵敏度的指导和理论验证. 在电路实现上,对LNA输入级有哪些方法能达到下面的目的:1)降低匹配系统衰减因子2)既有较低的NF系数,又有较低的VSWR(较低的反射功率)awp666:可以通过选择合适的工作点来选择你需要的NF,如果是VSWR则需要通过匹配电路来实现.不过,NF与Gain是不能同时满足的,因此你需要计算出你认为合适的值,然后选择好LNA的工作点.在SMith原图上,把这个工作点通过匹配网络转回圆心,看看需要什么电路形式,进一步用优化的方式使整个通带都满足你的要求.Arm720:多谢版主!一般情况下LNA设计中,NF,VSWR,增益是互相矛盾的;好的NF,增益又低了,VSWR也大了,总之既要得到好的NF,就不可能得到好的VSWR和增益;在电路中提高系统灵敏度,通过分析实际上要达到的目的是降低NF,同时又降低VSWR;主要是低的VSWR,信号功率损失反射损失低,那么进入LNA进行放大的信号功率增加,达到提高系统灵敏度的目的;感觉我们在NF匹配中,很少考虑VSWR对系统灵敏度的影响.实际电路实现中,有没有一些新颖的电路结构,做到NF也低,VSWR 也低传统的灵敏度描述再修改一下:降低NF 和LNA的VSWR,是提高电路系统灵敏度的有效方式.对于 VSWR 对灵敏度的定量影响还要继续研究一下,希望有朋友能提供实践方面的经验数据等. 多谢!woshi622:有很多书上是在接收灵敏度公式里并没有出现KTB,而是用10LgK+G/T(接收机品质因素)来表示,ARM兄我知道你理论清晰且加资料多,能帮我解释下G/T么Arm720:写个全的灵敏度公式吧,局部没法分析啊,你在哪本书上看过可以用图片的形式把灵敏度的描述这个部分贴出来,我试着分析一下.Arm720:灵敏度的理论研究就到此为止吧,对于实际电路提高灵敏度的方式,另起一贴讨论吧.实践方面的挑战还是比较多的,也很有乐趣,虽然前期看了很多资料,但是分析起来还是感觉到力不从新啊.woshi622:Cmin=Eb/No+Rb(信息速率)-G(译码增益)+L(解扩损耗)-G/T-10LgKG/T为接收机品质因素,那份资料上没有写推导方法,大概是与天线和接收机有关Everyday:对于GPS的灵敏度,我想说明一下.现在业界SIRF算是GPS的老大,它的tracking灵敏度可以做到-159dBm.对应的C/No为13dB-Hz.在GPS中C/No用的很多.能介绍一下C/No与Eb/No之间的关系吗Arm720:手上没有C/N0表示系统灵敏度的资料,就连分析Eb/N0都找了很久,可能是我找的领域不对;射频的书籍是不会详细描述到Eb/N0和C/N0这一步,哪位朋友有这方面电子文档,如果方便,发一份到我邮箱里面吧,先谢过!SiRF芯片-159dBm的灵敏度确实高,但是不知是在多少误码率的情况下得到的他们的文档资料都是保密的,据我了解,SiRF芯片运动轨迹的漂移比较大,误码率高是主要原因吧,虽然有些地方能接受到信号,但是解码不稳定,导致静态漂移也大.我的分析不一定对,但是他的资料是绝对不开放的,很难进一步的了解他们的产品.Everyday:的确在LNA的设计中NF和Gain时相互矛盾的,但是在实际的应用中只要你选用的IC能够达到你的要求就OK了.例如:在GPS的LNA 设计时一般的要求时NF15dB.一般来说,你选用的管子或者片子都能达到这样的要求.在GPS实际的应用中,还要考虑功耗,layout面积,匹配是否方便,一致性问题等等.功耗是一个相当关键的指标,你设计的LNA除了NF,Gain 就是Ic了.比如现在我们设计的一款GPS LNA,达到了NF17dB,而工作电流为3mA(2.7V).S11,S22解码器--Et-->前向纠错(FEC)--Edec-->RS译码--Eb-->解码输出用户传输数据Es :单位符号能量 Et:单位比特信号能量Edec:输入RS译码器单位比特能量 Eb:用户速率单位比特能量从Eb/N0反推C/N的过程比较复杂,可以看出与具体的编解码算法相关.---转换过程很复杂,部分内容还需要在详细研究一下.Arm720:研究过程中的一个难点一直没有搞明白. 就是 C/N = Es/N0. 不知道这个是如何推导和计算出来的还有就是载波到底是调制前的还是调制后的在数字通讯中,为调制信号和载波信号相乘后输出,那么电路系统接收到的调制后(也就是相乘)的信号,包含载波和符号信号.根据付立叶变换,时域两信号相乘,在频域的表现两信号频域的卷积,频谱上的表现为 fc+fs, fc-fs ; 也就是接收信号不会出现载波信号,而是出现两个频率的信号.那位大侠能帮助解释一下 C 的详细含义,到底是载波还是信号(包含载波和符号), 以及 C/N 是如何与 Es/N0相等它的定义影响到功率和能量方面的分析. 多谢!Ayuyu:研究问题就要这股劲,我喜欢!这里我有些看法供你参考;1.基带信号经调制器后,载波信号会被抑制,在-25dBc到-50dBc之间,所以载波基本不影响信噪比的计算,这个调制信号通常是双边带信号.2.C/N and C/N0是卫星通信中常用术语,通常指的是信噪比和信号对噪声功率谱密度之比,由于数据经调制后输出的是速率为Rs调制符号,Es/N是解调器输出的信噪比,就是单位符号能量对噪声功率比,可以用矢量信号分析仪很容易测得,在DSP里也可以很容计算Es/N.如果Es/N来表示C/N=Rs×Es/N,这是我们工程上常说的信噪比;考虑N=N0×B就有C/N=Rs*Es/(N0*B),若取噪声带宽与信号的带宽相同,那么B=Rs,所以C/N=Es/N0.Arm720:非常感谢ayuyu兄的鼓励和帮助!我个人困惑的问题就在这儿:C/N=Rs*Es/(N0*B) = (Es/N0)*(Rs/B),就在Rs/B上面.拿GPS来说吧,载波频率为1.5742G,扩频带宽B为2.046M;此处的B就是2.046M,但是符号速率Rs是要小于2.046M的ayuyu:那是因为在基带调制器后有个基带成型滤波器(通常是升余弦一类的滤波器),使得信号占用频谱宽度加大,在这里衡量等效噪声带宽时通常取Rs同值checkz:公式的物理含义灵敏度的定义是在满足系统要求时(即Eb/N0)信号的最小电平.Eb/N0由基带部分的算法以及解调方式决定,所以对于特定的基带系统Eb/N0是一个定值.再看NF,它是由天线到基带接口中间所有的级联电路决定的,对于特定的电路当然也是定值,所以在以上两种条件都定下来的情况下,这个最小电平是由带宽决定的.这个公式有两个作用1.根据规范(规定了所需要的灵敏度,BW,Eb/N0比如GSM,灵敏度=-104dBm左右,BW=200Khz,Eb/N0=9dB)计算出射频接收前端所需要的NF然后根据这个指标选择不同的元器件进行接收链路的预算(linkbudget)2.根据实际的射频前端系统计算出灵敏度这和1是个相反的过程.例如GSM系统BW是200KS=-174dBm+10*log(BW)+Eb/N0+NF鄙人的一点粗见,不到之处敬请之处.Yshzhang:参照WCDMA的算法,这个真实一点WCDMA通信系统接收机(基站)灵敏度计算WCDMA作为第三代移动通信最重要的标准之一,其基站设备的性能直接关系到网络的覆盖和质量,射频带宽等于码片速率,即3.84MHz,对于速率为12.2kbit/s,QPSK调制信号,在Eb/No值为5dB时可以获得规定的误码率BER(0.1%).可以计算得到:KTBRF(dBm)=10log(1.381×10-23W/Hz/K×290K×3.84MHz×1000mW/W)=-108dBm.Gp(dB)=BRF/Rb=25dB于是,基站灵敏度:S(dBm)=NF-108+5-25=NF-128dB因此对给定的S=-121dB情况下,系统的噪声指数NF必须小于7dB.。
GPS信号功率,信噪比和系统灵敏度讨论Arm720:讨论这个议题的主要起因是:灵敏度(sensitivity)是如何确定的。
问题:我们经常看到某些GPS芯片厂商宣称自己的芯片灵敏度是如何的高,但是根据对整个系统的分析可以看出系统的灵敏度主要取决于第一级LNA的设计,GPS产品的灵敏度取决于GPS 芯片和放大器的设计,那么就带来下面的问题:1)系统的灵敏度是如何计算的?芯片的灵敏度对系统设计有什么影响?2)接收GPS信号的功率和信噪比是一个什么样的水平?3)如何按照信噪比,信号功率设计系统灵敏度?这真是一篇超精华的帖子!感谢楼主和参与的所有人!jinfoxhe:1 灵敏度的计算公式:S=-174dBm+10*log(BW)+Eb/N0+NF. BW一般为中频带宽,Eb/N0为芯片在一定误码的情况下解调需要的信噪比, NF为系统噪声系数。
如果是扩频系统,还需要减去扩频增益。
2 对于GSM来说,其灵敏度一般为-110dBm左右(基站),和具体的配置有关系。
从仿真来看,GSM的解调Eb/N0为4-5dB.3 见1。
snow99:好象在说GPS, 不是GSM, 虽然看起来很像GPS RF BW: 2.046 MHzModulation: BPSKProcess Gain: 46 dBThermal Noise Floor: kTB = -111 dBm/2.046MHzRequired Eb/N0: 6 dB (不太清楚, 可以修正)Receiver NF: 3 dB (Typical)Sensitivity: -111 + 6 + 3 - 46 = -148 dBm这只是一个大致结果, 考虑系统的其他算法以及Doppler校正, 最终灵敏度在-154 ~ -149之间Arm720:楼上朋友对灵敏度的描述已经非常清楚了,降低系统的信噪比和噪声系数能提高系统的灵敏度。
那么对于设计来说是不是可以这么理解:1)根据灵敏度公式估算系统的接收灵敏度 2)根据估算的系统接收灵敏度计算对芯片接收灵敏度的要求芯片接收的灵敏度反映了对前级放大器噪声系数和信噪比的设计要求。
接收灵敏度原理算法接收灵敏度是检验基站接收机接收微弱信号的能力,它是制约基站上行作用距离的决定性技术指标,也是RCR STD—28协议中,空中接口标准要求测试的技术指标之一。
合理地确定接收灵敏度直接地决定了大基站射频收发信机的性能及其可实现性.它是对CSL系统的接收系统总体性能的定量衡量。
接收灵敏度是指在确保误比特率(BER)不超过某一特定值的情况下,在用户终端天线端口测得的最小接收功率,这里BER通常取为0.01。
接收机的接收灵敏度可以用下列推导得出:根据噪声系数的定义,输入信噪比应为:(S/N)i=NF(S/N)o其中NF为噪声系数,输入噪声功率Ni=kTB。
当(S/N)o为满足误码率小于10—2时,即噪声门限,则输入信号的功率Si即为接收灵敏度:Si=kTBNFSYS(S/N)o (1)其中:k:波尔兹曼常数(1。
38×10—23 J/K);T:绝对温度(K);B:噪声带宽(Hz);NFSYS:收信机噪声系数;(S/N)o:噪声门限。
k、T为常数,故接收机灵敏度以对数形式表示,则有:Si=—174dBm+10lg B+ NFSYS+(S/N)o (2)举例来说,对于一个噪声系数为3dB的PHS系统,其带宽计为300KHz,如果系统灵敏度为—107dBm,则该系统的噪声门限为:(S/N)o=174-107-10lg(3×105)-3=9.2从以上公式可以看出为提高接收机灵敏度也即使Si小,可以从两个方面着手,一是降低系统噪声系数,另一个是使噪声门限尽可能的小.π/4DQPSK有三种解调方式:基带差分检测、中频差分检测、鉴频器检测。
可以证明[1]三种非相干解调方式是等价的,我们以基带差分检测为例进行分析。
在具有理想传输特性的稳态高斯信道,基带差分检测的误比特率曲线表示于图1实线[2]所示,由图可以查出在误比特率BER为0。
01时,噪声门限(S/N)o为6dB,对于上述例子来说,其噪声门限还有可以再开发的潜力.图1 π/4DQPSK的误比特率性能及频差Δf引起的相位漂移Δθ=2πΔfT对误比特率的影响对于基带差分检测来说,收发两端的频差Δf引起的相位的漂移Δθ=2πΔfT。
1GPS接收机的灵敏度定义随着GPS应用范围的不断扩展,业界对GPS接收机的灵敏度要求也越来越高,高灵敏度的接收性能可以令接收机在室内或其它卫星信号较弱的场景下仍然能够实现定位和跟踪,大大拓展了GPS的使用范围。
作为GPS接收机最为重要的性能指标之一,高灵敏度一直是各个GPS接收模块孜孜以求的目标。
对于GPS接收系统而言,灵敏度指标包括多个场景下的指标,分别为:跟踪灵敏度、捕获灵敏度、初始启动灵敏度。
目前业界已经可以实现跟踪灵敏度在-160dBm以下的接收机,同时,初始启动的灵敏度和捕获灵敏度也分别可以到达-142dBm和-148dBm以下。
GPS接收机首先需要完成对卫星信号的捕获,完成捕获所需要的最低信号强度为捕获灵敏度;在捕获之后能够维持对卫星信号跟踪所需要的最低信号强度为跟踪灵敏度。
为了实现定位,GPS接收机还需要解调GPS卫星发送的导航电文,相应的,解调导航电文所需要的最低信号强度为初始启动灵敏度。
根据上述定义可知,跟踪灵敏度最高,捕获灵敏度次之,初始启动灵敏度最差。
2GPS接收模块的灵敏度性能分析从系统级的观点来看,GPS接收机的灵敏度主要由两个方面决定:一是接收机前端整个信号通路的增益及噪声性能,二是基带局部的算法性能。
其中,接收机前端决定了接收信号到达基带局部时的信噪比,而基带算法则决定了解调、捕获、跟踪过程所能容忍的最小信噪比。
2.1接收机前端电路性能对灵敏度的影响GPS信号是从距地面20000km的LEO〔Low Earth Orbit,低轨道卫星〕卫星上发送到地面上来的,其L1频段〔fL1=1575.42MHz〕自由空间衰减为:按照GPS系统设计指标,L1频段的C/A码信号的发射EIRP〔Effective Isotropic RadiatedPower,有效通量密度〕为P=478.63W〔26.8dBw〕([1][2]),假设大气层衰减为A=2.0dB,则 GPS系统L1频段C/A码信号到达地面的强度为:GPS ICD〔Interface Control Document,接口控制文档〕文件〔[3]〕中给出的GPS系L1频段C/A码信号强度最小值为-160dBw,和上述结果一致。
GPS接收机的灵敏度分析
首先,灵敏度是指接收机在低信号强度情况下能够接收到的最小有效
信号强度。
通常以接收和解码导航信号的最低功率为衡量标准,以dBm或dB-Hz为单位进行表示。
接收机的灵敏度越高,就能在更弱的信号环境下
工作,提高了定位的可靠性和成功率。
接下来,影响GPS接收机灵敏度的因素主要有以下几个方面:
1.天线性能:GPS接收机的天线性能直接影响信号接收的效果。
天线
的增益、波束宽度和方向性等指标都会对接收机的灵敏度产生影响。
因此,选择合适的天线和调整其方向也是提高灵敏度的重要手段。
2.前端设计:前端设计主要包括低噪声放大器(LNA)的设计和功率
分配等。
LNA的噪声系数和增益直接影响了接收机的灵敏度。
较低的噪声
系数和合适的功率分配可以提高接收机的灵敏度。
3.中频放大器(IF)设计:IF放大器的设计和性能对于信号处理的
正确性和灵敏度也有着显著的影响。
合适的增益、线性度和频带宽度都是
提高灵敏度的重要因素。
4.数据处理算法:接收到的GPS信号需要经过一系列的解调、解码、
滤波等处理才能得到最终的定位结果。
因此,高效、精确的数据处理算法
也是提高灵敏度的重要因素。
除了影响因素,还有一些方法可以提高GPS接收机的灵敏度:
1.天线方面:选择合适的天线,并根据天线增益和方向性调整天线的
方向,以获得更好的信号接收效果。
2.前端设计:合理选择LNA的设计参数,以获得更低的噪声系数和更
高的增益。
优化功率分配,增强前端输入信号的有效性。
3.中频放大器设计:充分考虑IF放大器的设计参数,以保证其增益、线性度和频带宽度的一致性。
避免过度放大和失真。
4.数据处理算法:针对GPS信号处理进行优化,提高解调和解码算法
的性能,优化滤波和数据处理流程,从而提高定位的可靠性和精度。
综上所述,GPS接收机的灵敏度是衡量其接收能力的重要指标之一、
灵敏度的高低直接影响了接收机在低信号强度环境下的工作效果。
通过选
择合适的天线、优化前端和中频放大器的设计以及优化数据处理算法等方法,可以提高GPS接收机的灵敏度,提高定位的可靠性和精度。