第六章 非线性规划
- 格式:doc
- 大小:1.69 MB
- 文档页数:39
非线性规划什么是非线性规划?非线性规划(Nonlinear Programming,简称NLP)是一种数学优化方法,用于求解包含非线性约束条件的优化问题。
与线性规划不同,非线性规划中的目标函数和约束条件都可以是非线性的。
非线性规划的数学表达式一般来说,非线性规划可以表示为以下数学模型:minimize f(x)subject to g_i(x) <= 0, i = 1, 2, ..., mh_j(x) = 0, j = 1, 2, ..., px ∈ R^n其中,f(x)是目标函数,g_i(x)和h_j(x)分别是m个不等式约束和p个等式约束,x是优化变量,属于n维实数空间。
非线性规划的解法由于非线性规划问题比线性规划问题更为复杂,因此解决非线性规划问题的方法也更多样。
以下列举了几种常用的非线性规划求解方法:1. 数值方法数值方法是最常用的非线性规划求解方法之一。
它基于迭代的思想,通过不断优化目标函数的近似解来逼近问题的最优解。
常见的数值方法有梯度下降法、牛顿法、拟牛顿法等。
2. 优化软件优化软件是一类针对非线性规划问题开发的专用软件,它集成了各种求解算法和优化工具,可以方便地求解各种类型的非线性规划问题。
常见的优化软件有MATLAB、GAMS、AMPL等。
3. 线性化方法线性化方法是一种将非线性规划问题转化为等价的线性规划问题的求解方法。
它通过线性化目标函数和约束条件,将非线性规划问题转化为线性规划问题,然后利用线性规划的求解方法求解得到最优解。
4. 分类方法分类方法是一种将非线性规划问题分解为若干个子问题求解的方法。
它将原始的非线性规划问题分解为多个子问题,然后将每个子问题分别求解,并逐步逼近原始问题的最优解。
以上仅是非线性规划求解方法的一小部分,实际上还有很多其他的方法和技巧可供选择。
在实际应用中,选择合适的方法和工具是非常重要的。
非线性规划的应用非线性规划在实际生活和工程中有着广泛的应用。
97第六章* 非线性规划前面几章,我们论述了线性规划及其扩展问题,这些问题的约束条件和目标函数都是关于决策变量的一次函数。
虽然大量的实际问题可以简化为线性规划及其扩展问题来求解,但是还有相当多的问题很难用线性函数加以描述。
如果目标函数或约束条件中包含有非线性函数,就称这样的规划问题为非线性规划问题。
由于人们对实际问题解的精度要求越来越高,非线性规划自20世纪70年代以来得到了长足的发展;目前,已成为运筹学的一个重要分支,在管理科学、最优设计、系统控制等许多领域得到了广泛的应用。
一般来讲,非线性规划问题的求解要比线性规划问题的求解困难得多;而且也不象线性规划问题那样具有一种通用的求解方法(单纯形法)。
非线性规划没有能够适应所有问题的一般求解方法,各种方法都只能在其特定的范围内发挥作用。
本章在简要介绍非线性规划基本概念和一维搜索的基础上,重点介绍无约束极值问题和约束极值问题的求解方法。
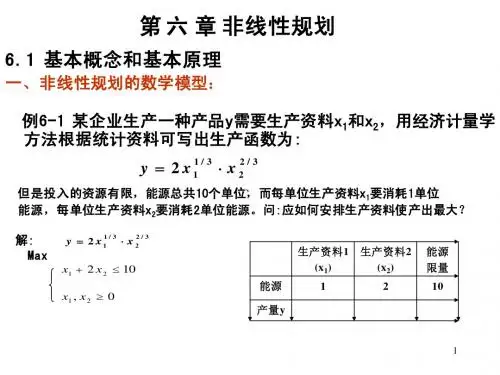
§1非线性规划的数学模型1.1 非线性规划问题[例6-1] 某商店经销A 、B 两种产品,售价分别为20和380元。
据统计,售出一件A 产品的平均时间为0.5小时,而售出一件B 产品的平均时间与其销售的数量成正比,表达式为n 2.01+。
若该商店总的营业时间为1000小时,试确定使其营业额最大的营业计划。
解:设1x 和2x 分别代表商店经销A 、B 两种产品的件数,于是有如下数学模型:2138020)(m ax x x x f +=10002.05.02221≤++x x x0,021≥≥x x98 [例6-2] 在层次分析(Analytic Hierarchy Process , 简记为 AHP )中,为了进行多属性的综合评价,需要确定每个属性的相对重要性,即它们各自的权重。
为此,将各属性进行两两比较可得如下判断矩阵:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=nn n n a a a a J 1111其中:ij a 是第i 个属性与第j 个属性的重要性之比。

第六章 非线性规划由前几章知道,线性规划的目标函数和约束条件都是其自变量的线性函数,如果目标函数或约束条件中包含有自变量的非线性函数,则这样的规划问题就属于非线性规划。
第一节 基本概念一、 非线性规划的数学模型非线性规划数学模型的一般形式是⎪⎩⎪⎨⎧=≥==),,2,1(0)(),,2,1(0)()(min l j x g m i x h x f ji (6.1)其中,X=(n χχχ,,,21 )T 是n 维欧氏空间E n 中的点(向量),目标函数)(X f 和约束函数)()(X j X i g h 、为X 的实函数。
有时,也将非线性规划的数学模型写成 ⎩⎨⎧=≥),,2,1(0)()(min l j X g X f j (6.2)即约束条件中不出现等式,如果有某一约束条件为等式0)(=X g j ,则可用如下两个不等式约束替代它: ⎩⎨⎧≥-≥0)(0)(X g X g jj模型(6.2)也常表示成另一种形式:{}⎩⎨⎧=≥=⊂∈),,2,1(,0)(|),(min l j X g X R E R X X f j n (6.3)上式中R 为问题的可行域。
若某个约束条件氏“≤”不等式的形式,只需用“-1”乘这个约束的两端,即可将其变成“≥”的形式。
此外,由于[])(m in )(m ax x f X f --=,且这两种情况下求出的最优解相同(如有最优解存在),故当需使目标函数极大化时,只需求其负函数极小化即可。
二、二维问题的图解当只有两个自变量时,求解非线性规划也可像对线性规划那样借助于图解法。
考虑非线性规划问题⎪⎪⎪⎩⎪⎪⎪⎨⎧≥≥≥-+=-+-+-=000505)1()2()(min 212122212221x x x x x x x x x X f (6.4)如对线性规划所作的那样,在21Ox x 坐标平面画出目标函数的等值线,它是以点(2.1)为圆心的同心圆,再根据约束条件画出可行域,它是抛物线段ABCD (图6-1)。
现分析当自变量再可行域内变化时目标函数值的变化情况。
令动点从A 出发沿抛物线ABCD 移动,当动点从A 移向B 时,目标函数值下降;当动点有B 移向C 时,目标函数值上升。
从而可知,在可行域AC 这一范围内,B 点的目标函数值)(B f 最小,因而点B 时一个极小点。
当动点由C 向D 移动时,目标函数值再次下降,在D点(其坐标为( 4.1))目标函数值最小。
在本例中,目标函数值)(B f 仅是目标函数)(X f 在一部分可行域上的极小值,而不是在整个可行域上的极小值,这样的极小值称为局部极小值(或相对极小值)。
像B 这样的点称为局部极小点(或相对极小点)。
)(D f 是整个可行域上的极小值,称全局极小值(最小值),或绝对极小值;像D 这样的点称全局极小值(最小点),或绝对极小点。
全局极小点当然也是局部极小点,但局部极小点不一定是全局极小点。
三、几个定义下面给出有关局部极小和全局极小的定义。
设)(x f 为定义在n 维欧氏空间n E 的某一区域R 上的n 元实函数(可记为)(X f :R 1E E n →⊂),对于R X ∈*,如果存在某个0>ε,使所有与X *的距离小于ε的X R ∈(即X R ∈且ε *XX -),都有)()(*X f X f ≥,则称X *为)(X f 在R 上的局部极小点, )(*X f 为局部极小值。
若对于所有X *X ≠且X *的距离小于ε的R X ∈,都有)()(*x f x f >,则称X *为)(X f 在R 上的严格局部极小点,)(*X f 为严格局部极小值。
设)(X f 为定义在n E 的某一区域R 上的n 元实函数,若存在R X ∈*,对所有X R ∈都有)()(*X f X f ≥,则称X *为)(X f 在R 上的全局极小点,)(*X f 为全局极小值。
若对于所有X R ∈且X *X ≠,都有)()(*x f x f >,则称X *为)(X f 在R 上的严格全局极小点,)(*X f 为严格全局极小值。
如将上述定义中的不等号反问,即可得到相应极大点和极大值的定义。
下面仅就极小点和极小值加以说明,而且主要研究局部极小值。
四、多元函数极值点存在的条件二阶可微的一元函数 极值点存在的条件如下:必要条件:0)('=x f充分条件:对于极小点:0)('=x f 且0)(">x f 对于极大点:0)('=x f 且0)("<x f对于无约束多元函数,其极值点存在的必要条件和充分条件,与一元函数极值点的相应条件类似。
1. 必要条件下述定理1给出了n 元实函数)(X f 在X *点取得极值的必要条件。
定理1 设R 是n 维欧氏空间n E 上的某一开集,)(X f 在R 上有连续一阶偏导数,且在点R X ∈*取得局部极值,则必有0)()()(*2*1*=∂∂==∂∂=∂∂nx X f x X f x X f (6.5)或写成0)(*=∇X f (6.6) 此处Tn x X f x X f x X f X f ⎪⎪⎭⎫ ⎝⎛∂∂∂∂∂∂=∇)(,,)(,)()(*2*1**(6.7)为函数)(X f 在X *点处的梯度。
这个定理是显然的。
像一元函数那样,称满足条件(6.5)的点为稳定点(驻点)。
函数)(X f 的梯度)(X f ∇有两个十分重要的性质:(1)函数)(X f 在某点)0(X的梯度)()0(X f ∇必与函数过该点的等值面(或等值线)正交(设)()0(X f ∇不为零);(2)梯度向量的方向是函数值(在该点处)增加最快的方向,而负梯度方向则是函数值(在该点处)减少最快的方向。
2. 二次型二次型是Tn x x x X ),,,(21 =的二次齐次函数:2223223222211211221112222)(nnn n n n n x a x x a x x a x a x x a x x a x a X f +++++++++= =AX X x x aT n i nj j i ij=∑∑==11(6.8)式中,ji ij a a =,A 为n n ⨯对称矩阵。
若A 的所有元素都是实数,则称上述二次型为实二次型。
一个二次型惟一对应一个对称矩阵A ;反之,一个对称矩阵A 也惟一确定一个二次型。
若对任意X 0≠(即X 的元素不全等于零),实二次型AX X X f T=)(总为正,则称该二次型是正定的。
若对任意X 0≠,实二次型AX X X f T=)(总为负,则称该二次型是负定的。
若对某些X 0≠,实二次型0)(>=AX X X f T;而对另一些X 0≠,实二次型0)(<=AX X X f T ,即它非正定,又非负定,则称它是不定的。
若对任意X 0≠,总有0)(≥=AX X X f T ,即对某些X 0≠,0)(>=AX X X f T ,对另外一些X 0≠,0)(==AX X X f T ,则称该实二次型半正定。
类似地,若对任意X 0≠,总有0)(≤=AX X X f T ,则称其为半负定。
如果实二次型X TAX 为正定、负定、不定、半正定或半负定,则称它的对称矩阵A 分别为正定负定、不定、半正定或半负定。
由线性代数学知道,实二次型X TAX 为正定的充要条件,是它的矩阵A 的左上角各阶主子式都大于零。
即,011>a 22211211a a a a >0,333231232221131211a a a a a a a a a >0,nnn na a a a 1111,>0实二次型X TAX 为负定的充要条件是,它的矩阵A 的左上角顺序各阶主子式负、正相间,即,011<a 22211211a a a a >0,333231232221131211a a a a a a a a a <0,nnn nn a a a a 1111)1(,->0 例1 判定以下矩阵的正定性:A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---402062225 B=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--031301110 解 对矩阵A :,0266225,052221121111>=--=<-=a a a a a,08042062225<-=---=A 故A 负定。
对矩阵B : ,10110,02221121111-===b b b b b故知B 不定。
3. 多元函数的泰勒(Taylor )公式 设n 元实函数)(X f 在)0(X 的某一邻域内有连续二阶偏导数,则可写出它在)0(X处的泰勒展开式如下:))(()(21)()()()()0(2)0()0()0()0(X X X f X X X X X f X f x f T T -∇-+-∇+= (6.9)其中,.10),()0()0(<<-+=θθX X X X若以X=X)0(+P 代入,则式(6.9)变为P X f P P X f X f P X f T T )(21)()()(2)0()0()0(∇+∇+=+ (6.10)其中,P XX θ+=)0(.也可将式(6.9)写成)())(()(21)()()()(2)0()0()0(2)0()0()0()0(X X X X X f X X XX Xf Xf X f T T-+-∇-+-∇+=ο (6.11) 其中,当)0(XX →时,⎪⎭⎫ ⎝⎛-2)0(XX ο是2)0(X X -的高阶无穷小,即0)(lim 2)0(2)0()0(=--→XX XX xx ο4. 充分条件*X 是)(X f 的极小点的充分条件由下面的定理2给出。
(定理2证明略) 定理2 设R 是n 维欧氏空间n E 上的某一开集,)(X f 在R 上具有连续二阶偏导数,若0)(*=∇X f ,且)(*2X f ∇正定,则R X ∈*为)(X f 的严格局部极小点。
此处)(*2X f ∇=2*22*21*22*222*212*21*221*221*2)()()()()()()()()(nn n n n x X f x X f x X f x x X f x X f x x X f x x X f x x X f x X f ∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂(6.11) 为)(X f 在点*X 处的黑塞(Hesse )矩阵。
若将)(*2X f ∇正定改为负定,定理2就变成了*X 为)(X f 的严格局部极大点的充分条件。
例2 研究函数2221)(x x X f -=是否存在极值点。
解 先由极值点存在的必要条件求出稳定点:112)(x x X f =∂∂ 222)(x x X f -=∂∂ 令0)(=∇X f ,即:021=x 和022=-x ,得稳定点 X=TTx x )0,0(),(21= 再用充分条件进行检验:2)(212=∂∂x X f 2)(222-=∂∂x X f 0)()(1222122=∂∂∂=∂∂∂x x X f x x X f 从而⎪⎪⎭⎫⎝⎛-=∇2002)(2X f 由于其黑塞矩阵)(2X f ∇不定,故TX )0,0(=不是极值点,而是一个鞍点。