认识刀库与机械手的结构
- 格式:ppt
- 大小:4.07 MB
- 文档页数:29

机械手的组成2009-4-29 来源:阅读:495次我要收藏工业机械手由执行机构、驱动机构和控制机构三部分组成。
1.执行机构(1)手部既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。
手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于吸冷的,光滑表面的零件或薄板零件)和电磁吸盘。
传力机构形式教多,常用的有:滑槽杠杆式、连杆杠杆式、斜槭杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式。
(2)腕部是连接手部和臂部的部件,并可用来调节被抓物体的方位,以扩大机械手的动作范围,并使机械手变的更灵巧,适应性更强。
手腕有独立的自由度。
有回转运动、上下摆动、左右摆动。
一般腕部设有回转运动再增加一个上下摆动即可满足工作要求,有些动作较为简单的专用机械手,为了简化结构,可以不设腕部,而直接用臂部运动驱动手部搬运工件。
目前,应用最为广泛的手腕回转运动机构为回转液压(气)缸,它的结构紧凑,灵巧但回转角度小(一般小于2700),并且要求严格密封,否则就难保证稳定的输出扭距。
因此在要求较大回转角的情况下,采用齿条传动或链轮以及轮系结构。
(3)臂部手臂部件是机械手的重要握持部件。
它的作用是支撑腕部和手部(包括工作或夹具),并带动他们做空间运动。
臂部运动的目的:把手部送到空间运动范围内任意一点。
如果改变手部的姿态(方位),则用腕部的自由度加以实现。
因此,一般来说臂部具有三个自由度才能满足基本要求,即手臂的伸缩、左右旋转、升降(或俯仰)运动。
手臂的各种运动通常用驱动机构(如液压缸或者气缸)和各种传动机构来实现,从臂部的受力情况分析,它在工作中既受腕部、手部和工件的静、动载荷,而且自身运动较为多,受力复杂。
因此,它的结构、工作范围、灵活性以及抓重大小和定位精度直接影响机械手的工作性能。
(4)行走机构有的工业机械手带有行走机构,我国的正处于仿真阶段。
2.驱动机构驱动机构是工业机械手的重要组成部分。
加工中心机床结构剖析及各部分功能实验一、实验目的(1)了解加工中心机床的基本组成、结构特点;(2)了解加工中心机床的各部分功能;(3)了解加工中心机床的基本运动;(4)了解加工中心机床的加工对象及其用途。
二、实验内容(1)介绍加工中心机床的特点及类型;(2)介绍加工中心机床的基本组成及其功能;(3)介绍加工中心机床的基本运动;(4)介绍加工中心机床的典型零件及加工范围。
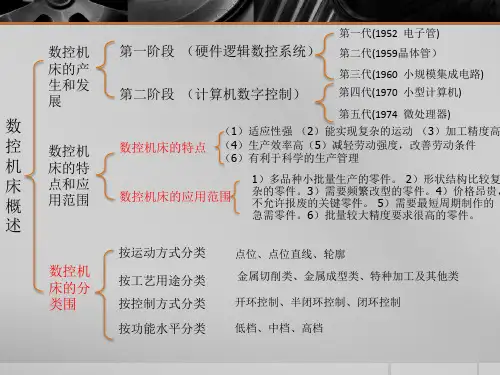
三、实验设备加工中心机床一台四、实验概述1. 加工中心机床的概述、组成与结构加工中心的种类繁多,按照机床形态一般可分为立式加工中心、卧式加工中心、龙门式加工中心和万能式加工中心;按照换刀的形式可分为带刀库、机械手的加工中心,无机械手的加工中心和回转刀架式加工中心。
对不同的机型,它们的操作面板和外形结构有所不同,但基本操作方法与原理相同。
本实验参考机床是日本牧野机床厂生产的立式加工中心FNC86-A,控制系统为FANUC16型,其结构和外形见图1-22。
图1-22 立式加工中心FNC86-A外形结构图2. 加工中心的组成、结构与各部件的功能立式加工中心是专门用于连续、高速、高精度加工的数控机床。
工件只需一次装夹即可完成多种工序的加工,如铣削加工、镗削加工、钻削加工和螺纹加工等。
立式加工中心主要由以下几部分组成:自动换刀装置(ATC)、床身、机床控制器(MTC)、主轴控制器(DSK)、液压系统、自动主轴温控器、数字控制器(CNC)等,如图1-22所示。
加工中心有各种类型,虽然外形结构各异,但总体上都是由以下几部分组成。
(1)基础部件。
基础部件由床身、立柱和工作台等大件组成,是加工中心结构中的基础部件。
这些大件有铸铁件,也有焊接的钢结构件,它们要承受加工中心的静载荷以及加工时的切削负载,因此必须具备更高的静、动刚度,也是加工中心质量和体积最大的部件。
工作台尺寸与外形如图1-23所示。
图1-23 工作台尺寸与外形(2)主轴部件。
主轴部件是由主轴箱、主轴电动机、主轴和主轴轴承等零件组成。
机械手的组成机械手是一种能够模拟人类手臂运动的机械装置,由多个组成部件构成。
这些组成部件相互协作,使机械手能够完成各种复杂的任务。
下面我们来详细介绍一下机械手的组成。
1. 机械手臂:机械手臂是机械手的核心部件,通常由多个关节连接而成。
每个关节都可以实现转动或者伸缩,从而使机械手臂能够在三维空间内完成各种运动。
机械手臂的长度和关节数量可以根据具体需求进行设计和调整,以适应不同的工作环境和任务。
2. 末端执行器:末端执行器是机械手的“手指”,用于具体操作物体。
常见的末端执行器有夹爪、吸盘、钳子等。
不同的末端执行器适用于不同的任务,例如夹爪适用于抓取物体,吸盘适用于吸附物体等。
3. 控制系统:控制系统是机械手的大脑,用于控制机械手的运动和执行任务。
控制系统通常由计算机、控制器和传感器等组成。
计算机负责处理和分析任务相关的数据,控制器负责发送指令控制机械手的运动,传感器负责感知周围环境和物体的位置、力量等信息,以便机械手能够做出准确的动作。
4. 传动系统:传动系统用于传递控制信号和能量,使机械手的各个部件能够协调运动。
传动系统通常由电机、减速器、传动带、链条等组成。
电机提供动力,减速器用于减小电机转速并增加扭矩,传动带和链条用于传递动力和运动。
5. 传感器:传感器是机械手感知和获取外界信息的重要组成部分。
常见的传感器包括光电传感器、力传感器、视觉传感器等。
光电传感器可以用于检测物体的存在和位置,力传感器可以用于测量机械手对物体施加的力量,视觉传感器可以用于识别物体和环境。
6. 控制算法:控制算法是机械手实现精确运动和执行任务的关键。
控制算法可以根据具体任务和环境进行设计和优化,以实现机械手的高效运动和准确操作。
以上是机械手的主要组成部分。
机械手的应用非常广泛,可以用于工业生产、医疗手术、物流仓储等领域。
随着科技的不断进步和创新,机械手的功能和性能也在不断提升,为人类带来了更多的便利和效益。
相信在未来,机械手将会发展成为更加智能和灵活的机器人助手,为人类创造更多的价值。
西南交通大学本科毕业设计(论文) 第 I 页本科毕业设计(论文)加工中心机械换刀手结构设计摘要机械手是自动换刀装置中交换刀具的主要工具,它担负着把刀库上的刀具送到主轴上,再把主轴上已用过的刀具返回刀库上的任务。
机械手的目的是为了使加工中心能够更快的的工作,使加工中心能够得到更加充分的利用,以实现其的价值所在;再者,由于使用了机械手,减少由于人工换刀带来的低生产效率和容易出事故的弊端。
加工中心的自动换刀装置,通常是由刀库和机械手组成,它是加工中心的象征。
因此各加工中心制造厂家都在下大力研制动作迅速、可靠性高的自动换刀装置,以求在激烈的竞争中取得好效益。
自动换刀装置是加工中心的核心内容,各厂家都在保密,极少公开有关资料,尤其机械手部分更是如此。
本次设计思路是利用机械手的运动来实现加工中心的换刀。
机械手的运动由三种运动组成即:旋转、升降和手爪的自锁。
机械手的旋转运动主要负责交换刀具,其驱动装置由两相互啮合的齿轮传动来实现,动力则由步进电机驱动提供,控制步进电机的每秒脉冲数,就可以准确的控制其位置。
机械手的升降运动主要负责拔刀、插刀,其驱动装置由齿轮齿条啮合把旋转运动变为直线运动,同样控制步进电机的每秒脉冲数和实现对三相中的任意一相一直保持通电以实现抱闸。
其手爪自锁主要利用电磁感应来实现,顶杆后面用弹簧连接用于在断电后能自由返回到原来的位置。
关键词:机械手;加工中心;电磁感应;刀具AbstractThe machine hand is the main tool in the install of automatic tool change,which shoulder carrying the knife onto the principal axis,then,put the have been used knife of the principal axis return to the tool. Purpose of the machine hand is in oder to making the central machining work more quickly and be used more fully.In other hand,using machine hand can improve the low produce efficiency and reducing the accident. The automatc tool change install of the central machining ,is usually composing of the machine hand and tool,which is the symbol of the central machining . So the central machining maker study the automatic tool change on the quickly move and good reliability .Vigorously, in oder to gain huge benefit in the intense competition market.The automatic tool change is the core content to the central machining, so allthe maker are all keeping secret and do not open,especially the machine hand.In my graduation design,the main thinking is using the machine hand to complete exchanging the knife.movement of the machine hand is make up by three kind movement.The whirling of the machine hand is in charge of exchanging the knife。
盘式刀库机构分析1盘式刀库机构组成盘式刀库机构主要由动力传动装置,刀盘,机械手等主要部件组成。
1.1动力传动装置主要由交流伺服电机经过减速机构,带动齿圈,使之与齿圈通过螺栓连结的12个工位刀盘旋转。
可以通过数控系统对电机进行控制,实现需要的转速。
1.2刀盘设计刀盘通过螺栓与齿圈连接固定,由刀库的传动装置驱动齿圈,带动刀盘旋转,实现自动换刀过程的选刀和定位。
刀盘有12个工位,每个工位安装一组2个刀夹定位块,每组定位块上均可放置所需的刀夹,刀具。
1.3机械手设计机械手由机械手臂和手指2部分组成。
机械手臂在液压的控制下带动机械手指进行工作。
推拉油缸右端的送刀进油口来油时,推动活塞带动机械手手臂将刀架所需更换的刀夹从刀库中送出,此时左端的取刀进油口回油。
同时,液压油经导向杆内的油孔作用于机械手手臂的小活塞上,推动手指钩,完成勾住刀夹的动作。
推拉油缸左端的取刀进油口来油时,推动活塞带动机械手臂将刀架不需要的刀夹取回刀库,此时右端的送刀进油口回油。
2工作原理盘式刀库的工作主要由机械手臂的3个位置(1.机械手臂在刀盘旋转的时候的位置;2.从刀盘取刀到将刀具送回刀盘的位置;3.将刀具从车床上取出及将刀具送到车床的位置)和机械手指的放松和夹紧2种状态来实现的。
机械手臂的定位通过位置判断开关来实现,通过无触点式接近开关来控制机械手臂的移动。
换刀过程开关包括机械手初始位置判断开关,取刀到位判断开关,送刀到位判断开关3部分,选用无触点式接近开关。
3个开关通过调整用安装支架固定在刀库连接板上,因结构需要,共用1个感应块,感应块分3个感应区域,每个区域对应1个开关。
在结构上,把3个开关固定在与机身相连的滑轨上,以螺栓连接固定。
需要调整时只需将螺栓松开将开关在滑轨上移动后再固定就可以实现初始位置,取刀位置和送刀位置的调整。
而且在取,送刀的过程中直接利用无触点式接近开关直接发出信号,配合反应迅速的液压系统,可以实现取,送刀动作在控制上的精确执行,完成整个换刀过程。
机械手的简单构成机械手主要由执行机构、驱动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数。
自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
一般专用机械手有2~3个自由度。
控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。
同时接收传感器反馈的信息,形成稳定的闭环控制。
控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
机械手的执行机构分为手部、手臂、躯干;1、手部手部安装在手臂的前端。
手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。
手指的数量又可分为二指、三指、四指等,其中以二指用的最多。
可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。
所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。
为了使机械手能够正确地工作,手臂的3个自由度都要精确地定位。
3、躯干躯干是安装手臂、动力源和各种执行机构的支架。
机械手所用的驱动机构主要有4种:液压驱动、气压驱动、电气驱动和机械驱动。
其中以液压驱动、气压驱动用得最多。
1、液压驱动式液压驱动式机械手通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械手执行机构进行工作。
通常它的具有很大的抓举能力(高达几百千克以上),其特点是结构紧凑、动作平稳、耐冲击、耐震动、防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。
主轴部件结构图7815型数控车床主轴部件结构图32型数控铣床主轴部件结构图THK6380加工中心主轴部件结构图主轴准停装置原理图进给传动部件结构图坐标轴进给传动系统结构布置形式电动机与丝杠直联式步进电动机与丝杠的联接向整法圆柱薄片齿轮周向弹簧错齿调整法简图圆柱薄片齿轮可调拉簧错齿调整法简图斜齿轮垫片、压簧调整锥齿轮弹簧调整法齿轮齿条啮合齿侧隙消除法结构简图滚珠丝杠结构螺纹滚道的结构形式简图垫片调整式的滚珠丝杠螺母副纹调整式的滚丝杠螺母副齿差调整式的滚珠丝杠螺母副导轨部件结构图直线滚动导轨副结构滚动导轨预加负载的方法直线滚动导轨副的固定滚动导轨块理轨理工作台部件结构图多齿盘分度工作台结构图带交换托盘的多齿盘分度工作台数控分度工作台加工中心回转工作台工作台夹紧构夹紧环联轴器结构图刀架和机械手部件结构图立式四方刀架结构回转刀架刀库种类链式刀库换刀位置各种链式刀库单臂单手式机械手手臂和手爪结构加工中心自动换刀装置向与向滑台回转立柱与机械手回转运动机械手臂结构图换刀装置各部分位置关系图检测装置结构图直线感应同步器结构。