差速转向的农用自动引导小车控制系统设计_尚婕
- 格式:pdf
- 大小:355.34 KB
- 文档页数:4

1 绪论1.1 AGV自动引导小车简介AGV(Automatic Guided Vehicle),即自动引导车,是一种物料搬运设备,是能在某位置自动进行货物的装载,自动行走到另一位置,自动完成货物的卸载的全自动运输装置。
AGV是以电池为动力源的一种自动操纵的工业车辆。
装卸搬运是物流的功能要素之一,在物流系统中发生的频率很高,占据物流费用的重要部分。
因此,运输工具得到了很大的发展,其中AGV的使用场合最广泛,发展十分迅速。
1.2 自动引导小车的分类自动引导小车分为有轨和无轨两种。
所谓有轨是指有地面或空间的机械式导向轨道。
地面有轨小车结构牢固,承载力大,造价低廉,技术成熟,可靠性好,定位精度高。
地面有轨小车多采用直线或环线双向运行,广泛应用于中小规模的箱体类工件FMS中。
高架有轨小车(空间导轨)相对于地面有轨小车,车间利用率高,结构紧凑,速度高,有利于把人和输送装置的活动范围分开,安全性好,但承载力小。
高架有轨小车较多地用于回转体工件或刀具的输送,以及有人工介入的工件安装和产品装配的输送系统中。
有轨小车由于需要机械式导轨,其系统的变更性、扩展性和灵活性不够理想。
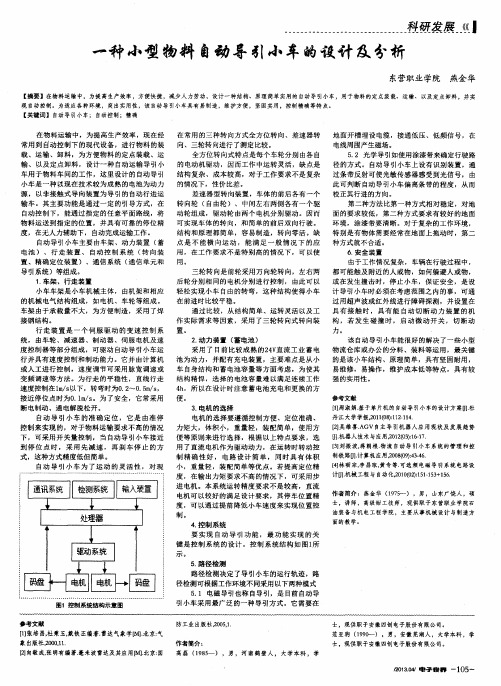
无轨小车是一种利用微机控制的,能按照一定的程序自动沿规定的引导路径行驶,并具有停车选择装置、安全保护装置以及各种移载装置的输送小车。
无轨小车按照引导方式和控制方法的分为有径引导方式和无径引导自主导向方式。
有径引导是指在地面上铺设导线、磁带或反光带制定小车的路径,小车通过电磁信号或光信号检测出自己的所在位置,通过自动修正而保证沿指定路径行驶。
无径引导自主导向方式中,地图导向方式是在无轨小车的计算机中预存距离表(地图),通过与测距法所得的方位信息比较,小车自动算出从某一参考点出发到目的点的行驶方向。
这种引导方式非常灵活,但精度低。
1.3 国内外研究现状及发展趋势AGV是伴随着柔性加工系统、柔性装配系统、计算机集成制造系统、自动化立体仓库而产生并发展起来的。

![一种差速驱动机构及自动引导车[实用新型专利]](https://img.taocdn.com/s1/m/26071d8f27d3240c8547ef58.png)
专利名称:一种差速驱动机构及自动引导车专利类型:实用新型专利
发明人:张金亮
申请号:CN201721380681.4
申请日:20171023
公开号:CN207473408U
公开日:
20180608
专利内容由知识产权出版社提供
摘要:本实用新型公开一种差速驱动机构,所述差速驱动机构包括驱动装置、支承装置,以及用于与车体固定的固定法兰盘,所述支承装置包括旋转组件,所述旋转组件可相对固定法兰盘转动,所述旋转组件上固定设有摩擦轮,所述摩擦轮的外侧表面与所述固定法兰盘的外侧表面相接触,所述摩擦轮上连接设有检测舵角的传感器,通过在旋转部件上增加一个与固定法兰盘相配合的摩擦轮,采用摩擦副传递动作,能够有效的检测差速驱动的舵角,对安装有差速驱动机构的AVG进行实时的纠正行驶路线;而且由于结构简单可靠,可方便直接对现有的差速驱动机构进行改进。
申请人:深圳市佳顺智能机器人股份有限公司
地址:518000 广东省深圳市龙华新区观澜大和社区大和村596号-7怡力科技园厂房C栋3-4层国籍:CN
代理机构:深圳市启明专利代理事务所(普通合伙)
代理人:张信宽
更多信息请下载全文后查看。
007求知导刊Journal of Seeking Knowledge Guide前沿QianYan2018年9月Sept.2018作者简介:康迎曦(1977—),女,讲师,硕士,研究方向:图像处理、电工电子。
自动引导小车的设计一、引言物料运输是一项繁重复杂的工作,传统的物料运输方式是由人工操作,不仅浪费人力资源,而且危险系数高。
自动引导小车,简称AGV (Automated Guided Vehicle),装备有自动引导装置,作为新兴的物料运输方式,现场无需人工操控即可完成搬运、避障、装载等工作。
自动导引车系统(AGVS)集传感器、信号处理、自动控制、图像处理等多种技术于一体,是现代物流系统中的关键设备。
随着科学技术的发展,物流技术在制造业、第三方物流、电子商务等方面迅速发展,AGV 在缩短生产周期和提高经济效益等方面都有着显著的作用,因此得到了越来越广泛的应用[1]。
二、自动引导小车的发展历史及现状1953年,美国Barrett Electric 公司制造了世界上第1台采用埋线电磁感应方式跟踪路径的自动导向车,也被称作“无人驾驶牵引车”。
到了 20世纪70年代中期,具有载货功能的AGV 在欧洲得到了应用并被引入到美国。
这些自动导向车主要用于自动化仓储系统和柔性装配系统的物料运输。
在20世纪70年代和20世纪80年代初,AGV 的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发[2]。
20世纪80年代中期,57%的AGV 用于汽车制造业。
另外,根据对国外公司物料搬运系统装备类型的统计,采用自动导向车、有轨搬运车、起重机、辊子输送机、悬挂运输机的比例分别占41%、29%、9%、10%和11%。
AGV 在我国的研究及应用起步较晚。
20世纪70年代后期,北京起重运输机械研究所研制了三轮式AGV。
20世纪80年代后期,北京机械工业自动化研究所为二汽研制了应用在立体化仓库中的AGV,沈阳自动化研究所为金杯汽车公司研制了汽车发动机装配专用AGV。
本科毕业论文(设计)论文(设计)题目:自动引导小车结构及控制系统设计学院:__机械工程专业:机械设计制造及其自动化_班级:_______学号:____学生姓名:______指导教师:____2012年6月5日诚信责任书本人郑重声明:本人所呈交的本科毕业论文(设计),是在导师的指导下独立进行研究所完成。
毕业论文(设计)中凡引用他人已经发表或未发表的成果、数据、观点等,均已明确注明出处。
特此声明。
论文(设计)作者签名:日期:2012.06.05目录摘要 ........................................................................................................................................ I V ABSTRACT .. (V)第一章绪论 (1)1.1 AGV小车简介 (1)1.2 国内外AGV的发展概况 (2)1.3 AGV自动引导车的发展趋势 (3)1.4 自动引导车的关键技术 (3)1.4.1 传感技术 (4)1.4.2 导引跟踪与定位技术 (4)1.4.3路径规划 (5)1.4.4 智能控制技术 (5)第二章系统的总体方案 (6)2.1 国内常见的几款AGV特点及其设计方案的分析 (6)2.1.1 电磁感应引导式AGV (6)2.1.2激光引导式AGV (6)2.1.3视觉引导式AGV (7)2.1.4 惯性导引式AGV (7)2.1.5光学控制带导引式AGV (7)2.1.6 GPS导引式AGV (8)2.2 本设计的基本思路 (8)2.2.1 硬件部分 (8)2.2.2 机械部分 (9)第三章自动导引小车的硬件设计 (10)3.1 硬件系统整体介绍 (10)3.2 硬件的选型原则 (10)3.3 单片机及其扩展 (11)3.3.1 AT89C51主控芯片 (11)3.3.2 程序存储器的扩展 (13)3.3.3 数据存储器的扩展 (16)3.3.4 并行I/O接口电路的扩展 (17)3.3.5译码电路设计 (19)3.3.6 AT89C51的时钟电路 (20)3.3.7 复位电路 (21)3.4 PWM信号发生电路设计 (21)3.4.1 PWM的基本原理 (21)3.4.2 PWM信号发生电路设计 (22)3.4.3 PWM发生电路主要芯片的工作原理 (23)3.5 电机驱动单元 (24)3.6 传感器单元 (26)3.7 电源管理单元 (27)3.8 操作及显示单元 (29)第四章自动引导小车的机械设计 (31)4.1 常用自动导引车的运动机构分析 (31)4.1.1 三轮结构 (32)4.1.2 四轮结构 (32)4.2 自动导引小车轮系结构的设计 (33)4.3 自动引导小车的技术指标 (34)4.3.1 小车的行驶阻力的计算 (34)4.3.2 电机的选择 (35)4.3.3 确定小车的驱动轮直径 (36)4.3.4 确定的小车的最小转弯半径 (36)4.4 整车的机械设计 (36)4.5 小车的轨迹规划 (38)第五章总结 (39)参考文献 (40)致谢 (41)自动引导小车结构及控制系统设计摘要自动导引小车是一种无人操纵的物料搬运设备,是自动化工厂重要的运输工具之一。
最优控制论文姓名:郭满学号: 2专业:控制理论与控制工程基于视觉的自动导引车两轮差速转向LQR控制器研究与设计冯冬青1,郭满2(1 郑州大学电气工程学院自动化系2 郑州大学电气工程学院自动化系)摘要:本文主要研究基于视觉的自动导引车的转向控制系统,首先简要地介绍了基于机器视觉导向的AGV 两轮差速转向的原理和组成,建立系统模型。
进而提出了LQR最优控制方法对两轮差速转向进行控制,最后讨论了Q,R矩阵选择对控制性能的影响。
仿真和实验结果表明,采用LQR对两轮差速转向进行控制,样车运行过程稳定,路径跟踪可靠,控制性能良好。
关键字:自动导引车,差速转向控制,LQR控制器,Q,R矩阵选择Research and design of LQR controllor for visual-based AGVtwo rounds differential steeringDongqing Feng1Man Guo2(1 Department of Electrical Engineering,Zhengzhou University,Zhengzhou City,China2 Department of Electrical Engineering,Zhengzhou University,Zhengzhou City,China)Abstract:The paper mainly studies the steering control system of visual-based Automatic Guided Vehicles(AGV).Firstly,we give a brief introduction to principle of steering control and create its model.Then,we proprosed an agrithm based on LQR optimal control theory.At last,the effect of matrice Q,R is discussed.Simulation results show that LQR control of two differential steering pocesses a good performance.Key words:AGV, steering control,LQR controllor, the choose of Q and R.0 引言国内外一直在寻求机械化和智能化的搬运技术和装备,以降低搬运成本,提高物料搬运效率,自动搬运越来越受到关注。
专利名称:磁导航差速驱动小车控制系统专利类型:实用新型专利
发明人:曹佳辉,曾鹏,徐嘉益,张毫杰
申请号:CN202020351747.2
申请日:20200319
公开号:CN211786760U
公开日:
20201027
专利内容由知识产权出版社提供
摘要:磁导航差速驱动小车控制系统,包括主控单元,主控单元与磁传感器连接,用于将识别到的路面磁条信息发送给主控单元;主控单元与电机驱动器连接,通过电机驱动器来控制驱动电机带动小车运行;主控单元通过网络通讯模块与上位机连接,接受上位机的信息;主控单元通过USB接口模块与外部设备连接,与外部设备进行通讯;主控单元与超声波传感器连接,超声波传感器检测小车行驶路径上的障碍信息;主控单元与RFID射频识别模块连接,读取地面上设置的RFID卡,实现特定工位停车;主控单元经过继电器与安全触边连接,发生碰撞时及时停车;电源模块为系统中的用电模块供电。
本实用新型具有维护方便、成本低、结构可靠的特点,适合二次开发。
申请人:浙江工业大学
地址:310014 浙江省杭州市下城区潮王路18号
国籍:CN
代理机构:杭州天正专利事务所有限公司
更多信息请下载全文后查看。
智能自动引导小车模型系统设计
唐秀东;刘丽婧;王虹飞
【期刊名称】《机电工程技术》
【年(卷),期】2007(036)009
【摘要】本文设计了一台磁制导式的自动引导小车(Automatic Guided Vehicle,简称AGV)模型,此模型实现了自动充电、智能引导、人体识别、语音播报及与上位机无线通讯等功能,这些功能在一定的程度上体现了时代对自动引导小车的要求,具有一定的参考意义.文中主要在模型的数字控制和硬件设计方面进行了介绍,给出了主要的硬件电路图,并以此模型为依据对智能自动引导小车的设计做了一些探讨.【总页数】4页(P77-79,107)
【作者】唐秀东;刘丽婧;王虹飞
【作者单位】华中科技大学电工与电子科技创新中心,湖北武汉,430074;华中科技大学电工与电子科技创新中心,湖北武汉,430074;华中科技大学电工与电子科技创新中心,湖北武汉,430074
【正文语种】中文
【中图分类】TP273
【相关文献】
1.差速转向的农用自动引导小车控制系统设计 [J], 尚婕;姜文刚;蔡蓝图
2.基于STM32单片机的自动引导小车控制系统设计 [J], 何腾鹏;黄峰;谭方韬;徐建
3.基于微型电脑智能小车的自动驾驶系统设计 [J], 杨义涛;茅洁;罗媛;于淼
4.基于单片机技术的自动循迹避障寻光智能小车系统设计 [J], 申扣明;杨国平
5.基于图像引导的自动导引小车系统设计 [J], 陈超;叶庆泰
因版权原因,仅展示原文概要,查看原文内容请购买。
差速转向农业专用 AGV 小车的设计与模糊控制研究赵晨宇;陈息坤【摘要】农业专用自动导引小车( AGV )作为农业作业的通用运载平台,是针对具体应用环境而设计的特定用途机器人,已成为农业自动化的一个重要发展方向。
为此,介绍了一种基于多轴运动控制器的现代农业自动化AGV小车。
同时,针对差速转向驱动型AGV小车路径跟随问题,首先对该AGV系统进行了理论分析和运动学建模;然后应用模糊控制理论,设计了以距离偏差和角度偏差为输入、左右驱动轮速度差为输出的模糊控制器;最后,在MatLab/Simulink 环境中进行仿真验证。
仿真结果表明:设计的模糊控制器在直线和圆周路径上跟踪性能明显优于常规PID控制器,其有效性和可行性得到了验证。
%As a common platform for agricultural operations , agricultural automatic guided vehicle ( AGV ) is a kind of robot that is particularly designed for specific application environment .It is becoming more and more important in agricul-tural automatic .An AGV used in automation of modern agriculture based on multi axis motion controller is proposed .Ai-ming at AGV path following problem ,a kinematic model of the AGV is established and analyzed .Thena fuzzy controller with distance deviation and angle deviation as inputs , difference of left and right wheel ’ s speed as output is designed , based on fuzzy control theory .Finally , the control system is simulated in the simulink module of the Matlab platform . The results indicated that the system follows in the linear and circular path on a clear advantage than the conventional PID control system .Its effectiveness and feasibility has been verified .【期刊名称】《农机化研究》【年(卷),期】2016(000)011【总页数】5页(P123-127)【关键词】农业专用AGV;差速转向;多轴运动控制器;模糊控制;轨迹跟踪【作者】赵晨宇;陈息坤【作者单位】上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072【正文语种】中文【中图分类】S24自动导引小车(Automated Guided Vehicle, AGV),是指配备有自动导引装置的移载运输小车,以控制器为核心,以蓄电池为动力,能按预先规划好的路径安全、自主行驶,并完成指定运输动作的无人驾驶自动化搬运车辆[1]。