03
机动示意图-不按比例绘制的简图 现摘录了部分GB4460-84机构示意图如下表。
04
作为运动分析和动力分析的依据。
1-2 平面机构运动简图
常用机构运动简图符号
圆锥齿轮传动
齿轮齿条传动
在机架上的电机
带传动
外啮合圆柱齿轮传动
圆柱蜗杆蜗轮传动
链传动
凸轮传动
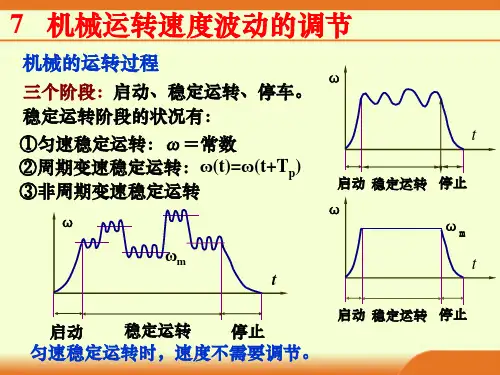
机构运动简图应满足的条件: 1.构件数目与实际相同
内燃机连杆
套筒
连杆体
螺栓
垫圈
螺母
轴瓦
连杆盖
零件 -独立的制造单元
2.运动副
a)两个构件、b) 直接接触、c) 有相对运动
运动副元素-直接接触的部分(点、线、面) 例如:凸轮、齿轮齿廓、活塞与缸套等。
定义:运动副--两个构件直接接触组成的仍能产生某些相对运动的联接。
三个条件,缺一不可
运动副的分类: 1)按引入的约束数分有:
解:n=
01
4,
02
PH=0
03
E
04
C
05
虚约束 -对机构的运动实际不起作用的约束。 计算自由度时应去掉虚约束。
∵ FE=AB =CD ,故增加构件4前后E点的轨迹都是圆弧,。 增加的约束不起作用,应去掉构件4。
F=3n - 2PL - PH =3×4 -2×6 =0
A
F
重新计算:n=3, PL=4, PH=0
2
3
②计算五杆铰链机构的自由度
解:活动构件数n=
4
低副数PL=
5
F=3n - 2PL - PH =3×4 - 2×5 =2
高副数PH=
0
1
2
3




![机械设计基础-(第五版)讲义2[35P][0.99MB]](https://uimg.taocdn.com/51eb4883680203d8ce2f2413.webp)
![机械设计基础(第五版)讲义03[30P][870KB]](https://uimg.taocdn.com/f10a3cf3aef8941ea76e0513.webp)