主动减振系统的数学建模与仿真分析
- 格式:pdf
- 大小:261.36 KB
- 文档页数:5
微型电动汽车主动悬架系统振动控制仿真随着环境保护意识的增强和能源危机的出现,微型电动汽车逐渐成为人们关注的焦点。
然而,由于其车身结构相对较轻、电动机的振动和噪声问题以及减震器的限制等因素,微型电动汽车在行驶过程中往往会面临一定的振动与安全性问题。
为了解决这一问题,主动悬架系统作为一种有效的控制手段被广泛应用。
本文将就微型电动汽车主动悬架系统振动控制进行仿真分析。
1. 引言微型电动汽车作为一种新兴的交通工具,具有环保、节能等显著优势。
然而,其车身结构相对较轻,使得在行驶过程中容易受到外部因素的影响,出现较大的振动和不稳定性。
为了提高微型电动汽车的乘坐舒适性和行驶稳定性,减少振动噪声,主动悬架系统应运而生。
2. 主动悬架系统的原理主动悬架系统通过采集汽车各部位的运动参数,对悬架系统进行实时调整,从而实现对汽车振动的主动控制。
其主要原理包括传感器感知、控制器分析和执行机构动作三个部分。
首先,传感器感知微型电动汽车在行驶中的振动状态。
常用的传感器包括加速度计、倾角传感器、车速传感器等。
然后,控制器根据传感器所采集的数据对振动进行分析,并根据预设参数进行控制策略的制定。
常见的控制策略包括PID控制、H∞控制等。
最后,主动悬架系统的执行机构根据控制器的指令,对悬架系统进行相应的调整,以抑制或消除振动。
3. 模型建立与参数优化为了进行主动悬架系统的振动控制仿真分析,需要建立相应的模型并对参数进行优化。
首先,需要建立微型电动汽车的运动学模型和动力学模型,包括车身质量、弹簧刚度、减震器阻尼等参数。
通过对实验测试数据的分析和对现有模型的改进,确定合适的参数。
然后,根据实际工况和振动特征,选择合适的控制策略。
可以采用MATLAB等仿真软件对各控制策略进行仿真分析,比较其性能和适用性。
最后,根据仿真分析结果,对主动悬架系统的参数进行优化,以实现更好的振动控制效果。
优化方法可以采用遗传算法、粒子群算法等。
4. 实例仿真结果与讨论为了验证主动悬架系统的效果,本文进行了一系列的仿真实验,并对实验结果进行了详细的分析与讨论。
具有极点约束的海洋平台的主动减振控制方法及仿真王媛【摘要】本文主要研究海洋平台振动控制系统具有极点约束的状态反馈镇定问题.首先将海洋平台系统进行量化分析,抽象成数学模型,并给出符号标记和定义.其次采用极点配置方法将闭环系统的极点配置在复平面上适当区域,通过改善系统的动态和稳态特性,从而提高海洋平台振动控制系统的性能.基于此,主动控制律的设计问题最终被化为线性矩阵不等式的求解问题.最后,通过改变参数对系统性能进行仿真模拟,仿真结果表明了方法的有效性.【期刊名称】《价值工程》【年(卷),期】2017(000)012【总页数】3页(P202-204)【关键词】海洋平台;主动控制;极点配置;减振【作者】王媛【作者单位】昆明理工大学管理与经济学院,昆明650093【正文语种】中文【中图分类】TP13海洋平台是指在海上进行钻井、采油、集运、施工等活动提供生产和生活设施的构筑物。
随着经济发展和社会进步,近三十年来,人们对海洋的探索和挖掘越来越深入,海岸和近海建筑工程建设也越来越受到人们的关注。
海洋平台结构复杂,价格高,且经常会遭受到风、潮汐、地震等作用的损害。
海洋平台一旦出现事故,生命和财产损失难以估量。
因此为了维持海洋平台系统的可靠性和安全性,有效地减少风浪、地震、海啸等外部扰动对平台造成的影响,保护平台上工作人员的安全,加强和完善海洋平台的减振控制十分关键。
国内外专家学者对控制系统的研究已取得一定进展,许多控制装置和控制手段,如被动控制,主动控制,以及半主动装置都已经被应用于减振控制。
举例来说,Patil和Jangid[1]通过海上平台设备反应的能量损耗,如在海浪作用下的弹簧和摩擦阻尼器,研究了在波浪力影响下已经安装了摩擦减振器等能耗装置的海洋平台的响应。
Golafshani和Gholizad[2]研究摩擦阻尼器的性能,防止波浪振动导致海洋平台的振动。
滑模方法提供了很好的鲁棒性和不变性系统扰动特性(Vtkin,1977)[3],基于一个简单的线性变换,可以将滑模方法及最优控制方法相结合,提出一个最优滑动模式控制器,并采用规定的衰变率得到滑模方法及最优控制方法。
高速列车减振机构的设计与仿真近年来,高速列车的出行已经成为人们生活中非常重要的一部分。
高速列车的快速运行给人们带来了便利,但同时也带来了很多振动和噪音问题。
因此,设计和仿真一种有效的减振机构,能够大大提高高速列车的运行稳定性和乘坐舒适度。
一、高速列车振动问题的研究高速列车在高速运行过程中,会受到路轨不平、风压、空气动力等多种因素的影响,从而产生振动。
这些振动不仅会影响列车的运行稳定性,还会对车内乘客的舒适度产生重要影响。
因此,减振机构的设计成为了高速列车研究的重要课题之一。
二、减振机构的设计原理减振机构的设计主要通过改变列车的振动特性,达到减少车体振动的目的。
常见的减振机构包括弹簧减振器、液体减振器、液体弹簧减振器等。
这些减振机构通过吸收和分散车体的振动能量,从而减轻列车的振动。
三、减振机构的仿真方法在减振机构的设计过程中,仿真是一种非常重要的方法。
通过仿真,可以模拟车体在实际运行过程中的振动情况,从而评估减振机构的设计效果。
常用的减振机构仿真软件有Ansys、ADAMS等,通过这些软件可以对减振机构进行各种参数的优化,进一步提高减振机构的效果。
四、应用实例:中国高速列车的减振机构设计中国高速列车作为世界上最大和最快的高速铁路网络,其减振机构设计也是全球研究的重点之一。
例如,中国的CRH380A型高速列车在设计过程中,采用了多种减振机构,包括弹簧减振器、液体减振器等。
通过对这些减振机构进行仿真和实验,CRH380A型高速列车的振动和噪音问题得到了有效的解决,提高了列车的运行稳定性和乘坐舒适度。
五、未来的发展方向随着科技的不断进步和人们对高速列车乘坐舒适度的要求越来越高,减振机构的设计也在不断发展。
未来,减振机构的设计将更加注重减少列车的振动和噪音,并提高列车的运行效率。
同时,新材料和新技术的应用也将为减振机构的设计带来更大的突破。
六、结语设计和仿真高速列车减振机构是提高列车运行稳定性和乘坐舒适度的重要手段。
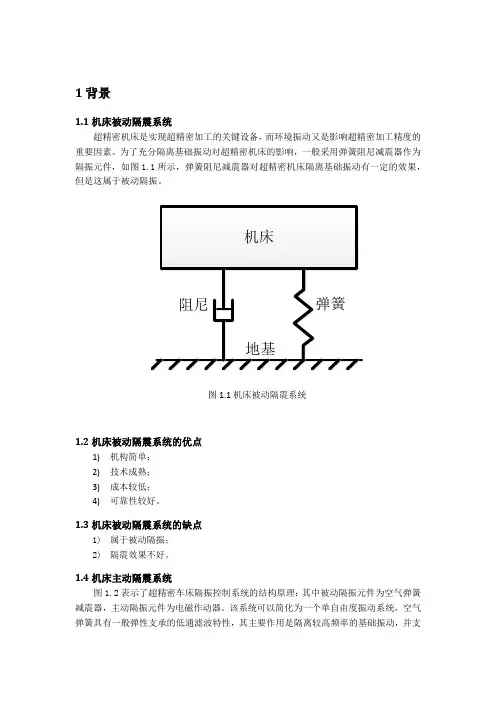
1背景1.1机床被动隔震系统超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,一般采用弹簧阻尼减震器作为隔振元件,如图1.1所示,弹簧阻尼减震器对超精密机床隔离基础振动有一定的效果,但是这属于被动隔振。
图1.1机床被动隔震系统1.2机床被动隔震系统的优点1)机构简单;2)技术成熟;3)成本较低;4)可靠性较好。
1.3机床被动隔震系统的缺点1)属于被动隔振;2)隔震效果不好。
1.4机床主动隔震系统图1.2表示了超精密车床隔振控制系统的结构原理:其中被动隔振元件为空气弹簧减震器,主动隔振元件为电磁作动器。
该系统可以简化为一个单自由度振动系统,空气弹簧具有一般弹性支承的低通滤波特性,其主要作用是隔离较高频率的基础振动,并支承机床系统;主动隔振系统具有高通滤波特性,其主要作用是有效地隔离较低频率的基础振动。
主、被动隔振系统相结合可有效地隔离整个频率范围内的振动。
地基ss0图1.2 机床主动隔震系统其中:m——机床质量c——空气弹簧粘性阻尼系数k0——空气弹簧刚度系数s——机床位移s0——地基位移1.5系统性能指标闭环系统单位阶跃响应的:超调量不大于5%;过渡过程时间不大于0.5秒。
2系统建模床身质量的运动方程为:其中:pF——空气弹簧所产生的被动控制力F——作动器所产生的主动控制力a假设空气弹簧温度恒定,则被动控制力可以表示为:其中:主动控制力可近似线性化地表示为:其中:其中,电枢电流Ia满足微分方程:其中:1.性能指标:闭环系统单位阶跃响应的:超调量不大于5%;过渡过程时间不大于0.5秒( =0.02)2.实际给定参数:某一车床的已知参数3.开环系统状态空间数学模型的推导过程: 对式0y s s =-两边求二次导,.....011()({1[/()]})n p a r r r e e e a y s F F c y k y p V V A y A k I m m==-+=-++-++对上式再求一次导,()01e a y cy k y k I m η=-+++其中1/()r r r e ep V V A y A η⎧⎫''⎡⎤=-+⎨⎬⎣⎦⎩⎭则I a=−my +cy +k 0y+ηK a,又由I a=−my +cy +k 0y+ηK a,代入Li̇a +RI a +E (I a ,ẏ)=u(t)00(,)()a e emy cy k y my cy k y LR E I y u t k k ηη++++++--+=,即Lmy ⃛+(Lc +Rm )ÿ+(Lk 0+Rc )ẏ+Rk 0y +Lω+Rω−k 0E (I a ,ẏ)=−k e u(t)令状态变量为x 1=y,x 2=ẏ,x 3=ÿ,得系统开环的状态方程为:1223003123e x x x x Rk Lk Rc k Lc Rm x x x x uLm Lm Lm Lm ⎧⎪=⎪=⎨⎪++⎪=----⎩ 于是状态空间表达式为:[]1122003312301000010100e x x x x uRkLk Rc x k Lc Rm x Lm Lm Lm Lm x y x x ⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎡⎤⎡⎤⎪⎢⎥⎢⎥⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎢⎥++⎪⎣⎦⎣⎦----⎢⎥⎢⎥⎨⎣⎦⎣⎦⎪⎪⎡⎤⎪⎢⎥=⎪⎢⎥⎪⎢⎥⎣⎦⎩代入系统参数,用MATLAB 求解得: 系统矩阵A 为:.[]112233123010000103157.8910.53315.798.60100x x x x u x x x y x x ⎧⎡⎤⎡⎤⎡⎤⎡⎤⎪⎢⎥⎢⎥⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎢⎥----⎪⎣⎦⎣⎦⎣⎦⎣⎦⎨⎡⎤⎪⎢⎥⎪=⎢⎥⎪⎢⎥⎪⎣⎦⎩3稳定性分析3.1李雅普诺夫第一法:用eig()函数,求得系统特征值为3个特征值均有负实部,故系统是稳定的。
奥迪轿车减振器的数学建模研究引言近年来,随社会的发展需要和人民生活水平的不断提高,汽车已走进千家万户,同时人们对汽车乘坐舒适性和平顺性要求亦越来越高,而汽车减振器和悬架对于保证汽车行驶平顺性、主动安全性、操纵稳定性、制动性有着重要的影响,汽车减振器和悬架性能的提高、能增加车轮行驶接地力、防止汽车方向发飘,尤其是汽车在曲线行驶时,能防止汽车制动易跑偏和侧滑甩尾、抑制车身长时间的余振、提高舒适性和主动安全性,鉴此,提高汽车减振器性能日益迫切。
本论文主要从液压技术和控制理论方面着手,首先分析了奥迪某型轿车减振器的相关工作原理和过程同时建立了相应的物理模型,然后根据减振器的压缩和伸张过程分别建立了相关的数学模型从而为后续研究提供准备。
1 减振器的工作原理双筒液压减振器的作用原理是,当车架与车桥做往复相对运动时,减振器中的活塞在缸筒内也作往复运动,于是减振器壳体内的油液便反复的从一个内腔通过一些窄小的孔隙流入另一内腔。
此时,孔壁与油液间的摩擦及液体分子内摩擦便形成对振动的阻尼力,使车身和车架的振动能量转化为热能,被油液和减振器壳体所吸收,然后散到大气中。
双向作用筒式减振器一般具有四个阀(如图1所示),即压缩阀、伸张阀(又称复原阀)、流通阀和补偿阀。
流通阀和补偿阀是一般的单向阀,其弹簧很弱,但弹簧上的油压作用力与弹簧力同向时,只要有很小的油压,阀便能开启;压缩阀和伸张阀是卸载阀,其弹簧较强,预紧力较大,只有当油压升高到一定程度时,阀才能开启;而当油压降低到一定程度时,阀即自行关闭。
减振器的运动有压缩与伸张两个过程。
复原过程:减振器的活塞和连杆部分相对于储油缸向上运动的过程。
压缩过程:减振器的活塞和连杆部分相对于储油缸向下运动的过程。
当车轮在路面上跳动时,弹簧被压缩,振动能量被弹簧吸收,这种吸收只是一种能量形式变换为另一种能量形式,即将动能转化为势能,从而缓和了地面的冲击对车身的影响,螺旋弹簧本身没有消耗能量,这个势能还存在,如果不把它消耗掉,动能势能相互转化的结果是,车身过个凸台或凹坑则摇晃不停。
汽车主动悬架系统建模及动力特性仿真分析首先,我们需要对汽车主动悬架系统进行机械建模。
主动悬架系统主要由减震器、弹簧、控制器和执行器组成。
减震器负责吸收车辆运动过程中的冲击力,提供较好的悬挂效果;弹簧则起到支撑车身和调整悬挂硬度的作用;控制器负责监测车辆的运动状态,并根据传感器的反馈信号调整悬挂硬度;执行器负责根据控制信号改变减震器的工作状态。
这些组成部分可以用方程和图表表示,以便进行后续仿真分析。
接下来,我们可以进行汽车主动悬架系统的动力特性仿真分析。
在仿真分析中,我们可以改变各个部件的参数,如弹簧硬度、减震器阻尼、控制器的响应时间等,以观察这些参数对悬挂系统的影响。
通过仿真分析,我们可以得到不同参数下悬挂系统的动力特性,如车辆的悬挂位移、车身加速度、车轮载荷等。
同时,我们也可以通过仿真分析来验证主动悬架系统对车辆行驶稳定性和驾驶舒适性的改善效果。
比较不同参数下的悬挂系统对车辆悬挂位移和车身加速度的变化,可以评估不同参数下的系统性能。
此外,还可以通过对比不同参数下车轮载荷的变化来了解悬挂系统对车辆操控性的改善效果。
通过这些仿真分析,我们可以得到最佳的悬挂系统参数,以优化车辆的行驶稳定性和驾驶舒适性。
总之,汽车主动悬架系统的建模和动力特性仿真分析是对该系统性能评估的重要环节。
通过对系统进行机械建模和动力仿真分析,可以得到系统的动力特性,并评估系统的改善效果。
这些分析结果将为系统设计和优化提供指导,以满足驾驶者的驾驶需求和提高汽车悬挂系统的性能。
正负刚度并联主动减振系统的结构设计与实现下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!一、引言随着工程技术的不断发展,机械振动控制技术越来越受到关注。
问题描述及空间状态表达式的建立1.1问题描述汽车减震系统主要用来解决路面不平而给车身带来的冲击,加速车架与车身振动的衰减,以改善汽车的行驶平稳性。
如果把发动机比喻为汽车的“心脏”,变速器为汽车的“中枢神经”,那么底盘及悬挂减震系统就是汽车的“骨骼骨架”。
减震系统不仅决定了一辆汽车的舒适性与操控性同时对车辆的安全性起到很大的决定作用,随着人们对舒适度要求的不断提高,减震系统的性能已经成为衡量汽车质量及档次的重要指标之一。
图1.悬架减震系统模型汽车减震系统的目的是为了减小路面的颠簸,为人提供平稳、舒适的感觉。
图2,是一个简单的减震装置的原理图。
它由一个弹簧和一个减震器组成。
从减震的角度看,可将公路路面看作是两部分叠加的结果:一部分是路面的不平行度,在汽车的行驶过程中,它在高度上有一些快速的小幅度变化,相当于高频分量;另一部分是整个地形的坡度,在汽车的行驶过程中,地形的坡度有一个缓慢的高度变化,相当于低频分量。
减震系统的作用就是要在汽车的行驶过程中减小路面不平所引起的波动。
因此,可以将减震系统看成是一个低通滤波器。
图2.减震系统原理图1.2空间状态表达式的建立对该系统进行受力分析得出制约底盘运动的微分方程(数学模型)是:22()()()()()d y t dy t dx t M b ky t kx t b dt dt dt++=+ 其中,M 为汽车底盘的承重质量,k 为弹簧的弹性系数,b 为阻尼器的阻尼系数。
将其转化为系统传递函数:222()()()2()n n n n s H s s s ωεωεωω+=++ 其中,n ω为无阻尼固有频率,ε为阻尼系数。
并且,n ω=2n b M ξω= 通过查阅相关资料,我们知道,汽车减震系统阻尼系数ε=0.2~0.4,而我们希望n ω越大越好。
在下面的计算中,我们规定n ω=6,ε=0.2。
所以,系统传递函数,可以转化为:2() 2.436() 2.436Y s s U s s s +=++ 根据现代控制理论知识,结合MATLAB 工具,将传递函数转化为状态空间矩阵和输出矩阵表示。
跨声速风洞模型主动减振系统试验研究余立;杨兴华;寇西平;曾开春;吕彬彬【摘要】为解决跨声速风洞测力试验模型的俯仰振动问题,研制了一套主动减振系统.该系统利用了模型/天平/支杆系统的响应特性,采用主动控制方法,以天平信号作为输入,采用速度负反馈,使用安装在支杆后端主动接头内的压电陶瓷作动器来抑制模型振动.地面试验结果表明,主动减振系统使模型/天平/支杆系统的俯仰一、二阶阻尼比分别提高20.8倍和12.8倍.风洞试验结果显示,法向力和俯仰力矩振动幅度分别下降71.0%和57.5%,风洞试验结果还表明主动减振系统对气动系数的影响相对较小.主动减振系统在多个模型的风洞试验中也得到验证,显示出良好的减振性能和模型适应性.【期刊名称】《南京航空航天大学学报》【年(卷),期】2019(051)004【总页数】8页(P526-533)【关键词】风洞;模型振动;阻尼;压电陶瓷作动器【作者】余立;杨兴华;寇西平;曾开春;吕彬彬【作者单位】中国空气动力研究与发展中心高速空气动力研究所,绵阳,621000;中国空气动力研究与发展中心高速空气动力研究所,绵阳,621000;中国空气动力研究与发展中心高速空气动力研究所,绵阳,621000;中国空气动力研究与发展中心高速空气动力研究所,绵阳,621000;中国空气动力研究与发展中心高速空气动力研究所,绵阳,621000【正文语种】中文风洞测力试验时,试验模型通过应变天平、尾支杆与中部支架相连。
在宽频的风洞气流激励下,模型与天平、支杆一起振动[1]。
在模型、天平和支杆组成的系统中,金属模型本身的振动频率高,振幅小,其振动不予考虑,因此,模型振动实质上是指天平/支杆组合体的弯曲、扭转以及拉伸振动,模型则表现为俯仰、偏航、滚转以及轴向刚体运动,模型/天平/支杆系统的主要模态有模型俯仰、偏航、滚转方向的支杆模态和模型俯仰、偏航方向的模型/天平模态以及轴向振动模态[2]。
在大型跨声速风洞中,模型/天平/支杆系统具有支撑频率低、结构阻尼小等特点,这将导致模型振动幅度大,严重影响试验数据质量,长时间剧烈振动还将导致天平或支杆疲劳破坏,对风洞运行安全造成严重威胁。
机械系统振动建模与仿真的研究进展引言机械振动是指机械系统中由于不平衡、不稳定、谐振或外部激励等原因引起的振动现象。
在工程实践中,了解机械振动的特性对于设计、优化和控制系统的性能至关重要。
为了深入研究机械振动,建立准确的振动模型和进行仿真模拟是必不可少的。
本文将重点介绍机械系统振动建模与仿真的研究进展。
一、振动建模方法1. 数学建模方法数学建模是机械振动研究中常用的一种方法。
它通过列举系统的动力学方程,包括质量、刚度和阻尼等参数,来描述系统的振动特性。
常用的数学建模方法包括方程建模方法、传递矩阵法和动力学分析法等。
这些方法可以精确地描述系统的振动特性,但对于复杂系统的建模和计算工作量较大。
2. 有限元建模方法有限元建模方法是一种基于数值计算的振动建模方法。
它将机械系统离散为有限数量的单元,通过数值计算方法求解系统的振动特性。
有限元模型可以灵活地建立复杂的系统,并通过改变单元的属性来模拟不同的振动情况。
有限元建模方法在机械振动研究中得到了广泛应用,特别适用于结构动力学和固体力学等领域。
二、振动仿真技术1. 模态分析模态分析是一种常用的振动仿真技术,它可以通过计算系统的固有振动模态和固有频率来了解系统的振动特性。
模态分析可以帮助工程师找到系统的主要振动模态和主要激励来源,从而进行合理的设计和优化。
2. 动态响应分析动态响应分析是一种通过施加外部激励,计算系统的动态响应的仿真技术。
通过动态响应分析,可以了解系统在不同激励条件下的振动响应情况,帮助工程师评估系统的稳定性和安全性。
3. 随机振动仿真随机振动仿真是一种用于研究随机激励下系统振动特性的仿真技术。
随机振动仿真常用于分析系统的可靠性和寿命,帮助工程师预测系统在不同激励条件下的振动情况。
三、应用案例1. 汽车振动仿真汽车振动是影响乘坐舒适性和车辆性能的重要因素。
通过振动建模和仿真技术,可以确定汽车系统中的振动源和主要振动路径,并进行优化设计,提高乘坐舒适性和车辆性能。
基于MATLAB/Simulink的振动主动控制系统仿真
曾威;刘亚平;侯锁霞;叶红玲
【期刊名称】《北京工业大学学报》
【年(卷),期】2006(000)0S1
【摘要】针对干扰力作用下的隔振系统,在振动控制过程中,根据检测到的振动信号,用Simulink软件包对隔振系统建立数学模型并进行系统性能仿真.对其仿真结果在时域和频域方面进行了分析,然后应用一定的控制策略经过实时计算,通过驱动作动器对控制目标施加一定的影响,达到抑制或消除振动的目的.经过分析比较,验证了最优控制的正确性及有效性.借助于MATLAB的控制箱及其有关命令,使设计与仿真的过程变得十分简单.
【总页数】5页(P)
【作者】曾威;刘亚平;侯锁霞;叶红玲
【作者单位】中国北车集团北京二七机车厂;河北承德钢铁有限公司;河北理工大学机械工程学院;北京工业大学机械工程与应用电子技术学院;北京;河北承德;河北唐山【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于Matlab/Simulink的汽车AMT系统仿真研究 [J], 张鹏
2.基于MATLAB and Simulink的波浪能装置液压能量转换系统仿真研究 [J], 叶寅;盛松伟;乐婉贞;王坤林;张亚群
3.基于Matlab/Simulink风电机组测试平台液压加载系统仿真研究 [J], 朱怡;孙渊;陈国初
4.基于Matlab/Simulink的液压式风力致热系统仿真研究 [J], 张晓明;刘晓畅;李洪波
5.基于MATLAB and Simulink的波浪能装置液压能量转换系统仿真研究 [J], 叶寅;盛松伟;乐婉贞;王坤林;张亚群
因版权原因,仅展示原文概要,查看原文内容请购买。
基于simulink的汽车底盘减震系统建模分析姓名:张勇杰学号:SA10157018指导老师:张世武汽车减震系统的基本目的就是提供一个平稳的驾驶,其主要包括弹簧和减震器两部分。
在经过不平路面时,吸震弹簧可以过滤路面的震动,但弹簧自身会有往复运动,而减震器主要用来抑制弹簧吸震后反弹时的震荡及来自路面的冲击。
减震器太软,车身就会上下跳跃,减震器太硬就会带来太大的阻力,妨碍弹簧的正常工作。
因而在汽车减震系统的设计中,一般硬的减震器与弹性系数大的弹簧匹配,软的减震器则与弹性系数小的弹簧匹配,而弹性系数则由车身质量来确定。
在本文中,汽车减震系统可以简化为一个弹性系数为k 的弹簧和一个黏度系数为v 的黏性减震器。
减震系统的基本目的就死要提供一个平稳的驾驶,而且要在通过和不让通过的频率之间没有明显的界限。
因此系统的设计应具有渐渐过渡的特性,这样的设计才比较合理。
在系统的建模中,不平的路面可以用阶跃信号来模拟。
如果该减震系统的阶跃响应呈现比较大的持续的震荡,那么在路面上的一个凸缘(相当于阶跃信号)将会形成不舒适的驾驶感。
1.减震系统数学模型的建立汽车减震系统的示意图如图1所示。
图1 汽车减震系统示意图其中,x(t)为车轮相对于水平路面行驶时的位移,y(t)为汽车底盘相对于水平路面行驶时的位移。
且有t=0时,汽车于水平路面上行驶,处于平衡状态,有x(t)=y(t)=0。
当x(t)≠0时,车身的平衡状态被打破。
对该系统进行受力分析,汽车底盘运动的微分方程为:22()()()()()d y t dy t dx t m b ky t b kx t dt dt dt++=+ 其中,m 是汽车底盘的质量,k 和b 为分别与弹簧和减震器有关的系数。
系统的传递函数为:2222()()()2n n n ns Y s H s X s s s ξωωξωω+==++其中,n ω=2n b mξω=。
n ω称为无阻尼自然频率,ξ称为阻尼系数。