磁悬浮飞轮优化设计与实验
- 格式:pdf
- 大小:1.55 MB
- 文档页数:8

飞轮储能用磁悬浮开关磁阻电机多目标优化设计孙玉坤;张宾宾;袁野【摘要】研究了一种基于遗传粒子群综合算法(GPSOA)的飞轮储能(FES)用的单绕组磁悬浮开关磁阻电机(SWBSRM)多目标优化设计方案.结合有限元分析(FEA),通过敏感性分析得到SWBSRM悬浮力与效率随主要尺寸参数变化的一般规律.在此基础上,利用GPSOA以悬浮力和效率为目标函数对SWBSRM进行了全局寻优,获得使悬浮力最大和效率最高的参数优化组合.利用FEA对比优化前后电机悬浮力、铁损及磁密的大小,验证了GPSOA多目标优化的有效性.【期刊名称】《电机与控制应用》【年(卷),期】2018(045)010【总页数】7页(P53-58,119)【关键词】飞轮储能;单绕组磁悬浮开关磁阻电机;遗传粒子群综合算法;多目标优化【作者】孙玉坤;张宾宾;袁野【作者单位】江苏大学电气信息工程学院,江苏镇江212013;南京工程学院电力工程学院,江苏南京210000;江苏大学电气信息工程学院,江苏镇江212013;江苏大学电气信息工程学院,江苏镇江212013【正文语种】中文【中图分类】TM301.20 引言国家正规划与大力发展智能电网。
微电网作为其重要的组成部分,因其充分利用可再生能源进行的分布式发电而受到广泛关注。
微电网是一种小型的集发、配、用电等功能于一体的电力系统,主要由分布式电源、储能装置、能量转换系统等组成。
分布式发电在微电网系统中得到了充分利用。
微电网系统中,分布式电源提供的输出功率具有间歇性和随机性,并且终端负荷也具有随机性。
因此,为了维持微电网中瞬时功率的平衡,储能系统是合理的选择,其对微电网的稳定运行、改善电能质量有不可或缺的作用,是微电网安全稳定运行的关键。
文献[1-3]提出各类储能技术,并分析其各自优缺点,在微电网安全稳定运行的基础上,提出适用于微电网的飞轮储能(Flywheel Energy Storage,FES)。
FES是一种全新的机械储能方式,具有储能密度大、效率高、模块性强、寿命长、充电时间短、维护简便等优点,是发展前景十分广阔的一种清洁电能储存方式。

3.磁悬浮飞轮储能技术方案1)磁悬浮飞轮储能技术原理飞轮储能是一种利用高速旋转的飞轮存储能量的技术,主要由高速飞轮和同轴的电动/发电机、磁悬浮轴承及双向功率变换器构成。
飞轮储能的工作原理:当充电时,采用电动机工作模式,利用电动机驱动飞轮高速旋转,将电能转变为机械能储存,完成充电过程,如图1所示;当放电时,采用发电机工作模式,利用飞轮高速旋转的惯性带动转子旋转,通过发电机将飞轮存储的动能转换成电能输出,如图2所示;飞轮储能通过转子的加速和减速,实现电能的存入和释放。
图1飞轮储能设备充电原理图附图13飞轮储能设备放电原理图2)磁悬浮飞轮储能设备组成磁悬浮飞轮储能设备采用标准机柜式成套设计,柜内包含飞轮储能模块、磁悬浮控制单元、飞轮控制单元、电力电子变流器、真空泵等核心部件。
系统采用大屏幕触摸屏图像用户界面,操作使用方便,如下图所示:附图14磁悬浮飞轮储能设备主要组成部分DC/AC双向变流器(IGBT)磁悬浮飞轮储能设备的充电和放电是通过控制飞轮功率转换模块中的半导体开关来实现的,由于飞轮在真空状态下工作,通过使用IGBT 高频开关,可以减少飞轮定子绕组中存在的电流谐波。
通过使用脉宽调制技术(PWM),IGBT 可实现快速开通和关断,产生近似正弦波的波形。
平稳的波形对于减少谐波和控制电流纹波起到了至关重要的作用。
飞轮控制器模块飞轮系统的核心,包含一个数字控制器,用于监视和控制VDC内的各个子系统。
飞轮控制器的功能包括:飞轮的充电和放电、子系统组件的监测和控制以及处理系统告警、警报、故障和停机。
磁悬浮轴承控制器(MBC)提供飞轮转子的磁悬浮控制,并包含数字控制器、传感器解调器和电流放大器。
MBC通过五轴主动磁悬浮轴承系统来监视和控制飞轮转子的位置。
转子位置信号反馈到MBC的控制模块,通过数字滤波器补偿程序为每路电流放大器输出控制信号,电流放大器向每个轴的传动器(控制器)提供驱动电流,从而将力施加在转子上,保持飞轮转子处于正常位置。

基于iSIGHT的磁悬浮反作用飞轮优化设计
基于iSIGHT的磁悬浮反作用飞轮优化设计
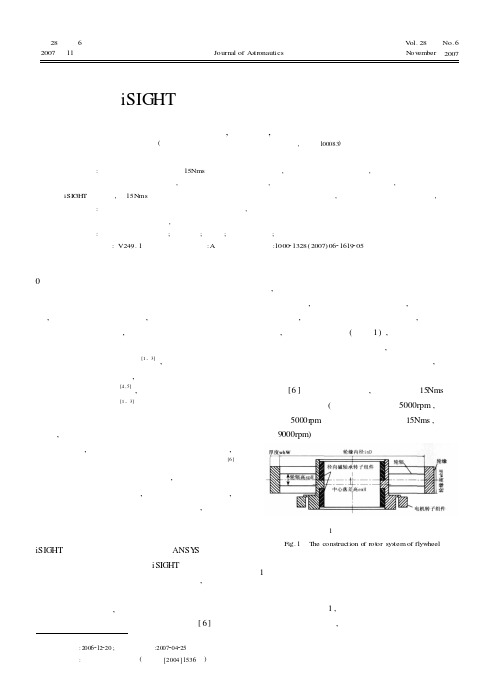
针对一种额定角动量为15Nms的磁悬浮反作用飞轮,分析了系统的控制模型,得知若飞轮转子质心位于上下径向磁轴承几何对称中心,可以减少控制参数的耦合,简化控制器设计.基于此分析结论,以优化设计软件iSIGHT为平台,对15Nms的磁悬浮反作用飞轮进行了多学科优化设计方法研究,改进了原有的优化设计方法,设计结果表明:在保证多约束条件下使转子质量达到最小,同时降低控制系统调试和检测的难度.此优化方法进一步提高了飞轮的设计和调试效率,有助于实现系统的高精度控制.
作者:叶全红李红韩邦成 YE Quan-hong LI Hong HAN Bang-cheng 作者单位:北京航空航天大学仪器科学与光电工程学院,北京,100083 刊名:宇航学报 ISTIC PKU 英文刊名: JOURNAL OF ASTRONAUTICS 年,卷(期):2007 28(6) 分类号:V249.1 关键词:磁悬浮反作用飞轮磁轴承耦合控制器设计优化设计。

1. 了解磁悬浮技术的原理和基本操作。
2. 掌握磁悬浮实验的步骤和方法。
3. 通过实验,观察磁悬浮现象,分析磁悬浮系统的稳定性和悬浮高度与激磁电流的关系。
二、实验原理磁悬浮技术是利用磁力使物体悬浮在空中,避免物体与支撑面接触,从而减少摩擦和能量损耗。
实验中,通过改变激磁电流的大小,观察磁悬浮系统在不同悬浮高度下的稳定性。
三、实验器材1. 磁悬浮实验装置一套(包括磁悬浮盘、磁悬浮支架、激磁电流线圈、电源等)。
2. 测量工具(如尺子、万用表等)。
四、实验步骤1. 搭建实验装置,将磁悬浮盘放置在磁悬浮支架上,确保磁悬浮盘与支架平行。
2. 将激磁电流线圈绕在磁悬浮盘上,确保线圈与磁悬浮盘紧密贴合。
3. 连接电源,调整激磁电流的大小。
4. 观察磁悬浮盘在不同激磁电流下的悬浮状态,记录悬浮高度和激磁电流的对应关系。
5. 改变激磁电流的大小,重复步骤4,观察磁悬浮盘的悬浮状态。
五、实验结果与分析1. 观察到当激磁电流较小时,磁悬浮盘处于悬浮状态,但悬浮高度较低;随着激磁电流的增大,悬浮高度逐渐升高。
2. 当激磁电流过大时,磁悬浮盘开始接触支架,悬浮状态不稳定。
3. 通过实验数据可知,悬浮高度与激磁电流之间存在一定的关系,具体表现为:在一定范围内,激磁电流越大,悬浮高度越高。
1. 磁悬浮技术是一种利用磁力实现物体悬浮的技术,具有减少摩擦和能量损耗的优点。
2. 磁悬浮系统的稳定性与激磁电流的大小有关,在一定范围内,激磁电流越大,悬浮高度越高,系统越稳定。
3. 通过本实验,掌握了磁悬浮实验的步骤和方法,为后续研究磁悬浮技术奠定了基础。
七、实验总结本次实验成功地实现了磁悬浮现象的观察,通过实验数据的分析,得出了悬浮高度与激磁电流的关系。
在实验过程中,我们了解到磁悬浮技术的原理和应用,提高了对磁悬浮系统的认识。
同时,通过实际操作,锻炼了我们的动手能力和实验技能。
在今后的研究中,我们可以进一步探讨磁悬浮系统的优化设计,提高磁悬浮技术的稳定性和悬浮高度,为磁悬浮技术的发展和应用提供有力支持。
新型磁悬浮陀螺飞轮驱动电机与磁轴承控制系统设计传统机械飞轮由于定转子之间存在接触,有摩擦力大、功耗高、寿命短和噪声大缺点。
磁悬浮飞轮克服了传统机械飞轮缺点,还具有主动振动控制和振动抑制的优势。
磁悬浮框架飞轮通过偏转磁轴承迫使高速转子偏转,改变转子转速方向,输出瞬间大力矩,驱动航天器平台快速机动。
新型磁悬浮陀螺飞轮同时具备框架飞轮的大控制力矩输出和姿态敏感功能,即能利用偏转磁轴承迫使高速转子进动,输出大力矩,也可通过偏转磁轴承补偿干扰力矩,敏感航天器姿态。
新型磁悬浮陀螺飞轮的驱动电机和磁轴承的控制系统是其高精度力矩输出和姿态敏感的保障,控制器的优劣将直接影响到新型磁悬浮陀螺飞轮的运行状态。
本文以新型磁悬浮陀螺飞轮为研究对象,对新型磁悬浮陀螺飞轮的驱动电机和磁轴承控制系统进行了设计,从以下四个方面进行了深入研究。
(1)介绍了新型磁悬浮陀螺飞轮的总体结构,新型磁悬浮陀螺飞轮的结构对于搭建的控制系统性能好坏有很大的影响。
磁轴承和驱动电机作为被控对象,对其进行了详细的介绍,说明了其工作原理,建立了控制模型,为其高精度驱动做了铺垫。
(2)针对新型磁悬浮陀螺飞轮高精度转速控制的要求,对飞轮电机进行了分析,得到了转速误差的两个主要来源:一是电机本体结构,二是电机换相。
重点对本体结构导致的误差进行了分析,提出了基于磁场测量的磁钢修正方案,设计了基于霍尔原理的磁场均匀性测量装置。
最后,在搭建的装置上进行了磁场测量实验,实验证明:该装置能够对磁场均匀性进行测量,对电机磁钢装配具有很好的参考作用,提高驱动电机转速精度。
(3)针对高速驱动电机调速范围广、精度要求高的特点,提出了基于模糊自适应PI控制器的转速调节算法。
以新型磁悬浮陀螺飞轮驱动电机为对象,设计了一套以DSP为控制核心的电机驱动器,完成了驱动器的原理图设计和PCB布线。
最后,编写了电机转速控制代码,并在设计的驱动器上实现了速度调节,通过对采集的霍尔信号和反电动势的波形进行分析,结果表明,该驱动器和算法可较好的实现电机转速控制。