机器人循迹原理及程序实现(基础篇下)
- 格式:pdf
- 大小:180.08 KB
- 文档页数:2
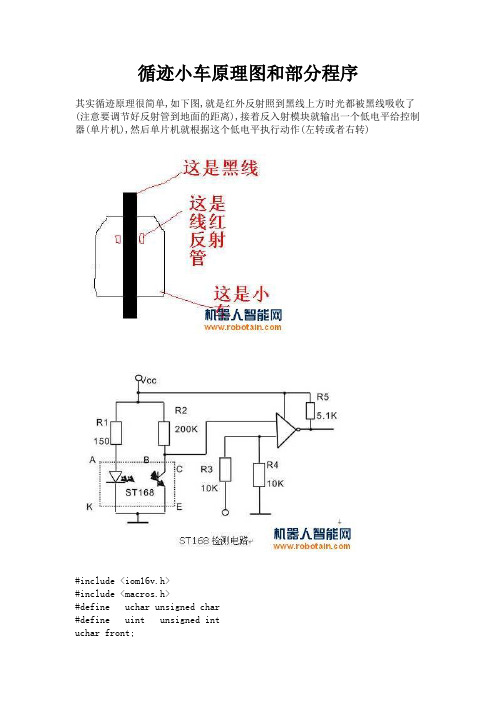
循迹小车原理图和部分程序其实循迹原理很简单,如下图,就是红外反射照到黑线上方时光都被黑线吸收了(注意要调节好反射管到地面的距离),接着反入射模块就输出一个低电平给控制器(单片机),然后单片机就根据这个低电平执行动作(左转或者右转)#include <iom16v.h>#include <macros.h>#define uchar unsigned char#define uint unsigned intuchar front;void delayus(uint us){while(us)us--;}/*一毫秒的延时*/void delay(uint i){unsigned int a, b;for (a = 1; a < i; a++){for (b = 1; b<1141; b++){;}}}/******************* 一毫秒的延时**********************/void delayms(uintms){uinti,j;for(i=0;i<ms;i++)for(j=0;j<1141;j++);}/**********************小车停车函数***************************/void stop(){OCR1A=0;OCR1B=0;PORTD&=~BIT(PD0);PORTD&=~BIT(PD1);PORTD&=~BIT(PD2);PORTD&=~BIT(PD3); }/*****************小车向前向后函数*****************/void go(uchar speed){OCR1A=speed;OCR1B=speed;if(front==1){PORTD&=~BIT(PD0);PORTD&=~BIT(PD1);PORTD|=BIT(PD2);PORTD|=BIT(PD3 );}else{OCR1A=200;OCR1B=200;PORTD&=~BIT(PD0);PORTD&=~BIT(PD1);PORTD|=BIT(PD2);PORTD|=BIT(PD3);}}/**************小车向左向右的函数*******************/void l_r(uchar p){switch(p){case 'r' :{PORTD&=~BIT(PD0);PORTD&=~BIT(PD6);PORTD|=BIT(PD1);PORTD|=BIT( PD7);OCR1A=200;OCR1B=0;break;}case 'l' :{PORTD&=~BIT(PD0);PORTD&=~BIT(PD6);PORTD|=BIT(PD1);PORTD|=BIT( PD7);OCR1A=0;OCR1B=200;break;}}}void main(){uchartemp,active;DDRA=0X00;DDRB=0X00;PORTB = 0xFF;DDRC = 0xFF;PORTC = 0x03;DDRD = 0xFF;PORTD = 0xFF;/*端口设置*/TCCR1A=0xA1;TCCR1B=0x03;/*8位相位修正PWM,64分频*/TCNT1H=0xFF;TCNT1L=0XFF;delay(300);while(1){front=1;temp=PINB&0XFF;if(temp!=0XFF){switch(temp)//////这就是根据反射模块传给单片机的信号进行各动作 {case 0b11111110:{l_r('r');break;}case 0b11111101:{l_r('l');break;}case 0b11111011:{l_r('r');break;}case 0b11110111:{l_r('l');break;}case 0b11101111:{l_r('r');break;}case 0b11011111:{l_r('l');break;}case 0b10111111:{stop();delay(1000);break;} default: go(80);}}}。


循迹机器人沿着黑色轨迹线转弯的原理循迹机器人是一种能够沿着黑色轨迹线行进的智能机器人,其转弯的原理主要依赖于两个方面:传感器和控制系统。
首先,循迹机器人的底部配备了多个红外线传感器,这些传感器能够感知地面上的黑色轨迹线,并将信号传输给控制系统。
当机器人行进到转弯的位置时,某些传感器会接收到轨迹线的信号变化,而其他传感器则不会,这时就可以根据传感器的信号差异来确定转弯的方向和角度。
其次,循迹机器人的控制系统能够根据传感器的信号来控制机器人的转弯行为。
当机器人需要向左或向右转弯时,控制系统会控制机器人左右轮子的运动速度,使机器人转动到指定的角度和方向。
总的来说,循迹机器人沿着黑色轨迹线转弯的原理就是利用红外线传感器感知轨迹线的信号变化,并通过控制系统控制机器人左右轮子的运动来实现转弯的行为。
- 1 -。

怎么实现循迹方案简介循迹技术是指让机器人或车辆能够根据特定的线路进行移动或导航的技术。
循迹方案是机器人或车辆能够实现自动驾驶、路径规划和避障等功能的关键。
本文将介绍如何实现一个基于循迹的方案。
1. 传感器选择实现循迹方案的第一步是选择适合的传感器。
常用的传感器包括红外线传感器、光电传感器和摄像头等。
下面分别介绍这些传感器的特点和适用场景。
1.1 红外线传感器红外线传感器是一种经济实用的循迹传感器。
它可以通过测量地面上反射的红外线信号来检测机器人或车辆的位置。
它的工作原理是利用红外线发射器发射红外线,然后由红外线传感器接收并检测反射回来的红外线信号。
红外线传感器适用于室内或室外的光线较暗的环境。
1.2 光电传感器光电传感器是一种常用的循迹传感器。
它可以通过测量地面上的光线强度来检测机器人或车辆的位置。
光电传感器适用于室内或室外的光线较亮的环境。
与红外线传感器相比,光电传感器的精度更高,但成本较高。
1.3 摄像头摄像头是一种高级的循迹传感器。
它可以通过拍摄地面图像并进行图像处理来检测机器人或车辆的位置。
摄像头适用于复杂的环境和要求较高精度的应用场景。
但是,由于摄像头需要大量的计算资源,因此在资源受限的设备上使用时需要考虑计算性能。
2. 循迹算法选择合适的传感器后,下一步是实现循迹算法。
循迹算法的目标是根据传感器获取的数据确定机器人或车辆应该沿着的路径。
2.1 简单阈值算法简单阈值算法是一种基本的循迹算法。
它通过设定一个阈值来判断传感器数据是否超过或低于该阈值,从而确定机器人或车辆应该沿着哪个方向移动。
例如,可以通过红外线传感器检测到的红外线信号强度来判断机器人应该往左转、往右转还是直行。
2.2 PID控制算法PID控制算法是一种常用的循迹算法。
它通过比较期望的路径和当前位置的偏差来调整机器人或车辆的控制信号,从而实现精确的循迹。
PID控制算法由比例控制、积分控制和微分控制三部分组成。
通过调节这三部分的权重和参数,可以获得较好的循迹效果。

循迹机器人沿着黑色轨迹线转弯的原理
黑线跟踪机器人是一种自主跟踪黑线的机器人,它主要利用三个传感器--红外线解码(对路径上特定颜色物体的解码)、红外照射(可以检测到红外线反射回来的强度)和红外光敏元(可以怎么强度的红外线,从而检测出特定物体的颜色和形状),它们可以自主识别不同的轨道,根据不同的颜色、面积、形状和强度,自动跟踪引导以及做出相应的改变。
首先要知道机器人的头是面朝前的,所以它需要使用前轮来改变转向,在轨迹线上行驶的同时,可以通过传感器检测到路径上有特定颜色物体,接着通过红外照射检测到反射回来的强度,将其转换成一定的数值,再通过算法对数据进行分析,不断的改变机器人的行进方向,机器人将会沿着能被检测到特定颜色物体的路径,就实现了沿着黑色轨迹线转弯这一原理。
全国大学生电子设计竞赛自动循迹小车摘要摘要:本设计主要包括信号检测模块、主控模块、电机驱动模块。
信号检测模块采用LCD1314电感数字转换器,通过IIC总线与从机通信从而实现循迹和检测硬币。
主控电路采用MC9S12SX128单片机为控制芯片。
电机驱动模块采用L298N 专用电机驱动芯片。
信号检测模块将采集到的路况信号发送给MC9S12SX128单片机,经单片机处理过后对L298N 发出指令进行相应的调整。
单片机通过输出PWM波和对LDC1314采集的信息进行处理,来控制小车的速度及转向并实现自动循迹的功能。
关键词:智能小车,MC9S12SX128,L298N IIC总线ldc1314目录一、系统方案论证 (4)1.系统结构 (4)2.方案论证比较 (4)(1)微控制器模块 (4)(2)电机模块 (4)(3)电机驱动模块 (4)(4) 显示模块 (5)(5) 电源模块 (5)二、测控方法分析 (5)1.控制算法分析 (5)2.运动控制分析 (6)三、系统电路设计 (7)1.系统结构 (7)2.电路设计 (7)四、系统测试与分析 (8)1.测试方案 (8)2.测试条件与仪器 (8)3.测试结果 (8)(1)基本一测试 (8)(2)基本二测试 (8)(3) 基本三测试 (8)五、测试分析与结论 (9)参考文献 (9)附录1:部分源程序 (10)自动循迹小车(C题)【本科组】一、系统方案论证1.系统结构系统以MC9S12XS128单片机为主控器,以5110显示屏、L298N驱动模块、直流电机分别实现转速、时间、距离显示、驱动等功能。
使用C语言编写程序,通过速度编码器检测并读出车轮的转速,并通过触摸按键选择系统的转速模式,实现不同速度的调节。
2.方案论证比较(1)微控制器模块方案一:MC9S12XS128单片机飞思卡尔官方函数库应用简便,开发周期短,速度和功耗方面优势明显。
方案二:51单片机指令集简便,超低功耗,熟练使用开发周期长。
循迹机器人的工作原理嘿,朋友们!今天咱来唠唠循迹机器人的工作原理。
你说这循迹机器人啊,就像是个特别机灵的小探险家!它能在各种地方穿梭,还不会迷路,厉害吧?那它到底是咋做到的呢?其实啊,就跟咱人走路似的,得有眼睛看路吧。
循迹机器人也有它的“眼睛”,一般就是各种传感器啦。
这些传感器就像它的小触角,能敏锐地感知周围的环境。
比如说,有条黑色的线,它就能通过传感器察觉到这条线的存在。
然后呢,它的小脑袋瓜,也就是它的控制系统,就开始发挥作用啦。
这个控制系统就像个聪明的指挥官,接收到传感器传来的信息后,就开始指挥机器人的行动。
它会告诉机器人该往哪儿走,是直着走,还是拐弯。
这就好比你要去一个地方,你得知道路怎么走吧。
循迹机器人也是一样,它得根据传感器的信息和控制系统的指令来行动。
如果传感器告诉它线往左拐了,那控制系统就会让它向左拐,多有意思呀!你想想看,要是没有这些传感器和控制系统,那这机器人不就像个无头苍蝇一样乱撞啦?那可不行,那还怎么完成任务呀!而且啊,循迹机器人的行动还特别灵活呢。
它能根据不同的情况做出不同的反应。
就像咱人在路上走,突然遇到个障碍物,咱得绕过去或者跨过去吧。
循迹机器人也一样,要是遇到啥东西挡路了,它也能聪明地避开。
你说这是不是很神奇?一个小小的机器人,居然能这么厉害。
它可以在工厂里帮忙运输东西,可以在危险的地方进行探测,用处可多啦!咱再想想,要是没有这些高科技的玩意儿,那得有多少事情得靠咱人自己去干呀,多累呀!所以说呀,科技的发展真的给咱带来了好多便利呢。
循迹机器人的工作原理虽然看起来挺复杂,但其实理解起来也不难呀。
就是传感器感知,控制系统指挥,机器人行动,就这么简单!哎呀,咱生活在这个科技发达的时代,真的是太幸福啦!以后说不定还会有更厉害的机器人出现呢,那时候的生活该有多精彩呀!你说是不是?反正我是特别期待呢!。
智能循迹小车毕业论文智能循迹小车毕业论文引言:智能循迹小车是一种基于人工智能技术的智能机器人,它能够通过感知环境中的路径信息,自主地沿着预定的轨迹行驶。
本文将探讨智能循迹小车的原理、应用以及未来的发展前景。
一、智能循迹小车的原理智能循迹小车的核心原理是通过传感器感知环境中的路径信息,并通过算法进行实时处理和决策。
传感器通常包括红外线传感器、摄像头等,它们能够感知地面上的路径线或标志物。
通过收集和处理传感器数据,智能循迹小车能够判断自身位置和方向,并做出相应的行驶决策。
二、智能循迹小车的应用智能循迹小车在现实生活中有着广泛的应用。
首先,它可以用于物流行业,实现自动化的仓储和运输。
智能循迹小车能够准确地遵循预定的路径,将货物从仓库中送到指定地点,提高了物流效率。
其次,智能循迹小车可以应用于智能家居领域。
它可以根据用户设定的路径,自动清扫地面或搬运物品,为人们的生活提供便利。
此外,智能循迹小车还可以应用于农业领域,用于自动化的播种、施肥和除草等操作,提高农作物的生产效率。
三、智能循迹小车的挑战虽然智能循迹小车在应用领域有着广泛的前景,但是它也面临着一些挑战。
首先,路径感知的准确性是关键。
由于环境的复杂性和不确定性,智能循迹小车需要具备高精度的传感器和算法,以确保准确地感知路径信息。
其次,智能循迹小车的自主决策能力也是一个挑战。
在复杂的环境中,智能循迹小车需要能够根据实时的路径信息做出灵活的决策,以应对各种情况。
最后,智能循迹小车的安全性也是一个重要问题。
在行驶过程中,它需要能够识别和避免障碍物,确保行驶的安全性。
四、智能循迹小车的未来发展随着人工智能技术的不断发展,智能循迹小车有着广阔的未来发展前景。
首先,智能循迹小车可以与其他智能设备进行联动,实现更加智能化的操作。
例如,智能循迹小车可以通过与智能家居设备的连接,实现更加智能化的家庭服务。
其次,智能循迹小车可以进一步提高自身的感知和决策能力,实现更加高效和安全的行驶。