平台升降机构设计论文
- 格式:doc
- 大小:23.00 KB
- 文档页数:8
剪叉式高空作业平台升降装置结构优化设计剪叉式高空作业平台是一种垂直升降、应用普遍的高空作业设备。
由于它的剪叉机构具有伸缩性,使得该设备广泛运用于室内外比较狭窄的空间,比如大厅、车间、车站等场合。
为了提高剪叉式高空作业平台升降装置的承载能力,本文对升降装置的结构进行了优化设计,具体开展以下研究工作:以某型号的剪叉式高空作业平台升降装置为研究对象。
首先,建立了剪叉式高空作业平台升降装置的力学模型,计算了剪叉升降装置中的液压缸推力,并通过MATALB遗传算法工具箱优化了剪叉臂体上液压缸铰点位置,从而降低了液压缸推力;利用Pro/E软件对剪叉式高空作业平台进行运动学仿真,分析了液压缸铰点位置的改变对平台平稳性的影响。
其次,对剪叉升降装置进行了静力学分析,计算了剪叉升降装置各铰点力、臂体危险截面应力,并根据计算结果对强度不满足要求的臂体结构进行了改进。
再次,采用ANSYS软件建立了参数化液压缸有限元模型,并对其进行了静力学分析;创新性的提出了使用刚性杆单元模拟液压油,对液压缸进行了非线性屈曲分析,并且采用能量法计算液压缸极限载荷,验证了非线性屈曲分析的准确性。
最后,基于MATLAB GUI开发了剪叉式高空作业平台升降装置结构优化设计软件,将液压缸推力计算、液压缸铰点位置优化、升降装置力学分析等模块集于软件之中。
本课题研究的内容为剪叉升降装置的设计研发提供了理论依据。
开发的辅助软件提高了产品优化设计的效率。
液压升降作业平台自主设计与分析摘要:本文介绍了一种大吨位液压升降平台工艺装备的原理和结构设计及其作用,此结构的设计特点:承载能力强,安全系数高,工作性能可靠,对工作台面、支撑点、剪刀式举升臂进行了有限元受力分析,并得到了其可行性的相关技术参数,提供了其现场实际的尺寸确定的依据,改进后的液压和电器元件,与制作的机械部分的匹配性,通过现场得以验证,完全满足生产实际需求。
关键词:大吨位液压升降平台液压系统1 制作背景随着市场的需求、客户的要求,产品的升级换代,推土机的功率由原来的SD13/SD16/SD22/SD32系列到现在的SD52系列.再到SD90系列,原来推土机事业部整备车间4#装配升降平台原设计承重为60t,在装配大功率推土机装SD52系列时,原有的液压升级平台托举最大重量为60t,因SD90推土机自重达86t,为满足生产需求,现设计一台额定吨位100t的液压升降平台,该液压升降平台是推土机事业部针对装配SD90大功率推土机的得力助手,该装置主要用于大功率推土机装配过程中的举升,便于装配其他部件(履带的安装、驱动桥、作业台车)的作用。
2 装置的构成该装置的组成部分有三大部分:机械部分、液压部分、电控部分总的技术指标如表1所示。
3 机械系统部分首先对机械部分的结构进行设计,参照公司原有的60t液压升降平台的工作台面进行受力分析、剪叉支撑架依据有限元分析的基本流程进行分析。
3.1 工作台受力分析发现原工作台的强度薄弱带在四周,对原工作台的结构进行了优化设计,对平行四边形机构其支撑点的位置放置的确定,对其重新设计加固到达整个工作台的承载能力的均衡性和一致性,通过创新性地优化平台主体机(见图1)。
3.2 支撑举升臂受力分析对油缸支撑点到折臂段进行了设计并对其进行有限元分析见图2,和60t的相比较整体机构由单一板式改为方箱式,浮动轮由原来的轴承滚轮改为纯滚轮支撑,实现滑动摩擦低转速转动,增加了安全锁紧机构,机械固定档位可阻止突然下降,提高了安全系数。
液压升降平台设计毕业论文液压升降平台设计毕业论文1 绪论液压升降平台是一种广泛用于工厂、商店、机关及建筑装修行业,物流产业及机械加工产业的作业工具。
液压升降平台作为一种起重设备,从50年代初创建至今,已经形成了一定的生产规模、具备了一定的技术水平、也基本形成了比较完整的设计、生产、销售体系,能基本满足国民经济对该设备的需求。
目前国家继续实施的财政政策,拉动着我国基础设施建设的高速发展,而起重设备作为国民经济的重要基础设备广泛应用于经济建设的各行各业,如冶金、煤炭、化工、电力、交通和制造等产业。
随着现代科学技术的迅速发展,工业生产规模的扩大和自动化程度的提高,起重机在现代化生产过程中应用越来越广,作用也愈来愈大,对起重机的要求也越来越高。
液压升降平台正朝着大型化、高速度、人性化、环保性、通用产品小型化、零部件的模块化和多样化及安全监察制度化与规范性方向发展。
1.1液压升降平台在机械工业中的应用及相关技术概况液压升降平台的发展与液压技术的发展是密切相关的,随着液压技术的发液压升降平台也在不停的向前发展。
液压升降平台做为起重机械在我国由于起步较晚有几个令人担忧的因素。
(1)整体技术含量偏低,突出表现在钢结构件制作材料和电气控制系统水平较低;(2)规模化发展不够,突出表现在低水平重复建设严重,造成资源浪费,专业化发展严重滞后;(3)恶性竞争严重,合理利润难保,并造成安全措施投入极少,事故率居高不下。
不过由于今几年中过液压技术、电控技术、传感技术等技术的迅速发展,以上情况得到了很大的改善。
液压升降平台由于制造成本不高,应用广泛在我国也获得了很大的发展前景和发展潜力。
1.1.1 传感技术感技术同计算机技术与通信技术一起被称为信息技术的三大支柱。
从仿生学观点,如果把计算机看成处理和识别信息的“大脑”,把通信系统看成传递信息的“神经系统”的话,那么传感器就是“感觉器官”。
传感技术是关于从自然信源获取信息,并对之进行处理(变换)和识别的一门多学科交叉的现代科学与工程技术,它涉及传感器(又称换能器)、信息处理和识别的规划设计、开发、制/建造、测试、应用及评价改进等活动。
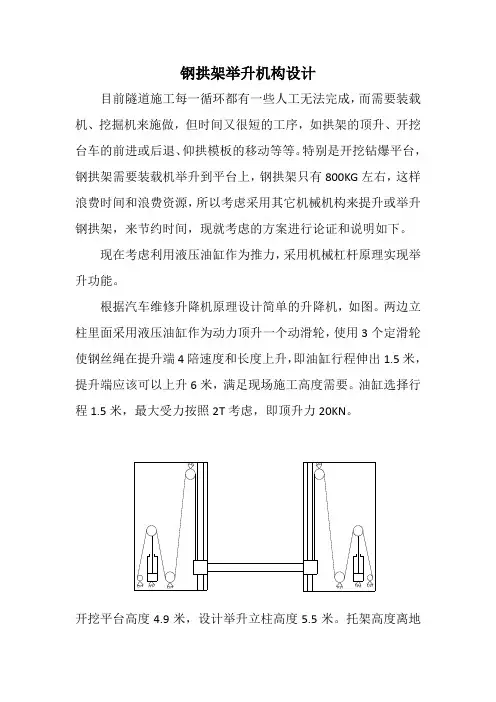
钢拱架举升机构设计目前隧道施工每一循环都有一些人工无法完成,而需要装载机、挖掘机来施做,但时间又很短的工序,如拱架的顶升、开挖台车的前进或后退、仰拱模板的移动等等。
特别是开挖钻爆平台,钢拱架需要装载机举升到平台上,钢拱架只有800KG左右,这样浪费时间和浪费资源,所以考虑采用其它机械机构来提升或举升钢拱架,来节约时间,现就考虑的方案进行论证和说明如下。
现在考虑利用液压油缸作为推力,采用机械杠杆原理实现举升功能。
根据汽车维修升降机原理设计简单的升降机,如图。
两边立柱里面采用液压油缸作为动力顶升一个动滑轮,使用3个定滑轮使钢丝绳在提升端4陪速度和长度上升,即油缸行程伸出1.5米,提升端应该可以上升6米,满足现场施工高度需要。
油缸选择行程1.5米,最大受力按照2T考虑,即顶升力20KN。
开挖平台高度4.9米,设计举升立柱高度5.5米。
托架高度离地面300mm,实际托架起升高度4.7米。
两边提升机构主立柱采用8#角钢,3根高度5.5.米,周边采用5个的钢板。
按照设计起升重量2T考虑,选择钢丝绳规格为Φ8,从表中查出Φ8最小破断拉力为33.4KN(3.34T),2跟钢丝绳总的最小破断力就为6.68T,安全系数达到3.34。
钢丝绳2根每根长度15米左右(根据实际现场安装确定)。
下横梁选择20#工字钢1根,长度5.3米,托架选用18#工字钢进行加工2根,高度0.8米,托架翻转油缸采用行程35cm的双向油缸。
滑动横梁的立柱采用12#槽钢2根,高度5米。
滑轮选择40#滑轮,相当于每个滑轮必承重为400KG,考虑安全系数应按2陪选择。
液压系统图如下。
液压系统单独设在平台方便的地方,用油管连接到2个油缸。
液压系统由泵站1台、升降油缸2件、翻转油缸6个及高压软管1套组成。
1、液压泵站系统额定压力:16MPa,油泵驱动电机功率5.5千瓦。
2、升降油缸规格:HG1-E80/56-1500,带双向液压锁。
3、翻转油缸规格:HG1-E40/28-300,无杆端安装单向节流阀,用来调节同侧2个油缸基本同步。
目录摘要 (Ⅰ)ABSTRACT (Ⅱ)第1章绪论 (1)1.1升降台的简介 (1)1.2传动方式的比较及液压传动的特点 (1)1.3液压传动技术的发展概况及在升降台上的应用 (2)1.4本项目要解决的问题 (3)2.1升降台的整体结构设计 (4)2.2升降台的机构分析 (5)2.2.1 单剪式液压升降台的结构简化 (5)2.2.2 单剪式液压升降台的受力分析 (5)2.2.3液压缸的选择 (8)2.2.4杆件的校核................................................................................. 错误!未定义书签。
第3章移动装置的设计 (12)3.1小车的结构设计 (12)3.2链传动设计 (14)3.3传动轴的校核 (16)3.3.1 轴的强度校核 (16)3.3.2 轴的刚度校核 (19)3.3.3 轴承的校核 (20)第4章控制系统设计 (21)结论 (23)参考文献 (24)致谢 (25)摘要升降台主要应用于物流过程中高度差之间的货物输送、传递等,如与流水线、专用设备等配套使用;货物装卸;大型设备举升等,不同的工况要求可选择不同的台面形式(如:滚轴、滚珠、转盘等)。
产品承载量大、行程范围广、安全高效,是现代工业提高工效之必备。
可移动式液压升降台是在原升降台的工作基础之上,将移动装置与升降台配合使用,摆脱了过去升降台固定不动的模式,使升降台实现货物或原料的快速装卸,不仅提高了升降台的工作效率,同时可以使升降台不再受工作场地的限制,扩大了升降台的使用范围。
同时在控制系统上使用电气控制,用简单的接触器、开关等,控制升降台的起动、停止、上升、下降等工作步骤,方便,快捷,大大的节省了人力,提高了生产效率,因此在工厂等生产单位得到了广泛的应用。
在本设计中,分别从升降台,移动装置,控制装置三个方面着手研究。
升降台的设计部分,着重对升降台的机构分析,机构设计,液压缸的选择以及各重要部件的强度进行了详细的计算和准确的校核;移动装置部分,主要是对装置的的传动设计的选择以及传动件的强度与刚度进行了深入的分析;控制部分则主要对控制系统的原理进行了详细的阐述。
1 绪论1.1 设计的主要目的本课题主要完成的是一放线机升降结构设计,包括线圈夹紧.升降机构,实现线圈的夹紧.装卸操作。
该放线机用于计算机通讯线缆或类似线缆的裁切的自动供料,以保证线缆切线长度。
1.2 设计的主要思路设计研究的主要思路就是想把传统的螺旋式升降改为液压升降,这样就可以大大的节省人力物力,而且也能精准的完成机械的自由升降。
以便更好的使用放线机。
本人的想法是想用液压驱动不想用陈规的螺杆升降,要解决这些问题必须解决升降系统和驱动系统,在常规的螺杆升降的前提下,要提升很大重量到指定高度是非常困难的,这样会大大的降低工作效率,所以选用液压升降会大大节省人力物力,还有就是因为刚卷质量非常大,单靠钢丝绳的拉力是远远不够的,想要正常的自由旋转就必须要有一个可靠的驱动系统,现在一般用的驱动系统都是电机驱动,因为它有许多优点,可以根据线卷的拉力大小来调节他的转速,还可以进行一般的正反转,还有就是在电机上安装一个变频器,可以无限调速,可以得到任何想要得转速。
驱动装置则是用液压驱动,它可以避免由于螺杆滑丝而引起的不必要的工程事故,而且力大可以迅速提升到指定高度。
1.3 设计的要求1.夹紧只限于轴向,线绕度不受限制,夹紧力不致使线轴破坏。
2.驱动力可采取外驱动力。
3升降过程要求平稳.快捷。
4.放线时线圈外径悬空高度200mm—400mm。
5.线圈形状尺寸示于图1.1图1.1 线卷的零件图1.4 放线机发展情况综述科学的发展越来越要求精确的技术,以此同时我们还不能以牺牲效率为代价。
现在线路的应用越来越多,相应各种线的切割,也越来越多,这就要求我们有一种设备既有很高的效率又能保证精度要求。
所以我们来研究放线机有很好的经济很社会效益。
现阶段我国在各项技术中一直处于先进水平,在一些领域还保持着领先。
一种应用于钢帘线及高精度、高性能金属线材生产的现代化关键设备——25模多功能智能化高速水箱拉丝机,由江苏泰隆机械集团研制成功,并于4月9日通过了科技成果鉴定。
液压升降作业平台自主设计与分析液压升降作业平台是一种用于提升工人,设备和材料至不同高度的设备。
它可以在物流、制造、工业和建筑等行业中使用。
本文介绍了液压升降作业平台的自主设计和分析。
一、设计要求1、负载能力:具有足够的负载能力,能够承载工人、设备和材料。
2、提升高度:能够提升至拟定高度,以便工人和物品到达安全的工作高度。
3、稳定性:必需具有稳定性,以免发生意外伤害和损害。
4、安全控制:对于人员和物品的安全需要有恰当的安全控制,如电气和液压系统的安全控制。
5、便携性:便于移动和存储,且满足空间和需求的限制,以便在数量有限的区域内使用。
二、结构设计液压升降作业平台主要由升降机构、承载结构和电气系统组成。
1、升降机构:升降机构由液压缸和液压泵组成,液体从泵通过管道进入缸中,从而让升降平台从底部上升到合适的高度。
2、承载结构:承载结构包括底部和平台的框架和支架。
底部框架是一个稳定的结构,其支撑着升降平台。
平台框架由较粗厚的管道组成,其大小和形状取决于平台的负载能力和框架强度。
3、电气系统:液压升降作业平台的电气系统包括开关、电线和电器等各种元件。
开关控制泵的一切行动,而电线和电器则保证了整个系统的操作和缺陷。
在任何情况下,必须为操作员和平台提供足够的安全保护。
三、分析1、液压系统:液压系统是液压升降作业平台中最重要的部分。
其液压缸必须能够承受平台的负载,并应保证其在运行过程中不发生的意外事故。
2、拉力:设计平台时必须知道平台的拉力,以便在运行时对其进行控制并确保其安全。
3、水平性:液压升降作业平台必须非常平稳,以便不损坏设备或损坏来往的人员。
为了达到此目的,必须在底部框架中放置平衡器。
4、驱动力:必须为液压升降作业平台指定适当的驱动力。
5、电气控制:液压升降作业平台的控制电气系统必须安全,可靠且易于使用。
四、总结:液压升降作业平台的设计和分析需要考虑到其多方面的要求和功能。
设计时需要考虑到平台的负载能力、控制、稳定性和便携性等因素,并确保液压系统、电气系统和承载结构恰当地支持平台的运作。
摘要基于UG移动式可倾斜升降平台的运动仿真长期以来升降平台的研制一直采用传统的方法,它的生产周期长,物理样机制造成本高,而且当产品制出后,经常会出现部件、零部件之间相互干涉,而无法装配等问题。
本文介绍了应用美国公司UG软件进行升降平台单体虚拟制造和运动仿真的过程。
利用UG对建立的升降平台单体的各零部件三维实体模型进行约束和连接装配,形成升降平台单体整体装配,然后通过软件UG进行运动仿真,仿真结果表明,可以利用该仿真平台对升降平台进行性能和结构设计分析,这种方法提高了升降平台设计的效率和准确性,具有一定的实用价值,为将来样机实验奠定了基础。
关键词:虚拟样机技术;UG仿真;升降平台Abstract:Since long ago the elevator development always uses traditional the method, its production cycle is long, the physical prototype production cost is high, moreover after product generating, can appear between frequently the part, the spare part interferes mutually, but is unable to assemble and so on the questions. This article introduced software carries on the elevator monomer hypothesized manufacture and the movement simulation process using American UG.. Carries on the restraint and the connection assembly using GU to the establishment elevator monomer various spare parts three dimensional full-scale mockup, forms the elevator monomer whole assembly, then inducts through connection software UG to carry on the movement simulation, the simulation result indicated, This method enhanced the efficiency and the accuracy which the precision planter designs, has certain practical value, will be the future prototype experiment has laid the foundation.Key word:Virtual prototyping; UG simulation ; Elevat目录目录 (I)1. 国内外升降台的发展形势 (1)1.1国外升降台的发展形势 (1)1.2国内升降台的发展形势 (2)1.3 课题研究的目的意义及主要内容 (3)1.3.1 课题研究的目的意义 (3)1.3.2 课题研究的主要内容 (3)2 剪叉式升降台的应用及其受力分析的讨论 (3)2.1剪叉式升降平台的三种结构形式 (3)2.2 水平固定式剪叉式升降平台机构的位置参数计算 (4)2.3水平固定式剪叉式升降平台机构的动力参数计 (6)2.4 针对性比较小实例: (6)2.5水平固定式剪叉式升降平台机构中两种液压缸布置方式的分析 (7)2.5.1问题的提出: (7)2.5.2两种布置方式的分析和比较: (8)2.5.3实例计算 (9)3液压传动系统的设计计算 (10)3.1制定液压系统的基本方案 (10)3.1.1确定液压执行元件的形式 (10)3.1.2 确定液压缸的类型 (11)3.2.3 缸盖联接的类型 (11)3.2.4拟订液压执行元件运动控制回路 (11)3.2.5液压源系统 (11)3.3确定液压系统的主要参数 (12)3.3.1载荷的组成与计算: (12)3.3.2计算液压缸的主要结构尺寸 (13)3.3.3管道尺寸的确定 (15)3.4液压缸主要零件结构、材料及技术要求 (16)3.4.1缸体 (16)3.4.2活塞 (16)3.4.3液压缸安装联接部分的型式及尺寸 (17)3.4.4绘制液压系统原理图 (18)4台板与叉杆的设计计算 (20)4.1确定叉杆的结构材料及尺寸 (20)4.2横轴的选取 (22)5 剪式升降台基于UG三维虚拟制造与运动仿真 (24)5.1 建模 (24)5.1.1支撑杆 (24)5.1.2长横杆 (24)5.1.3短横杆 (25)5.1.4液压缸 (25)5.1.5活塞 (25)5.1.6平台 (26)5.1.7机座 (26)5.2 装配 (27)5.3 仿真 (27)5.3.1工作表 (27)5.3.2运动曲线 (28)5.3.3创建连杆 (28)5.3.4创建运动副 (28)6 剪叉式液压升降台数学模型的建立 (29)6.1 剪叉式液压升降台简介 (29)6.2 升降台的模块划分 (30)6.3 升降台数学模型分析 (30)6.3.1虚位移原理 (30)6.3.2单杆的运动分析 (31)6.3.3Ⅱ级杆组的运动分析 (32)6.3.4有源组的运动分析 (33)结论 (35)致谢 (36)参考文献 (37)附录 (39)1. 国内外升降台的发展形势1.1国外升降台的发展形势对垂直运送的需求与人类的文明一样久远,最早的升降平台使用人力、畜力和水力来提升重量。
液压升降作业平台自主设计与分析液压升降作业平台是一种常见的工业装备,被广泛应用于各种高空作业、装卸货物等场合。
本文旨在对液压升降作业平台进行自主设计与分析,以提高其工作效率、工作安全以及使用寿命。
设计方案液压升降作业平台的主要组成部分包括底座、升降机构、扶手、操作盘等。
其中,底座主要用于支撑整个平台,升降机构用于实现升降操作,扶手用于提供人员安全保障,操作盘用于控制平台的升降及操作。
在设计升降机构时,需要考虑其升降高度、升降速度、负载能力等因素。
一般来说,液压升降作业平台的升降高度从3米到20米不等,升降速度也在0.06~0.2m/s之间。
在升降机构的选择方面,应根据实际需要选择相应的液压缸、油泵等零部件,以确保平台的升降操作顺利,并保证平台的负载能力。
在设计扶手时,应考虑其高度、稳定性等特点。
一般来说,扶手的高度为平台高度的一半左右,以便提供适当的抓握力。
此外,在扶手的设计中还需要注意其稳固性,以保护操作人员的安全。
在操作盘的设计中,应有明确的指示标志,以便操作人员正确地掌握升降机构的动作。
操作盘应放置在易于触碰的地方,并配有必要的安全防护装置,以确保操作人员的安全。
分析液压升降作业平台在使用过程中容易受到各种因素的影响,例如:天气、环境、使用方式等。
因此,需要针对这些因素对平台进行相应的分析,并采取相应的措施以提高其使用寿命和安全性。
首先,需要对液压升降作业平台的负载能力进行分析。
在使用平台时,应根据实际负载情况进行评估,以确保平台的负载不超过其承载能力。
如果负载过大,会对平台的液压系统、结构等造成不可逆的影响,可能会导致整个平台失效,甚至出现重大安全事故。
其次,需要对平台的机构及系统进行常规维护。
平台的液压系统、传动系统等组成部分在长时间使用中会出现磨损、齿轮松动等问题,因此需要定期进行检查和保养,以确保其正常运行。
在维护过程中,还应对平台的液压油进行更换和检测,以保证其良好的润滑性和清洁度。
液压升降作业平台自主设计与分析【摘要】本文主要围绕液压升降作业平台的自主设计与分析展开研究。
在首先介绍了背景信息,明确了液压升降作业平台在工程领域的重要性和应用需求;明确了研究的目的,即设计一种性能稳定、安全可靠的液压升降作业平台;并阐述了研究方法与理论基础。
在分别介绍了液压升降作业平台的设计原理、液压系统的组成与工作原理分析、平台结构设计与参数选择、液压系统的稳定性分析以及安全性评估。
在给出了设计优化建议,展望未来研究方向,并总结了液压升降作业平台自主设计与分析的主要成果和实际意义。
通过本文的研究,有望为液压升降作业平台的设计与应用提供有益的参考和指导。
【关键词】液压升降作业平台、自主设计、分析、设计原理、系统组成、工作原理、平台结构、参数选择、稳定性分析、安全性评估、设计优化、未来研究展望、结论总结。
1. 引言1.1 背景介绍液压升降作业平台是一种广泛应用于工业生产、仓储以及建筑等领域的重要设备。
它能够实现对工作人员进行升降作业,提高工作效率,减轻劳动强度,同时也提高了工作的安全性和稳定性。
随着工业自动化水平的不断提升,液压升降作业平台的设计与研究也日益受到重视。
传统的液压升降作业平台设计多为仿制或简单改进,存在一定的局限性和不足。
自主设计并进行深入分析成为提高液压升降作业平台性能和适用性的关键。
本文旨在通过对液压升降作业平台的设计原理、液压系统组成与工作原理、平台结构设计和参数选择、液压系统的稳定性分析以及安全性评估等方面进行深入研究,提出设计优化建议,展望未来研究方向,为液压升降作业平台的改进和应用提供理论支持和参考。
1.2 研究目的研究目的是为了解决液压升降作业平台设计中存在的问题,提高其性能和稳定性,确保安全性和可靠性。
通过深入分析液压升降作业平台的设计原理、液压系统的工作原理和平台结构设计,以及液压系统的稳定性和安全性评估,旨在为液压升降作业平台的自主设计提供有效的指导和优化建议。
液压升降机毕业设计|液压升降台设计论文毕业设计(论文)(说明书)题目:液压升降机设计姓名:编号:XX职业技术学院年月日 XX职业技术学院毕业设计(论文)任务书姓名专业任务下达日期年月日设计(论文)开始日期年月日设计(论文)完成日期年月日设计(论文)题目:A.编制设计B.设计专题(毕业论文)指导教师系(部)主任年月日 XX职业技术学院毕业设计(论文)答辩委员会记录系专业,学生于年月日进行了毕业设计(论文)答辩。
设计题目:专题(论文)题目:指导老师:答辩委员会根据学生提交的毕业设计(论文)材料,根据学生答辩情况,经答辩委员会讨论评定,给予学生毕业设计(论文)成绩为。
答辩委员会人,出席人答辩委员会主任(签字):答辩委员会副主任(签字):答辩委员会委员:,,,,,, XX职业技术学院毕业设计(论文)评语第页共页学生姓名:专业年级毕业设计(论文)题目:评阅人:指导教师:(签字)年月日成绩:系(科)主任:(签字)年月日毕业设计(论文)及答辩评语:液压升降机设计摘要本次设计的题目是液压升降机的设计,它主要包括:主机械机构的设计,液压系统的设计,控制部分的设计三个部分内容。
在本设计中将液压系统的设计做为主要内容进行设计。
液压系统的设计又主要包括了动力源,控制元,执行元,辅助元的设计。
液压升降机主要是通过液压油的压力传动从而实现升降的功能,它的剪叉机械结构,使升降机有较高的稳定性,宽大的作业平台和较高的承载能力,使高空作业范围更大,并适合多人同时作业,它使高空作业效率更高,安全更可靠。
液压升降机广泛适用于汽车、集装箱、模具制造,木材加工,化工灌装等各类工业企业及生产流水线,满足不同作业高度的升降需求,同时可配装各类台面形式(如滚珠、滚筒、转盘、转向、倾翻、伸缩),配合各种控制方式(分动、联动、防爆),具有升降平稳准确、频繁启动、载重量大等特点,有效解决工业企业中各类升降作业难点,使生产作业轻松自如。
关键字:升降机,液压系统,液压元目录摘要....................................................... ..............1第一章升降机的发展情况 (4)1.1升降机在生产和生活中的作用和意义 (4)1.2升降机国内外的研究发展情况 (5)1.2.1国内发展情况 (5)1.2.2世界升降机发展状况和发展趋向....................................5 第二章升降机的工艺参数和工况分析 (6)2.1 升降机的工艺参数 (6)2.2升降机工况分析 (6)第三章升降机机械机构的设计和计算 (7)3.1 升降机机械结构形式和运动机理 (7)3.1.1 机械结构型式 (7)3.1.2 升降机的运动机理....................................................... (8)3.2 升降机的机械结构和零设计 (9)3.2.1 升降机结构参数的选择和确定 (9)3.2.2 升降机支架和下底板结构的确定 (14)第四章液压系统的设计要求 (14)第五章液压系统方案的选用 (14)5.1油路循环方式的分析和选择 (15)5.2开式系统油路组合方式的分析选择 (16)5.3调速方案的选择 (16)5.4液压系统原理图的确定 (16)第六章液压元的选用....................................................... .206.1 油泵和电机选择....................................................... ......20 6.1.1泵的额定流量和额定压力 (20)6.1.2 电机功率的确定....................................................... ....216.1.3 联轴器的选用.............................................................................................21 6.2 控制阀的选用....................................................... .........24 6.2.1 压力控制阀....................................................... (24)6.2.2 流量控制阀....................................................... (25)6.2.3 方向控制阀....................................................... .. (25)6.3 管路,过滤器,其他辅助元的选择计算 (26)6.3.1 管路....................................................... (26)6.3.2 过滤器的选择....................................................... (27)6.3.3 辅的选择....................................................... (28)6.4 液压元的连接....................................................... ......28 6.4.1 液压装置的总体布置....................................................... .286.4.2液压元的连接....................................................... ......29 6.5 油箱及附....................................................... ..30 6.5.1 油箱的容积....................................................... .........30 6.5.2 按使用情况确定油箱容积. (30)6.5.3 按系统发热和散热计算确定油箱容量 (3)1第七章液压缸的选用 (34)7.1 缸筒....................................................... . (34)7.1.1 缸筒与缸盖的连接形式 (3)47.1.2 强度计算....................................................... . (35)7.1.3缸筒材料及加工要求....................................................... ..367.1.4 缸盖材料及加工要求....................................................... .377.2活塞和活塞杆....................................................... (37)7.2.1 活塞和活塞杆的结构形式 (37)7.2.2 活塞、活塞杆材料及加工要求 (38)7.3活塞杆导向套....................................................... .......39 7.4 进出油口尺寸的确定....................................................... 39 7.5 密封结构的设计选择....................................................... 39 第八章液压泵站的选用.................................................33 8.1 液压泵站的组成及分类.. (33)8.2 液压泵站的选用....................................................... .....33 第九章液压系统性能验算...............................................40 参考文献....................................................... . (43)致谢....................................................... (44)第1章升降机的发展情况1.1 升降机在生产和生活中的作用和意义液压升降机不论是在工业生产还是我们的日常生活中都有着重要的作用。
升降机构毕业论文标题:升降机构在现代建筑中的应用探讨摘要:随着现代建筑技术的不断发展,升降机构在建筑物的设计和使用中扮演着至关重要的角色。
本论文旨在探讨升降机构在现代建筑中的应用,并分析其在提升建筑性能、改善人们生活质量等方面的影响。
通过对相关数据和案例的分析研究,我们得出了升降机构在现代建筑中的重要性,并提出一些建议以进一步提高其应用。
这将对未来建筑设计和升降机构的发展具有指导意义。
关键词:升降机构;现代建筑;建筑性能;生活质量引言:升降机作为一种垂直交通工具,被广泛应用于现代建筑中。
它不仅为人们提供了便利的垂直交通方式,同时也在建筑设计中发挥着重要的作用。
本文旨在研究并分析升降机在现代建筑中的应用,探讨其对建筑性能和人们生活质量的影响,在实践中为建筑设计提供有益的启示。
一、升降机在现代建筑中的应用升降机是指一种能够垂直上下运动的提升装置,其应用在现代建筑中主要有以下几个方面:1. 垂直交通方式的改进:升降机为建筑物提供了快速、方便、安全的垂直交通方式,使得人们能够在建筑物内部自由穿梭,并将不同楼层建筑有机地连接起来。
2. 建筑物空间利用的提高:升降机的应用使得建筑物内部空间更加灵活,能够更好地满足不同层次的需求。
它可以通过改变运行方式、设计垂直交通节点等方式,有效地提高建筑物内部空间的利用率。
3. 建筑性能的提升:升降机在现代建筑中扮演着重要的角色,可以显著提升建筑物的性能。
它可以有效延长建筑物的使用寿命,减少人们的上下楼梯的时间和劳动强度,并满足特殊人群的需求,如老年人和残疾人等。
二、升降机对建筑性能的影响升降机在现代建筑中的应用不仅提供了垂直交通的便利,同时还对建筑性能产生了积极的影响。
以下是升降机对建筑性能的影响:1. 提高建筑的使用效率:升降机节省了人们在建筑物内上下楼梯的时间和劳力,提高了建筑物的使用效率。
尤其是在高层建筑中,升降机成为人们进出的主要交通方式,大大提高了建筑的可用性和灵活性。
1 绪论1.1 设计的主要目的本课题主要完成的是一放线机升降结构设计,包括线圈夹紧.升降机构,实现线圈的夹紧.装卸操作。
该放线机用于计算机通讯线缆或类似线缆的裁切的自动供料,以保证线缆切线长度。
1.2 设计的主要思路设计研究的主要思路就是想把传统的螺旋式升降改为液压升降,这样就可以大大的节省人力物力,而且也能精准的完成机械的自由升降。
以便更好的使用放线机。
本人的想法是想用液压驱动不想用陈规的螺杆升降,要解决这些问题必须解决升降系统和驱动系统,在常规的螺杆升降的前提下,要提升很大重量到指定高度是非常困难的,这样会大大的降低工作效率,所以选用液压升降会大大节省人力物力,还有就是因为刚卷质量非常大,单靠钢丝绳的拉力是远远不够的,想要正常的自由旋转就必须要有一个可靠的驱动系统,现在一般用的驱动系统都是电机驱动,因为它有许多优点,可以根据线卷的拉力大小来调节他的转速,还可以进行一般的正反转,还有就是在电机上安装一个变频器,可以无限调速,可以得到任何想要得转速。
驱动装置则是用液压驱动,它可以避免由于螺杆滑丝而引起的不必要的工程事故,而且力大可以迅速提升到指定高度。
1.3 设计的要求1.夹紧只限于轴向,线绕度不受限制,夹紧力不致使线轴破坏。
2.驱动力可采取外驱动力。
3升降过程要求平稳.快捷。
4.放线时线圈外径悬空高度200mm—400mm。
5.线圈形状尺寸示于图1.1图1.1 线卷的零件图1.4 放线机发展情况综述科学的发展越来越要求精确的技术,以此同时我们还不能以牺牲效率为代价。
现在线路的应用越来越多,相应各种线的切割,也越来越多,这就要求我们有一种设备既有很高的效率又能保证精度要求。
所以我们来研究放线机有很好的经济很社会效益。
现阶段我国在各项技术中一直处于先进水平,在一些领域还保持着领先。
一种应用于钢帘线及高精度、高性能金属线材生产的现代化关键设备——25模多功能智能化高速水箱拉丝机,由江苏泰隆机械集团研制成功,并于4月9日通过了科技成果鉴定。
1.平台升降机构的总体设计1.1概述平台升降机构是用来实现货物升降的工作机构,它是起重机械中不可缺少的部分,是起重机最重要的机构,其工作性能的优劣将直接影响起重机的技术性能。
起升机构一般由驱动装置,传动装置,制动装置,卷绕系统,取物装置以及安全辅助装置等组成。
在起重量较大的起重机中,常设有两个或多个不同起重量的升降机构,其中起重量最大的为主起升机构,其余为副起升机构。
平台起升降机构一般应满足下列要求:1.平台升降机构设计和选型应符合买方文件规定的工作级别或规范标准的规定。
2.平台升降机构的驱动装置一般设置在机器房内,各部件安装在具有足够强度和刚性的共用的底架上。
底架再与机器房钢结构固定。
3.驱动装置的各传动轴同心度应是可调的,当轴同心度出现很小的偏差时可通过底盘和机座之间的调整垫片进行适当调整。
4.传动装置的支座应有足够的倾向刚度,以承受因钢丝绳偏斜产生的侧向力,保证盘式制动器正常工作。
5.钢丝绳工作时对卷筒绳槽的偏斜角一般不大于3.5°,对滑轮槽的偏斜角最大不大于5°。
6.在高速轴(减速器侧)和低速轴(卷筒轴侧)装设有可靠的制动器。
7.配置可靠的安全保护装置,包括高度指示器和限位保护,超载保护,超速保护,挂舱保护架,对转动部件外侧应装设安全防护栏,在卷筒的下方应有接油盘,以防止污染环境。
8.满足标准或买方文件规定的噪声限制要求。
9.便于维修保养,留有足够的维修保养空间和通道。
10.当电气系统发生故障时,应有将货物放置到地面或将吊具自舱内取出的措施。
1.2平台升降机构的组成和典型零部件的选型要求起升机构由驱动机构,钢丝绳卷绕系统,吊具和安全保护装置等组成。
驱动机构包括电动机,联轴器,制动器,卷筒,支承等部件。
安全保护装置除了高,低速级配备制动器外,还包括有各种行程限位开关,超速开关以及超负荷保护装置等。
1.2.1电机及其选型要求1.电机的特点:在平台升降机构上,驱动电机有交流和直流电机,过去多采用直流电机。
毕业论文----升降机设计引言1. 本计算仍然采用千牛顿-厘米-秒制,g取10。
其弹性模数对Q235钢取E=2.1×510MPa2. 本结构对钢结构采用极限状态计算方法。
在本计算中,下述状态均为极限状态。
①平衡铁和吊栏摔下。
②第一次安装30米,不附着,不拉懒风绳,即独立高度30米时:A)30年一过的合风下的非工作状态。
B)B级强风下,超载25%的工作状况。
③以后每次按高15米,即最高层附着以上的自由高度为20.5米,总高度105米时的工作和非工作状态。
3. 非工作状态的风载取10级狂风风压值的平均数440N/2m,并取风振系数1.5,从而计算风压取660N/2m;工m,他已相当于11级暴风风压的上限值664.2N/2作状况取6级强风风压值119N/2m和风振系数2.25,从而计算风压取268N/2m,他已相当于10级大风风压值的上限:267N/2m。
4. 工作载荷取一只吊栏超载25%对机架产生的弯矩和两只吊栏同时超载25%对机架产生的压力(弯矩为0),即最不利的情况计算,这种情形发生在一只吊栏停止另一只吊栏同时启动的瞬间。
如由一人操作,这种情形将不会发生。
5. 焊接件全部采用Q235钢的第一组材料,在极状态下,其许用应力值是:①抗拉,抗压,抗弯: {σ}=235N/2mm=235MPa②角焊缝:压,弯,剪:{σ}={τ}=160N/2mm=160MPa6. 对于Q235钢,在非极限状态下,许用应力的取值是:{σ}=140—160MPa,{τ}=100—120MPa,对角焊缝:{σ}={τ}=120MPa7. 本计算采用偏于安全的计算方法,为多处支撑,只按一处支撑查稳定系数。
8. 个别计算结果,应力值超过许用值,需要做具体分析,有的已经采取了加固措施,同时,多种极限状况,并不一定同时发生1. 整体设计1.1 整体构造示意图如图1.1:图1.1由一只主动轮和2只压紧轮组成牵引机,三根并列的钢丝绳5首断系在吊栏3上,经顶滑轮6,牵引机和顶滑轮后末端系在平衡铁4上。
升降平台毕业论文..第一篇:升降平台毕业论文..绪论1 绪论目前,升降平台广泛用于汽车、集装箱、模具制造,木材加工,化工灌装等各类工业企业及生产流水线,满足不同作业高度的升降需求,同时可配装各类台面形式(如滚珠、滚筒、转盘、转向、倾翻、伸缩),配合各种控制方式(分动、联动、防爆),具有升降平稳准确、频繁启动、载重量大等特点,有效解决工业企业中各类升降作业难点,使生产作业轻松自如。
如今的主要几种升降机构:按照升降平台构的不同分:剪叉式升降平台、升缩式升降平台、套筒式升降平台、升缩臂式升降平台、折臂式升降平台。
按移动的方法不同分:固定式升降平台、拖拉式升降平台、自行式升降平台、车载式升降平台、可驾驶式升降平台。
其中液压升降台,采用液压技术,升降平稳、噪音低。
垂直丝杠升降台采用丝杠传动方式,实现双层台面的升降,根据需要可多块组成升降台群,能在行程范围内组成不同的台阶,满足会议和演出的需要,是舞台上搭设亭、台、楼的理想道具。
水平丝杠升降台,该结构的升降台具有土建量小、所需基坑浅、行程大,运行平稳,噪音低定位准确、造价低等优点,采用水平丝杠传动,通过剪叉结构实线台面的升降运动,在行程范围内可任意停止。
链条式升降台具有良好的导向机构,保证设备运行时无倾斜。
齿轮齿条式升降台,传动精确,造价高。
螺旋器升降台具有普通升降台的全部功能,主要特点是设备占用基坑小,行程大。
设备高度仅200~500mm,行程可达14m。
当舞台建在2层以上的建筑物时,因空间受到限制时尤为适合。
本次设计的升降台是采用液压的驱动方式,它结构坚固,升降平稳,操作简单,维护方便等特点。
适用于仓库、机场、车站、工厂等需要搬运、装卸和高空作业的场所。
本设计的优点是:(1)利用国内外先进技术和成功经验,结合剪叉式液压升降台的具体使用要求,用最少的液压元件来实现单叉式液压升降台应具备的各种动作(如:起动、上升、下降、快降、停止等)。
1 装配升降定位系统工作状况分析(2)设计采用两片剪叉式机构,升降平稳,升降行程放大作用突出,结构简单可靠。
平台升降机构设计论文1.平台升降机构的总体设计1.1 概述平台升降机构是用来实现货物升降的工作机构它是起重机械中不可缺少的部分是起重机最重要的机构其工作性能的优劣将直接影响起重机的技术性能。
起升机构一般由驱动装置,传动装置,制动装置,卷绕系统,取物装置以及安全辅助装置等组成。
在起重量较大的起重机中,常设有两个或多个不同起重量的升降机构,其中起重量最大的为主起升机构,其余为副起升机构。
平台起升降机构一般应满足下列要求: 1.平台升降机构设计和选型应符合买方文件规定的工作级别或规范标准的规定。
2.平台升降机构的驱动装置一般设置在机器房内,各部件安装在具有足够强度和刚性的共用的底架上。
底架再与机器房钢结构固定。
3.驱动装置的各传动轴同心度应是可调的,当轴同心度出现很小的偏差时可通过底盘和机座之间的调整垫片进行适当调整。
4.传动装置的支座应有足够的倾向刚度,以承受因钢丝绳偏斜产生的侧向力,保证盘式制动器正常工作。
5.钢丝绳工作时对卷筒绳槽的偏斜角一般不大于 3.5?,对滑轮槽的偏斜角最大不大于 5?。
6.在高速轴(减速器侧)和低速轴(卷筒轴侧)装设有可靠的制动器。
7.配置可靠的安全保护装置,包括高度指示器和限位保护,超载保护,超速保护,挂舱保护架,对转动部件外侧应装设安全防护栏,在卷筒的下方应有接油盘,以防止污染环境。
8.满足标准或买方文件规定的噪声限制要求。
9.便于维修保养,留有足够的维修保养空间和通道。
10.当电气系统发生故障时,应有将货物放置到地面或将吊具自舱内取出的措施。
1.2 平台升降机构的组成和典型零部件的选型要求起升机构由驱动机构,钢丝绳卷绕系统,吊具和安全保护装置等组成。
驱动机构包括电动机,联轴器,制动器,卷筒,支承等部件。
安全保护装置除了高,低速级配备制动器外,还包括有各种行程限位开关,超速开关以及超负荷保护装置等。
1.2.1 电机及其选型要求 1.电机的特点:在平台升降机构上,驱动电机有交流和直流电机,过去多采用直流电机。
随着交流变频调速技术的进步,交流电机也逐步被采用。
考虑到起重机起升工况的特点和载荷特点,直流电机的过载能力一般都较大,并配有风机以保证起升电机的连续性的工作要求。
2.对起升机构电机的要求第一,良好的散热性能。
第二,如采用直流电机,应有透明板,以方便检查碳刷和整流子。
第三,对相对湿度大的场所,内部配加热器,配有过热报警和断电保护装置。
第四,对于在高温环境下作业的,应选用F级绝缘。
第五,在室内安装的起升电机,其保护等级不低于IP23在室外应达到IP54。
第六,配有风机的电机上,应配有空气过滤器。
第七,所有电机应在短时间内具有规定力矩过载能力。
第八,风机在电机不用时,应有一可调的延时及断电功能。
1.2.2 制动器及其选型要求 1.制动器的作用:在平台升降机的各工作机构中,制动器是保证安全正常工作的重要部件。
在起升机构中必须装设可靠的制动器,以保证吊重能停止在空中。
变幅机构中的制动器使起重机臂架保持在一定位置。
运行机构与回转机构也需要用制动器使它们在一定的时间或一定的行程内停下来。
对于在露天工作或在斜坡上运行的平台升降机,制动器还有防止风力吹动或下滑的作用。
某些平台升降机起升机构还利用制动器来使物品按所要求的速度下降。
2.制动器的选型原则。
为了保证门机高速,高效和安全可靠地工作,制动器选择应遵循下列原则; 第一,起升机构应采用常闭式制动器,制动器的安全系数应不小于1.75。
若安装两个以上制动器,则每个制动器的安全系数应大于1.25。
第二,最大限度减小安装在高速轴上的制动器的飞轮矩,以利起升机构电机能迅速启动达到额定速度运行。
第三,高速轴上的制动器应安装在减速器轴端,而不是电机轴上,保证制动安全可靠。
同时为了使机构布置紧凑,应力求轴向尺寸最小。
第四,制动器应有磨损自动补偿装置和备有手动释放装置,以作释放松闸用。
第五,制动器在振动,噪音,防松,防锈,防潮,防盐雾和不同环境温度等方面均应满足规范和买方文件的要求。
1.2.3 减速器及其选型要求 1.起升减速器通常采用卧式减速器,通常采用为平行轴式,水平剖分,底座安装,箱体为钢板焊接,齿轮全部为渗碳淬火硬齿面并磨齿。
2.箱体应有足够的刚度,以保证受载后产生的变形不影响齿轮啮合。
3.良好的润滑和散热条件,保证在持续工作下的温升不超过规定的温度,一般不超过 70?。
4.便于维修保养,如放油彻底,加油方便,有检查探视孔和长时间不工作时放出积水的设施,带过滤器以及与大气想通的呼吸器。
5.减速器的配置,一般按照起升机构布置型式可采用一台或两台减速器。
1.2.4 联轴器及其选型要求 1.高可靠性。
普遍采用齿形联轴器或梅花型联轴器。
蛇形联轴器因疲劳被剪断后将会产生危险后果,在起升机构中已不采用。
2.易于调整其同心度。
3. 工作过程中,在外载荷作用下由于机架的变形使联轴器产生径向平面角度偏差,应使由此产生的磨安装时保证足够的精度,其静态的同心度偏差不能超过规定要求。
1.2.5 损最小。
4.安全限位开关和超负荷限制器 1.凸轮式行程限位开关或脉冲编码器和离心式超速开关,一般直接连接到卷筒输出轴上,或安装在减速器低速轴端,以提供起升卷筒速度控制,减速和停止信号,以及行程的上限和下限保护和超速保护,并连续提供起升高度位置信号。
2.为防止货物落地后起升绳过度松弛,必须设有起升松绳限位设置。
该限位开关一般设置在起升卷筒钢丝绳出绳下端,有时设置在吊具上架的滑轮轴下部。
1.3 起升机构的方案设计1.3.1 设计参数根据此次的设计要求,设计参数如下:起重量:Q4000kg吊钩 ;作业) 起升高度:H15m; V1 起升速度: m min ; M5,工作级别: JC20。
本平台升降机构使用变频电机在不同频率下的两种电机额定转速,来实现不同工况下的两种起升速度。
因此,对整个起升机构而言,只需要选用一套驱动机构和一套卷绕系统。
1.3.2 卷绕系统平台升降机构的卷绕系统的设计主要与起升倍率有关。
起升机构滑轮组倍率的选定,对起升机构的总体尺寸影响较大。
倍率增大,则钢丝绳分支拉力减小,在起升速度不变时,需提高卷筒转速,即减小机构传动比。
但倍率过大,会使滑轮组本身体积和重量增大,同时也会降低效率,加速钢丝绳的磨损。
起重量小时,选用小的倍率,随着起重量增大,倍率相应提高。
倍率增大,起升速度相应减小。
本起升机构采用倍率m,2,钢丝绳缠绕情况如图 1 所示。
图 1 起升钢丝绳卷绕1.3.3 起升机构布置形式该起升机构由一组驱动装置和一组制动装置(两套)组成,在卷筒端部装有卷筒行程开关和超载限制器。
其起升机构传动如图 2 所示。
图2 起升机构传动简图1.3.4 卷筒组结构形式卷筒组用以收存钢丝绳,把电机的回转运动变为钢丝绳的直线运动,同时把驱动装置的驱动力传递给钢丝绳。
起重机上常用的卷筒组类型有齿轮连接盘式,周边大齿轮式,短轴式和内装行星齿轮式。
本起升机构采用短轴式卷筒组,其结构形式如图 3 所示。
图3 短轴式卷筒组2 平台升降机构设计计算2.1 钢丝绳的选型计算钢丝绳是广泛应用于起重机的挠性构件,它具有承载能力大卷绕性好,运动无噪音,极少出现断裂,工作可靠等优点。
1.钢丝绳最大静拉力计算: 因为吊具的选择与工作时的货物重有很大关系,根据设计要求以及查表得吊具的重量: Q 0 2.0Q1 2.0 400080kg (2—1) 该次设计采用双联滑轮组,钢丝绳的最大静拉力为: 1 0 2 z (2—2) m1 Q1 Q 0 1 Smax (2—3) 2m z 1 2 3式中: Q1 —货物起重量; Q 0 —吊具重量; m —滑轮组倍率,为 2;—滑轮效率,采用滚动轴承, 0.98 ,查表1;z —滑轮组效率,也可以通过查表 1; 1 2 3 —导向滑轮效率, 2 3 0.985 ,与工作级别有关,此次设计中工作级别为 M5,是由查表 2 和查表 3 得。
表 1 滑轮组效率滑轮组效率z 滑轮效率滑轮组倍率 m 2 3 4 5 6 8 10滚动轴 0.98 0.99 0.98 0.97 0.960.95 0.93 0.92 承滑动轴 0.96 0.98 0.95 0.93 0.9 0.88 0.84 0.86 承表2 轮绳直径比系数机构工作级别轮绳直径比例系数 e M4 18 M5 20 M6 22.4 M725 M8 28 表 3 与e D 有关的值 d D/d 12 14 16 18 20 30 0.96 0.97 0.9750.98 0.985 0.99所以得: 1 0 2 1 - 0.982 z 0.99 m1 2 1 - 0.98 Q1 Q 0 1 10 0.25 9800 1 Smax 26.543KN 2 m z 1 2 32 2 0.99 0.985 0.985 0.985 2.按安全系数选择钢丝绳直径: 根据设计要求工作级别为 M5,查表 4,取钢丝绳安全系数为:n 5 ;破断拉力: F 0 S n 26.5435 132.715 KN ; D6×19-18.5-18000 一特右交选取钢丝绳型号: GB1102—74 其中钢丝绳的公称抗拉强度为 1550 N ;钢丝绳破断拉力总和 mm 2 S 189.5KN ,查参考资料1P202 可得。
3.校核安全系数: 实际安全系数: n 7.1 。
所以符合要求。
S S max 表4 C和n值选择系数 C 值机构工作级别钢丝公称抗拉强度MPa 安全系数 n 1550 1700 1850 M4 0.099 0.095 0.091 4.5 M5 0.104 0.10.096 5 M6 0.114 0.109 0.106 6 M70.123 0.118 0.113 7 M8 0.14 0.134 0.128 92.2 卷筒设计的相关参数2.2.1 卷筒的几何尺寸 1.卷筒形式:单层双联卷筒,见图 4: 图4 单层双联卷筒 2.卷筒基本尺寸: 卷筒槽底(名义)直径 D : D e 1d (2—5)式中: D —卷筒名义直径;d —钢丝绳直径;e —筒绳直径比,与工作级别有关,此次设计中工作级别要求是M5,查e 18 。
所以得: D 18 1 17.5 297.5mm 。
初选 D 为 350mm。
采用标表 2 可得准槽形式,槽的关系参数计算如下: 绳槽半径:R 0.53 0.56d 9.275 9.8mm (2—6) 所以绳槽半径取: R 9.5mm 绳槽节距: P d 2 4mm 19.5 21.5mm (2—7) 所以绳槽节距取: P 20mm H max m 卷筒上有螺旋部分长: 0 L Z 1 P (2—8) D 0式中: L0 —卷筒上有旋转部分长; H max —最大起升高度; m —滑轮组倍率, m 2 ;D 0 D d 350 17.5 367.5mm —卷筒计算直径,由钢丝绳中心算起的卷筒直径: Z 11.5 —固定钢绳的安全圈数,取 Z 1 2 。