船舶静止在波浪上的外力计算
- 格式:doc
- 大小:116.50 KB
- 文档页数:4
船舶阻力数值计算1.船体阻力的计算船体阻力是船舶行驶时由于水的粘性作用在船体表面产生的阻力。
常用的方法有几种,其中一种是波尔根公式:R=К*S*V²其中,R表示船体阻力,К为波尔根系数,S为船体湿表面积,V为船舶的航行速度。
2.波浪阻力的计算波浪阻力是船舶行驶时由于船体在海水中的波浪作用下产生的阻力。
波浪阻力一般可以通过计算波浪幅度的方法来获得,其中较为常用的是费尔康普公式:R_wave = К_wave * ρ * g * A_wave * L / 2其中,R_wave表示波浪阻力,К_wave为波浪阻力系数,ρ为水密度,g为重力加速度,A_wave为波浪振幅,L为船长。
3.粘性阻力的计算粘性阻力是由于水分子的粘性作用在船体周围产生的阻力。
根据流体力学的相关理论,可以通过雷诺数来计算粘性阻力。
一种常用的计算方法是维塔公式:R_viscous = К_viscous * μ * V * S / L其中,R_viscous表示粘性阻力,К_viscous为粘性阻力系数,μ为水的黏度,S为船体湿表面积,L为船长。
4.附加阻力的计算附加阻力是由于船舶与船艏、船尾以及侧板、船舶结构等水流非均匀情况下的相互作用而产生的阻力。
附加阻力的计算比较复杂,常常需要通过模型试验或者计算流体力学模拟方法来进行。
其中一种常用的方法是简化模型试验法,通过对一系列模型试验的数据进行曲线拟合,得到附加阻力的数学模型。
总结起来,船舶阻力数值的计算是一个相对复杂的过程,需要考虑船体阻力、波浪阻力、粘性阻力和附加阻力等多个方面。
这些阻力的计算方法也是不同的,从经验公式到数值模拟等各种方法都有。
在实际计算中,需要根据船舶的具体情况选择合适的计算方法,并结合实测数据或者试验数据进行验证,以保证计算结果的准确性和可靠性。
船舶稳性计算公式船舶稳性是指船舶在水中运行时,保持平衡和稳定的能力。
稳定性是船舶设计中非常重要的一个方面,它关系到船舶的安全性和航行性能。
船舶稳性计算公式是用来评估船舶在不同条件下的稳性情况的数学公式,通过这些公式可以计算出船舶在不同条件下的稳性参数,从而为船舶设计和运行提供参考依据。
船舶稳性计算公式的基本原理是基于阿基米德原理和力学平衡原理,通过计算船舶的浮力、重力和倾覆力矩等参数来评估船舶的稳定性。
在船舶设计和运行中,稳性计算公式被广泛应用于评估船舶的稳性情况,为船舶设计师和船舶操作人员提供了重要的参考数据。
船舶稳性计算公式涉及到许多参数,其中包括船舶的尺寸、形状、重心位置、载重情况、浸水线、气压和海况等因素。
根据这些参数,可以得出船舶的稳性曲线、倾覆角、倾覆力矩、倾覆力臂等稳性参数,从而评估船舶在不同条件下的稳定性。
船舶稳性计算公式的具体形式和计算方法根据不同的稳性理论和方法而有所不同。
在船舶设计中,常用的稳性计算方法包括静态稳性计算、动态稳性计算、气动稳性计算和波浪稳性计算等。
每种方法都有相应的计算公式和计算程序,可以用来评估船舶在不同条件下的稳性情况。
静态稳性计算是指在平静水面上,船舶在静止状态下的稳性情况。
常用的静态稳性计算公式包括浮力计算公式、重心位置计算公式、倾覆力矩计算公式等。
通过这些公式可以计算出船舶在不同载重情况下的浮力和重心位置,从而评估船舶的稳定性。
动态稳性计算是指在船舶运行时,船舶在动态条件下的稳性情况。
常用的动态稳性计算公式包括倾覆角计算公式、倾覆力矩计算公式、倾覆力臂计算公式等。
通过这些公式可以评估船舶在不同航行状态下的稳定性,为船舶操作人员提供重要的参考数据。
气动稳性计算是指在强风条件下,船舶在风力作用下的稳性情况。
常用的气动稳性计算公式包括风压力计算公式、风倾覆力矩计算公式等。
通过这些公式可以评估船舶在强风条件下的稳定性,为船舶设计师和船舶操作人员提供重要的参考数据。
船受海水的压强计算公式海洋是地球上最广阔的水域,其深远的影响不仅体现在自然界的生态系统中,也对人类社会产生着重要的影响。
船舶作为海上交通的重要工具,其在海水中受到的压强是一个重要的物理参数。
本文将以船受海水的压强计算公式为标题,探讨船舶在海水中受到的压强以及其计算公式。
首先,我们来了解一下船舶在海水中受到的压强是什么。
海水是一种流体,对于任何浸入其中的物体都会施加压力。
船舶在海水中浮沉,受到的压强主要来自两个方面,一是来自海水的静压力,即海水对船舶表面产生的压力;二是来自海水的动压力,即船舶在航行过程中受到的水流压力。
这些压力会对船体结构产生影响,因此对船舶受到的压强进行计算是非常重要的。
接下来,我们来看一下船受海水的压强计算公式。
根据流体静力学的原理,海水对船舶表面的压强可以通过以下公式进行计算:P = ρgh。
其中,P表示海水对船舶表面的压强,单位为帕斯卡(Pa);ρ表示海水的密度,单位为千克/立方米(kg/m³);g表示重力加速度,单位为米/秒²(m/s²);h 表示海水的深度,单位为米(m)。
这个公式说明了海水对船舶表面的压强与海水的密度、重力加速度以及海水的深度有关。
在实际应用中,可以通过这个公式计算出船舶在不同深度的海水中受到的压强,从而为船体结构设计提供参考依据。
除了静压力,船舶在航行过程中还会受到来自海水的动压力。
动压力的计算公式与静压力有所不同,其计算公式如下:P = 0.5ρv²。
其中,P表示海水对船舶表面的动压力,单位为帕斯卡(Pa);ρ表示海水的密度,单位为千克/立方米(kg/m³);v表示船舶在水中的速度,单位为米/秒(m/s)。
这个公式说明了海水对船舶表面的动压力与海水的密度以及船舶在水中的速度有关。
在船舶设计和船舶性能评估中,需要考虑船舶在航行过程中受到的动压力,从而合理设计船体结构和提高船舶航行性能。
综上所述,船舶在海水中受到的压强是一个重要的物理参数,其计算公式可以通过流体静力学和流体动力学的原理进行推导。
船舶阻力与船速的计算公式船舶阻力与船速的计算公式是船舶设计和航行中非常重要的内容。
船舶阻力是指船舶在航行中受到的水流、风力和波浪等外部力量的阻碍,是决定船舶动力系统设计和船舶性能的重要因素之一。
船舶的阻力与船速之间存在着密切的关系,通过计算可以得到船舶在不同航速下的阻力大小,为船舶设计和航行提供重要的参考依据。
船舶阻力的计算公式可以分为静水阻力和波浪阻力两部分。
静水阻力是指船舶在静止状态下受到的水流阻力,主要与船体的形状和湿表面积有关;波浪阻力是指船舶在航行中受到的波浪阻力,主要与船舶航行速度和波浪形态有关。
下面我们将分别介绍船舶静水阻力和波浪阻力的计算公式。
静水阻力的计算公式通常采用法国工程师Froude提出的Froude公式,即:\[ R = k \times S \times V^2 \]其中,R为静水阻力,k为阻力系数,S为湿表面积,V为船舶航行速度。
阻力系数k是与船舶的形状和流体粘度等因素相关的常数,可以通过实验或经验公式进行确定。
湿表面积S是指船舶在水中的受潮表面积,通常可以通过船舶的几何形状参数计算得到。
船舶的航行速度V是指船舶相对于水流的速度,是静水阻力的一个重要影响因素。
通过Froude公式可以得到船舶在不同航速下的静水阻力大小,为船舶设计和性能分析提供了重要的参考数据。
波浪阻力的计算公式通常采用Holtrop提出的Holtrop公式,即:\[ R_{w} = 0.5 \times \rho \times g \times C_{1} \times A_{T} \times B_{L} \times \left( 1 + k_{B} \times \left( 1.0 C_{B} \right) \right) \times C_{B} \times S \times\left( 1 + 0.35 \times \left( \frac{B_{L}}{T} \right) \right) \times \left( 1 C_{F} \right) \times \left( 1 \frac{C_{F}}{C_{F} + 1} \right) \times \left( 1 \frac{C_{F}}{C_{F} + 2} \right) \times \left( 1 \frac{C_{F}}{C_{F} + 3} \right) \times C_{F} \times V^2 \]其中,\( R_{w} \)为波浪阻力,\( \rho \)为水的密度,g为重力加速度,\( C_{1} \)为修正系数,\( A_{T} \)为横截面积系数,\( B_{L} \)为船舶长度与波长的比值,\( k_{B} \)为波浪系数,\( C_{B} \)为方形系数,S为湿表面积,\( T \)为船舶吃水深度,\( C_{F} \)为摩擦系数,V为船舶航行速度。
船舶动力相关公式船舶动力是指船舶在水中航行和操纵时所需的动力。
船舶动力涉及到船舶的推进力、抗阻力和操纵力等方面。
以下是一些船舶动力相关的公式。
1.推进力公式:推进力是指船舶在水中前进所受到的力。
推进力的大小取决于船舶的推进装置和船舶周围水流的影响。
常见的推进力公式如下:F=ρ*A*V^2*C其中,F表示推进力,ρ表示水的密度,A表示推进装置产生的有效推力面积,V表示船舶的速度,C表示推力系数。
2.抗阻力公式:抗阻力是指船舶在水中航行时所受到的水阻力。
抗阻力的大小取决于船舶的速度、船体形状、湍流阻力等因素。
常见的抗阻力公式如下:F=0.5*ρ*A*V^2*Cd其中,F表示抗阻力,ρ表示水的密度,A表示船舶的参考面积,V表示船舶的速度,Cd表示阻力系数。
3.功率公式:船舶的推进力需要通过动力系统提供。
推进功率是指为产生船舶推进力所需的功率。
常见的功率公式如下:P=F*V=0.5*ρ*A*V^3*C其中,P表示推进功率,F表示推进力,V表示船舶速度。
4.推力系数公式:推力系数是表示推进装置产生的实际推力与理论推力之间的比值。
推力系数的大小取决于推进装置的效率以及船舶的运行状态。
常见的推力系数公式如下:Ct=T/(ρ*A*V^2)其中,Ct表示推力系数,T表示推进装置产生的推力。
5.螺旋桨效率公式:螺旋桨是最常用的船舶推进装置之一、螺旋桨效率是指螺旋桨转动时所产生的推力与所消耗的功率之比。
常见的螺旋桨效率公式如下:η=F*V/(P*n)其中,η表示螺旋桨效率,F表示推进力,V表示船舶速度,P表示推进功率,n表示螺旋桨的转速。
除了以上提及的公式,还有许多其他与船舶动力相关的公式,如舵角与操纵力的关系公式、船舶运动的动力学方程等,这里只列举了一部分常见的公式。
船舶动力的计算涉及到许多复杂的因素,需要综合考虑船舶的运行条件、船体特性以及推进装置的性能等因素,以获得准确的结果。
船舶受力计算书本文档旨在提供船舶受力计算的相关信息和方法。
船舶受力计算是船舶工程中一个重要的环节,它包括了船体结构和船舶系统所受到的各种力的计算和分析。
船舶受力计算的准确性对于船舶的设计、结构强度评估、安全性和可靠性的评估都具有重要意义。
船舶受力可以分为静力和动力两种类型。
静力受力是指船舶在静止或平稳航行状态下所受到的力。
常见的静力受力包括:浮力:船舶浮在水面上是由于浮力的存在。
浮力的大小取决于船舶的体积和浸没度。
重力:船舶所承受的自身重量。
尾流水动力:船舶在航行过程中产生的水流,会对船舶尾部产生一定的作用力。
动力受力是指船舶在航行过程中所受到的力。
主要包括:推进力:船舶通过推进系统产生的力,推动船舶前进。
惯性力:船舶在航行过程中的加速和减速会产生惯性力。
风力和浪力:船舶在航行过程中会受到风和浪所产生的力。
引力和摩擦力:船舶在靠岸或碰撞时所受到的力。
船舶受力计算需要根据特定的情况和船舶参数进行分析和计算。
常用的船舶受力计算方法有以下几种:经验公式法基于历史经验和试验数据,通过统计分析得出一些近似的公式,用以估计船舶在特定条件下所受到的力。
这种方法适用于快速估算和初步设计阶段。
计算机模拟法通过建立数学模型和模拟计算,对船舶受力进行准确的数值计算。
这种方法适用于需要更为精确的船舶受力计算和结构强度分析。
试验法通过在实际船舶上进行试验,测量和记录各种受力和应力数据,并进行分析和计算。
这种方法适用于验证计算结果和提供实际数据的情况。
船舶受力计算是船舶工程中的核心内容,通过准确计算和分析船舶受力,可以评估船舶结构的强度和可靠性,提高船舶的安全性。
在船舶设计和运营过程中,船舶受力计算是一个重要的环节,需要根据船舶的具体情况选择合适的计算方法,并结合实际情况进行综合分析。
船舶受力计算是船舶工程中的核心内容,通过准确计算和分析船舶受力,可以评估船舶结构的强度和可靠性,提高船舶的安全性。
在船舶设计和运营过程中,船舶受力计算是一个重要的环节,需要根据船舶的具体情况选择合适的计算方法,并结合实际情况进行综合分析。
船舶阻力数值计算船舶阻力是指船只在航行中遭受的水流阻碍而产生的阻力。
船舶阻力的准确计算对于设计船只的性能以及评估船只的能效至关重要。
船舶阻力数值计算涉及到多个复杂的参数和公式,下面将详细介绍船舶阻力数值计算的方法。
1.船舶几何参数的计算:船舶的外形和尺寸是计算阻力的基础。
常见的几何参数包括船舶的长、宽、吃水深度、型佳系数等。
这些参数可以根据船舶的设计图纸和规格手册获得。
2.黏性阻力的计算:黏性阻力是由于水流与船体表面接触而产生的阻力。
根据斯托克斯定律,黏性阻力与船体的湿表面积和黏度成正比。
黏性阻力可以通过计算湿表面积和黏度,然后使用相应的公式进行计算。
3.波浪阻力的计算:波浪阻力是由水流与船体产生的波浪相互作用而造成的阻力。
波浪阻力的计算可以通过船舶的速度和波浪参数来估算。
常见的波浪阻力计算方法包括亚当斯公式和法拉第公式等。
4.鲨鱼阻力的计算:鲨鱼阻力是由船体形状造成的额外阻力,主要是由于船头的凹型和船尾的凸型造成的。
鲨鱼阻力的计算需要基于船舶的几何参数和流体力学理论进行估算。
5.欠驱动阻力的计算:欠驱动阻力是指船舶在航行中由于推进力不足而导致的阻力。
欠驱动阻力的计算需要考虑船舶的推进力与阻力的平衡关系,通常使用航速-功率曲线进行计算。
6.其他阻力的计算:船舶在航行中还会受到其他因素的影响而产生额外的阻力,如侧风阻力、摩擦阻力等。
这些阻力可以通过合适的公式进行计算。
需要注意的是,船舶阻力的数值计算是一个复杂的过程,需要考虑多个因素的影响,如船舶的船型、航速、航线等。
在实际计算中,通常采用数值模拟或实验方法来获得更精确的结果。
综上所述,船舶阻力数值计算是一个复杂而关键的过程,需要考虑多个参数和公式。
准确计算船舶阻力有助于优化船舶的设计和提高船舶的能效,对于船舶工程和海洋工程领域具有重要意义。
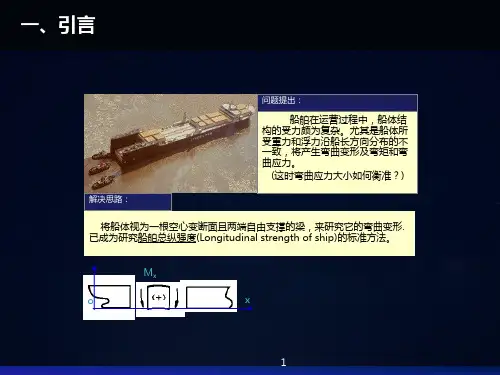
船舶静止在波浪上的外力计算一、整体计算过程(计算思路)两个假设:1、假设船舶以波速在波浪的前进方向上航行,即船与波的相对速度为零;2、假设船体是在重力和浮力作用下静平衡于波浪上的一根梁。
计算思路:1、船舶外力计算的目的是进行强度校核,应保证:[]max σσ≤其中,max σ为船体断面最大正应力,[]σ为许用应力。
2、应力计算根据梁的弯曲理论由下式给出:M Z Iσ=⋅ 其中,M 为计算断面的弯矩;I 为横断面绕水平中和轴的惯性矩;Z 为计算应力点到中和轴的距离。
3、船体梁在载荷作用下纵纵弯曲产生的弯矩有两部分构成:静水力弯矩和波浪附加弯矩:s M M M ω=+整体计算步骤:1、计算不同装载状态下静水弯矩和波浪附加弯矩以及静水剪力和波浪附加剪力;2、计算总纵弯矩;3、计算船体断面的最大正应力;4、根据许用应力进行强度校核。
波浪要素和装载状态:1、计算波浪附加弯矩时,标准波浪的波形取为坦谷波;2、应考虑四种装载状况:满载出港、到港,压载出港、到港二、各部分计算过程详解1、静水弯矩计算两个必要条件:1)船体浮力等于重力;2)重心和浮心在同一铅垂线 静水弯矩计算核心公式:()()()()()()()00x x q x x b x N x q x dx M x N x dx ω=-⎧=⎪⎨⎪=⎩⎰⎰ 静水力弯矩计算步骤:1) 绘制重量曲线;2) 绘制浮力曲线;3) 求出重量曲线和浮力曲线的差值()q x ,作为船体梁的载荷强度;4) 根据上面的公式计算静水弯矩。
重量曲线绘制方法:绘制重量曲线时,必须根据静力等效原则合理分布,满足以下四个要点:重量不变,重心不变,范围一致,均匀分布围长法:核心是假设船体结构单位长度重量与剖面围长成比例;抛物线法:核心是假定船体与舾装品总重量构成的重量曲线可以用抛物线和矩形之和来表示;梯形法:将船体重量近似地用梯形曲线表示;局部性重量:根据静力等效原则进行合理分布。
浮力曲线绘制方法:浮力曲线由邦戎曲线得出,由于船舶并非处于平浮状态,所以必须进行纵倾调整,调整方法为解析法和逐步近似法,其中逐步近似法计算过程: ● 按给出的平均吃水m d ,浮心纵向坐标b x ,水线面漂心f x 以及纵稳心半径R ,计算首尾吃水:22g b f m f g b a m f x x L d d x R x x L d d x R -⎫⎛⎫=+- ⎪⎪⎝⎭⎪⎬-⎛⎫⎪=-+ ⎪⎪⎝⎭⎭● 确定首尾吃水后,利用邦戎曲线求出对应吃水线时的浮力曲线,可计算出排水体积1V 和浮心纵向坐标1b x 的第一次近似值;● 将求的的两个数值与给定的排水体积0V 及重心纵向坐标g x 比较,相差较大时,必须作第二次近似计算,由下式确定新的首尾吃水:'01'0122g b fm f g b a m f x x V V L d d x A R x x V V L d d x A R -⎫-⎛⎫=++- ⎪⎪⎝⎭⎪⎬--⎛⎫⎪=+-+ ⎪⎪⎝⎭⎭ 校核误差在下式范围内时,即可停止近似计算,由邦戎曲线得出最终的浮力曲线:0.05%~0.01%g bx x L -≤在得出重量曲线和浮力曲线后,由重量曲线和浮力曲线之差得出载荷曲线,应满足以下性质:()()()()()()0000000L L L L L Lg b q x dx x dx b x dx W B xq x dx x x dx xb x dx W x B x ωω=-=-==-=⋅-⋅=⎰⎰⎰⎰⎰⎰2、波浪附加弯矩计算船舶在波浪中的浮力曲线()b x ω是由静水中的浮力曲线()s b x 与波浪中由吃水变化引起的浮力变化量()b x ∆之和构成:()()()s b x b x b x ω=+∆船舶在波浪中的浮力变化量必须满足下列两式:()()0000LL b x dx x b x dx ⎫∆=⎪⎬⎪⋅∆=⎭⎰⎰ 船舶在波浪中的附加弯矩可以得出: ()()()()()0000xx x x N x b x dxM x N x dx b x dxdx ωωω⎫=-∆⎪⎬⎪==-∆⎭⎰⎰⎰⎰ 由于坦谷波波形因素,船舶在波浪中要有一定的下沉或上升,距尾垂线x 下沉量由下式给出: 0x x ζζψ=+⋅利用麦卡尔法,基于船侧直壁假设,可以得出:Bi Ai Ci Ai i Ai i ωωωωωωζε-=+∆=+⋅ ()0Bi Ai Ci Ai i x ωωωωζψε-=+⋅+ 根据以上条件,即可以得出波浪中附加弯矩的计算式:()()()()000xx x N x x dxM x x dxdx ωωγωγω⎫=-∆⎪⎬⎪=-∆⎭⎰⎰⎰ 3、总纵弯矩计算及强度校核将静水弯矩和波浪附加弯矩之和记作总纵弯矩,再由应力校核公式进行强度校核: s M M M ω=+[]max σσ≤。
船舶阻力数值计算船舶阻力是指在船舶运行中所受到的阻碍和抵抗的力量。
船舶阻力的计算对于船舶的设计、性能评估、节能减排等方面都具有重要的意义。
下面将介绍船舶阻力数值计算的一般方法。
船舶阻力由以下几个主要部分组成:摩擦阻力、波浪阻力和附加阻力。
摩擦阻力是由于船舶与水之间的直接接触产生的阻力,包括湿表面的摩擦阻力和水线周长(长、中、短取平均值)抗操纵阻力。
摩擦阻力可以根据庞德尔船舶阻力公式进行计算,其中摩擦阻力与湿表面积的平方根成正比,与速度的平方成正比。
波浪阻力是由于船体在航行过程中引起的波浪形成的阻力。
波浪阻力可以通过里纳德船舶阻力公式进行计算,其中波浪阻力与船体湿表面积、速度的四次方、波浪系数和波浪高度的乘积成正比。
附加阻力是由于船舶晃动、涡流、压力分布不均匀等因素引起的附加阻力。
附加阻力可以通过经验公式进行估计,如ITTC-57、Holtrop等公式。
除了上述基本的阻力成分外,船舶还受到其他因素的影响,如纵浪阻力、侧浪阻力、浮船坞阻力、机械传动系统的阻力等。
这些因素的计算需要根据特定的船型和工况进行分析和评估。
船舶阻力的计算是一个复杂而多变的过程,需要考虑众多的参数和因素。
船舶阻力的数值计算可以通过模型试验、数值模拟或经验公式等方法进行。
其中,数值模拟方法如CFD(计算流体力学)模拟可以提供比较准确的结果,但计算时间和成本较高;经验公式方法则基于大量实际船舶的试航数据和统计分析,适用性较广。
总之,船舶阻力数值计算是船舶设计和性能评估的关键环节之一、通过合理准确地计算船舶阻力,可以为船舶的优化设计、节能减排等提供参考依据,并为船舶的性能预测和装备选型提供可靠的技术支持。
船舶静止在波浪上的外力计算
一、整体计算过程(计算思路)
两个假设:
1、假设船舶以波速在波浪的前进方向上航行,即船与波的相对速度为零;
2、假设船体是在重力和浮力作用下静平衡于波浪上的一根梁。
计算思路:
1、船舶外力计算的目的是进行强度校核,应保证:
[]max σσ≤
其中,max σ为船体断面最大正应力,[]σ为许用应力。
2、应力计算根据梁的弯曲理论由下式给出:
M Z I
σ=⋅ 其中,M 为计算断面的弯矩;I 为横断面绕水平中和轴的惯性矩;Z 为计算应力点到中和轴的距离。
3、船体梁在载荷作用下纵纵弯曲产生的弯矩有两部分构成:静水力弯矩和波浪附加弯矩:
s M M M ω=+
整体计算步骤:
1、计算不同装载状态下静水弯矩和波浪附加弯矩以及静水剪力和波浪附加剪力;
2、计算总纵弯矩;
3、计算船体断面的最大正应力;
4、根据许用应力进行强度校核。
波浪要素和装载状态:
1、计算波浪附加弯矩时,标准波浪的波形取为坦谷波;
2、应考虑四种装载状况:满载出港、到港,压载出港、到港
二、各部分计算过程详解
1、静水弯矩计算
两个必要条件:1)船体浮力等于重力;2)重心和浮心在同一铅垂线 静水弯矩计算核心公式:
()()()
()()()()00x x q x x b x N x q x dx M x N x dx ω=-⎧=⎪⎨⎪=⎩
⎰⎰ 静水力弯矩计算步骤:
1) 绘制重量曲线;
2) 绘制浮力曲线;
3) 求出重量曲线和浮力曲线的差值()q x ,作为船体梁的载荷强度;
4) 根据上面的公式计算静水弯矩。
重量曲线绘制方法:
绘制重量曲线时,必须根据静力等效原则合理分布,满足以下四个要点:重量不变,重心不变,范围一致,均匀分布
围长法:核心是假设船体结构单位长度重量与剖面围长成比例;
抛物线法:核心是假定船体与舾装品总重量构成的重量曲线可以用抛物线和矩形之和来表示;
梯形法:将船体重量近似地用梯形曲线表示;
局部性重量:根据静力等效原则进行合理分布。
浮力曲线绘制方法:
浮力曲线由邦戎曲线得出,由于船舶并非处于平浮状态,所以必须进行纵倾调整,调整方法为解析法和逐步近似法,其中逐步近似法计算过程: ● 按给出的平均吃水m d ,浮心纵向坐标b x ,水线面漂心f x 以及纵稳心半径R ,计算首尾吃水:
22g b f m f g b a m f x x L d d x R x x L d d x R -⎫⎛⎫=+- ⎪⎪⎝⎭⎪⎬-⎛⎫⎪=-+ ⎪⎪⎝⎭⎭
● 确定首尾吃水后,利用邦戎曲线求出对应吃水线时的浮力曲线,可计算出排水体积1V 和浮心纵向坐标1b x 的第一次近似值;
● 将求的的两个数值与给定的排水体积0V 及重心纵向坐标g x 比较,相差较大时,必须作第二次近似计算,由下式确定新的首尾吃水:
'01'0122g b f
m f g b a m f x x V V L d d x A R x x V V L d d x A R -⎫-⎛⎫=++- ⎪⎪⎝⎭⎪⎬--⎛⎫⎪=+-+ ⎪⎪⎝⎭⎭ 校核误差在下式范围内时,即可停止近似计算,由邦戎曲线得出最终的浮力
曲线:
0.05%~0.01%g b
x x L -≤
在得出重量曲线和浮力曲线后,由重量曲线和浮力曲线之差得出载荷曲线,应满足以下性质:
()()()()()()0000000
L L L L L L
g b q x dx x dx b x dx W B xq x dx x x dx xb x dx W x B x ωω=-=-==-=⋅-⋅=⎰⎰⎰⎰⎰⎰
2、波浪附加弯矩计算
船舶在波浪中的浮力曲线()b x ω是由静水中的浮力曲线()s b x 与波浪中由吃水变化引起的浮力变化量()b x ∆之和构成:
()()()s b x b x b x ω=+∆
船舶在波浪中的浮力变化量必须满足下列两式:
()()000
0L
L b x dx x b x dx ⎫∆=⎪⎬⎪⋅∆=⎭⎰⎰ 船舶在波浪中的附加弯矩可以得出: ()()()()()0000x
x x x N x b x dx
M x N x dx b x dxdx ωωω⎫=-∆⎪⎬⎪==-∆⎭⎰⎰⎰⎰ 由于坦谷波波形因素,船舶在波浪中要有一定的下沉或上升,距尾垂线x 下沉量由下式给出: 0x x ζζψ=+⋅
利用麦卡尔法,基于船侧直壁假设,可以得出:
Bi Ai Ci Ai i Ai i ωωωωωωζε
-=+∆=+⋅ ()0Bi Ai Ci Ai i x ωωωωζψε
-=+⋅+ 根据以上条件,即可以得出波浪中附加弯矩的计算式:
()()()()000x
x x N x x dx
M x x dxdx ωωγωγω⎫=-∆⎪⎬⎪=-∆⎭⎰⎰⎰ 3、总纵弯矩计算及强度校核
将静水弯矩和波浪附加弯矩之和记作总纵弯矩,再由应力校核公式进行强度校核: s M M M ω=+
[]max σσ≤。