捷联式姿态解算过程
- 格式:doc
- 大小:120.00 KB
- 文档页数:2
Pixhawk之姿态解算篇(1)_⼊门篇(DCMNomalize)⼀、开篇慢慢的、慢慢的、慢慢的就快要到飞控的主要部分了,飞控飞控就是所谓的飞⾏控制呗,⼀个是姿态解算⼀个是姿态控制,解算是解算,控制是控制,各⾃负责各⾃的任务。
我也不懂。
还在学习中~~~~近期看姿态预计部分看的太累了,明显发现基础知识太薄弱,什么欧拉⾓、DCM、四元数、gyro误差、矫正、正交化等各个概念。
然后就是各种转换公式。
接下来结合代码介绍⼀些主要的东西。
太深⼊的还不了解~~~⼀定要多看论⽂啊,英⽂版的论⽂(也没有中⽂的。
国⼈的悲哀啊)。
尽管看着头疼,看是看完了以后就会发现很多不了解的迷惑的就⾃然都解开了。
三、实验平台Software Version:ArduCopter(Ver_3.3)Hardware Version:pixhawkIDE:eclipse Juno (Windows)四、基本知识1、怎样实现控制⼀个⽆⼈机系统的算法主要有两类:姿态检測算法、姿态控制算法。
姿态控制、被控对象、姿态检測三个部分构成⼀个闭环控制系统。
被控对象的模型是由其物理系统决定,设计⽆⼈机的算法就是设计姿态控制算法、姿态检測算法。
1)姿态检測算法:姿态的表⽰能够⽤欧拉⾓,也能够⽤四元数。
姿态检測算法的作⽤就是将加速度计、陀螺仪等传感器的測量值解算成姿态,进⽽作为系统的反馈量。
在获取sensors值之前须要对数据进⾏滤波,滤波算法主要是将获取到的陀螺仪和加速度计的数据进⾏去噪声及融合,得出正确的⾓度数据(欧拉⾓或四元数),主要採⽤互补滤波或者⾼⼤上的卡尔曼滤波。
2)姿态控制算法:控制⽆⼈机姿态的三个⾃由度,⽤给定姿态与姿态检測算法得出的姿态偏差作为输⼊,被控对象模型的输⼊量作为输出(⽐如姿态增量),从⽽达到控制⽆⼈机姿态的作⽤。
最经常使⽤的就是PID控制及其各种PID扩展(分段、模糊等,我的毕设就是模糊PID控制算法,慘了,啥都不懂,还能毕业不,哎~~~),⾼端点的有⾃适应控制(⾃⼰主动壁障应该就⽤这个)。
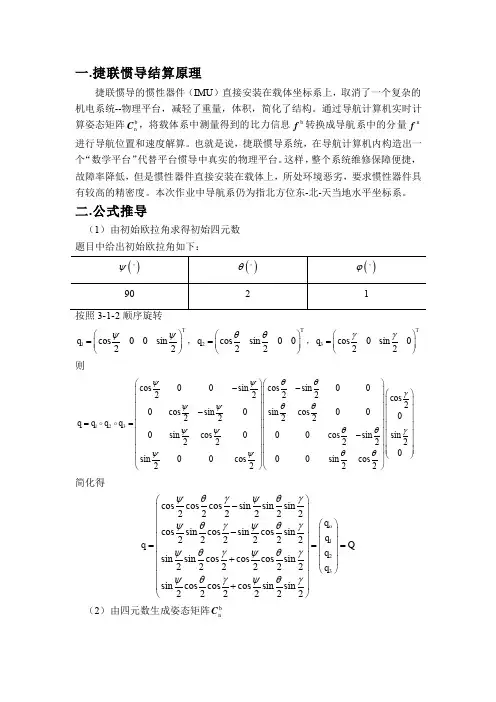
捷联惯性导航系统的解算方法捷联惯性导航系统(Inertial Navigation System,简称INS)是一种利用陀螺仪和加速度计等惯性测量单元测量物体的加速度和角速度,然后通过对这些测量值的积分计算出物体的速度和位置的导航系统。
INS广泛应用于航空航天、无人驾驶车辆和船舶等领域,具有高精度和自主性等特点。
INS的解算方法一般分为初始对准、运动状态估计和航位推算三个主要过程。
初始对准是指在启动导航系统时,通过利用外部辅助传感器(如GPS)或静态校准等方法将惯性传感器的输出与真实姿态和位置进行初次校准。
在初始对准过程中,需要获取传感器的初始偏差和初始姿态,一般采用标定或矩阵运算等方法进行。
运动状态估计是指根据惯性传感器的测量值,使用滤波算法对物体的加速度和角速度进行实时估计。
常用的滤波算法包括卡尔曼滤波、扩展卡尔曼滤波和粒子滤波等。
其中,卡尔曼滤波是一种最优估计算法,通过对观测值和状态进行线性组合,得到对真实状态的最佳估计。
扩展卡尔曼滤波则是基于卡尔曼滤波的非线性扩展,可以应用于非线性INS系统。
粒子滤波是一种利用蒙特卡洛采样技术进行状态估计的方法,适用于非高斯分布的状态估计问题。
航位推算是指根据运动状态估计的结果,对物体的速度和位置进行推算。
INS最基本的航位推算方法是利用加速度值对速度进行积分,然后再对速度进行积分得到位置。
但是,在实际应用中,由于传感器本身存在噪声和漂移等误差,导致航位推算过程会出现积分漂移现象。
为了解决这个问题,通常采用辅助传感器(如GPS)和地图等数据对INS的输出进行校正和修正。
当前,还有一些先进的INS解算方法被提出,如基于深度学习的INS 解算方法。
这些方法利用神经网络等深度学习模型,结合原始传感器数据进行端到端的学习和预测,以实现更高精度的位置和姿态估计。
综上所述,捷联惯性导航系统的解算方法主要包括初始对准、运动状态估计和航位推算三个过程。
其中,运动状态估计过程利用滤波算法对传感器的测量值进行处理,得到物体的加速度和角速度的估计。


%====本程序为捷联惯导的解算程序(由惯性器件的输出解算出飞行器的位置、速度、姿态信息)======clear all;close all;clc;deg_rad=pi/180; %由度转化成弧度rad_deg=180/pi; %由弧度转化成度%-------------------------------从源文件中读入数据----------------------------------fid_read=fopen('IMUout.txt','r'); %path1_Den.dat 是由轨迹发生器产生的数据[AllDataNumofAllData]=fscanf(fid_read,'%g %g %g %g %g %g %g %g %g %g %g %g %g %g %g %g',[17 inf]);AllData=AllData';NumofEachData=round(NumofAllData/17);Time=AllData(:,1);longitude=AllData(:,2); %经度单位:弧度latitude=AllData(:,3); %纬度单位:弧度High=AllData(:,4); %高度单位:米Ve=-AllData(:,6); % 东向、北向、天向速度单位:米/妙Vn=AllData(:,5);Vu=AllData(:,7);fb_x=AllData(:,9); %比力(fx,fy,fz)fb_y=AllData(:,8); %指向右机翼方向为x正方向,指向机头方向为y正向,z轴与x轴和y轴构成右手坐标系单位:米/秒2fb_z=-AllData(:,10); %右前上pitch=AllData(:,11); %俯仰角(向上为正)单位:弧度head=-AllData(:,13); %偏航角(偏西为正)roll=AllData(:,12); %滚转角(向右为正)omigax=AllData(:,15); %陀螺输出(单位:弧度/秒,坐标轴的定义与比力的相同)omigay=AllData(:,14);omigaz=-AllData(:,16);%-------------------------------程序初始化--------------------------------------latitude0=latitude(1);longitude0=longitude(1); %初始位置High0=High(1);Ve0=Ve(1);Vn0=Vn(1); %初始速度Vu0=Vu(1);pitch0=pitch(1);head0=head(1); %初始姿态roll0=roll(1);TimeEach=0.005; %周期和仿真总时间TimeAll=(NumofEachData-1)*TimeEach;Omega_ie=0.7292115147E-4;%0.00007272205216643040; %地球自转角速度单位:弧度每妙g0=9.78;%------------------------------导航解算开始--------------------------------------%假设没有初始对准误差pitch_err0=pitch0+0*deg_rad;head_err0=head0+0*deg_rad;roll_err0=roll0+0*deg_rad;%初始捷联矩阵的计算《捷联惯导系统》P63 旋转顺序 head - pitch - roll %导航坐标系n为东北天方向载体坐标系b为右前上偏航角北偏西为正Tbn(1,1)=cos(roll_err0)*cos(head_err0)-sin(roll_err0)*sin(pitch_err0) *sin(head_err0);Tbn(1,2)=cos(roll_err0)*sin(head_err0)+sin(roll_err0)*sin(pitch_err0) *cos(head_err0);Tbn(1,3)=-sin(roll_err0)*cos(pitch_err0);Tbn(2,1)=-cos(pitch_err0)*sin(head_err0);Tbn(2,2)=cos(pitch_err0)*cos(head_err0);Tbn(2,3)=sin(pitch_err0);Tbn(3,1)=sin(roll_err0)*cos(head_err0)+cos(roll_err0)*sin(pitch_err0) *sin(head_err0);Tbn(3,2)=sin(roll_err0)*sin(head_err0)-cos(roll_err0)*sin(pitch_err0) *cos(head_err0);Tbn(3,3)=cos(roll_err0)*cos(pitch_err0);Tnb=Tbn';%位置矩阵的初始化《捷联惯导系统》P46 其中游动方位角 a=0 假使初始经纬度确知Cne(1,1) = - sin(longitude0);Cne(1,2) = cos(longitude0);Cne(1,3) = 0;Cne(2,1) = - sin(latitude0) * cos(longitude0);Cne(2,2) = - sin(latitude0) * sin(longitude0);Cne(2,3) = cos(latitude0);Cne(3,1) = cos(latitude0) * cos(longitude0);Cne(3,2) = cos(latitude0) * sin(longitude0);Cne(3,3) = sin(latitude0);Cen=Cne';%初始四元数的确定《捷联惯导系统》 P151-152 方法本身保证了q1^2+q2^2+q3^2+q4^2=1q(2,1) = sqrt(abs(1.0 + Tnb(1,1) - Tnb(2,2) - Tnb(3,3))) / 2.0; q(3,1) = sqrt(abs(1.0 - Tnb(1,1) + Tnb(2,2) - Tnb(3,3))) / 2.0; q(4,1) = sqrt(abs(1.0 - Tnb(1,1) - Tnb(2,2) + Tnb(3,3))) / 2.0;q(1,1) = sqrt(abs(1.0 - q(2,1) ^2 - q(3,1) ^2 - q(4,1) ^2));% 判断q(1,1)的符号flag_q11=cos(head_err0/2.0)*cos(pitch_err0/2.0)*cos(roll_err0/2.0)-sin(head_err0/2.0)*sin(pitch_err0/2.0)*sin(roll_err0/2.0);if (flag_q11 >0) %此时q(1,1)取正if (Tnb(3,2) < Tnb(2,3))q(2,1) = - q(2,1);endif (Tnb(1,3) < Tnb(3,1))q(3,1) = - q(3,1);endif (Tnb(2,1) < Tnb(1,2))q(4,1) = - q(4,1);endelse %此时q(1,1)取负或0q(1,1) = - q(1,1);if (Tnb(3,2) > Tnb(2,3))q(2,1) = - q(2,1);endif (Tnb(1,3) > Tnb(3,1))q(3,1) = - q(3,1);endif (Tnb(2,1) > Tnb(1,2))q(4,1) = - q(4,1);endend%-------------------------迭代推算用到的参数的初始化------------------------Wiee_e = 0;Wiee_n = 0;Wiee_u = Omega_ie;Wiee = [Wiee_e Wiee_n Wiee_u]'; %地球速率在地球系中的投影东-北-天Lat_err(1)=latitude0;Lon_err(1)=longitude0;High_err(1)=High0;Ve_err(1)=Ve0;Vn_err(1)=Vn0;Vu_err(1)=Vu0;pitch_err(1)=pitch_err0;head_err(1)=head_err0;roll_err(1)=roll_err0;Re=6378137.0;%6378245.0; %地球长轴《惯性导航系统》 P28e=0.0033528106647474807198455286185206; %地球扁率精确值ee=0.00669437999014131699614;%----------------------------迭代推算开始-----------------------------------for i=1:NumofEachData%----------------------------惯性仪表数据的获得------------------------Wibb(1,1)=omigax(i); %指向右机翼方向为x正方向,指向机头方向为y正向,z轴与x轴和y轴构成右手坐标系Wibb(2,1)=omigay(i); %单位:弧度/妙Wibb(3,1)=omigaz(i); %右前上fb(1,1)=fb_x(i); %指向右机翼方向为x正方向,指向机头方向为y正向,z轴与x轴和y轴构成右手坐标系fb(2,1)=fb_y(i); %单位:米/秒2fb(3,1)=fb_z(i); %右前上%--------计算在姿态矩阵和位置矩阵更新时用到的参数------------------ RM=Re*(1.0-2.0*e+3.0*e*Cne(3,3)^2)+High_err(i); %《捷联惯导系统》P233 P235RN=Re*(1.0+e*Cne(3,3)^2)+High_err(i);% RN=Re*(1-ee)/(sqrt(1-ee*sin(Lat_err(i))))^3+High_err(i);% RM=Re/sqrt(1-ee*sin(Lat_err(i)))+High_err(i);%实验当地重力加速度计算《捷联惯导系统》P150 《惯性导航系统》 P35g=g0*((1.0+0.0052884*Cne(3,3)^2)-0.0000059*(1-(1-2*Cne(3,3)^2)^2))*(1 .0-2.0*High_err(i)/Re);tmp_slat=sin(Lat_err(i))*sin(Lat_err(i));Wien = Cne * Wiee; %地球速率在导航系中的投影Wenn(1,1) = -Vn_err(i)/RM;Wenn(2,1) = Ve_err(i)/RN; % <<惯性导航系统>> P45 考虑了地球转动的影响.Wenn(3,1) = Ve_err(i)*tan(Lat_err(i))/RN; %计算Wenn(不太精确),更新速度和位置矩阵时用Winn=Wien+Wenn;Winb=Tbn*Winn;Wnbb=Wibb-Winb; %姿态速率在姿态更新时用到fn=Tnb*fb; % x-y-z 东-北-天% 速度的更新《捷联惯导系统》 P30 33 东-北-天difVe_err=fn(1,1)+(2*Wien(3,1)+Wenn(3,1))*Vn_err(i)-(2*Wien(2,1)+Wenn (2,1))*Vu_err(i);difVn_err=fn(2,1)-(2*Wien(3,1)+Wenn(3,1))*Ve_err(i)+(2*Wien(1,1)+Wenn (1,1))*Vu_err(i);difVu_err=fn(3,1)+(2*Wien(2,1)+Wenn(2,1))*Ve_err(i)-(2*Wien(1,1)+Wenn (1,1))*Vn_err(i)-g;Ve_err(i+1)=Ve_err(i)+difVe_err*TimeEach;Vn_err(i+1)=Vn_err(i)+difVn_err*TimeEach;Vu_err(i+1)=Vu_err(i)+difVu_err*TimeEach;High_err(i+1)=High_err(i)+Vu_err(i)*TimeEach;% 位置矩阵的实时更新《惯性导航系统》 P190Cne(1,1)=Cne(1,1)+TimeEach*(Wenn(3,1)*Cne(2,1)-Wenn(2,1)*Cne(3,1)); Cne(1,2)=Cne(1,2)+TimeEach*(Wenn(3,1)*Cne(2,2)-Wenn(2,1)*Cne(3,2)); Cne(1,3)=Cne(1,3)+TimeEach*(Wenn(3,1)*Cne(2,3)-Wenn(2,1)*Cne(3,3)); Cne(2,1)=Cne(2,1)+TimeEach*(-Wenn(3,1)*Cne(1,1)+Wenn(1,1)*Cne(3,1)); Cne(2,2)=Cne(2,2)+TimeEach*(-Wenn(3,1)*Cne(1,2)+Wenn(1,1)*Cne(3,2)); Cne(2,3)=Cne(2,3)+TimeEach*(-Wenn(3,1)*Cne(1,3)+Wenn(1,1)*Cne(3,3)); Cne(3,1)=Cne(3,1)+TimeEach*(Wenn(2,1)*Cne(1,1)-Wenn(1,1)*Cne(2,1)); Cne(3,2)=Cne(3,2)+TimeEach*(Wenn(2,1)*Cne(1,2)-Wenn(1,1)*Cne(2,2)); Cne(3,3)=Cne(3,3)+TimeEach*(Wenn(2,1)*Cne(1,3)-Wenn(1,1)*Cne(2,3));% Mat_Wenn(1,1)=0;% Mat_Wenn(1,2)=Wenn(3,1);% Mat_Wenn(1,3)=-Wenn(2,1); %Wenn的反对阵矩阵取负% Mat_Wenn(2,1)=-Wenn(3,1); %这里位置矩阵的及时修正为:dCne/dt=Mat_Wenn*Cne% Mat_Wenn(2,2)=0;% Mat_Wenn(2,3)=Wenn(1,1);% Mat_Wenn(3,1)=Wenn(2,1);% Mat_Wenn(3,2)=-Wenn(1,1);% Mat_Wenn(3,3)=0;%% Mat_Wenn=Mat_Wenn*Cne*TimeEach;% Cne=Cne+Mat_Wenn;Cen=Cne';% 计算经纬度Lat_err(i+1)=asin(Cne(3,3));Lon_err(i+1)=atan(Cne(3,2)/Cne(3,1)); %这是经度的主值if (Cne(3,1) < 0)if (Lon_err(i+1) > 0)Lon_err(i+1) = Lon_err(i+1) - pi;elseLon_err(i+1) = Lon_err(i+1) + pi;endend% 四元数的及时修正《惯性导航系统》 P194% Mat_Wnbb=[ 0, -Wnbb(1,1), -Wnbb(2,1), -Wnbb(3,1); % Wnbb(1,1), 0, Wnbb(3,1), -Wnbb(2,1); % Wnbb(2,1), -Wnbb(3,1), 0, Wnbb(1,1); % Wnbb(3,1), Wnbb(2,1), -Wnbb(1,1), 0];% q=q+Mat_Wnbb*q*TimeEach/2.0;q(1,1)=q(1,1)+TimeEach*(-Wnbb(1,1)*q(2,1)-Wnbb(2,1)*q(3,1)-Wnbb(3,1)* q(4,1))/2.0;q(2,1)=q(2,1)+TimeEach*(Wnbb(1,1)*q(1,1)+Wnbb(3,1)*q(3,1)-Wnbb(2,1)*q (4,1))/2.0;q(3,1)=q(3,1)+TimeEach*(Wnbb(2,1)*q(1,1)-Wnbb(3,1)*q(2,1)+Wnbb(1,1)*q (4,1))/2.0;q(4,1)=q(4,1)+TimeEach*(Wnbb(3,1)*q(1,1)+Wnbb(2,1)*q(2,1)-Wnbb(1,1)*q (3,1))/2.0;% 四元数归一化处理q_norm=sqrt(sum(q.*q));q=q/q_norm;% 计算姿态矩阵 TnbTnb(1,1) = q(1,1) ^2 + q(2,1) ^2 - q(3,1)^2 - q(4,1)^2;Tnb(1,2) = 2.0 * (q(2,1) * q(3,1) - q(1,1) * q(4,1));Tnb(1,3) = 2.0 * (q(2,1) * q(4,1) + q(1,1) * q(3,1));Tnb(2,1) = 2.0 * (q(2,1) * q(3,1) + q(1,1) * q(4,1));Tnb(2,2) = q(1,1)^2 - q(2,1)^2 + q(3,1)^2 - q(4,1)^2;Tnb(2,3) = 2.0 * (q(3,1) * q(4,1) - q(1,1) * q(2,1));Tnb(3,1) = 2.0 * (q(2,1) * q(4,1) - q(1,1) * q(3,1));Tnb(3,2) = 2.0 * (q(3,1) * q(4,1) + q(1,1) * q(2,1));Tnb(3,3) = q(1,1)^2 - q(2,1)^2 - q(3,1)^2 + q(4,1)^2;Tbn=Tnb';flag_pitch=asin(Tnb(3,2));flag_roll=atan(-Tnb(3,1)/Tnb(3,3));flag_head=atan(-Tnb(1,2)/Tnb(2,2));if(Tnb(3,3)<0)if(flag_roll<0)flag_roll=flag_roll+pi;endif(flag_roll>0)flag_roll=flag_roll-pi;endend% 偏航角范围 -180度——180度北偏西为正if(Tnb(2,2)<0)if(flag_head<0)flag_head=flag_head+pi;endif(flag_head>0)flag_head=flag_head-pi;endend% 姿态角更新pitch_err(i+1)=flag_pitch;head_err(i+1)=flag_head;roll_err(i+1)=flag_roll;% 解算完毕由对准结果、陀螺、加表的输出解算出载体的位置、速度、姿态%----------------------计算解算误差------------------ddLat(i)=(Lat_err(i)-latitude(i))*rad_deg; %纬度误差单位:度ddLog(i)=(Lon_err(i)-longitude(i))*rad_deg; %经度误差单位:度ddHigh(i)=High_err(i)-High(i); %高度误差单位:米ddVe(i)=Ve_err(i)-Ve(i);ddVn(i)=Vn_err(i)-Vn(i); % 速度误差单位:米/妙2ddVu(i)=Vu_err(i)-Vu(i);ddpitch(i)=(pitch_err(i)-pitch(i))*rad_deg*3600; %姿态误差单位:度ddhead(i)=(head_err(i)-head(i))*rad_deg*3600;ddroll(i)=(roll_err(i)-roll(i))*rad_deg*3600;endfclose(fid_read);%---------------------------绘图开始--------------------------------- figure(1)plot(Time,ddLog)ylabel('经度误差(度)'),xlabel('时间(秒)');figure(2)plot(Time,ddLat)ylabel('纬度误差(度)'),xlabel('时间(秒)');figure(3)plot(Time,ddHigh);ylabel('高度误差(米)'),xlabel('时间(秒)');figure(4)plot(Time,ddhead)ylabel('偏航角误差(角妙)'),xlabel('时间(秒)'); figure(5)plot(Time,ddpitch)ylabel('俯仰角误差(角妙)'),xlabel('时间(秒'); figure(6)plot(Time,ddroll);ylabel('滚转角误差(角妙)'),xlabel('时间(秒)'); figure(7)plot(Time,ddVe);ylabel('东向速度误差(米/秒)'),xlabel('时间(秒)'); figure(8)plot(Time,ddVn)ylabel('北向速度误差(米/秒)'),xlabel('时间(秒)'); figure(9)plot(Time,ddVu)ylabel('天向速度误差(米/秒)'),xlabel('时间(秒)');%------------------------------绘图结束-------------------------------。

用四元数法的捷联惯性导航姿态解算程序close all;clear all;%重力产生的加速度矢量g=9.80142;%单位9.8m/s^2G=[0,0,-g]';%****************************读入数据%**********读入陀螺仪的数据gyro_x=load('gyrox.txt');gyro_y=load('gyroy.txt');gyro_z=load('gyroz.txt');%****************读入加速度计的数据**************%acc_rate=3/1024;acc_x =load('acceleratex.txt');acc_y =load('acceleratey.txt');acc_z=load('acceleratez.txt'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %加速度数字转换为模拟电压data_acc=[acc_x;acc_y;acc_z];data_acc=data_acc/1024*3%将数据转换为相应的加速度值%%*********************************************************%加速度计三个轴向的零点电压%zero_ax=?%zero_ay=?%zero_az=?%加速度计三个轴向的电压/加速度比值%rate_ax=? %单位是m/s^2/V%rate_ay=?%rate_az=?%acc_x=acc_x*acc_rate;%acc_y=acc_y*acc_rate;%acc_z=acc_z*acc_rate;aver_acc_x=mean(acc_x)aver_acc_y=mean(acc_y)aver_acc_z=mean(acc_z)%采样时间dtime=0.01;tm=0:dtime:0.01* (size(gyro_x,2)-1);%个数numn_point=size(gyro_x,2);%图1figureplot(tm,data_acc(1,:),'-',tm,data_acc(2,:),'.',tm,data_acc(3,:),'-.'); title('加速度计的采样曲线');legend('x_ACC','Y_ACC','Z_ACC');xlabel('Time / (10ms)');ylabel('Accelerate/ (m/s'')');grid on;%plot(tm,acc_x,'-',tm,acc_y,'.',tm,acc_z,'-.');%title('加速度的计的采样曲线'):%对采样曲线进行低通滤波a=[1,2,4,2,1];%gyro_x=filter(a/sum(a),1,gyro_x);%gyro_y=filter(a/sum(a),1,gyro_y);%gyro_z=filter(a/sum(a),1,gyro_z);%比例变换gyro_x=gyro_x/1024*3/0.6;gyro_y=gyro_y/1024*3/0.6;gyro_z=gyro_z/1024*3/0.6;%零点电压--陀螺仪,取前80个数的平均电压zero_gx=sum(gyro_x(1:80))/80zero_gy=sum(gyro_y(1:80))/80zero_gz=sum(gyro_z(1:80))/80%减去零点gyro_x=(gyro_x-zero_gx)/0.0125/180*pi; gyro_y=(gyro_y-zero_gy)/0.0125/180*pi; gyro_z=(gyro_z-zero_gz)/0.0125/180*pi;%gyro_x=(gyro_x-2.5)/0.0125/180*pi;%gyro_y=(gyro_y-2.5)/0.0125/180*pi;%gyro_z=(gyro_z-2.5)/0.0125/180*pi;%测试数据accelerate=zeros(3,n_point);accelerate(1,1:100)=10;accelerate(1,101:200)=-10;accelerate(1,201:300)=0;%陀螺仪数据gyro_x=zeros(1,n_point);gyro_y=zeros(1,n_point);gyro_z=zeros(1,n_point);gyro_z(1:100)=pi/3;gyro_z(101:200)=-pi/3;%重力轴始终有加速度accelerate(3,:)=accelerate(3,:)+9.8;figureplot(tm,accelerate(1,:),'-',tm,accelerate(2,:),'.',tm,accelerate(3,:),'-.');title('加速度计的采样曲线');legend('x_ACC','Y_ACC','Z_ACC');xlabel('Time / (10ms)');ylabel('Accelerate/ (m/s'')');grid on;%画出陀螺仪的采样曲线figureplot(tm,gyro_x,'r-',tm,gyro_y,'g.',tm,gyro_z,'b-.');title('陀螺仪的采样曲线');legend('x_Gyro','Y_Gyro','Z_Gyro');xlabel('Time / (10ms)');ylabel('Angel_rate/ (degree/s)');grid on;%size(gyro_x)%size(gyro_y)%size(gyro_z)data_gyro=[gyro_x;gyro_y;gyro_z];%转移矩阵--即方向余弦矩阵T=eye(3); %T是3*3的单位矩阵,初始转移矩阵%四元数矩阵,存储每步更新之后的四元数,方便以后绘图Q=zeros(4,n_point);%四元数的初始值确定,假定一开始导航坐标系与载体坐标系是重合的,因此方向余弦矩阵,是单位矩阵,利用它们之间的关系确定四元数的初始值。
捷联系统的四元数法姿态算法算法输入:物体的初始姿态,3轴陀螺仪不同时刻的Yaw,Pitch,Roll的角速度;算法输出:物体的当前姿态。
具体算法:1. 初始姿态的四元数(w,x,y,z)=(1,0,0,0) 命名为A2. 读取3轴陀螺仪当前时刻的Yaw,Pitch,Roll角速度,乘以上次计算以来的间隔时间,得到上一时刻以来(Yaw,Pitch,Roll)的变化量,命名为欧拉角b3. b是Tait-Bryan angle定义的欧拉角,将其转为四元数B4. A=A×B,做四元数乘法,即可得到当前姿态对应的新的四元数A5.重复2~4部,即可连续更新姿态6.将四元数A重新转换为Tait-Bryan angle形式的欧拉角a,就可以以直观的形式查看当前姿态核心算法1,欧拉角转四元数void Quaternion::FromEulerAngle(const EulerAngle &ea){float fCosHRoll = cos(ea.fRoll * .5f);float fSinHRoll = sin(ea.fRoll * .5f);float fCosHPitch = cos(ea.fPitch * .5f);float fSinHPitch = sin(ea.fPitch * .5f);float fCosHYaw = cos(ea.fYaw * .5f);float fSinHYaw = sin(ea.fYaw * .5f);w = fCosHRoll * fCosHPitch * fCosHYaw + fSinHRoll * fSinHPitch * fSinHYaw;x = fCosHRoll * fSinHPitch * fCosHYaw + fSinHRoll * fCosHPitch * fSinHYaw;y = fCosHRoll * fCosHPitch * fSinHYaw - fSinHRoll * fSinHPitch * fCosHYaw;z = fSinHRoll * fCosHPitch * fCosHYaw - fCosHRoll * fSinHPitch * fSinHYaw;}核心算法2,四元数转欧拉角EulerAngle Quaternion::ToEulerAngle() const{EulerAngle ea;ea.fRoll = atan2(2 * (w * z + x * y) , 1 - 2 * (z * z + x * x));ea.fPitch = asin(CLAMP(2 * (w * x - y * z) , -1.0f , 1.0f));ea.fYaw = atan2(2 * (w * y + z * x) , 1 - 2 * (x * x + y * y));return ea;}核心算法3,四元数乘法Quaternion Quaternion::Multiply(const Quaternion &b){Quaternion c;c.w=w*b.w -x*b.x -y*b.y -z*b.z;c.x=w*b.x +x*b.w +y*b.z -z*b.y;c.y=w*b.y -x*b.z +y*b.w +z*b.x;c.z=w*b.z +x*b.y -y*b.x +z*b.w;c.Normalize();return c;}次要的规范化算法:void Quaternion::Normalize(){float s=getS();w/=s;x/=s;y/=s;z/=s;}float Quaternion::getS(){return sqrt(w*w+x*x+y*y+z*z);}我的loop函数,算法的集成部分:Quaternion nowQ;void loop() {int intx, inty,intz;float pitch,roll,yaw;gyro.ReadGyroOutCalibrated_Radian(&pitch, &roll, &yaw); EulerAngle dt;dt.fRoll=roll;dt.fPitch=pitch;dt.fYaw=-yaw;Quaternion dQ;dQ.FromEulerAngle(dt);nowQ=nowQ.Multiply(dQ);count++;if (count>1000){EulerAngle nowG=nowQ.ToEulerAngle();Serial.print(nowG.fRoll/3.1415926535*180,11);//横滚Serial.print(",");Serial.print(nowG.fPitch/3.1415926535*180,11);//俯仰Serial.print(",");Serial.print(nowG.fYaw/3.1415926535*180,11);//偏航Serial.print(",");Serial.print(nowQ.getS(),11);//偏航Serial.println();count=0;}}四元数与欧拉角之间的转换在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。
捷联式惯性导航积分算法设计上篇:姿态算法Paul G. SavageStrapdown Associates, Inc., Maple Plain, Minnesota55359摘要:本论文分上下两篇,用于给现代捷联惯导系统的主要软件算法设计提供一个严密的综合方法:将角速率积分成姿态角,将加速度变换或积分成速度以及将速度积分成位置。
该算法是用两速修正法构成的,而两速修正法是具有一定创新程度的新颖算法,是为姿态修正而开发出来的,在姿态修正中,以中速运用精密解读方程去校正积分参数(姿态、速度或位置>,其输入是由在参数修正(姿态锥化修正、速度摇橹修正以及高分辨率位置螺旋修正>时间间隔内计算运动角速度和加速度的高速算法提供的。
该设计方法考虑了通过捷联系统惯性传感器对角速度或比力加速度所进行的测量以及用于姿态基准和矢量速度积分的导航系旋转问题。
本论文上篇定义了捷联惯导积分函数的总体设计要求,并开发出了用于姿态修正算法的方向余弦法和四元数法;下篇着重讨论速度和位置积分算法的设计。
尽管上下两篇讨论中常常涉及到基本的惯性导航概念,然而,本论文是为那些已对基础惯导概念很熟悉的实际工作者而写的。
专门用语:123,,,A A A A =任意坐标系12A A C =将矢量从2A 坐标系投影到1A 坐标系的方向余弦矩阵 I =单位矩阵12A A q =从2A 坐标系投影到1A 坐标系的旋转矢量所构成的姿态变化四元数 1*2A A q =12A A q 的共轭四元数,它的第1项与12A A q 的首项相同,余下的2~4项与 12A A q 的互为相反数 1q =单位四元数,它的第1项为1,其余3项为0V =无具体坐标系定义的矢量A V =列向量,它的各项元素等于矢量V 在坐标系A 的各轴上的投影A V ⨯() =向量AV 的反对称<或交叉积)形式,代表如下矩阵:000ZA YA ZA XA YAXAV V V V V V -⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦其中:XA V ,YA V ,ZA V 是AV 的分量,AV ⨯()与A 系矢量的矩阵乘积等于AV 与该矢量的叉积A q V =与A V 等量的四元数矢量,0A V ⎡⎤⎢⎥⎣⎦2A ω1A =2A 坐标系相对于1A 坐标系的角速率,当1A 为惯性系<I 系)时,2A ω1A 是由安装在2A 坐标系上的角速率传感器所测到的角速率1.概论惯性导航是通过对速度积分得到位置并对总加速度积分得到速度的过程。
(1)加速度记测得载体相对惯性空间比力b ib a ,经过误差补偿之后的b
ib a 经过姿态矩阵n b C 的变换得到n ib a :n n b ib b ib =C a a
将n ib a 进行误差补偿之后通过积分运算得到速度分量n en V 。
n en V 一方面作
为系统的输出,一方面作为输入用来求解位置角速率n en W 。
(2)陀螺仪测得载体相对惯性空间角速率b i b W , 首先通过速度分量n en V 求得位移角速率n en W ,因为n eny W =0,
n
enx n eny W W ⎡⎤⎢⎥⎢⎥⎣⎦=22yt xt 22y yt xt yt t x x t t sin cos ()R R sin cos R 11sin cos R R 11sin cos R R R αααααααα⎡⎤
-⎢⎥⎢⎥⎢⎥⎢⎥
-⎢⎥⎣-++⎦
-()()n x n y V V ⎡⎤
⎢⎥⎢⎥⎣⎦
这样就根据陀螺仪测得的角速率b i b W ,上面所求得的位移角速率n
en W ,
加上已知的地球角速率e i e W 来求的姿态角速率b n b W 。
b b n b n e i e n i e n e i e W =C W =C C W 且 b b n e n n e n W =C W b b b b n b i b i e e n W =W W W --=b i b W b n e n n e i e e n C C W +W -()。
然后根据姿态角速率利用四元数微分方程求出四元数中的元素a,b,c,d.
四元数描述了一个坐标系或一个矢量相对某一个坐标系的旋转。
a 是标量部分表示了转角的一半余弦值,b ,c ,d 是矢量部分表示瞬时转轴的方向,瞬时转动轴与参考坐标系轴间方向的余弦值。
表达式A=a+bi+cj+dk 。
四元数微分方程:.
b
n b A =1/2AW
..x
..001/200b
b b
nbx nby
nbz
b b b nb nbz
nby
b b b nby
nbz
nbx
b b b nbz nby
nbz
a w w w a w w w
b b w w w
c c w w w
d d ⎡⎤⎢⎥⎡⎤---⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦
⎣⎦⎢⎥⎣⎦
这样求出四元数中a ,b ,c ,d 四个元数。
这里的四元数是用来描述载体坐标系相对游动方位坐标系的转动,即:
2222
b n 2222
n b 2222n b x x a b c d 2bc ad 2bd+ac y =2bc+ad a b c d 2cd-ab y 2bd ab 2cd+ab a -b -c d z z ⎡⎤+---⎡⎤
⎡⎤⎢⎥⎢⎥⎢⎥-+-⎢⎥⎢⎥⎢⎥⎢⎥⎢
⎥⎢⎥-+⎣⎦⎣⎦⎣⎦()
()(
)()(
)()
这样就可方向余弦矩阵与四元数姿态矩阵是完全等效的,即
2222
n 2222
b 2222a b
c
d 2bc ad 2bd+ac C =2bc+ad a b c d 2cd-ab 2bd ab 2cd+ab a -b -c d ⎡⎤
+---⎢⎥
-+-⎢
⎥⎢⎥-+⎣⎦
()()()()(
)
()
而n b cos sin sin cos sin cos cos sin sin cos sin s sin sin sin C =sin sin in cos cos sin sin cos sin cos co sin s sin cos cos γψγθψ
θψγψγθψγψγθψθψγψγθψγθθ
γθ-⎡⎤
⎢⎥⎢⎥⎢⎥-⎣
+⎦
-+-
这样利用姿
态矩阵和四元数中各对应项相等的原则得出姿态矩阵中的各个元素,然后就能求出姿态参数,即三个姿态角航向角ψ、俯仰角θ、滚转角γ。