柱坐标系与球坐标系简介
- 格式:ppt
- 大小:1.22 MB
- 文档页数:35
四柱坐标系与球坐标系简介1.柱坐标系(1)定义:建立空间直角坐标系Oxyz .设P 是空间任意一点,它在Oxy 平面上的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面Oxy 上的极坐标,这时点P 的位置可用有序数组(ρ,θ,z )(z ∈R)表示,这样,我们建立了空间的点与有序数组(ρ,θ,z )之间的一种对应关系,把建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z )叫做点P 的柱坐标,记作P (ρ,θ,z ),其中ρ≥0,0≤θ<2π,z ∈R.(2)空间任意一点P 的直角坐标(x ,y ,z )与柱坐标(ρ,θ,z )之间的变换公式为⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z.2.球坐标系(1)定义:建立空间直角坐标系Oxyz .设P 是空间任意一点,连接OP ,记|OP |=r ,OP 与Oz 轴正向所夹的角为φ,设P 在Oxy 平面上的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为θ.这样点P 的位置就可以用有序数组(r ,φ,θ)表示.这样,空间的点与有序数组(r ,φ,θ)之间建立了一种对应关系,把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系),有序数组(r ,φ,θ)叫做点P 的球坐标,记作P (r ,φ,θ),其中r ≥0,0≤φ≤π,0≤θ<2π.(2)空间点P 的直角坐标(x ,y ,z )与球坐标(r ,φ,θ)之间的变换关系为⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ.[例1] (1)设点A 的直角坐标为(1,3,5),求它的柱坐标. (2)已知点P 的柱坐标为⎝⎛⎭⎫4,π3,8,求它的直角坐标. [思路点拨] 直接利用变换公式求解.[解] (1)由变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,得ρ2=x 2+y 2,z =z ,即ρ2=12+(3)2=4,∴ρ=2. tan θ=yx =3,又x >0,y >0.∴θ=π3,∴点A 的柱坐标为⎝⎛⎭⎫2,π3,5. (2)由变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z得x =4cos π3=2,y =4sin π3=23,z =8.∴点P 的直角坐标为(2,23,8).由直角坐标系中的直角坐标求柱坐标,可设点的柱坐标为(ρ,θ,z ),代入变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z求ρ,也可利用ρ2=x 2+y 2,求ρ.利用tan θ=yx 求θ,在求θ的时候特别注意角θ所在的象限,从而确定θ的值;同理,可由柱坐标转化为直角坐标.1.已知点M 的直角坐标为(0,1,2),求它的柱坐标. 解:ρ=x 2+y 2=02+12=1.∵x =0,y >0,∴θ=π2,∴点M 的柱坐标为⎝⎛⎭⎫1,π2,2. 2.将下列各点的柱坐标分别化为直角坐标. (1)⎝⎛⎭⎫2,π6,1;(2)⎝⎛⎭⎫6,5π3,-2;(3)()1,π,0. 解:设点的直角坐标为(x ,y ,z ). (1)∵(ρ,θ,z )=⎝⎛⎭⎫2,π6,1,∴⎩⎪⎨⎪⎧x =ρcos θ=2cos π6=3,y =ρsin θ=2sin π6=1,z =1,∴(3,1,1)为所求.(2)∵(ρ,θ,z )=⎝⎛⎭⎫6,5π3,-2, ∴⎩⎪⎨⎪⎧x =ρcos θ=6cos 5π3=3,y =ρsin θ=6sin 5π3=-33,z =-2,∴(3,-33,-2)为所求.(3)∵(ρ,θ,z )=(1,π,0),∴⎩⎪⎨⎪⎧x =ρcos θ=cos π=-1,y =ρsin θ=sin π=0,z =0,∴(-1,0,0)为所求.[例2] (1)已知点P 的球坐标为⎝⎛⎭⎫4,3π4, π4,求它的直角坐标; (2)已知点M 的直角坐标为(-2,-2,-22),求它的球坐标. [思路点拨] 直接套用坐标变换公式求解. [解] (1)由坐标变换公式得, x =r sin φcos θ=4sin3π4cos π4=2, y =r sin φsin θ=4sin 3π4sin π4=2,z =r cos φ=4cos 3π4=-22,故其直角坐标为(2,2,-22). (2)由坐标变换公式得,r =x 2+y 2+z 2=(-2)2+(-2)2+(-22)2=4. 由r cos φ=z =-22,得cos φ=-22r =-22,φ=3π4. 又tan θ=y x =1,则θ=5π4(M 在第三象限),从而知M 点的球坐标为⎝⎛⎭⎫4,3π4,5π4.由直角坐标化为球坐标时,可设点的球坐标为(r ,φ,θ),利用变换公式⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ求出r ,φ,θ即可;也可以利用r 2=x 2+y 2+z 2,tan θ=y x ,cos φ=zr来求.要特别注意由直角坐标求球坐标时,要先弄清楚φ和θ所在的位置.3.将下列各点的球坐标分别化为直角坐标. (1)⎝⎛⎭⎫2,π6,π3;(2)⎝⎛⎭⎫6,π3,2π3. 解:设点的直角坐标为(x ,y ,z ). (1)∵(r ,φ,θ)=⎝⎛⎭⎫2,π6,π3, ∴⎩⎪⎨⎪⎧x =r sin φcos θ=2sin π6cos π3=12,y =r sin φsin θ=2sin π6sin π3=32,z =r cos φ=2cos π6=3,∴⎝⎛⎭⎫12,32,3为所求.(2)∵(r ,φ,θ)=⎝⎛⎭⎫6,π3,2π3, ∴⎩⎪⎨⎪⎧x =r sin φcos θ=6sin π3cos 2π3=-332,y =r sin φsin θ=6sin π3sin 2π3=92,z =r cos φ=6cos π3=3,∴⎝⎛⎭⎫-332,92,3为所求.4.求下列各点的球坐标.(1)M (1,3,2);(2)N (-1,1,-2). 解:(1)由变换公式得,r =x 2+y 2+z 2=12+(3)2+22=2 2. 由z =r cos φ,得cos φ=z r =222=22,∴φ=π4,又tan θ=y x =31=3,x >0,y >0,∴θ=π3,∴它的球坐标为⎝⎛⎭⎫22,π4,π3. (2)由变换公式得,r =x 2+y 2+z 2=(-1)2+12+(-2)2=2. 由z =r cos φ,得cos φ=z r =-22,∴φ=3π4.又tan θ=y x =1-1=-1,x <0,y >0,∴θ=3π4,∴它的球坐标为⎝⎛⎭⎫2,3π4,3π4.一、选择题1.在球坐标系中,方程r =2表示空间的( ) A .球 B .球面 C .圆D .直线解析:选B r =2,表示空间的点到原点的距离为2,即表示球心在原点,半径为2的球面.2.设点M 的直角坐标为(-1,-3,3),则它的柱坐标是( ) A.⎝⎛⎭⎫2,π3,3 B.⎝⎛⎭⎫2,2π3,3 C.⎝⎛⎭⎫2,4π3,3 D.⎝⎛⎭⎫2,5π3,3 解析:选C ρ=(-1)2+(-3)2=2,∵tan θ=y x =3,x <0,y <0,∴θ=4π3,又z=3,∴点M 的柱坐标为⎝⎛⎭⎫2,4π3,3. 3.若点M 的球坐标为⎝⎛⎭⎫8,π3,5π6,则它的直角坐标为( ) A .(-6,23,4) B .(6,23,4) C .(-6,-23,4)D .(-6,23,-4)解析:选A 由x =8sin π3cos 5π6=-6,y =8sin π3sin 5π6=23,z =8cos π3=4,得点M 的直角坐标为(-6,23,4).4.若点M 的直角坐标为(3,1,-2),则它的球坐标为( ) A.⎝⎛⎭⎫22,3π4,π6 B.⎝⎛⎭⎫22,π4,π6C.⎝⎛⎭⎫22,π4,π3D.⎝⎛⎭⎫22,3π4,π3 解析:选A 设M 的球坐标为(r ,φ,θ),r ≥0,0≤φ≤π,0≤θ<2π,则r =(3)2+12+(-2)2=22, 由22cos φ=-2得φ=3π4, 又tan θ=13=33,x >0,y >0,得θ=π6,∴点M 的球坐标为⎝⎛⎭⎫22,3π4,π6.故选A. 二、填空题5.点P 的柱坐标为⎝⎛⎭⎫4,π6,3,则点P 到原点的距离为________. 解析:x =ρcos θ=4cos π6=23,y =ρsin θ=4sin π6=2.即点P 的直角坐标为(23,2,3),其到原点的距离为(23-0)2+(2-0)2+(3-0)2=25=5.答案:56.点M (-3,-3,3)的柱坐标为________. 解析:ρ=x 2+y 2=(-3)2+(-3)2=32,∵tan θ=-3-3=1,x <0,y <0,∴θ=5π4,∴点M 的柱坐标为⎝⎛⎭⎫32,5π4,3. 答案:⎝⎛⎭⎫32,5π4,3 7.已知点M 的直角坐标为(1,2,3),球坐标为(r ,φ,θ),则tan φ=________,tan θ=________.解析:如图所示,tan φ=x 2+y 2z =53,tan θ=y x =2.答案:532 三、解答题8.设点M 的直角坐标为(1,1,2),求点M 的柱坐标与球坐标. 解:由坐标变换公式,可得ρ=x 2+y 2=2, ∵tan θ=y x =1,x >0,y >0,∴θ=π4.r =x 2+y 2+z 2=12+12+(2)2=2. 由r cos φ=z =2(0≤φ≤π),得cos φ=2r =22,φ=π4. 所以点M 的柱坐标为⎝⎛⎭⎫2,π4,2,球坐标为⎝⎛⎭⎫2,π4,π4. 9.已知点M 的柱坐标为⎝⎛⎭⎫2,π4,3,点N 的球坐标为⎝⎛⎭⎫2,π4,π2,求线段MN 的长度. 解:设点M 的直角坐标为(x ,y ,z ),由变换公式得,x =ρcos θ=2cos π4=1,y =ρsin θ=2sin π4=1,z =3,∴点M 的直角坐标为(1,1,3),设点N 的直角坐标为(a ,b ,c ), 则a =ρsin φ·cos θ=2×22×0=0,b =ρsin φ·sin θ=2×22×1=2,c =ρcos φ=2×22=2,∴点N 的直角坐标为(0,2,2).∴|MN |=12+(1-2)2+(3-2)2=15-8 2.10.已知正方体ABCD -A 1B 1C 1D 1的棱长为1,如图所示建立空间直角坐标系A -xyz ,以Ax 为极轴.求点C 1的直角坐标,柱坐标以及球坐标.解:点C 1的直角坐标为(1,1,1),设点C 1的柱坐标为(ρ,θ,z ),球坐标为(r ,φ,θ),其中ρ≥0,r ≥0,0≤φ≤π,0≤θ<2π,由坐标变换公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z ,且⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ,得⎩⎪⎨⎪⎧ ρ=x 2+y 2,tan θ=y x (x ≠0),且⎩⎪⎨⎪⎧r =x 2+y 2+z 2,cos φ=z r ,得⎩⎨⎧ρ=2,tan θ=1,且⎩⎪⎨⎪⎧r =3,cos φ=33.结合图形,得θ=π4,由cos φ=33得tan φ= 2.所以点C 1的直角坐标为(1,1,1),柱坐标为⎝⎛⎭⎫2,π4,1,球坐标为⎝⎛⎭⎫3,φ,π4,其中tan φ=2,0≤φ≤π.。
坐标系柱坐标系与球坐标系简介pptxx年xx月xx日contents •引言•坐标系柱坐标系•坐标系球坐标系•柱坐标系与球坐标系的比较•如何选择合适的坐标系•坐标系在科学领域的应用及发展目录01引言描述物体位置和运动的基本工具为定量描述提供基础应用于不同领域如物理、地理、工程等坐标系在科学领域的重要性坐标系基本概念及分类直角坐标系极坐标系Array基于距离和角度基于三个互相垂直的坐标轴圆柱坐标系球坐标系基于距离、角度和高度基于距离、角度和极角本次报告的主要内容比较两种坐标系的优缺点和适用范围举例说明在物理学和工程学中的应用柱坐标系与球坐标系的定义、性质和应用02坐标系柱坐标系1柱坐标系基本概念23是三维坐标系的一种,利用长度、角度和高度来描述点的位置。
柱坐标系以长度为r、角度为θ、高度为z三个参数来表示点的位置。
圆柱坐标系以球半径R、角度θ和 φ来表示点的位置,其中θ表示经度,φ表示纬度。
球面坐标系通过将直角坐标系的x、y坐标值分别替换为r和θ角度值,将z 坐标值保持不变即可实现转换。
直角坐标系转换为柱坐标系需要将r、θ和z三个参数转换为x、y、z三个方向的坐标值,其中x=r*cos(θ),y=r*sin(θ),z=z。
柱坐标系转换为直角坐标系柱坐标系与直角坐标系转换1柱坐标系应用举例23在地球物理学中,柱坐标系常被用于描述地球表面和内部的结构和特征。
在电磁学中,柱坐标系常被用于描述圆柱形导体中的电场和磁场分布。
在流体力学中,柱坐标系常被用于描述管道内的流体流动和传热等物理现象。
03坐标系球坐标系球坐标系是三维坐标系的一种,由一个原点、一个在原点正上方的北极点以及一条从原点出发,指向北极点的极轴构成。
球坐标系基本概念定义径向距离、角度和高度。
三个基本元素在球坐标系中,点的位置由径向距离、角度和高度三个参数确定。
坐标表示直角坐标系转换为球坐标系通过将直角坐标系的三个轴分别投影到球坐标系的三个元素上,可以得到球坐标系表示的点。

球面坐标系和柱面坐标系的定义及其应用球面坐标系和柱面坐标系是数学中关键的方法,经常用来描述和解决一些几何和物理问题,它们与直角坐标系、极坐标系一样,是一种坐标系的表示方式。
一、球面坐标系球面坐标系是以球面为基础的坐标系,它是由半径、极角和方位角确定的。
坐标轴上的点对应着球面上的一个点,可以用三个参数(r、θ、φ)来描述它的位置。
其中,r是从坐标原点到球面上某一点的距离,是一个实数;θ是竖直方向的极角,它的范围在0到π之间;φ是水平方向的方位角,它的范围在0到2π之间。
坐标系的原点是球心,竖直方向的坐标轴是与地球赤道垂直的轴线,水平方向的坐标轴则是经过原点和北极点的轴线。
球面坐标系在物理学和天文学等领域应用广泛,例如测量地球上某一点的纬度和经度、描述电磁场的分布等。
二、柱面坐标系柱面坐标系是一种由高度、半径和角度确定的坐标系,它通常用来描述长方形坐标系缺陷的问题。
柱面坐标系可以是圆柱面坐标系或斜柱面坐标系,但都表示同样的信息。
在圆柱坐标系中,一点的坐标为(r,θ,z),其中r表示离坐标轴的距离,θ表示与x轴的夹角,z表示高度。
而在斜柱面坐标系中,一点的坐标为(r,θ,z'),其中r和θ用同样的方式表示,z'是某个平面内的高度。
只有当某一平面中的z'为零时,斜柱面坐标系才与圆柱坐标系相同。
类似于球面坐标系的应用,圆柱坐标系和斜柱坐标系在物理学、工程学和计算机图形学等领域中有广泛的应用。
例如在计算机图形学中,柱面坐标系被用来描述某些对象的形状和运动,在计算机辅助设计(CAD)中,也被用来表示机械元件的三维空间位置。
总的来说,球面坐标系和柱面坐标系是一组非常实用的工具,它们有助于我们更好地理解和描述现实世界中的各种问题。
了解和掌握这些坐标系的基础和应用,有助于我们更好地应用它们来解决实际问题。
柱坐标和球坐标柱坐标和球坐标是数学中常用的两种坐标系,它们在描述空间中点的位置时有各自的特点和应用。
本文将介绍柱坐标和球坐标的定义、表示方法以及它们之间的转换关系。
柱坐标柱坐标是三维空间中表示点位置的坐标系之一。
柱坐标通常使用径向距离r、极角 $\\theta$ 和高度z来描述一个点的位置。
在柱坐标系中,点 $(r, \\theta,z)$ 表示距离原点的长度为r,与x轴正向的夹角为 $\\theta$,高度为z的点。
柱坐标系下,点 $(r, \\theta, z)$ 与直角坐标系下的点(x,y,z)之间的关系可以用以下公式表示:$$ \\begin{aligned} x &= r \\cdot \\cos(\\theta) \\\\ y &= r \\cdot\\sin(\\theta) \\\\ z &= z \\end{aligned} $$球坐标球坐标是另一种用于表示三维空间中点位置的坐标系。
球坐标通常使用球径ρ、极角 $\\phi$ 和方位角 $\\theta$ 来描述点的位置。
在球坐标系中,点$(ρ, \\phi,\\theta)$ 表示距离原点的长度为ρ,与z轴正向的夹角为 $\\phi$,与x轴正向的夹角为 $\\theta$ 的点。
球坐标系下,点$(ρ, \\phi, \\theta)$ 与直角坐标系下的点(x,y,z)之间的关系可以用以下公式表示:$$ \\begin{aligned} x &= ρ \\cdot \\sin(\\phi) \\cdot \\cos(\\theta) \\\\ y &= ρ \\cdot \\sin(\\phi) \\cdot \\sin(\\theta) \\\\ z &= ρ \\cdot \\cos(\\phi)\\end{aligned} $$柱坐标和球坐标之间的转换要将柱坐标转换为球坐标,可以使用以下公式:$$ \\begin{aligned} ρ &= \\sqrt{r^2 + z^2} \\\\ \\phi &=\\arctan\\left(\\frac{r}{z}\\right) \\\\ \\theta &= \\theta \\end{aligned} $$ 类似地,要将球坐标转换为柱坐标,可以使用以下公式:$$ \\begin{ali gned} r &= ρ \\cdot \\sin(\\phi) \\\\ z &= ρ \\cdot \\cos(\\phi) \\\\ \\theta &= \\theta \\end{aligned} $$应用和总结柱坐标和球坐标在不同的场景中有着广泛的应用,例如在物理学、工程学和计算机图形学领域。
柱坐标与球坐标系简介
在数学和物理学中,柱坐标和球坐标系是描述三维空间中点的两种常用坐标系。
它们为研究三维问题提供了方便的工具,可以使问题的表达和求解更加简洁。
柱坐标系
柱坐标系是一种用圆柱形式来描述三维空间中的点的坐标系。
在柱坐标系中,
一个点的位置由距离原点的长度、与正向x轴的夹角和z坐标组成。
通常用(r, θ, z)来表示一个点的坐标,其中r表示点到原点的距离,θ表示点在x-y平面上的极角,z表示点在z轴上的坐标。
柱坐标系在求解具有轴对称性的问题时特别有用,例如旋转体的体积和表面积
的计算等问题。
球坐标系
球坐标系是通过球坐标来描述三维空间中的点的坐标系。
在球坐标系中,一个
点的位置由距离原点的长度、与正向z轴的夹角和在x-y平面上的极角组成。
通常用(r, θ, φ)来表示一个点的坐标,其中r表示点到原点的距离,θ表示点在x-y平面上的极角,φ表示点在z轴上的极角。
球坐标系常常用于处理具有球对称性或球体几何的问题,例如电场和磁场的计
算等。
它也在计算机图形学和三维建模中被广泛应用。
无论是柱坐标系还是球坐标系,它们都是解决特定类型的问题时十分有效的工具。
通过灵活运用这两种坐标系,我们可以更好地理解和分析三维空间中的问题,为实际问题的求解提供更多的可能性和方法。
柱坐标和球坐标系给了我们描述空间中点位置的不同视角,为解决相关问题提
供了更多的数学工具。
通过学习和掌握这两种坐标系的原理和应用,我们可以在数学和物理领域中更加灵活地处理复杂的三维问题。
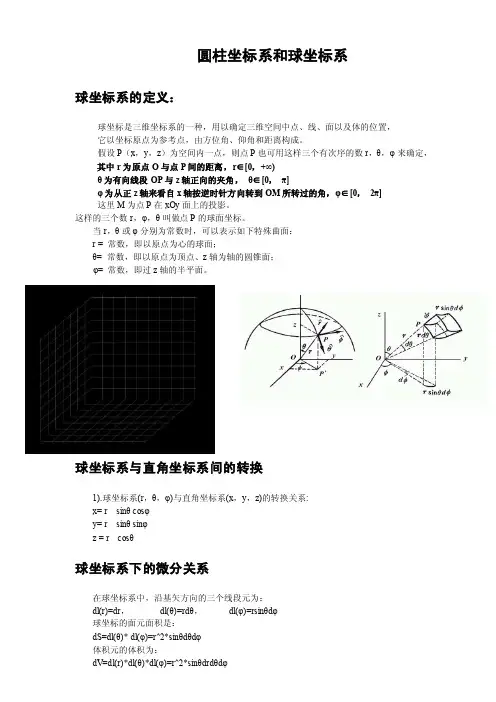
圆柱坐标系和球坐标系球坐标系的定义:球坐标是三维坐标系的一种,用以确定三维空间中点、线、面以及体的位置,它以坐标原点为参考点,由方位角、仰角和距离构成。
假设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,θ,φ来确定,其中r为原点O与点P间的距离,r∈[0,+∞)θ为有向线段OP与z轴正向的夹角,θ∈[0,π]φ为从正z轴来看自x轴按逆时针方向转到OM所转过的角,φ∈[0,2π]这里M为点P在xOy面上的投影。
这样的三个数r,φ,θ叫做点P的球面坐标。
当r,θ或φ分别为常数时,可以表示如下特殊曲面:r = 常数,即以原点为心的球面;θ= 常数,即以原点为顶点、z轴为轴的圆锥面;φ= 常数,即过z轴的半平面。
球坐标系与直角坐标系间的转换1).球坐标系(r,θ,φ)与直角坐标系(x,y,z)的转换关系:x= r sinθ cosφy= r sinθsinφz = r cosθ球坐标系下的微分关系在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr,dl(θ)=rdθ,dl(φ)=rsinθdφ球坐标的面元面积是:dS=dl(θ)* dl(φ)=r^2*sinθdθdφ体积元的体积为:dV=dl(r)*dl(θ)*dl(φ)=r^2*sinθdrdθdφ圆柱坐标系的定义:它是二维极坐标系往z-轴的延伸。
添加的第三个坐标专门用来表示P点离xy-平面的高低。
按照国际标准化组织建立的约定(ISO 31-11) ,径向距离、方位角、高度,分别标记为。
如图右,P 点的圆柱坐标是。
是P 点与z-轴的垂直距离。
是线OP 在xy-面的投影线与正x-轴之间的夹角。
与直角坐标的等值。
圆柱坐标系与直角坐标系间的转换1).圆柱坐标系(r,φ,z)与直角坐标系(x,y,z)的转换关系:x=r co sφy=r sinφz=z圆柱坐标系下的微分关系在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr,dl(φ)=rdφ,dl(z)= dz球坐标的面元面积是:dS=dl(θ)* dl(z)=r dφ dz体积元的体积为:dV=dl(r)*dl(φ)*dl(z)=r dr dφ dz。
球坐标系和柱坐标系球坐标系和柱坐标系是空间解析几何中常用的坐标系,它们可以用来描述三维空间中的点的位置和方向。
本文将介绍球坐标系和柱坐标系的定义、坐标变换以及其在不同领域的应用。
一、球坐标系球坐标系是一种三维坐标系,用来描述三维空间中的点的位置。
它由径向距离r、极角θ和方位角φ来确定一个点的坐标。
径向距离r表示点到坐标原点的距离,极角θ表示点与正z轴的夹角,方位角φ表示点在x-y平面上投影与正x轴的夹角。
在球坐标系中,一个点的坐标可以表示为(r,θ,φ)。
坐标变换公式如下:```x = r * sinθ * cosφy = r * sinθ * sinφz = r * cosθ```球坐标系常见于物理学、天文学和计算机图形学等领域的问题求解。
物理学中常用球坐标系描述粒子在空间中的位置和动量,能够简化很多问题的求解过程。
在天文学中,球坐标系可以用来描述星体的位置和运动轨迹。
二、柱坐标系柱坐标系是另一种常见的三维坐标系,适用于平面内与柱面有关的问题。
柱坐标系由极径ρ、极角θ和高度z来确定一个点的坐标。
极径ρ表示点到z轴的距离,极角θ表示点在x-y平面上的投影与正x轴的夹角,高度z表示点在z轴上的坐标。
柱坐标系中,一个点的坐标可以表示为(ρ,θ,z)。
坐标变换公式如下:```x = ρ * cosθy = ρ * sinθz = z```柱坐标系常见于物理学、工程学和流体力学等领域的问题求解。
在工程学中,柱坐标系常用于描述圆柱形结构的变形和应力分布,能够更直观地理解和解决与柱面相关的工程问题。
在流体力学中,柱坐标系可以用来描述圆柱形容器中的流体流动规律。
综上所述,球坐标系和柱坐标系是在三维空间中描述点的位置和方向的常用坐标系。
它们各自具有独特的特点和应用场景,在不同领域的问题求解中发挥着重要作用。
熟练掌握球坐标系和柱坐标系的定义和坐标变换公式,对于解决相关问题具有重要意义。
四:柱坐标系和球坐标系一:基础知识梳理:1.柱坐标系在平面极坐标系的基础上,通过极点O ,再增加一条与极坐标系所在平面垂 直的z 轴,这样就建立了柱坐标系(如图).设M (x ,y ,z )为空间一点,并设点M 在xOy 平面上的投影点P 的极坐标为(r ,θ),则这样的三个数r ,θ,z 构成的有序数组(r ,θ,z )就叫作点M 的______,这里规定r ,θ,z 的变化范围为0≤r <+∞,0≤θ<2π,-∞<z <+∞.特别地,r =常数,表示的是以z 轴为轴的______;θ=常数,表示的是过z 轴的______;z =常数,表示的是与xOy 平面平行的____.显然,点M 的直角坐标与柱坐标的关系为⎩⎪⎨⎪⎧ x = ,y = ,z =z .2. 球坐标系设M (x ,y ,z )为空间一点,点M 可用这样三个有次序的数r ,φ,θ来确定,其中r为原点O 到点M 间的距离,φ为有向线段OM →与z 轴正方向所夹的角,θ为从z 轴正半轴看,x 轴正半轴按逆时针方向旋转到有向线段OP →的角,这里P 为点M 在xOy 平面上的投影(如图).这样的三个数r ,φ,θ构成的有序数组(r ,φ,θ)叫作点M 的______,这里r ,φ,θ的变化范围为0≤r <+∞,0≤φ≤π,0≤θ<2π,特别地,r =常数,表示的是____________;φ=常数,表示的是以原点为顶点,z 轴为轴的圆锥面;θ=常数,表示的是过z 轴的半平面.点M 的直角坐标与球坐标的关系为⎩⎪⎨⎪⎧ x =|OP |cos θ= ,y =|OP |sin θ= ,z = .二.课堂练习:1.将点M 的直角坐标化为柱坐标,将点P 的柱坐标化为直角坐标.(1) M (-1,3,2);(2)P ⎝ ⎛⎭⎪⎫2,π4,1.分析:利用相关公式代入进行转化求值.反思:已知直角坐标求柱坐标,可以先设出点M 的柱坐标为(r ,θ,z ),代入变换公式⎩⎪⎨⎪⎧ x =r cos θ,y =r sin θ,z =z 求r ,也可以利用r 2=x 2+y 2求r ,利用tan θ=y x求θ,在求θ的时候特别注意角θ所在的象限,从而确定θ的取值;已知柱坐标求直角坐标时,将r ,θ,z 的值代入变换公式⎩⎪⎨⎪⎧ x =r cos θ,y =r sin θ,z =z 即可.2.将点M 的直角坐标化为球坐标,点P 的球坐标化为直角坐标.(1)M (1,3,2);(2)P ⎝⎛⎭⎪⎫2,π6,π3.分析:利用相关公式代入进行转化求值.反思:由点M 的直角坐标化为球坐标时,可以先设点M 的球坐标为(r ,φ,θ),再利用变换公式⎩⎪⎨⎪⎧ x =r sin φcos θ,y =r sin φsin θ,z =r cos φ求出r ,φ,θ代入点的球坐标即可;也可以利用r 2=x 2+y 2+z 2,tan θ=y x ,c O s φ=z r.由直角坐标求球坐标,在确定θ和φ的取值时,要特别注意θ和φ的取值范围以及点M 的位置,由球坐标化为直角坐标时,可直接代入变换公式,计算x ,y ,z 的值即可.3.设点M 的直角坐标为(1,,9),则它的柱坐标是( ).A .π2,,93⎛⎫ ⎪⎝⎭ B .2π2,,93⎛⎫ ⎪⎝⎭C .4π2,,93⎛⎫ ⎪⎝⎭D .5π2,,93⎛⎫ ⎪⎝⎭4在球坐标系中,Mππ4,,46⎛⎫⎪⎝⎭与Nπ24,,π43⎛⎫⎪⎝⎭两点间的距离是__________.5设点A的柱坐标为π4,则它的球坐标为__________.6用两个平行平面去截球,在两个截面圆上有两个点,它们分别为Aπ8,,4Aθ⎛⎫ ⎪⎝⎭、B3π8,,4Bθ⎛⎫⎪⎝⎭,求出这两个截面间的距离.。