柱坐标系、球坐标系与直角坐标系之间单位矢量的转换
- 格式:ppt
- 大小:661.50 KB
- 文档页数:19

球坐标系与直角坐标系的矢量转换例题首先要搞清楚r, phi, theta是什么。
r很清楚,就是向量的本身的长度,也就是,r = 根号(x^2 + y^2 + z^2),r的方向是 radial direction,就是本身那个向量的方向。
phi和theta是两个角度。
物理书中,一般习惯是,theta是向量和z轴的夹角。
phi是向量在xy平面上的投影和x轴的夹角。
(你可以根据我的描绘自己画张图,比较好看出来。
)那么,很明显,z = r * cos(theta)xy 平面上那个投影的长度 = r * sin(theta)所以,x = r * sin(theta) * cos(phi)y = r * sin(theta) * sin(phi).theta和phi也是有方向的。
他们的方向不是那么重要。
是逆时针走的话是他们增加的方向(正方向)。
你的那个例子,w向量=w乘以z向量, 是说,w在直角坐标系中,是指向z轴正方向的一个向量。
r是任意一个向量。
所以,w向量叉乘r向量= w向量长度 * r向量长度 * w、r的夹角(很明显就是theta,画图看出) * 一个方向向量。
这个方向向量用右手定则判定,右手从w 握向r,拇指方向。
仔细想想,这个方向就是phi的方向。
我也可以简单说下原因,基本上一个3维的右手坐标系,比如xyz直角坐标系,两个坐标系方向叉乘会得到第三个方向。
x 叉 y = z方向,y 叉 z = x方向,z 叉 x = y 方向。
在球坐标系也是一样的,theta方向,phi方向和r方向。
w和r 的夹角就是theta,所以你可以看作,w的方向和theta的方向有关系。
所以w 叉 r 的方向是phi的方向。
(但做题的时候这个方向是谁的方向不那么重要,你会用右手定则判定就可以了)。
球坐标基矢与直角坐标基矢变换推导球坐标基矢与直角坐标基矢变换推导一、引言在物理学和工程学中,我们经常会遇到涉及坐标系和坐标变换的问题。
球坐标系和直角坐标系是两种常见的坐标系,它们之间的坐标变换是一个重要的内容。
本文将从球坐标基矢和直角坐标基矢入手,深入探讨它们之间的变换关系。
二、球坐标基矢和直角坐标基矢在球坐标系中,位置矢量可以用径向、极角和方位角来描述,对应的基矢分别为 r^、θ^、φ^。
在直角坐标系中,位置矢量可以用 x、y、z 来描述,对应的基矢分别为î、ĵ、k。
下面,我们将从数学角度出发,详细推导球坐标基矢与直角坐标基矢的变换关系。
三、球坐标基矢到直角坐标基矢的转化我们将球坐标系的基矢用直角坐标系的基矢表示,即 r^、θ^、φ^ → î、ĵ、k。
根据基矢的定义和坐标变换的定义,我们可以得到:1) r^ 的表达式r^ = sinθcosφî + sinθsinφĵ + cosθk2) θ^ 的表达式θ^ = cosθcosφî + cosθsinφĵ - sinθk3) φ^ 的表达式φ^ = -sinφî + cosφĵ接下来,我们将直角坐标系的基矢用球坐标系的基矢表示,即î、ĵ、k → r^、θ^、φ^。
根据基矢的定义和坐标变换的定义,我们可以得到:1) î 的表达式î = sinθcosφ r^ + cosθcosφθ^ - sinφφ^2) ĵ 的表达式ĵ = sinθsinφ r^ + cosθsinφθ^ + cosφφ^3) k 的表达式k = cosθ r^ - sinθθ^四、总结与回顾通过以上推导,我们得到了球坐标基矢与直角坐标基矢之间的变换关系。
这对于理解空间中物体的运动、力学问题以及电磁学问题等具有重要的意义。
在实际问题中,我们可以根据具体情况选择合适的坐标系和变换方法,以简化问题的求解过程。
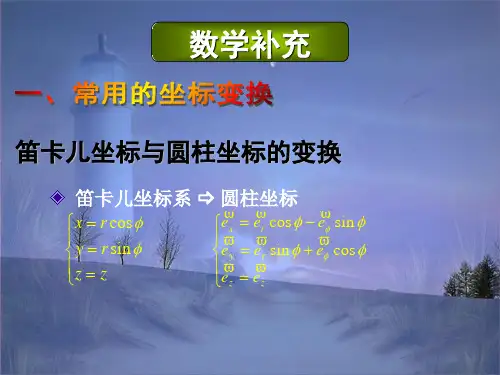
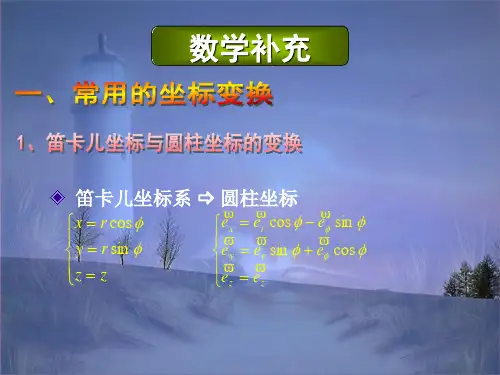
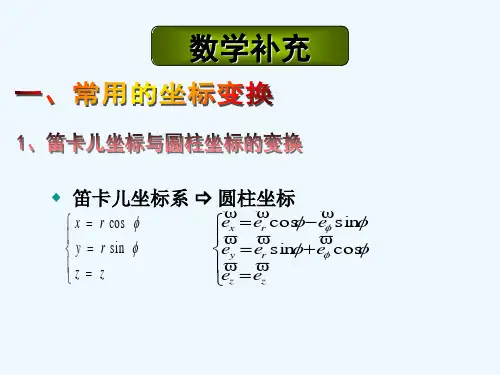

圆柱坐标系单位矢量转换
在物理以及工程领域中,经常会涉及到不同坐标系间的转换问题。
其中,圆柱坐标系是一种常用的坐标系。
在进行圆柱坐标系下的矢量运算时,需要对矢量进行单位矢量转换,以便在不同坐标系下准确描述物理现象。
圆柱坐标系简介
圆柱坐标系是一种三维坐标系,由径向(r)、方位角(θ)和高度(z)三个坐标轴组成。
在圆柱坐标系下,一个点的位置可以用(r, θ, z)表示。
在进行矢量运算时,需要将矢量表示成基本单位矢量的线性组合,即单位矢量。
圆柱坐标系单位矢量
在圆柱坐标系中,单位矢量与坐标轴的关系如下:
•径向单位矢量:r方向的单位矢量为er。
•方位角单位矢量:θ方向的单位矢量为eθ。
•高度单位矢量:z方向的单位矢量为ez。
圆柱坐标系单位矢量转换
在进行圆柱坐标系下的矢量运算时,常常需要将矢量从一个坐标系转换到另一个坐标系。
为了方便描述这种转换过程,定义以下公式:
给定一个矢量A在直角坐标系下的表示为(Ax, Ay, Az),则该矢量在圆柱坐标系下的表示为:
A = Ar * er + Aθ * eθ + Az * ez
其中,Ar、Aθ、Az为矢量A在径向、方位角和高度方向上的投影。
总结
通过单位矢量的转换,我们可以方便地在圆柱坐标系下描述矢量的运算。
在实际问题中,通过熟练掌握圆柱坐标系单位矢量转换的方法,能够更加高效地解决相关物理和工程问题。
掌握圆柱坐标系下的矢量转换,对于进一步深入理解和应用圆柱坐标系具有重要意义。
希望本文对于圆柱坐标系单位矢量转换有所帮助,并能引发更多关于坐标系转换相关的讨论和研究。
圆柱坐标系和球坐标系单位矢量关系的区别概述在物理和数学的研究领域中,圆柱坐标系和球坐标系是两种常用的坐标系,它们在描述三维空间中的点和向量时具有独特的优势。
本文将重点讨论这两种坐标系中单位矢量的关系,并分析它们之间的区别。
圆柱坐标系圆柱坐标系是一种以距离、角度和高度来描述空间中点的坐标系。
在圆柱坐标系中,一个点的位置可以由三个参数来确定:径向距离(ρ)、极角(φ)和高度(z)。
单位矢量的定义在圆柱坐标系中,单位矢量可以通过对坐标轴的偏导数来定义。
具体而言,我们可以定义三个单位矢量,分别是径向单位矢量(e_ρ)、极角单位矢量(e_φ)和高度单位矢量(e_z)。
单位矢量的关系在圆柱坐标系中,单位矢量之间存在一定的关系。
由于每个点的位置可以由三个参数来确定,单位矢量的方向也会受到这些参数的影响。
单位矢量之间的关系可以通过以下方程表示:e_ρ = cos(φ) * e_x + sin(φ) * e_ye_φ = -sin(φ) * e_x + cos(φ) * e_ye_z = e_z其中,e_x、e_y和e_z分别是直角坐标系中的单位矢量,φ是极角。
球坐标系球坐标系是一种以距离、极角和仰角来描述空间中点的坐标系。
在球坐标系中,一个点的位置可以由三个参数来确定:距离(r)、极角(θ)和仰角(φ)。
单位矢量的定义在球坐标系中,单位矢量同样可以通过对坐标轴的偏导数来定义。
具体而言,我们可以定义三个单位矢量,分别是径向单位矢量(e_r)、极角单位矢量(e_θ)和仰角单位矢量(e_φ)。
单位矢量的关系在球坐标系中,单位矢量之间也存在一定的关系。
由于每个点的位置可以由三个参数来确定,单位矢量的方向也会受到这些参数的影响。
单位矢量之间的关系可以通过以下方程表示:e_r = sin(θ) * cos(φ) * e_x + sin(θ) * sin(φ) * e_y + cos(θ) * e_ze_θ = cos(θ) * cos(φ) * e_x + cos(θ) * sin(φ) * e_y - sin(θ) * e_ze_φ = -sin(φ) * e_x + cos(φ) * e_y其中,e_x、e_y和e_z分别是直角坐标系中的单位矢量,θ是仰角,φ是极角。
柱坐标与直角坐标系的转换关系在数学和物理学中,柱坐标和直角坐标系是描述空间中点位置的两种常见方式。
柱坐标系以距离原点的距离、倾斜角度和高度为参数描述点的位置,而直角坐标系以点在各个轴上的投影为坐标表示点的位置。
在实际问题中,有时需要在这两种坐标系之间进行转换,下面我们来探讨柱坐标与直角坐标系的转换关系。
柱坐标系的表示在柱坐标系中,一个点的位置由三个参数确定:极径r、极角$\\theta$和高度z。
极径r表示点到原点的距离,极角$\\theta$表示点与正半轴的夹角,高度z表示点在z轴上的垂直投影距离。
柱坐标系下,一个点P的坐标$(r, \\theta, z)$可以用三个实数表示,公式如下:$$P(r, \\theta, z)$$转换关系要将柱坐标转换为直角坐标,可以通过以下公式进行计算:•$x = r \\cdot \\cos(\\theta)$•$y = r \\cdot \\sin(\\theta)$•z=z其中,x、y、z分别为点在直角坐标系下的坐标,r、$\\theta$、z为点在柱坐标系下的参数。
同样,如果已知点在直角坐标系下的坐标(x,y,z),可以通过以下公式将其转换为柱坐标:•$r = \\sqrt{x^2 + y^2}$•$\\theta = \\arctan(\\frac{y}{x})$•z=z转换示例假设有一个点$P(3, \\frac{\\pi}{6}, 2)$在柱坐标系下的坐标,我们可以先将其转换为直角坐标。
根据上述转换公式:•$x = 3 \\cdot \\cos(\\frac{\\pi}{6}) = \\frac{3\\sqrt{3}}{2}$•$y = 3 \\cdot \\sin(\\frac{\\pi}{6}) = \\frac{3}{2}$•z=2因此,点P在直角坐标系下的坐标为$(\\frac{3\\sqrt{3}}{2}, \\frac{3}{2}, 2)$。