自动控制原理_吴怀宇_课后习题_第三章
- 格式:doc
- 大小:315.50 KB
- 文档页数:7
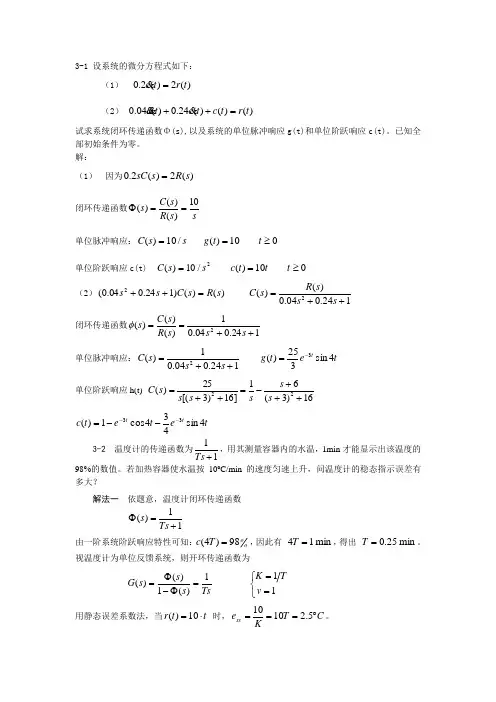
3-1设系统的微分方程式如下:(1)0.2c(t) 2r(t)单位脉冲响应:C(s) 10/s g(t) 103t3 3tc(t) 1 e cos4t e si n4t413-2 温度计的传递函数为 —,用其测量容器内的水温,1min 才能显示出该温度的Ts 198%的数值。
若加热容器使水温按 10(C/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数由一阶系统阶跃响应特性可知: c(4T) 98 o o ,因此有 4T 1 min ,得出T 0.25 min 。
视温度计为单位反馈系统,则开环传递函数为(s)1K 1TG(s)—1(s) Tsv 1用静态误差系数法,当r(t) 10t 时,e ss10 10T 2.5 C oK(2) 0.04c(t)0.24c(t) c(t)r(t)试求系统闭环传递函数① 部初始条件为零。
解:(s),以及系统的单位脉冲响应 g(t)和单位阶跃响应 c(t)。
已知全(1)因为 0.2sC(s)2R(s) 闭环传递函数(s)C(s) 10R(s) s单位阶跃响应c(t) C(s) 10/s 2c(t) 10t t 0(2) (0.04s 20.24s 1)C(s) R(s)C (s )闭环传递函数(s)C(s) R(s)120.04s0.24s 1单位脉冲响应:C(s)120.04s 2 0.24s 1g(t)25 e 33tsi n4t单位阶跃响应h(t) C(s)25 s[(s 3)216]1 s 6 s (s 3)216(s)1 Ts 1解法二依题意,系统误差疋义为e(t) r(t) c(t),应有e(s)E(s)1 C(s)R(s)11 TsR(s) Ts 1 Ts 13-3 已知二阶系统的单位阶跃响应为c(t) 10 12.5e 1.2t sin(1.6t 53.1o)试求系统的超调量c%、峰值时间t p和调节时间t'si n( 1n t )t p Jl- 1.96(s■1 2n1.63.5 3.5t s 2.92(s)n 1.2或:先根据c(t)求出系统传函,再得到特征参数,带入公式求解指标。

第三章3-1已知系统脉冲响应 1.25()0.0125t k t e -=,试求系统闭环传递函数()s Φ。
解:由系统的脉冲响应 1.25()0.0125t k t e -=得 0.0125() 1.25C s s =+ 又 ()1R s = 则()0.01251()() 1.2580100C s s R s s s Φ===++ 3-3单位反馈系统的开环传递函数4()(5)G s s s =+,求单位阶跃响应h(t)和调节时间t s 。
解:由开环传递函数4()(5)G s s s =+得闭环传递函数为2()4()1()54G s s G s s s Φ==+++则 单位阶跃响应24()()()(54)H s s R s s s s =Φ=++ 拉氏反变换得:441()133t t h t e e --=-+ ∵24()54s s s Φ=++ ∴24,25n n ωζω== 解得:2, 1.25n ωζ== 若取5%∆=,则得 31.2s nt s ζω≈=若取2%∆=,则得 41.6s nt s ζω≈=3-6机器人控制系统结构图如下图所示,试确定参数K 1 ,K 2,使系统阶跃响应的峰值时间0.5p t s =,超调量2%δ=。
解:由图可得 系统闭环传递函数1221()()1()K K G s s G s s as K Φ==+++对照二阶系统的数学模型有212,2,1n n K a K ωζω===又0.52%p t e δ==== 解得10.04,0.78n ωζ== 则1215.67,100.71,1a K K ===3-7设上题所示系统的单位阶跃响应如下图所示,试确定系统参数K 1 ,K 2和a 。
解:由图可知1()3,,0.13p p h t δ∞=== 又∵ 系统单位阶跃响应为:1221()()()()K K H s s R s s s as K =Φ=++∴20()lim ()3130.1p s p h sH s K et δ→∞=======解得33.3,0.3n ωζ==代入21,2n n K a ωζω== 有 1222,1106.5,3a K K ===3-8已知系统的特征方程,试判别系统的稳定性,并确定在s 右半平面根的个数及纯虚根。
3-1 i 殳来统的墩专力桿式旬卜:(1) 0.2c(t) =2r(t)(2)0.04c(t) 0.24c(t) c(t) = r(t)试求系统闭环传递函数 ①(s),以及系统的单位脉冲响应 部初始条件为零。
解:(1) 因为 0.2sC(s) =2R(s)闭环传递函数_ 1_ 20.04s0.24s 1Ts 198%的数值。
若加热容器使水温按 10OC/min 的速度匀速上升,问温度计的稳态指示误差有 多大?Ts 1由一阶系统阶跃响应特性可知: c(4T)二98oo ,因此有 4T =1 min ,得出 T = 0.25 min 。
视温度计为单位反馈系统,则开环传递函数为单位脉冲响应: C(s)=10/s g(t) -10 t _0单位阶跃响应 c(t) C(s) =10/s 2c(t) = 10t(2)(0.04s 2 0.24s 1)C(s)二 R(s)C(s)R(s) 0.04s 20.24s 1单位脉冲响应: C(s)= 0.04s0.24s 1g(t)用宀n4t3单位阶跃响应 h " Wk 2; 16]s 6s (s 3)216g(t)和单位阶跃响应 c(t)。
已知全 闭环传递函数13-2 温度计的传递函数为 — ,用其测量容器内的水温,1min 才能显示出该温度的解法一 依题意,温度计闭环传递函数1G(s) 口G(s“4」 1 —①(s) Ts「K=”TV=1用静态误差系数法,当 r(t^10 t 时,10e ss 二—=10T = 2.5 C 。
K3-3 已知二阶系统的单位阶跃响应为c(t) =10-12.5e」.2t si n(1.6t 53.1o)试求系统的超调量b%、峰值时间t p和调节时间t s。
1 严+ y----解:c(t) =1 _ ---- e ~ sin(p 1 _U2豹n t + P)2 '二cos :二cos53.1° 二0.6t s 二 3.5 =3.2 =2.92(S)5n 1.2或:先根据c(t)求出系统传函,再得到特征参数,带入公式求解指标。
第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。
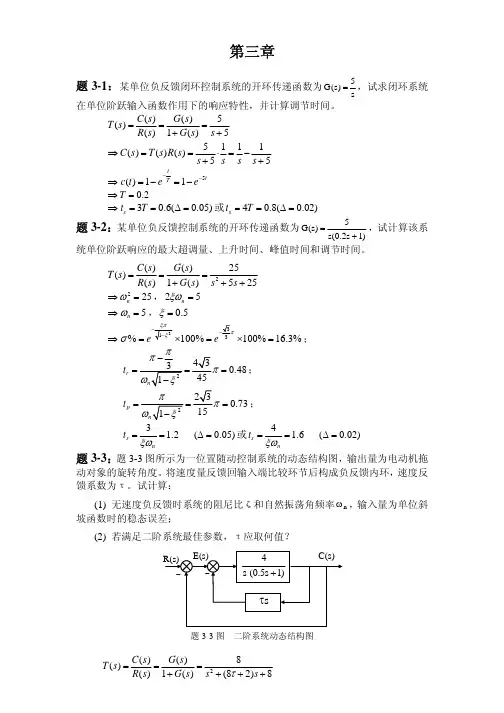
3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4s i n 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。

3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
第三章3-4 已知二阶系统的单位阶跃响应为1.20()1012.5sin(1.653.1)th t e t-=-+试求系统的超调量σ%、峰值时间tp和调节时间ts。
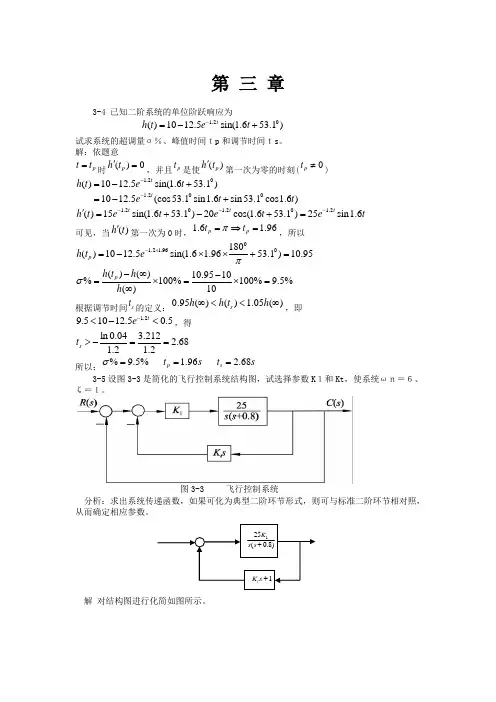
解:依题意pt t=时()0ph t'=,并且pt是使()ph t'第一次为零的时刻(pt≠)1.20()1012.5sin(1.653.1)th t e t-=-+1.2001012.5(cos53.1sin1.6sin53.1cos1.6)te t t-=-+1.20 1.20 1.2()15sin(1.653.1)20cos(1.653.1)25sin1.6t t th t e t e t e t---'=+-+=可见,当()h t'第一次为0时,1.6 1.96p pt tπ=⇒=,所以1.21.960180()1012.5sin(1.6 1.9653.1)10.95ph t eπ-⨯=-⨯⨯+=()()10.9510%100%100%9.5%()10ph t hhσ-∞-=⨯=⨯=∞根据调节时间st的定义:0.95()() 1.05()sh h t h∞<<∞,即1.29.51012.50.5te-<-<,得ln0.04 3.2122.681.2 1.2st>-==所以:%9.5% 1.96 2.68p st s t sσ===3-5设图3-3是简化的飞行控制系统结构图,试选择参数K1和Kt,使系统ωn=6、ζ=1。
图3-3 飞行控制系统分析:求出系统传递函数,如果可化为典型二阶环节形式,则可与标准二阶环节相对照,从而确定相应参数。
解对结构图进行化简如图所示。
故系统的传递函数为1121112525(0.8)()25(1)(0.825)251(0.8)t t K K s s s K K s s K K s K s s +Φ==++++++和标准二阶系统对照后可以求出:21120.81.44,0.312525nn t K K K ωζω-====3-7已知系统特征方程如下,试求系统在s 右半平面的根数及虚根值。
第3章 控制系统的时域分析【基本要求】1. 掌握时域响应的基本概念,正确理解系统时域响应的五种主要性能指标;2. 掌握一阶系统的数学模型和典型时域响应的特点,并能熟练计算其性能指标和结构参数;3. 掌握二阶系统的数学模型和典型时域响应的特点,并能熟练计算其欠阻尼情况下的性能指标和结构参数;4. 掌握稳定性的定义以及线性定常系统稳定的充要条件,熟练应用劳斯判据判定系统稳定性;5. 正确理解稳态误差的定义,并掌握系统稳态误差、扰动稳态误差的计算方法。
微分方程和传递函数是控制系统的常用数学模型,在确定了控制系统的数学模型后,就可以对已知的控制系统进行性能分析,从而得出改进系统性能的方法。
对于线性定常系统,常用的分析方法有时域分析法、根轨迹分析法和频域分析法。
本章研究时域分析方法,包括简单系统的动态性能和稳态性能分析、稳定性分析、稳态误差分析以及高阶系统运动特性的近似分析等。
根轨迹分析法和频域分析法将分别在本书的第四章和第五章进行学习。
这里先引入时域分析法的基本概念。
所谓控制系统时域分析方法,就是给控制系统施加一个特定的输入信号,通过分析控制系统的输出响应对系统的性能进行分析。
由于系统的输出变量一般是时间t 的函数,故称这种响应为时域响应,这种分析方法被称为时域分析法。
当然,不同的方法有不同的特点和适用范围,但比较而言,时域分析法是一种直接在时间域中对系统进行分析的方法,具有直观、准确的优点,并且可以提供系统时间响应的全部信息。
3.1 系统的时域响应及其性能指标为了对控制系统的性能进行评价,需要首先研究系统在典型输入信号作用下的时域响应过程及其性能指标。
下面先介绍常用的典型输入信号。
3.1.1 典型输入信号由于系统的动态响应既取决于系统本身的结构和参数,又与其输入信号的形式和大小有关,而控制系统的实际输入信号往往是未知的。
为了便于对系统进行分析和设计,同时也为了便于对各种控制系统的性能进行评价和比较,需要假定一些基本的输入函数形式,称之为典型输入信号。
3-3 解:该二阶系统的最大超调量:%100*21/ζζπσ--=ep当%5=pσ时,可解上述方程得:69.0=ζ当%5=pσ时,该二阶系统的过渡时间为:ns w t ζ3≈所以,该二阶系统的无阻尼自振角频率17.22*69.033==≈sn t w ζ3-4 解:由上图可得系统的传递函数:10)51(*2)1(*10)2()1(*101)2()1(*10)()(2++++==+++++=s K s Ks s s Ks s s Ks s R s C所以10=n w ,K w n 51+=ζ⑴ 若5.0=ζ时,116.0≈K 所以116.0≈K 时,5.0=ζ⑵ 系统单位阶跃响应的超调量和过渡过程时间分别为:9.110*5.033%3.16%100*%100*225.01/14.3*5.01/≈==≈==----ns pw t e eζσζζπ⑶ 加入)1(Ks +相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变化率)提高了,从而缩短了过渡时间:总之,加入)1(Ks +后,系统响应性能得到改善。
3-5 解:由上图可得该控制系统的传递函数:12110)110(10)()(K s s K s R s C +++=τ二阶系统的标准形式为:2222)()(nn nws w s w s R s C ++=ζ所以11021012+==τζn n w K w由5.0%5.91%100*21/2==-==--p pn p pt w t eσζπσζζπ可得85.76.0==n w ζ由11021012+==τζn n w K w 和85.76.0==n w ζ可得:64.0384.016.61=≈==ns w t K ζτ3-6 解:⑴ 列出劳斯表为:因为劳斯表首列系数符号变号2次,所以系统不稳定。
⑵ 列出劳斯表为:因为劳斯表首列系数全大于零,所以系统稳定。
自动控制原理第三章课后习题答案(免费)3-1 判别下列系统的能控性与能观性。
系统中a,b,c,d 的取值对能控性与能观性是否有关,若有关其取值条件如何?(1)系统如图所示。
题3-1(1)图 系统模拟结构图解: 状态变量:11223123434x ax u x bx x x x cx x x dx =+=-=+-=+输出变量: 3y x =由此写出状态空间:0001000011000010(0010)a b x x u c d Y x⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪=+ ⎪ ⎪- ⎪ ⎪⎝⎭⎝⎭= 223333[1,0,0,0],[,0,1,0],[,0,,1],[,0,,]T T T B AB a A B a a c A B a a ac c a c d ==-=--=-++---判断能控型:()2323221000001001c a a a U BABA BA B a c a ac c a c d ⎛⎫-- ⎪⎪== ⎪--++ ⎪ ⎪---⎝⎭4c rankU ≠,所以系统不完全能控,讨论系统能控性:判断能观性:022322222001011000C CA c U CA a c b c c CA a ac c b bc c c ⎛⎫⎛⎫ ⎪ ⎪-⎪ ⎪== ⎪ ⎪---- ⎪ ⎪++++-⎝⎭⎝⎭04rankU ≠,所以系统不能观.(2)系统如图所示。
题3-1(2)图 系统模拟结构图解: 状态变量:()1211101[,]1c x a b x ux c d y xa b U B AB c d -⎛⎫⎛⎫⎛⎫=+ ⎪ ⎪ ⎪--⎝⎭⎝⎭⎝⎭=-+⎛⎫== ⎪--⎝⎭若0,a b c d b ----≠则2c rankU =,系统能控.010C U CA a b ⎛⎫⎛⎫== ⎪ ⎪-⎝⎭⎝⎭若0b ≠,则02rankU =,系统能观.(3)系统如下式:1122331122311021010000200000x x x a ux x b x x y c d x y x ∙∙∙⎛⎫-⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪ ⎪=-+⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭ ⎪⎝⎭⎛⎫⎛⎫⎛⎫ ⎪= ⎪ ⎪⎪⎝⎭⎝⎭ ⎪⎝⎭解:系统如下:1231122311021010000200000x x x a u x b x y c d x y x -⎛⎫⎛⎫⎛⎫ ⎪⎪ ⎪=-+ ⎪⎪ ⎪ ⎪⎪ ⎪-⎝⎭⎝⎭⎝⎭⎛⎫⎛⎫⎛⎫ ⎪= ⎪ ⎪ ⎪⎝⎭⎝⎭ ⎪⎝⎭若0,0a b ≠≠,系统能控.若0,0c d ≠≠,系统能观.3-2 时不变系统:311113111111x x u y x ∙-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭⎛⎫= ⎪-⎝⎭试用两种方法判别其能控性与能观性。
3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。
第三章3-1已知系统脉冲响应 1.25()0.0125tk t e-=,试求系统闭环传递函数()s Φ。
解:由系统的脉冲响应 1.25()0.0125tk t e -=得0.0125() 1.25C s s=+ 又 ()1R s = 则()0.01251()() 1.2580100C s s R s s s Φ===++ 3-3单位反馈系统的开环传递函数4()(5)G s s s =+,求单位阶跃响应h(t)和调节时间t s 。
解:由开环传递函数4()(5)G s s s =+得闭环传递函数为2()4()1()54G s s G s s s Φ==+++则 单位阶跃响应24()()()(54)H s s R s s s s =Φ=++拉氏反变换得:441()133t t h t e e --=-+ ∵24()54s s s Φ=++ ∴24,25n n ωζω== 解得: 2, 1.25n ωζ==若取5%∆=,则得 31.2s nt s ζω≈=若取2%∆=,则得 41.6s nt s ζω≈=3-6机器人控制系统结构图如下图所示,试确定参数K 1 ,K 2,使系统阶跃响应的峰值时间0.5p t s =,超调量2%δ=。
解:由图可得 系统闭环传递函数1221()()1()K K G s s G s s as K Φ==+++对照二阶系统的数学模型有212,2,1n n K a K ωζω===又0.52%p t eδ==== 解得10.04,0.78n ωζ== 则1215.67,100.71,1a K K ===3-7设上题所示系统的单位阶跃响应如下图所示,试确定系统参数K 1 ,K 2和a 。
解:由图可知1()3,,0.13p p h t δ∞=== 又∵ 系统单位阶跃响应为:1221()()()()K K H s s R s s s as K =Φ=++ ∴20()lim ()3130.1p s p h sH s K et δ→∞=======解得 33.3,0.33n ωζ== 代入21,2n n K a ωζω== 有 1222,1106.5,3a K K ===3-8已知系统的特征方程,试判别系统的稳定性,并确定在s 右半平面根的个数及纯虚根。
(1)5432()22411100D s s s s s s =+++++=(2)5432()3122432480D s s s s s s =+++++=(3)54()220D s s s s =+--=(4)5432()2244825500D s s s s s s =+++--=解(1)各项系数均大于零,满足稳定的必要条件,列劳斯阵列如下5s1 2 114s 2 4 10 3s 0ε→ 62s 412εε-→-∞10 1s 6 0s10第一列元素符号改变两次,所以系统不稳定,且有两个s 右半平面的根。
(2)各项系数均大于零,满足稳定的必要条件,列劳斯阵列如下5s 1 12 32 4s 3 24 48 3s 4 162s 12 48 2()1248P s s =+ 1s 0 '()24P s s = 1s 24 1,22s j =±0s48即系统有一对共轭虚根1,22s j =±,没有s 右半平面的根,系统处于临界稳定状态。
(3)544()22(1)(2)0D s s s s s s =+--=-+= 解得1,,2s j =±±-则系统不稳定,有一对共轭纯虚根j ±,且s 右平面有一个根为1。
(4)543222()224482550(25)(1)(2)0D s s s s s s s s s =+++--=+-+=解得1,5,2s j =±±-则系统不稳定,有一对共轭纯虚根5j ±,且s 右平面有一个根为1。
3-9单位反馈系统的开环传递函数为()(3)(5)KG s s s s =++,为使系统特征根的实部不大于-1,试确定开环增益的取值范围。
解:系统闭环传递函数32()()1()815G s Ks G s s s s KΦ==++++则特征式32()8+15+D s s s s K =+ ∵极点在1s =-之左∴令11s s =-代入D (s )中,得321111()5+2-8+0D s s s s K =+=劳斯阵列表为31s 1 2 21s 5K -811s 185K- 01sK -8系统稳定,则 18058080K K K -⎧>⎪⎪->⎨⎪-+>⎪⎩解得 818K <<3-12已知单位反馈系统的开环传递函数为27(1)()(4)(22)s G s s s s s +=+++,试求当输入信号()r t 分别等于1()t ,t 和2t 时系统的稳定误差。
解:稳态误差01lim ()1()()ss s e sR s G s H s →=+由题意可知27(1)()(4)(22)s G s s s s s +=+++, H(s)=1○1当()1()r t t =时 1()R s s = 则220(4)(22)1lim 0(4)(22)7(1)ss s s s s s e ss s s s s s →+++=⋅=+++++ ○2当()r t t =时 21()R s s = 则2220(4)(22)18lim (4)(22)7(1)7ss s s s s s e s s s s s s s →+++=⋅=+++++ ○3当2()r t t =时 32()R s s= 则2230(4)(22)2lim (4)(22)7(1)ss s s s s s e s s s s s s s →+++=⋅=∞+++++3-13系统结构图如下图所示,已知12()()()1()r t n t n t t ===,试分别计算1(),()r t n t 和2()n t 作用时的稳态误差,并说明积分环节设置位置对减小输入和干扰作用下的稳态误差的影响。
解:○1()r t 作用时121(),(),()1(1)(1)K G s R s H s s T s T s s===++则系统稳态误差:120012(1)(1)1lim ()lim 01()()(1)(1)ss s s s T s T s e sR s G s H s s T s T s K →→++===++++○21()n t 作用时11()N s s= 干扰作用点与误差点之间的传递函数为11()1K G s T s =+则系统稳态误差:11001111lim ()lim ()ss s s T s e sN s G s K K→→+-===--○32()n t 作用时21()N s s=干扰作用点与误差点之间的传递函数为211()1K G s T s S =⋅+ 则系统稳态误差:12002(1)1lim ()lim 0()ss s s T s S e sN s G s K→→+-===-扰动作用下的稳态误差与扰动作用点之后积分环节无关,而与误差信号到扰动作用点之间的前向通道中的积分环节有关,增加积分环节可减小甚至消除稳态误差。
3-15单位反馈系统的开环传递函数为25()(5)G s s s =+(1)求各静态误差系数和2()120.5r t t t =++时的稳态误差ss e 。
(2)当输入作用10s 时的动态误差是多少?解:(1)静态位置误差系数025lim ()()lim(5)p s s k G s H s s s →→===∞+静态速度误差系数025lim ()()lim5(5)v s s sk sG s H s s s →→===+静态加速度误差系数220025lim ()()lim0(5)a s s s k s G s H s s s →→===+ 当2()120.5r t t t =++时23121()R s s s s =++ 稳态误差223001(5)121lim ()lim ()1()()(5)25ss s s s s e sR s G s H s s s s s s→→+==++=∞+++ (2)由已知可得1(5)()1()()(5)25e s s s G s H s s s +Φ==+++∵()()1(0),()()!i i i e ss i i C e t C r t i ∞==Φ=∑ 且2()120.5,'()2,''()1r t t t r t t r t =++=+=∴01211(0),'(0),''(0)052e e e C C C =Φ=Φ==Φ= 故1()(2)5ss e t t =+ 则 当输入作用10s 时,动态误差(10) 2.4ss e =。