虚拟样机仿真与测试实验
- 格式:docx
- 大小:149.00 KB
- 文档页数:3
多学科系统级虚拟样机建模与仿真技术本文从当前产品设计过程对多学科联合仿确实需求出发,分析了产品协同设计对仿真技术三个层次的功能需求,并引出当前实现多学科集成仿确实通常方法。
多学科联合仿真需要操纵、机构、有限元等不一致仿真环境的集成与数据交换,MSC.Software提供最为系统与完整的多学科协同仿真开发环境,本文全面介绍了MSC.Software多学科系统级虚拟样机建模与仿确实解决方案,并给出了具体的实例。
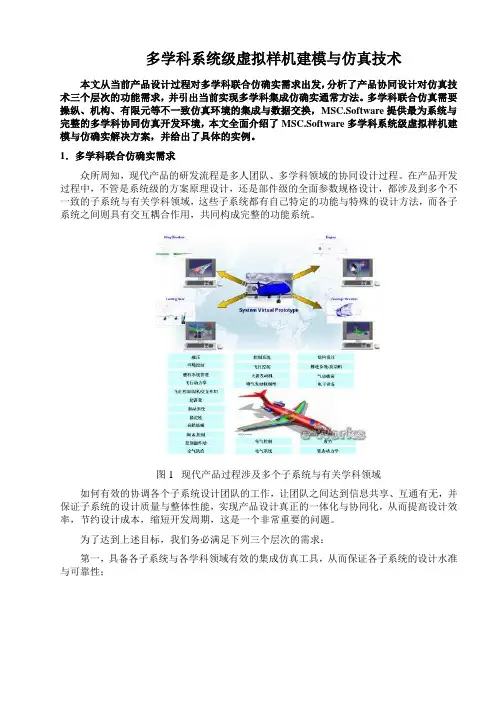
1.多学科联合仿确实需求众所周知,现代产品的研发流程是多人团队、多学科领域的协同设计过程。
在产品开发过程中,不管是系统级的方案原理设计,还是部件级的全面参数规格设计,都涉及到多个不一致的子系统与有关学科领域,这些子系统都有自己特定的功能与特殊的设计方法,而各子系统之间则具有交互耦合作用,共同构成完整的功能系统。
图1 现代产品过程涉及多个子系统与有关学科领域如何有效的协调各个子系统设计团队的工作,让团队之间达到信息共享、互通有无,并保证子系统的设计质量与整体性能,实现产品设计真正的一体化与协同化,从而提高设计效率,节约设计成本,缩短开发周期,这是一个非常重要的问题。
为了达到上述目标,我们务必满足下列三个层次的需求:第一,具备各子系统与各学科领域有效的集成仿真工具,从而保证各子系统的设计水准与可靠性;图2 各学科领域的不一致设计工具第二,能够实现各仿真工具之间的无缝集成与数据交换,在统一架构下实现模型整合;第三,为了能够协调与管理各设计团队,与在设计过程中产生的大量数据,实现资源优化配置,还务必具有仿真数据与流程的管理平台,实现各学科领域的真正协同仿真。
2.多学科协同仿确实通常实现方法目前较为通用与流行的实现多学科集成仿确实方法要紧包含下列三种:2.1 联合仿真式(Co-Simulation)联合仿真式是目前较为通用,也是使用最多的一种数据交换方式,其数据交换原理如图3所示,两个不一致仿真工具之间通过TCP/IP等方式实现数据交换与调用。

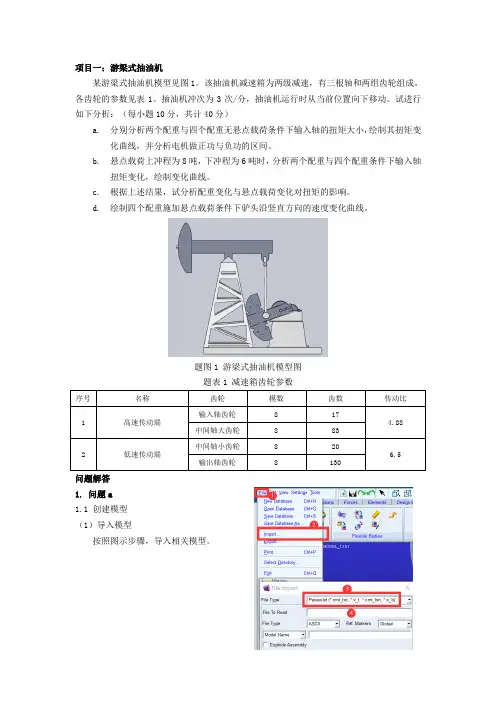
项目一:游梁式抽油机某游梁式抽油机模型见图1。
该抽油机减速箱为两级减速,有三根轴和两组齿轮组成。
各齿轮的参数见表1。
抽油机冲次为3次/分,抽油机运行时从当前位置向下移动。
试进行如下分析:(每小题10分,共计40分)a.分别分析两个配重与四个配重无悬点载荷条件下输入轴的扭矩大小,绘制其扭矩变化曲线,并分析电机做正功与负功的区间。
b.悬点载荷上冲程为8吨,下冲程为6吨时,分析两个配重与四个配重条件下输入轴扭矩变化,绘制变化曲线。
c.根据上述结果,试分析配重变化与悬点载荷变化对扭矩的影响。
d.绘制四个配重施加悬点载荷条件下驴头沿竖直方向的速度变化曲线。
题图1 游梁式抽油机模型图题表1 减速箱齿轮参数序号名称齿轮模数齿数传动比1 高速传动端输入轴齿轮8 174.88 中间轴大齿轮8 832 低速传动端中间轴小齿轮8 206.5 输出轴齿轮8 130问题解答1. 问题a1.1 创建模型(1)导入模型按照图示步骤,导入相关模型。
(2)简化模型先对各个零部件进行重命名,然后再进行模型的简化。
在进行模型简化时,需要通过布尔运算将两个无相对运动并且有接触的部件进行布尔操作。
简化后如图:1.2添加约束(1)固定副按照图示过程,在连接中选择固定副。
考虑系统整体的运动过程和规律,确定相对于地面不发生运动的部件及各部件相互之间没有相对运动的部件,创建固定副。
(2)旋转副在左侧的图标中选择旋转副,默认的就是2 Bodies-1Locations,依次选择第一个body 和第二个body,然后选择旋转副的位置,即可创建旋转副。
确定旋转副位置时注意要选择中心位置。
图示左半部分为创建过程,右半部分为创建完成后的旋转副。
(3)齿轮副由齿轮副的命令窗口可以看出,齿轮副实际上是在确定的位置上(common velocity maker)、于两个相对于大地的旋转副之间创建的,所以我们在上文建立了齿轮轴与大地之间的的转动副。
再创建同速标记点。

虚拟样机实验总结引言在计算机科学领域,虚拟样机(Virtual Machine,简称VM)是一种软件仿真的方式,能够在计算机上模拟出另一台计算机的行为。
通过使用虚拟样机,我们可以在一个物理计算机上同时运行多个独立的操作系统,并实现资源的有效共享。
本文将总结我在虚拟样机实验中的学习和体会。
虚拟样机的定义和原理虚拟样机是利用软件技术在一台物理计算机上模拟出另一台计算机的行为。
它通过实现虚拟化技术,将物理计算机的资源(如CPU、内存和硬盘)划分为多个逻辑控制台,并为每个逻辑控制台提供独立的运行环境。
这样,每个逻辑控制台就可以运行一个独立的操作系统和应用程序。
虚拟样机的实现依赖于两个主要组件:虚拟机监视器(Virtual Machine Monitor,简称VMM)和虚拟机(Virtual Machine,简称VM)。
VMM是虚拟样机的核心组件,它负责管理和控制虚拟机的创建、启动、停止和销毁等操作。
虚拟机是VMM创建的具体实例,它包含了一个完整的操作系统和应用程序环境。
虚拟样机实验过程在虚拟样机实验中,我使用了一款名为VirtualBox的虚拟化软件来搭建虚拟样机环境。
下面是实验的具体步骤:1.下载并安装VirtualBox软件:在官方网站上下载适合自己操作系统的版本,并按照提示进行安装。
2.创建虚拟机:打开VirtualBox软件,点击“新建”按钮,按照向导的指引创建一个新的虚拟机。
在这个过程中,需要选择虚拟机的操作系统类型、内存大小、硬盘空间等配置。
3.安装操作系统:将操作系统的安装媒介(如光盘镜像文件或USB设备)连接到虚拟机,并启动虚拟机。
按照操作系统安装向导的指引,完成系统的安装过程。
4.配置网络环境:在虚拟机的设置界面中,配置网络适配器的类型和连接方式,以便虚拟机可以与物理计算机进行网络通信。
5.运行虚拟机:选中虚拟机,点击“启动”按钮,启动虚拟机并进入操作系统界面。
在虚拟机中可以进行各种操作和测试,如安装软件、配置网络、运行应用程序等。
一.ADAMS软件简介虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI(Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。
ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex 等[3]。
1.1ADAMS软件概述ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。
如果在产品的概念设计阶段就采取ADAMS进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。
ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。
目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。
虚拟仿真实训实习报告随着科技的飞速发展,虚拟仿真技术在各个领域得到了广泛的应用。
作为一名实习生,我有幸参与了虚拟仿真实训项目,通过这次实习,我对虚拟仿真技术有了更深入的了解,同时也收获了许多宝贵的经验。
一、实习内容本次实习主要涉及虚拟仿真技术的应用,包括虚拟现实(VR)、增强现实(AR)和混合现实(MR)等方面。
在实习过程中,我们学习了虚拟仿真软件的使用,如Unity、Unreal Engine等,并通过实际操作,完成了一个个具有代表性的项目。
此外,我们还学习了虚拟样机的设计与制造,通过数字孪生技术,将实体模型转化为虚拟模型,实现对实体模型的仿真分析和优化设计。
二、实习过程在实习过程中,我们首先接受了虚拟仿真技术的基础培训,了解了虚拟现实、增强现实和混合现实等概念,并掌握了相关软件的操作方法。
随后,我们以小组为单位,开展了一个个项目的实践。
在项目实践中,我们充分发挥团队协作精神,共同分析问题、解决问题,最终完成了各自的任务。
印象深刻的是,在虚拟样机设计项目中,我们需要为一款汽车制造一个虚拟样机。
通过数字孪生技术,我们将汽车实体模型转化为虚拟模型,并在虚拟环境中对其进行仿真分析。
在这个过程中,我们不仅学会了如何利用虚拟仿真技术进行产品设计,还学会了如何通过仿真数据对产品进行优化。
最后,我们成功完成了虚拟样机的制造,并得到了指导老师的认可。
三、实习收获通过本次实习,我深刻认识到虚拟仿真技术在工程设计、产品制造等领域的重要作用。
虚拟仿真技术能够帮助我们更好地理解复杂系统,提高设计效率,降低生产成本。
同时,我也学会了如何运用虚拟仿真技术进行问题分析和解决。
此外,实习过程中的团队协作让我更加明白了团队合作的重要性。
在实际工作中,我们需要与不同背景的同事共同协作,发挥各自的优势,共同完成任务。
这次实习让我学会了如何与他人沟通、协作,提高了我的团队协作能力。
四、实习总结回顾这次虚拟仿真实训实习,我深感收获颇丰。
基于虚拟样机的产品设计与模拟仿真在当今数字化时代,虚拟样机成为了产品设计领域的一项重要技术。
利用虚拟样机,设计师可以在计算机上进行产品设计和模拟仿真,大大提高了设计效率和准确性。
本文将介绍虚拟样机的概念、应用领域以及设计与仿真流程。
一、虚拟样机的概念虚拟样机即Virtual Prototype,是指通过计算机技术将产品的实体模型、工作原理和性能特点等数字化,用虚拟形式展现出来的产品模型。
虚拟样机实际上是物理样机的电子化替代品,可以帮助设计师更加直观地了解产品的各个方面,并进行全面的仿真分析。
二、虚拟样机的应用领域虚拟样机的应用非常广泛,几乎涵盖了所有产品设计领域。
以下是一些常见的应用领域:1. 机械产品设计:在机械产品设计中,虚拟样机可以帮助设计师进行结构分析、装配过程仿真、运动学仿真等,提前发现潜在问题并进行优化设计。
2. 电子产品设计:对于电子产品设计而言,虚拟样机可以帮助设计师进行电路仿真、信号传输分析、热模拟等,以保证产品的功能和性能。
3. 建筑设计:在建筑设计中,虚拟样机可以帮助设计师进行空间布局仿真、光影效果模拟、结构稳定性分析等,提高设计质量和效率。
4. 汽车设计:在汽车设计中,虚拟样机可以帮助设计师进行车辆动力学仿真、燃油经济性分析、碰撞模拟等,以提升汽车的安全性和性能。
5. 医疗器械设计:在医疗器械设计中,虚拟样机可以对产品的材料特性、医疗效果进行仿真,提供前期验证和改进的依据。
三、虚拟样机的设计与仿真流程虚拟样机的设计与仿真流程可以分为以下几个步骤:1. 数据收集与建模:根据产品的实际情况,收集所需的相关数据并进行建模。
这一步骤非常重要,因为准确的数据和建模是保证仿真结果准确性的基础。
2. 功能模拟与优化:根据产品的功能要求,进行虚拟样机的功能模拟,并进行针对性的优化设计。
通过多次的仿真分析和优化设计,提高产品的性能和可靠性。
3. 材料选择与特性分析:根据产品的工作环境和要求,选择合适的材料,并对材料的热特性、力学特性等进行仿真分析,以保证产品的稳定性和安全性。
机械设计中的仿真与虚拟样机技术随着科技的不断进步和发展,虚拟技术在机械设计领域中发挥着越来越重要的作用。
仿真与虚拟样机技术不仅提高了产品设计的效率和准确性,还降低了成本和风险。
本文将深入探讨机械设计中的仿真与虚拟样机技术的应用及其优势。
一、仿真技术在机械设计中的应用在机械设计过程中,仿真技术通过建立数学模型和模拟实验的方式,模拟真实工作环境,评估产品性能和可行性。
具体应用包括但不限于以下几个方面:1. 力学仿真通过计算机辅助工程软件,可以对机械零件的力学性能进行仿真分析。
例如,可以分析零件在各种载荷下的应力、变形和疲劳寿命等。
这样可以避免实际零件在使用过程中出现失效和故障的问题,提高产品的可靠性。
2. 流体仿真在涉及流体传输的机械设计中,流体仿真技术可以模拟液体或气体在设备中的流动情况。
通过分析压力、流速、流向等参数,可以优化管道系统、减小能量损失,并确保流体系统的正常运行。
3. 热仿真热仿真技术可以模拟机械设备在工作过程中的热传导和热辐射等现象。
例如,在发动机设计中,通过热仿真分析可以评估冷却系统的性能,优化散热结构,确保发动机在高温环境下的正常工作。
4. 控制系统仿真控制系统是机械设备的重要组成部分,仿真技术可以对控制系统进行模拟和验证。
通过仿真分析,可以调试控制参数,提高系统的响应速度和稳定性,并降低调试成本和风险。
二、虚拟样机技术在机械设计中的应用虚拟样机技术是指通过计算机模拟和虚拟现实技术,创建出真实的虚拟产品原型。
虚拟样机可以在设计阶段进行展示和验证,具体应用包括但不限于以下几个方面:1. 形状设计与展示虚拟样机技术可以将设计图纸转化为具有真实外观和质感的虚拟产品原型。
设计师可以通过虚拟样机对产品的外观进行微调和展示,从而更好地满足客户的需求和审美要求。
2. 功能检验与优化通过虚拟样机,设计师可以模拟产品的各项功能,并进行性能测试。
例如,在汽车设计中,虚拟样机可以模拟车辆行驶、转弯等过程,从而检验和优化车辆的操控性能和安全性能。
虚拟样机仿真与测试实验
实验目的
了解ADAMS软件的建模和分析方法;
初步掌握ADAMS进行机构参数化建模的方法;
初步掌握ADAMS添加运动约束、运动驱动、仿真分析、参数测量。
实验参数
图所示为某机器的曲柄滑块机构,圆盗1以n= 60r /min的转速逆时针旋转,
在滑块的端部作用有载荷F, F的方向与滑块运动的方向相反。
已知:圆盘1的半径R
=350mm 厚度3= 100mm 材料密度为7. 8X 10-3kg /cm3;连杆 2 长度L = 1100mm 宽度w= 150mm 厚度3= 50mm 质量Q= 65kg,惯性矩Ixx = 0.132kg - m2 Iyy = 6.80kg - m2 Izz = 6.91 kg • m2,滑块3长度L= 400mm高度h= 300mm厚度3 = 300mm材料为黄铜。
试进行以下的建模和分析:
1)确定滑块酌位置、速度和加速度。
2)裁荷F=l00kN时,确定所需的圆盘驱动力矩;3)设置驱动力矩,测量滑块的位置和速度。
实验结果
时间一位移曲线
piston Displacement —piston Cl/ Position X u
i g
E ) §匸^
10 15 2.Q 2.5 Analysis Last^Run
Time (sec) 2012-04-12 11:18 16 时间一速度曲线
piston CM Velpcity X 「me 底匸) 2012-04-12 11 18:16 T
-P
Z-.」
.H
D
一
:2r .--J -l Analysis Last_Run
时间一加速度曲线
F o
a
s A s OJ E )匸口曾」E -piston CM Ac cetera!bon X 100 5.0 0.0 ■5 0 -10.0 ■15.0 -20.Q pistonpump 1 0 1 5 2Q 2 5 Trneisec) QQ 0 5 "Tknalvsis La5t Run 2012-04^12 11 18 16 时间一驱动力矩曲线 pistcnpump —MOTION 1 TZ 」£q>E
・c
□
舊
匚
四、数据分析
用MATLAB计算得到的图形:
通过对比图形和数据,不难发现:ADAMS中计算的滑块位移与MATLAB中计算的略有不同,每个时间点比MATLAB中滑块位移大0.05m,产生这种差别的原因可能是用MATLAB
计算时是以杆1为主动轴计算的,而用ADAMS计算时是以质心计算的。
两种软件中计算的速度、加速度随时间变化曲线基本一致。
因此,两种计算结果没有太大差异。
五、收获和体会
通过本次实验、我初步掌握了ADAMS的基本用法,也在实验中提高了自己的自学能力。
并在与MATLAB的数值比较中对曲柄滑块的运动规律有了更深的了解。