机械设计 计算公式
- 格式:xls
- 大小:101.50 KB
- 文档页数:17
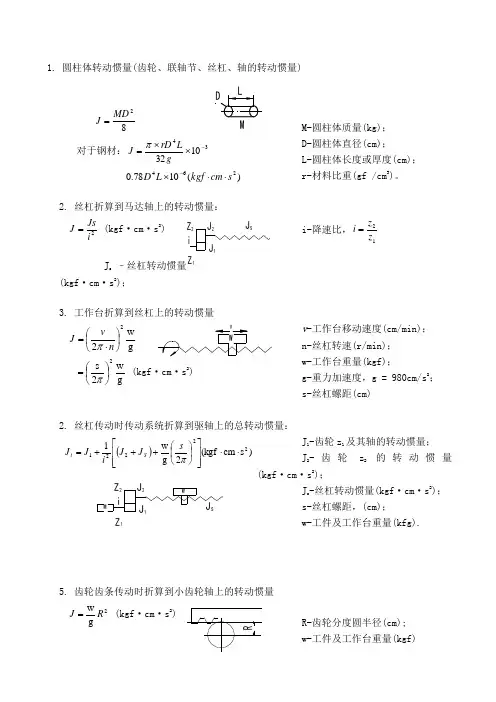
1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD J π)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg); D-圆柱体直径(cm); L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:2i Js J =(kgf·c m·s 2)J s (kgf·c m·s 2); i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量gw22⎪⎭⎫ ⎝⎛⋅=n v J π g w 2s 2⎪⎭⎫ ⎝⎛=π (kgf·c m·s 2) v -工作台移动速度(cm/min); n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J iJ J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2);J s -丝杠转动惯量(kgf ·cm ·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J =(kgf ·c m·s 2)R-齿轮分度圆半径(cm); w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·c m·s 2);R-齿轮z 分度圆半径(cm); w-工件及工作台重量(kgf)。
机械设计计算公式机械设计是指利用机械原理和机械工程学知识设计制造各种机械装置、机械零部件以及机械系统,以满足工程技术要求和使用要求的工程领域。
在机械设计中,经典的计算公式是非常重要的工具,用于解决各种设计问题和计算设计参数。
本文将介绍几个经典的机械设计计算公式,并给出详细的说明。
1.扭矩和功率计算公式扭矩和功率是机械运动过程中常用的两个参数,它们之间存在一定的关系。
对于旋转运动的机械系统,扭矩和功率的计算公式如下:扭矩T=P/(ω×n)功率P=T×ω×n其中,T表示扭矩,P表示功率,ω表示角速度,n表示转速。
根据这两个公式,我们可以根据已知条件计算扭矩和功率,或者通过已知扭矩和功率计算转速和角速度。
2.强度和刚度计算公式在机械设计中,强度和刚度是两个重要的设计参数。
强度是指机械零部件在工作过程中能够承受的最大应力,而刚度是指机械零部件在受力情况下的变形程度。
对于常见的机械零部件,强度和刚度的计算公式如下:强度S=F/A刚度K=F/Δl其中,S表示强度,F表示受力,A表示受力面积,K表示刚度,Δl 表示变形量。
根据这两个公式,我们可以根据已知条件计算出零件的强度和刚度,以确保零件在工作过程中的可靠性和稳定性。
3.速度和加速度计算公式在机械运动的设计中,速度和加速度是两个重要的参数,它们与机械系统的动态性能密切相关。
对于直线运动的机械系统,速度和加速度的计算公式如下:速度v=s/t加速度a=(v-u)/t其中,v表示速度,s表示位移,t表示时间,u表示初速度。
根据这两个公式,我们可以根据已知条件计算出机械系统的速度和加速度,从而优化机械系统的动态性能。
总结起来,机械设计中经典的计算公式涵盖了扭矩和功率、强度和刚度、速度和加速度等多个方面。
这些计算公式为机械工程师提供了有效的工具和方法,用于解决各种设计问题和计算设计参数,在机械设计过程中起到了重要的作用。
机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s 运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH 机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2 机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
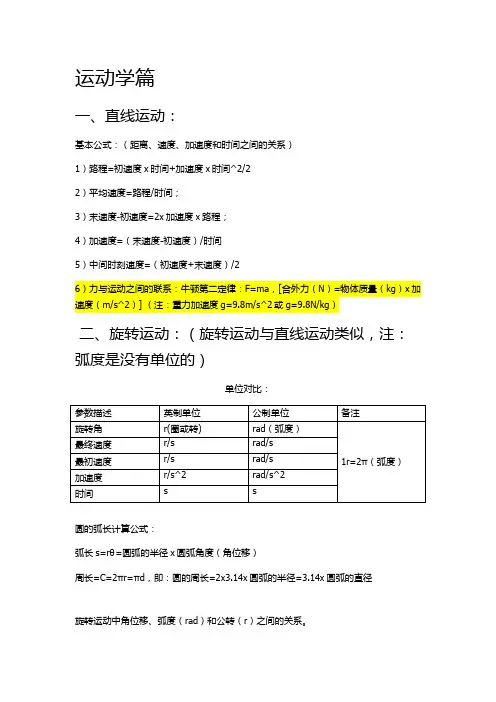
运动学篇一、直线运动:基本公式:(距离、速度、加速度和时间之间的关系)1)路程=初速度x时间+加速度x时间^2/22)平均速度=路程/时间;3)末速度-初速度=2x加速度x路程;4)加速度=(末速度-初速度)/时间5)中间时刻速度=(初速度+末速度)/26)力与运动之间的联系:牛顿第二定律:F=ma,[合外力(N)=物体质量(kg)x加速度(m/s^2)] (注:重力加速度g=9.8m/s^2或g=9.8N/kg)二、旋转运动:(旋转运动与直线运动类似,注:弧度是没有单位的)单位对比:圆的弧长计算公式:弧长s=rθ=圆弧的半径x圆弧角度(角位移)周长=C=2πr=πd,即:圆的周长=2x3.14x圆弧的半径=3.14x圆弧的直径旋转运动中角位移、弧度(rad)和公转(r)之间的关系。
1)1r(公转)=2π(弧度)=360°(角位移)2)1rad=360°/(2π)=57.3°3)1°=2π/360°=0.01745rad4)1rad=0.16r5)1°=0.003r6)1r/min=1x2x3.14=6.28rad/min7)1r/min=1x360°=360°/min三、旋转运动与直线运动的联系:1)弧长计算公式(s=rθ):弧长=圆弧的半径x圆心角(圆弧角度或角位移)2)角速度(角速度是角度(角位移)的时间变化率)(ω=θ/t):角速度=圆弧角度/时间注:结合上式可推倒出角速度与圆周速度(即:s/t也称切线速度)之间的关系。
S3)圆周速度=角速度x半径,(即:v=ωr)注:角度度ω的单位一般为rad/s,实际应用中,旋转速度的单位大多表示为r/min (每分钟多少转)。
可通过下式换算:1rad/s=1x60/(2x3.14)r/min例如:电机的转速为100rad/s的速度运行,我们将角速度ω=100rad/s换算成r/min 单位,则为:ω=100rad/s=100x60/(2π)=955r/min4)rad/s和r/min的联系公式:转速n(r/min)= ω(rad/s)x60/(2π),即:转速(r/min)=角速度(rad/s)x60/(2π);5)角速度ω与转速n之间的关系(使用时须注意单位统一):ω=2πn,(即:带单位时为角速度(rad/s)=2x3.14x转速(r/min)/60)6)直线(切线)速度、转速和2πr(圆的周长)之间的关系(使用时需注意单位):圆周速度v=2πrn=(πd)n注:线速度=圆周速度=切线速度四、转矩计算公式:(1)普通转矩:T=Fr即:普通转矩(N*m)=力(N)x半径(m);(2)加速转矩:T=Jα即:加速转矩(N*m)=角加速度α(rad/s^2)x转动惯量J(kg*m^2)单位换算:转动惯量J(kg*cm^2):1kg*cm^2=10^-6kg*m^2;角加速度α(rad/s^2):1r/s^2=1x2xπrad/s^2;单位转换过程推导:(注:kgf*m(千克力*米),1kgf*m=9.8N*m,g=9.8N/kg=9.8m/s^2)假设转动惯量J =10kg*m^2,角加速度α=10rad/s^2,推导出转矩T的单位过程如下:T=J x α=10x(kg*m^2)x10(rad/s^2)=100(kgf*m/s^2)=()()()=100N*m两个简化单位换算公式:(注:单位换算其物理含义也不同,下式仅用于单位换算过程中应用。
机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
机械设计计算公式汇总
机械设计是工程设计中的重要组成部分之一,需要掌握一定的设计知识和计算方法。
本文将介绍常见的机械设计计算公式汇总,希望能够为机械设计工作者提供一些参考。
1. 齿轮传动计算公式:
- 齿轮的基本公式:〖(tanα=n₂u₂/n₁u₁)〗^2+1=〖(d₁/d₂)〗^2 - 齿轮轮廓线齿数:Z=(2d₀/∏)tanα
- 齿轮模数: m=d₀/Z
- 齿轮载荷:Ft=2T/d₀,Fr=Ft/tanα
2. 轴承选型计算公式:
- 基本动负荷额定值:P=Fr
- 动荷重系数:f₂=C₂/P
- 等效动荷重:P_1=(X_Fr+Y_Fa)_e
- 等效动荷重系数:f_1=C_1/P_1
3. 机床切削力计算公式:
- 切削力公式:Fc=kC (k为切削力系数,C为切削力矢量和)
- 切削力系数的计算方法:k=αT^b+c
4. 泵的性能计算公式:
- 扬程公式:H=(p_2-p_1)/ρg+H_s
- 流量公式:Q=3600VA/N
- 效率计算公式:η_m=H_p/H_f
以上是机械设计中常见的计算公式,实际设计过程中需要根据具体情况进行合理的使用和调整,以确保设计方案能够达到预期效果。
非标机械设计中常用计算公式一、单位最基本的知识点,就不用多讲了。
米制单位:3 个基本单位 : 国际单位制 (SI)•质量 : m 单位 : 千克 (kg)•长度 : l 单位 : 米 (m)•时间 : t 单位 : 秒 (s)运动学线加速度和角加速度功率英制单位有时候一些机器和零件在工作中会遇到英制单位,需要对英制单位有一定的了解,并进行简单的换算。
质量,重量,力 :单位 : 磅 (lb) [盎司 (oz) : 1 lb= 16 oz ]长度 :单位 : 英寸 (in) [1英尺 (ft) =12 英寸 - 1 码 (yd) = 3英尺]时间 :单位 : 秒 (s)线速度 :单位 : 英寸每秒 (in/s)线加速度 :单位 :英寸每平方秒 (in/s2)力矩:单位 : 英寸磅 (in.lb)惯量 :单位 : 英寸磅平方秒 (in.lb.s2)等效的米制和英制单位(换算)重量 :1 pound (lb) = 453,59237 g = 0, kg = 4,44822 N长度 :1 inch (in) = 2,54 cm = 0,0254 m力矩 :1 inch pound (in.lb) = 0,1130234 Nm惯量 :1 inch pound second square (in.lb.s2) = 0,112961 kg.m2重力加速度 :g = 386 in/s2 = 32,12 ft/s2 = 9,81 m/s2二、机械公式运动无外乎两种:直线和角度运动直线运动 :角度运动 :动能:三、一些惯量的计算密度:单位 : 千克每立方米 (Kg/m3) 磅每立方英尺 (lb/in3)某个体积承载的重量取决于构成的材料.根据形状做体积计算:长方体时:实心圆柱体:空心圆柱体:力臂和质量:常用的转动惯量计算公式表:。
机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
一、直线运动基本公式:(距离、速度、加速度和时间之间的关系)1)路程=初速度 x 时间+21*2加速度时间 2)平均速度=路程/时间;3)末速度-初速度=2x 加速度 x 路程; 4)加速度=(末速度-初速度)/时间 5)中间时刻速度=12(初速度+末速度) 6)力与运动之间的联系:牛顿第二定律:F=ma ,[合外力(N )=物体质量(kg )x 加 速度(2/m s )] (注:重力加速度 g=9.82/m s 或 g=9.8N/kg )二、旋转运动单位对比:圆的弧长计算公式:弧长 s=r θ=圆弧的半径 x 圆弧角度(角位移)周长=C=2πr=πd ,即:圆的周长=2x3.14x 圆弧的半径=3.14x 圆弧的直径 旋转运动中角位移、弧度(rad )和公转(r )之间的关系。
1)1r (公转)=2π(弧度)=360°(角位移)2)1rad=3602π=57.3° 3)1°=2360π=0.01745rad 4)1rad=0.16r 5)1°=0.003r6)1r/min=1x2x3.14=6.28rad/min 7) 1r/min=1x360°=360°/min三、旋转运动与直线运动的联系:1)弧长计算公式(s=r θ):弧长=圆弧的半径 x 圆心角(圆弧角度或角位移) 2)角速度(角速度是角度(角位移)的时间变化率)(ω=θ/t ):角速度=圆弧角度/时间注:结合上式可推倒出角速度与圆周速度(即:s/t 也称切线速度)之间的关系。
3)圆周速度=角速度 x 半径,(即:v=ωr )注:角度度ω的单位一般为 rad/s ,实际应用中,旋转速度的单位大多表示为 r/min (每分钟多少转)。
可通过下式换算: 1rad/s=1x60/(2x3.14)r/min例如:电机的转速为 100rad/s 的速度运行,我们将角速度ω=100rad/s 换算成 r/min 单位,则为: ω=100rad/s=100*602π=955r/min 4)rad/s 和 r/min 的联系公式: 转速 n(r/min)=*2/60rad s ω()π,即:转速(r/min )=/*602rad s π角速度();5)角速度ω与转速 n 之间的关系(使用时须注意单位统一):ω=2πn ,(即:带单位时为角速度(rad/s )=2x3.14x 转速(r/min )/60)6)直线(切线)速度、转速和 2πr (圆的周长)之间的关系(使用时需注意单位):圆周速度 v=2πrn=(πd )n 注:线速度=圆周速度=切线速度 四、转矩计算公式: (1)普通转矩:T=Fr即:普通转矩(N*m )=力(N )x 半径(m ); (2)加速转矩:T=J α即:加速转矩(N*m )=角加速度α(2rad s)x 转动惯量 J (2*kg m ) 单位换算:转动惯量 J (2*kg cm ):12*kg cm =610 2*kg m ; 角加速度α(2rad s ):12rad s =1x2x π2rads; 单位转换过程推导:(注:kgf*m (千克力*米),1kgf*m=9.8N*m , g=9.8N/kg=9.82/m s )假设转动惯量 J =10kg*2m ,角加速度α=10rad/2s ,推导出转矩 T 的单位过程如下: T=J x α=10x (kg*2m )x10(rad/2s ) =100(kgf*m/2s )=222100(*/)*9.8(/)9.8(/)kg m s N kg m s=100N*m两个简化单位换算公式:(注:单位换算其物理含义也不同,下式仅用于单位换算过程中应用。
运动学篇一、直线运动:基本公式:(距离、速度、加速度和时间之间的关系)1)路程=初速度x时间+加速度x时间^2/22)平均速度=路程/时间;3)末速度-初速度=2x加速度x路程;4)加速度=(末速度-初速度)/时间5)中间时刻速度=(初速度+末速度)/26)力与运动之间的联系:牛顿第二定律:F=ma,[合外力(N)=物体质量(kg)x加速度(m/s^2)] (注:重力加速度g=9.8m/s^2或g=9.8N/kg)二、旋转运动:(旋转运动与直线运动类似,注:弧度是没有单位的)单位对比:圆的弧长计算公式:弧长s=rθ=圆弧的半径x圆弧角度(角位移)周长=C=2πr=πd,即:圆的周长=2x3.14x圆弧的半径=3.14x圆弧的直径旋转运动中角位移、弧度(rad)和公转(r)之间的关系。
1)1r(公转)=2π(弧度)=360°(角位移)2)1rad=360°/(2π)=57.3°3)1°=2π/360°=0.01745rad4)1rad=0.16r5)1°=0.003r6)1r/min=1x2x3.14=6.28rad/min7)1r/min=1x360°=360°/min三、旋转运动与直线运动的联系:1)弧长计算公式(s=rθ):弧长=圆弧的半径x圆心角(圆弧角度或角位移)2)角速度(角速度是角度(角位移)的时间变化率)(ω=θ/t):角速度=圆弧角度/时间注:结合上式可推倒出角速度与圆周速度(即:s/t也称切线速度)之间的关系。
S3)圆周速度=角速度x半径,(即:v=ωr)注:角度度ω的单位一般为rad/s,实际应用中,旋转速度的单位大多表示为r/min (每分钟多少转)。
可通过下式换算:1rad/s=1x60/(2x3.14)r/min例如:电机的转速为100rad/s的速度运行,我们将角速度ω=100rad/s换算成r/min 单位,则为:ω=100rad/s=100x60/(2π)=955r/min4)rad/s和r/min的联系公式:转速n(r/min)= ω(rad/s)x60/(2π),即:转速(r/min)=角速度(rad/s)x60/(2π);5)角速度ω与转速n之间的关系(使用时须注意单位统一):ω=2πn,(即:带单位时为角速度(rad/s)=2x3.14x转速(r/min)/60)6)直线(切线)速度、转速和2πr(圆的周长)之间的关系(使用时需注意单位):圆周速度v=2πrn=(πd)n注:线速度=圆周速度=切线速度四、转矩计算公式:(1)普通转矩:T=Fr即:普通转矩(N*m)=力(N)x半径(m);(2)加速转矩:T=Jα即:加速转矩(N*m)=角加速度α(rad/s^2)x转动惯量J(kg*m^2)单位换算:转动惯量J(kg*cm^2):1kg*cm^2=10^-6kg*m^2;角加速度α(rad/s^2):1r/s^2=1x2xπrad/s^2;单位转换过程推导:(注:kgf*m(千克力*米),1kgf*m=9.8N*m,g=9.8N/kg=9.8m/s^2)假设转动惯量J =10kg*m^2,角加速度α=10rad/s^2,推导出转矩T的单位过程如下:T=J x α=10x(kg*m^2)x10(rad/s^2)=100(kgf*m/s^2)=()()()=100N*m两个简化单位换算公式:(注:单位换算其物理含义也不同,下式仅用于单位换算过程中应用。
1.平面机构的自由度(公式:Fn=3n -2Pl -Ph )2.瞬心(简答)三心定理(公式:N=2)1(-k k K 为构件个数) 3.铰链四杆机构的曲柄存在条件:平面连杆机构(公式:L min +L max ≤L x +L y )①双曲柄 :最短杆为机架② 曲柄摇杆:最短杆对边为机架4.铰链四杆机构的基本形成和特征 ③双摇杆:杆最短杆为机架对边④L min +L max > L x +L y 为双摇杆5. 平面四杆机构的演化:双摇杆,曲柄摇杆,双曲柄摇杆,曲柄滑块。
6. 铰链四杆机构的设计:作图题,(公式θ=180°11+-k k )。
7. 死点位置:摇杆为主动件,曲柄和连杆共线时出现死点位置。
①盘形,移动,圆柱②尖顶,滚子,平顶8.凸轮机构的应用和类 ③直动,摆动④对心(e=0),偏置9.图解法设计凸轮轮廓:先画轮廓线,偏置圆(从动件导路切线),基圆(圆心到轮廓线最近点为R )利用反转法作偏置圆的切线即速度方向,(起始位置导路在哪边,切线也在哪边)圆心与偏置圆切点的连线即力的方向压力角α:从动件力的方向与速度方向的夹角即为压力角α。
①传动比i 恒定不变②直齿圆柱齿轮10.齿轮机构的特点和类型 ③斜齿圆柱齿轮④直齿圆锥齿轮11. 齿轮啮合基本定律:i=n 1/n 2=w 1/w 212. 渐开线齿廓:i=n1/n2=w1/w2=d2‘/d1’=db2/db113. 渐开线标准齿廓的基本尺寸:d=mz中心距:a=221d d +=2)(1z z m +基圆d b =dcos α(α=20°)V=ωr齿距P=齿厚S+曹宽E 齿高h=齿根高h a +齿顶高h f①m n1=m n2=m n14.齿轮正确啮合条件 ②αn1=αn2=αn③β1= -β2①定轴轮系(每个齿轮上的轴线都固定)14. 轮系的类型 ②周转轮系(有一个齿轮上的轴线不固定)③混合轮系(两种都有)15. 轮系计算公式:定轴轮系: i 1k = K 1N N =主动轮连乘积从动轮连乘积±周转轮系:h k h h k n n n n i --=11=主动轮连乘积从动轮连乘积 (注:方向需要判定)16. 回转件平衡的目的:整回转件的质量分布,使回转件工作时离心力达到平衡,以消除附 加动压力,尽可能减轻有害的机械振动。
1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD J π)(1078.0264s cm kgf L D ⋅⋅⨯- M-圆柱体质量(kg); D-圆柱体直径(cm); L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:2i Js J =(kgf·c m·s 2) J s –丝杠转动惯量(kgf·c m·s 2); i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量gw22⎪⎭⎫ ⎝⎛⋅=n v J π g w2s 2⎪⎭⎫ ⎝⎛=π (kgf·c m·s 2)v -工作台移动速度(cm/min);n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J iJ J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2); J s -丝杠转动惯量(kgf ·cm ·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J(kgf ·c m·s 2)R-齿轮分度圆半径(cm);w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·c m·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)。
机械设计跨度计算公式
机械设计中,跨度是指两个支撑点之间的距离。
在设计机器或设备时,需要确定跨度以确定杆件尺寸和材料,以确保机器或设备的稳定性和安全性。
以下是机械设计跨度计算公式。
1. 悬臂梁跨度计算公式
悬臂梁指只有一个支撑点的梁。
其跨度计算公式为:
L = (W × L^3) / (3 × E × I)
其中,L为梁的跨度,W为悬挂在梁上的负载,E为材料的弹性
模量,I为梁的截面惯性矩。
2. 简支梁跨度计算公式
简支梁指有两个支撑点的梁。
其跨度计算公式为:
L = (W × L^4) / (8 × E × I)
其中,L为梁的跨度,W为悬挂在梁上的负载,E为材料的弹性
模量,I为梁的截面惯性矩。
3. 梁的自由端挠度计算公式
梁的自由端挠度是指梁的一端受力后的弯曲程度。
其计算公式为:δ = (F × L^3) / (3 × E × I)
其中,δ为梁的自由端挠度,F为受力,L为梁的长度,E为材
料的弹性模量,I为梁的截面惯性矩。
以上是机械设计跨度计算公式。
在实际应用中,需要根据具体情况选择适当的公式和参数,以确保机器或设备的安全性和稳定性。
- 1 -。