自动控制理论_08一、二阶系统的与计算.详解
- 格式:ppt
- 大小:1.35 MB
- 文档页数:37

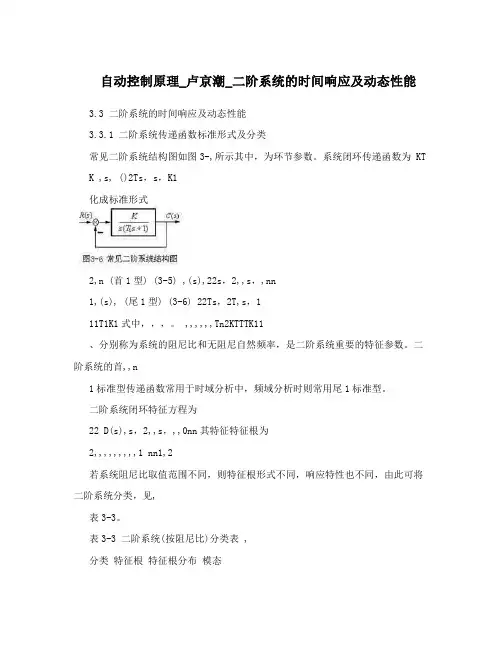
自动控制原理_卢京潮_二阶系统的时间响应及动态性能3.3 二阶系统的时间响应及动态性能3.3.1 二阶系统传递函数标准形式及分类常见二阶系统结构图如图3-,所示其中,为环节参数。
系统闭环传递函数为 KT K ,s, ()2Ts,s,K1化成标准形式2,n (首1型) (3-5) ,(s),22s,2,,s,,nn1,(s), (尾1型) (3-6) 22Ts,2T,s,111T1K1式中,,,。
,,,,,,Tn2KTTTK11、分别称为系统的阻尼比和无阻尼自然频率,是二阶系统重要的特征参数。
二阶系统的首,,n1标准型传递函数常用于时域分析中,频域分析时则常用尾1标准型。
二阶系统闭环特征方程为22 D(s),s,2,,s,,,0nn其特征特征根为2,,,,,,,,,1 nn1,2若系统阻尼比取值范围不同,则特征根形式不同,响应特性也不同,由此可将二阶系统分类,见,表3-3。
表3-3 二阶系统(按阻尼比)分类表 ,分类特征根特征根分布模态,t1e ,,12,,,,,,,,,1 nn 1,2,t2e过阻尼,,tn ,,1e,,,, 1,2n,,tnte临界阻尼,,t,2n,,esin1,t0,,,1 n2,,,,,,j,1,, nn1,2t,,,2necos1,,,t欠阻尼 n57,sint ,,0n ,,,j, 1,2ncos,tn零阻尼数学上,线性微分方程的解由特解和齐次微分方程的通解组成。
通解由微分方程的特征根决定,,t,t,tn12代表自由响应运动。
如果微分方程的特征根是,,且无重根,则把函数,,eee,,,?,?,12n称为该微分方程所描述运动的模态,也叫振型。
,t2,t,如果特征根中有多重根,则模态是具有,形式的函数。
tete,?(,,j,)t(,,j,)t如果特征根中有共轭复根,则其共轭复模态与可写成实函数模态ee,,,,j,,t,t与。
esin,tecos,t每一种模态可以看成是线性系统自由响应最基本的运动形态,线性系统自由响应则是其相应模态的线性组合。

自控原理二阶系统自控原理是控制工程的基础知识之一,其中的二阶系统更是控制工程中的重要组成部分。
二阶系统通常由两个一阶系统级联或串联而成,具有比一阶系统更高的动态性能和控制精度。
在现实生活中,我们常常可以遇到二阶系统的例子。
比如,我们乘坐的汽车通常都是由发动机和传动系统来控制车辆的速度和行驶方向,这就是一个典型的二阶系统。
在这个系统中,发动机和传动系统分别起到加速和减速的作用,通过调节二者之间的协调关系来实现对汽车行驶状态的控制。
二阶系统的特点之一是具有振荡性。
在控制工程中,我们常常会遇到振荡现象,就好比一个摆动的钟摆。
这种振荡现象往往会对系统的稳定性产生负面影响,因此在设计二阶系统时需要注意对振荡进行控制。
控制二阶系统的一种常用方法是PID控制器,即比例-积分-微分控制器。
PID控制器通过对系统进行反馈调节,根据系统输出与期望输出之间的差异进行比例、积分和微分运算,从而实现对系统的精确调节和控制。
除了PID控制器,还有许多其他的控制方法可以应用于二阶系统。
例如,模糊控制和神经网络控制等,这些方法能够通过建立适当的数学模型来实现对二阶系统的控制。
在实际应用中,二阶系统广泛应用于各个领域,如航空航天、工业自动化、医疗仪器等等。
在飞行器中,二阶系统可以用来控制飞机的姿态和高度;在工业领域中,二阶系统可以用于控制机器人的运动和精确定位;在医疗仪器中,二阶系统可以用来控制心脏起搏器的工作频率和波形等。
总之,二阶系统作为自控原理中的重要组成部分,具备振荡性和动态性能较高的特点。
通过合理设计和选择控制方法,我们可以对二阶系统进行精确的调节和控制,从而实现对系统的稳定性和性能的优化。
在实际应用中,我们可以根据具体情况选择适当的控制方法,以满足系统的要求,提高生产效率和工作质量。

二阶系统参数计算二阶系统参数计算是控制系统设计和分析中非常重要的一部分。
二阶系统是指具有两个自由度的系统,通常用于描述振动、滤波等多种现象。
在控制系统中,我们常常需要计算二阶系统的参数,以便进行系统性能评估和控制器设计。
二阶系统的参数主要包括阻尼比、固有频率和系统增益。
阻尼比描述了系统的阻尼性质,固有频率表示了系统的固有振动频率,系统增益则反映了系统的放大倍数。
我们来讨论阻尼比的计算。
阻尼比可以通过系统的阻尼系数和临界阻尼比来计算。
阻尼系数可以通过系统的阻尼比和固有频率来计算,公式为:阻尼系数 = 2 * 阻尼比 * 固有频率临界阻尼比是指系统在阻尼比等于1时的阻尼比,可以通过阻尼系数和固有频率来计算,公式为:临界阻尼比 = 阻尼系数 / (2 * 固有频率)我们来计算固有频率。
固有频率可以通过系统的质量和刚度来计算,公式为:固有频率 = sqrt(刚度 / 质量)其中,质量是指系统的质量,刚度是指系统的刚度。
固有频率是系统在没有任何外界干扰时的振动频率。
我们来计算系统增益。
系统增益可以通过系统的输出和输入之间的关系来计算。
在频域中,系统增益可以通过系统的传递函数来计算。
传递函数是指系统的输出和输入之间的比值,通常用一个复数来表示。
在时域中,系统增益可以通过系统的冲击响应或阶跃响应来计算。
冲击响应是指系统对一个冲击输入的响应,阶跃响应是指系统对一个阶跃输入的响应。
通过计算阻尼比、固有频率和系统增益,我们可以对二阶系统的性能进行评估和控制器设计。
阻尼比决定了系统的响应速度和稳定性,固有频率决定了系统的振动频率,系统增益决定了系统的放大倍数。
在进行二阶系统参数计算时,我们需要准确地知道系统的物理特性和输入输出关系。
同时,我们还需要考虑系统的非线性和时变性对参数计算的影响。
总结起来,二阶系统参数计算是控制系统设计和分析中的重要内容。
通过计算阻尼比、固有频率和系统增益,我们可以对系统的性能进行评估和控制器设计。
.实验二二阶系统的动态过程分析一、实验目的1.掌握二阶控制系统的电路模拟方法及其动态性能指标的测试技术。
2.定量分析二阶系统的阻尼比和无阻尼自然频率n对系统动态性能的影响。
3.加深理解“线性系统的稳定性只与其结构和参数有关,而与外作用无关”的性质。
4. 了解和学习二阶控制系统及其阶跃响应的Matlab 仿真和 Simulink 实现方法。
二、实验内容1.分析典型二阶系统 G(s) 的和n变化时,对系统的阶跃响应的影响。
2.用实验的方法求解以下问题:设控制系统结构图如图 2.1 所示,若要求系统具有性能:p% 20%, t p1s,试确定系统参数K 和,并计算单位阶跃响应的特征量t d, t r和 t s。
图 2.1 控制系统的结构图3.用实验的方法求解以下问题:设控制系统结构图如图 2.2 所示。
图中,输入信号r (t)t ,放大器增益 K A 分别取 13.5,200 和 1500。
试分别写出系统的误差响应表达式,并估算其性能指标。
.图 2.2 控制系统的结构图三、实验原理任何一个给定的线性控制系统,都可以分解为若干个典型环节的组合。
将每个典型环节的模拟电路按系统的方块图连接起来,就得到控制系统的模拟电路图。
2通常,二阶控制系统 G(s) n 2 可以分解为一个比例环节、一个22 ns n惯性环节和一个积分环节,其结构原理如图 2.3 所示,对应的模拟电路图如图 2.4 所示。
图 2.3 二阶系统的结构原理图图 2.4 二阶系统的模拟电路原理图图 2.4 中:u(t )r (t), u (t)c(t) 。
比例常数(增益系数)K R2 ,惯性时间常数 T1 R3C1,积分时间常数R1T2R4C2。
其闭环传递函数为:U c (s)KK TT21 (0.1)U r (s) T2 s(T1s 1) K 21s s KT1 TT1 2又:二阶控制系统的特性由两个参数来描述,即系统的阻尼比和无阻尼自然频率 n 。
自动控制原理二阶系统自动控制原理里的二阶系统,嘿,听起来就很复杂,但其实它就像生活中的很多事情,平平淡淡中藏着小秘密。
想象一下,咱们的生活就像一辆汽车,二阶系统就像是车子的加速和刹车。
当你踩下油门,车子就嗖一下冲出去,心里那个美呀,风驰电掣,感觉自己像个飞车党!但别忘了,车子也有刹车,控制得好,才能稳稳当当,不至于飞出老远。
二阶系统就是用来描述这种加速和减速的。
二阶系统最重要的特点是它有两个主要参数,咱们叫它“自然频率”和“阻尼比”。
自然频率就像是你心中的节奏,有些人喜欢快,有些人喜欢慢。
而阻尼比就好比你的刹车系统,刹得稳不稳,能不能让你不那么剧烈地停下来。
如果阻尼比高,车子就能很快地减速,咱们都知道“稳如老狗”的感觉;如果阻尼比低,那简直就像是开着个不太靠谱的碰碰车,可能会东倒西歪,危险得很。
咱们日常生活中,二阶系统随处可见。
比如,想想你家里的洗衣机,开机后,洗衣机的转速就是一个二阶系统。
刚开始的时候,洗衣机的转速慢慢加快,水流像在跳舞,转得越来越快,真是热闹非凡。
然后,快到一定程度,它会开始减速,直到停下来,这个过程就像是人生的起伏,有高兴也有低谷,给你带来各种各样的体验。
在控制理论里,二阶系统的响应有个经典的表现,那就是“超调”。
想象一下,你准备跳舞,兴奋得有点过头了,结果一跳就多跳了一下,这就是超调。
超调在二阶系统中也挺常见的,过了头就意味着你可能会有点晕,这可不好。
设计控制系统时,咱们总是想方设法减少这种超调,毕竟谁都不想在舞台上跳个不停,直到累得不行才停下来。
如果说二阶系统是一部乐队,那每个参数就是乐器。
自然频率是节拍,阻尼比是和声。
如果节拍不稳,乐器就会变得杂乱无章,整个乐队的表演就会出现问题。
可是如果和声太强,音乐听起来就像在喊口号,完全失去了乐趣。
所以,找到那种“恰到好处”的感觉,才是二阶系统的最终追求。
在实际应用中,咱们常常需要调整这些参数。
比如,调节油门和刹车的力度,就能让你的车子在行驶中稳稳当当,而不是忽上忽下。
二阶系统的动态过程分析二阶系统是指具有两个自由度的动态系统,常见的有二阶低通滤波器、二阶惯性系统等。
在工程和控制领域中,对二阶系统的动态过程进行分析有助于了解系统的响应特性、设计控制器以及优化系统性能。
一、二阶系统的数学模型一般来说,二阶系统可以用以下微分方程来描述:$M(s)Y(s)=S(s)X(s)$其中,$M(s)$表示系统的传递函数,$X(s)$和$Y(s)$分别表示输入和输出信号的拉普拉斯变换,$s$表示复频域变量。
对于线性、时不变的二阶系统,传递函数$M(s)$可以表示为:$M(s) = \frac{K}{(s+a)(s+b)}$其中,$K$表示系统的增益,$a$和$b$分别表示系统的两个极点。
极点的位置和系统的动态响应有密切关系。
二、二阶系统的零极点分布1.两个实根:当两个极点都为实数时,系统响应会表现出一种振荡的特点。
极点的距离越小,振荡的频率越高,振荡的衰减速度越快。
2.两个共轭复根:当极点为共轭复根时,系统响应不会出现振荡,而是呈现一种渐进衰减的特性。
共轭复根的实部决定了响应的衰减速度,虚部决定了振荡的频率。
3.一个实根和一个共轭复根:这种情况下,系统的响应既会出现振荡,又会呈现渐进衰减的特点。
实根决定了振荡的频率,共轭复根的实部决定了衰减速度,虚部决定了振荡的频率。
三、二阶系统的动态响应1.响应时间:表示系统从0到达稳定状态所需要的时间。
可通过单位阶跃响应来测量。
2.超调量:表示响应曲线最大值与稳定值之间的差值。
对于二阶系统,根据极点位置不同,超调量有不同的计算方式。
3.峰值时间:指的是响应曲线达到超调量的最大值所需要的时间。
四、二阶系统的稳定性分析对于二阶系统而言,稳定性的判断可以通过极点的位置来进行。
当且仅当所有的极点实部都小于零时,系统才是稳定的。
针对具体的二阶系统,可以通过极点的特征方程来进行分析。
如果特征方程有两个负实数根,系统就是稳定的;如果有一个或两个正实数根,系统就是不稳定的。