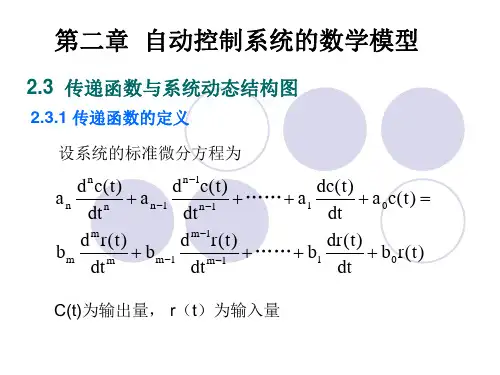
第二章2-3系统方框图梅森公式及系统传递函数
- 格式:ppt
- 大小:2.73 MB
- 文档页数:120
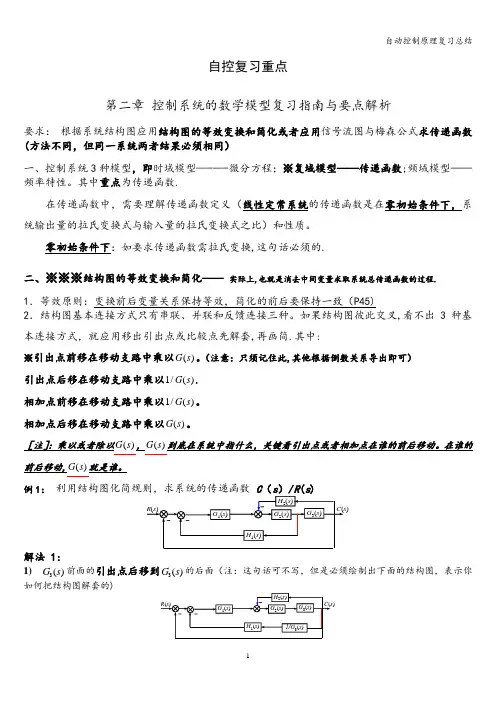
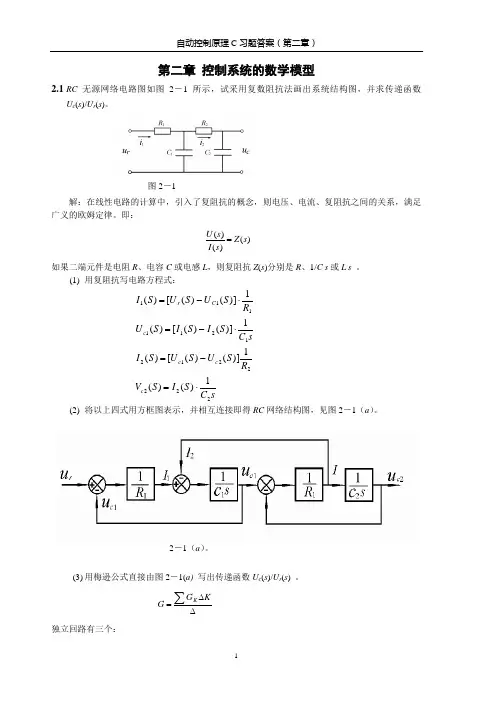
自控复习重点第二章 控制系统的数学模型复习指南与要点解析要求: 根据系统结构图应用结构图的等效变换和简化或者应用信号流图与梅森公式求传递函数(方法不同,但同一系统两者结果必须相同)一、控制系统3种模型,即时域模型—-—-微分方程;※复域模型——传递函数;频域模型——频率特性。
其中重点为传递函数.在传递函数中,需要理解传递函数定义(线性定常系统的传递函数是在零初始条件下,系统输出量的拉氏变换式与输入量的拉氏变换式之比)和性质。
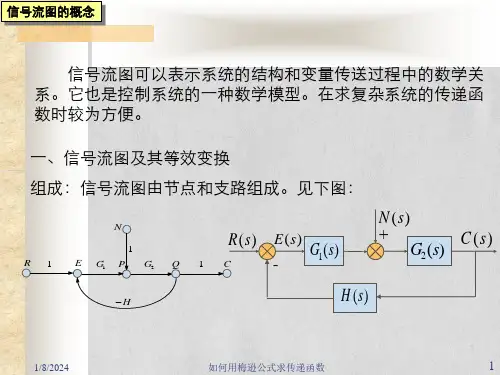
零初始条件下:如要求传递函数需拉氏变换,这句话必须的.二、※※※结构图的等效变换和简化-—- 实际上,也就是消去中间变量求取系统总传递函数的过程.1.等效原则:变换前后变量关系保持等效,简化的前后要保持一致(P45)2.结构图基本连接方式只有串联、并联和反馈连接三种。
如果结构图彼此交叉,看不出3种基本连接方式,就应用移出引出点或比较点先解套,再画简.其中:※引出点前移在移动支路中乘以()G s 。
(注意:只须记住此,其他根据倒数关系导出即可)引出点后移在移动支路中乘以1/()G s . 相加点前移在移动支路中乘以1/()G s 。
相加点后移在移动支路中乘以()G s 。
[注]:乘以或者除以()G s ,()G s 到底在系统中指什么,关键看引出点或者相加点在谁的前后移动。
在谁的前后移动,()G s 就是谁。
例1:)解法 1:1) 3()G s 前面的引出点后移到3()Gs 的后面(注:这句话可不写,但是必须绘制出下面的结构图,表示你如何把结构图解套的))2) 消除反馈连接)3) 消除反馈连接4) 得出传递函数123121232123()()()()()1()()()()()()()()()G s G s G s C s R s G s G s H s G s G s H s G s G s G s =+++ [注]:可以不写你是怎么做的,但是相应的解套的那步结构图必须绘制出来。
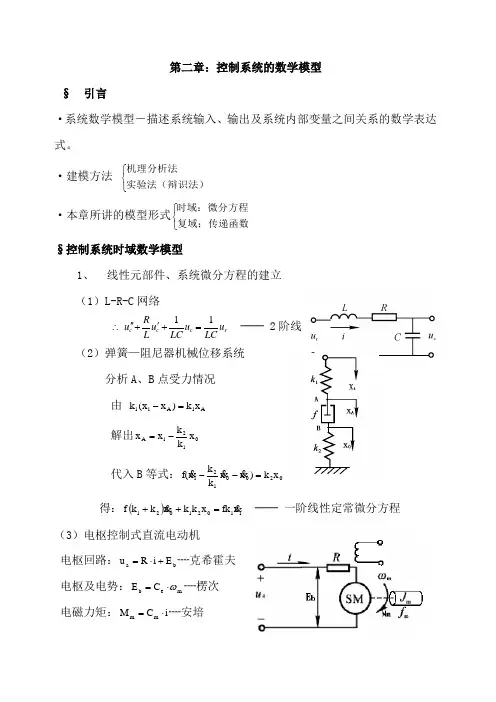
第二章:控制系统的数学模型§ 引言·系统数学模型-描述系统输入、输出及系统内部变量之间关系的数学表达式。
·建模方法⎩⎨⎧实验法(辩识法)机理分析法·本章所讲的模型形式⎩⎨⎧复域:传递函数时域:微分方程§控制系统时域数学模型1、 线性元部件、系统微分方程的建立 (1)L-R-C 网络11cc c r Ru u u u LLC LC'''∴++= ── 2阶线性定常微分方程 (2)弹簧—阻尼器机械位移系统 分析A 、B 点受力情况 由 A 1A i 1x k )x x (k =- 解出012i A x k k x x -= 代入B 等式:020012i x k )x x k k x f(=--&&& 得:()i 1021021x fk x k k x k k f &&=++ ── 一阶线性定常微分方程(3)电枢控制式直流电动机 电枢回路:b a E i R u +⋅=┈克希霍夫 电枢及电势:m e b C E ω⋅=┈楞次 电磁力矩:i C M m m ⋅=┈安培力矩方程:m m m m m M f J =+⋅ωω& ┈牛顿变量关系:m mb a M E i u ω----消去中间变量有:(4)X-Y 记录仪(不加内电路)消去中间变量得:a m 321m 4321m u k k k k k k k k k T =++l l l &&&─二阶线性定常微分方程即:a mm 321m m 4321m u T k k k k l T k k k k k l T 1l =++&&&2、 线性系统特性──满足齐次性、可加性 ● 线性系统便于分析研究。
● 在实际工程问题中,应尽量将问题化到线性系统范围内研究。
● 非线性元部件微分方程的线性化。
例:某元件输入输出关系如下,导出在工作点0α处的线性化增量方程解:在0αα=处线性化展开,只取线性项: 令 ()()0y -y y αα=∆ 得 αα∆⋅-=∆00sin E y 3、 用拉氏变换解微分方程 a u l l l 222=++&&& (初条件为0)复习拉普拉斯变换的有关内容1 复数有关概念 (1)复数、复函数 复数 ωσj s += 复函数 ()y x jF F s F += 例:()ωσj 22s s F ++=+= (2)复数模、相角 (3)复数的共轭(4)解析:若F(s)在s 点的各阶导数都存在,称F(s)在s 点解析。