锁相技术往届部分考试题目(做)
- 格式:doc
- 大小:163.00 KB
- 文档页数:4

锁相技术期末试题及答案一、选择题1. 锁相技术是一种用于_______________信号的相位信息的提取和调整的技术。
A. 基带B. 射频C. 中频D. 高频答案:B2. 锁相环是由_______________组成的反馈控制系统。
A. 比例环节B. 积分环节C. 微分环节D. 以上都是答案:D3. 下列哪个不是锁相技术中常用的几种工作方式?A. 直接数字合成B. 数字频率合成C. 锁相环D. 时钟提取答案:A4. 锁相环的稳定性可以通过哪个参数来衡量?A. 带宽B. 噪声功率密度C. 整定参数D. 共模抑制比答案:D5. 锁相环的谐振频率是指_______________。
A. 输入频率B. 反馈频率C. 比较器输出频率D. 控制电压频率答案:B二、填空题1. 锁相环在频率合成中常用的工作方式是_______________。
答案:数字频率合成2. 锁相环输出信号的频率可以通过_______________进行调节。
答案:控制电压3. 锁相环的环路滤波器主要用于补偿_______________。
答案:相位误差4. 锁相环在通信系统中常用于_______________信号的产生和检测。
答案:调制5. 锁相环的作用是_______________信号的相位。
答案:提取和调整三、问答题1. 请简要介绍锁相技术的基本原理。
锁相技术是一种用于提取和调整信号相位信息的技术。
其基本原理是通过比较输入信号和参考信号的相位差异,并利用反馈控制系统自动调节输出信号的相位,使其与参考信号同步。
锁相技术主要通过锁相环实现,锁相环是由比例环节、积分环节和微分环节等组成的反馈控制系统,通过调节控制电压和环路滤波器来实现对输出信号相位的精确定位和调整。
2. 锁相环的稳定性如何衡量?锁相环的稳定性主要通过共模抑制比来衡量。
共模抑制比是指在输入信号存在拍频或噪声的情况下,锁相环输出信号与参考信号之间的相位差的稳定性。
共模抑制比越高,表示锁相环输出信号的相位稳定性越好。

锁相技术(往届部分题目)一、选择题1、为了加大环路的捕获带,应______环路增益或______环路带宽,但提高环路的跟踪性能的要求与之___。
A 、提高、增加、相反B 、提高、增加、相同C 、降低、增加、相反D 、提高、减小、相反2、在二阶锁相环中,在环路滤波器与VCO 之间插入一直流放大器,放大倍数为10,直流放大器使环路参数n ω____,H ω____,p ω______。
A 、减少、增加、增加B 、增加、增加、增加C 、增加、增加、减少D 、减少、减少、增加3、环路对内部VCO 的噪声呈现____-滤波器作用,对外部输入的噪声呈现____-滤波器作用。
A 、带通、低通B 、低通、带通C 、高通、低通D 、低通、高通4、环路的捕获带、同步带和快捕带的关系是:_____A 、H ω>p ω>L ωB 、p ω>L ω>H ωC 、L ω>H ω>p ωD 、p ω>H ω>L ω5、环路锁定时,瞬时频差_____,固有频差______控制频差,相差为_____,控制电压为___.A 、很小的量、等于、0、常数B 、0、大于、很小的量、变量C 、0、小于、很小的量、变量D 、0、等于、很小的量、常数6、相位噪声的时域噪声表示_____,频域表示______,它们的关系是____.A 、方差、功率、拉氏变换B 、功率、方差、傅氏变换C 、方差、功率谱密度、傅氏变换D 、方差、功率谱密度、Z 变换7、在一阶环中,下列哪种情况环路能锁定_______。
A 、环路增益小于固有频差B 、环路增益大于固有频差C、环路增益等于固有频差D、环路增益小于固有频差8、锁相环稳定的条件是:________。
A、理想情况下相位余量为0°,实际情况相位余量60°B、理想情况下相位余量小于0°,实际情况相位余量0°C、理想情况下相位余量为60°,实际情况相位余量0°D、理想情况下相位余量为180°,实际情况相位余量-60°9、当环路的相位裕度接近于0°,在滤波器中增加______来改善环路的稳定性。
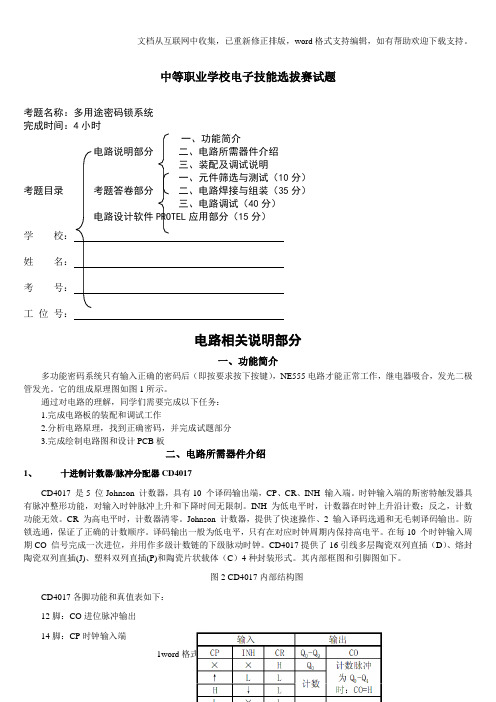
中等职业学校电子技能选拔赛试题考题名称:多用途密码锁系统完成时间:4小时一、功能简介电路说明部分二、电路所需器件介绍三、装配及调试说明一、元件筛选与测试(10分)考题目录考题答卷部分二、电路焊接与组装(35分)三、电路调试(40分)电路设计软件PROTEL应用部分(15分)学校:姓名:考号:工位号:电路相关说明部分一、功能简介多功能密码系统只有输入正确的密码后(即按要求按下按键),NE555电路才能正常工作,继电器吸合,发光二极管发光。
它的组成原理图如图1所示。
通过对电路的理解,同学们需要完成以下任务:1.完成电路板的装配和调试工作2.分析电路原理,找到正确密码,并完成试题部分3.完成绘制电路图和设计PCB板二、电路所需器件介绍1、十进制计数器/脉冲分配器CD4017CD4017 是5 位Johnson 计数器,具有10 个译码输出端,CP、CR、INH 输入端。
时钟输入端的斯密特触发器具有脉冲整形功能,对输入时钟脉冲上升和下降时间无限制。
INH 为低电平时,计数器在时钟上升沿计数;反之,计数功能无效。
CR 为高电平时,计数器清零。
Johnson 计数器,提供了快速操作、2 输入译码选通和无毛刺译码输出。
防锁选通,保证了正确的计数顺序。
译码输出一般为低电平,只有在对应时钟周期内保持高电平。
在每10 个时钟输入周期CO 信号完成一次进位,并用作多级计数链的下级脉动时钟。
CD4017提供了16引线多层陶瓷双列直插(D)、熔封陶瓷双列直插(J)、塑料双列直插(P)和陶瓷片状载体(C)4种封装形式。
其内部框图和引脚图如下。
图2 CD4017内部结构图CD4017各脚功能和真值表如下:12脚:CO进位脉冲输出14脚:CP时钟输入端15脚:CR清除端13脚:INH禁止端1~7、10脚、11脚:Q0-~Q9计数脉冲输出端16脚:VDD正电源8脚:VSS地2. 集成电路LM567LM567是一块锁相环音频译码器,工作频率<500KHZ。

数控技术复习题普通用卷学习方式: 业余时间:无限制考试科目:《数控技术》(总分) 100分一单选题 (共35题,总分值70分 )1. 以下指令中,()是准备功能(2 分)A. M03B. G90C. X25D. S7002. 脉冲当量是指()(2 分)A. 每发一个脉冲信号,机床移动部件的位移量B. 每发一个脉冲信号,伺服电机转过的角度C. 进给速度大小D. 每发一个脉冲信号,相应丝杠产生转角大小3. 数控铣床的G41/G42是对()进行补偿(2 分)A. 刀尖圆弧半径B. 刀具半径C. 刀具长度D. 刀具角度4. 指出下列哪些误差属于系统的稳态误差()(2 分)A. 定位误差B. 跟随误差C. 轮廓误差D. 定位误差和跟随误差5. 在构成CNC机床坐标系的坐标轴中,与机床主轴平行的轴是()。
(2 分)A. X轴B. Y轴C. Z轴D. A轴6. 确定机床坐标系时,一般()(2 分)A. 采用笛卡尔坐标系B. 采用极坐标系C. 用左手判断D. 先确定X、Y轴,再确定Z轴7. 下列CNC指令代码在编程时,不需要指定进给速度F指令的是()。
(2 分)A. G00B. G01C. G02D. G038. 数控机床四轴三联动的含义是()(2 分)A. 四轴中只有三个轴可以运动B. 有四个控制轴、其中任意三个轴可以联动C. 数控系统能控制机床四轴运动,其中三个轴能联动9. FMS是指()(2 分)A. 自动化工厂B. 计算机数控系统C. 柔性制造系统D. 数控加工中心10. 伺服系统的分类有多种方法,下面四个答案中,不是按控制方式分类的是()。
(2 分)A. 主轴伺服系统B. 开环伺服系统C. 半闭环伺服系统D. 闭环伺服系统11. 延时暂停使用()代码标书(2 分)A. M00B. G04C. G4212. 在CNC软件中,通常把软件完成的任务分成管理和控制两大类任务,下面四个子任务中不属于管理类任务的是()。
1-3已知一阶环的,,。
问当输入频率分别为和的载波信号时,环路能否锁定?稳定相差多大?解:一阶环路能否锁定,要看固有频差与环路增益(最大控制频差)的之间的关系。
如果输入频率为1.98MHz,则,显然,环路能够锁定,且稳态相差为:如果输入频率为2.04MHz,则,显然,环路将不能锁定,也就不存在稳定的状态了。
1-4已知一阶环的,,,在输入载波信号作用下环路锁定,控制频差等于。
问输入信号频率为多大?环路控制电压稳态相差?解:根据题目所给参数,可以得到环路增益:,也即环路的最大控制频差;根据环路动态方程:瞬时频差=固有频差–控制频差,且环路锁定时由于瞬时频差为零,因此固有频差等于控制频差,即环路控制电压:稳态相差:1-5对于一阶环,设开环时式中、为常数。
鉴相器相乘系数,VCO控制灵敏度。
问:a)环路能否进入锁定?为什么?b)环路的最大和最小瞬时频差值各为多少?c)画出鉴相器输出波形;d)为使环路进入锁定,在鉴相器和VCO之间加了一级直流放大器,问其放大量必须大于多少?解:a)固有频差:,环路增益:固有频差大于最大控制频差,因此环路不能进入锁定。
b)环路的最大瞬时频差:环路的最小瞬时频差:c)一阶环路不能锁定时,鉴相器的输出波形为非正弦差拍波,波形如下:d)为了使环路进入锁定,放大器的放大量必须能够提供使VCO的控制频差达到固有频差的值。
即2-1下图为锁相环路频率特性测试电路,输入为音频电压,从VCO输入端输出电压,LF采用。
求:a)画出此电路的线性相位模型;b)写出电路的传递函数:c)指出环路为几阶几型,为什么?a)线性相位模型b)闭环传递函数代入得:其中:c)环路的阶和型所以,环路为二阶1型环。
2-4采用有源比例积分滤波器的二阶环,当输入频率斜升信号时,要求环路稳态相差。
问环路参数、应如何选择?2-6设的环路,求输入相位为、和时的稳态相差3-1在深空中用于跟踪飞船的测试设备使用一窄带载波跟踪环路,假定环路使用有源比例积分滤波器,设计环路噪声带宽,和,试确定:1环路阻尼系数与自然谐振频率;2环路增益;3选择电容值,并确定与之值。
《CAD_CAM》一、单选题1、下面几种图形软件标准(C)是数据交换标准。
A GKSB PHIGSC STEPD CGM2、数控手工编程中最常用的控制介质是(B)A磁带B八单位穿孔纸带C磁盘D胶片3、近一、二十年,机械工业取得巨大进步的特点是采用了(D)A劳动密集型生产力B流水生产线C大量生产力D电子技术及其控制技术4、在库存管理中,ABC分类法一般是以(B)A产品生命周期为基础B库存价值为基础C订货提前期为基础D库存品种为基础5、以下不属于输出设备的是(A)A操纵杆B打印机C绘图机D显示器6、CIMS的核心技术是(A)A CAD/CAM集成B CADC CAMD CAPP7、在CAPP系统中,确定切削用量的方法采用的是(D)A优化计算B使用机械加工手册确定C人工给定D除人工给定外,还可以通过优化计算获得8、数据元素之间存储顺序与逻辑顺序一致的数据结构为(A)A线性表B树C二叉树D图9、加工过程优化计算中,可控变量有(C)A刀具材料B切削力C切削速度D切削温度10、当市场需求是按计划供应时,制订零件的工艺过程应采用的标准是(B) A最大生产率标准B最大利润标准C最小生产时间标准D加工路线最短标准11、在数控机床CNC系统组成中,核心部分为(B)A输入输出设备 BPLC CCNC装置D伺服机构12、(A)是计算机图形学领域中最早用来表示形体的模型,至今仍在广泛应用。
A线框B表面C实体D曲面13、栈的插入与删除操作在(A)进行。
A栈顶B栈底C任意位置D指定位置14、用有限元法求解问题时,决定单元信息数据量的因素之一是(A)A单元的数目B单元的编号C单元的重量D单元的位置15、被称为新一代建模系统的是(A)A特征建模B线框建模C表面建模D实体建模16、在二维图形变换矩阵中,参数s可使图形产生(D)变换。
A反射B旋转C错切D全比例17、在数据结构中,从逻辑上可以把数据结构分成(C)A动态结构和静态结构B紧凑结构和非紧凑结构C线性结构和非线性结构D内部结构和外部结构18、在派生式CAPP系统中利用分类编码进行零件分类成组的主要依据(B)A零件的材料B特征矩阵C典型工艺D零件的种类19、工厂下设许多车间,每个车间有若干班组,班组里每个工人的信息又包括许多项目。
锁相技术(往届部分题目)
一、选择题
A 1、为了加大环路的捕获带,应______环路增益或______环路带宽,但提高环路的跟踪性能的要求与之___。
A 、提高、增加、相反
B 、提高、增加、相同
C 、降低、增加、相反
D 、提高、减小、相反
B 2、在二阶锁相环中,在环路滤波器与VCO 之间插入一直流放大器,放大倍数为10,直流放大器使环路参数n ω____,H ω____,p ω______。
A 、减少、增加、增加
B 、增加、增加、增加
C 、增加、增加、减少
D 、减少、减少、增加
C 3、环路对内部VCO 的噪声呈现____-滤波器作用,对外部输入的噪声呈现____-滤波器作用。
A 、带通、低通
B 、低通、带通
C 、高通、低通
D 、低通、高通
A 4、环路的捕获带、同步带和快捕带的关系是:_____
A 、H ω>p ω>L ω
B 、p ω>L ω>H ω
C 、L ω>H ω>p ω
D 、p ω>H ω>L ω
D 5、环路锁定时,瞬时频差_____,固有频差______控制频差,相差为_____,控制电压为___.
A 、很小的量、等于、0、常数
B 、0、大于、很小的量、变量
C 、0、小于、很小的量、变量
D 、0、等于、很小的量、常数
C 6、相位噪声的时域噪声表示_____,频域表示______,它们的关系是____.
A 、方差、功率、拉氏变换
B 、功率、方差、傅氏变换
C 、方差、功率谱密度、傅氏变换
D 、方差、功率谱密度、Z 变换
B 7、在一阶环中,下列哪种情况环路能锁定_______。
A 、环路增益小于固有频差
B 、环路增益大于固有频差
C 、环路增益等于固有频差
D 、环路增益小于固有频差
D 8、锁相环稳定的条件是:________。
A 、理想情况下相位余量为0°,实际情况相位余量60°
B 、理想情况下相位余量小于0°,实际情况相位余量0°
C 、理想情况下相位余量为60°,实际情况相位余量0°
D 、理想情况下相位余量为180°,实际情况相位余量30-60°
A 9、当环路的相位裕度接近于0°,在滤波器中增加______来改善环路的稳定性。
A 、一个零点
B 、一个基点
C 、两个零点
D 、两个极点
D 10、同阶环路的跟踪性能_______。
A 、仅取决于环路的型数
B 、仅取决于环路的增益
C 、取决于环路的型数和增益,与环路的其它参数无关
D 、取决于环路的型数和增益,与环路的其它参数有关
A 11、对于相位阶跃,所有PLL 都____。
A 、可锁定
B 、不能锁定
C 、二阶环可锁定,一阶环不能锁定
D 、一阶环可锁定,二阶环不能锁定
二|、判断题
1、环路锁定时,相图上有两种平衡点,他们都是环路的锁定点。
×只有一个是的,另一个为不稳定平衡点
2、一阶锁相环、RC 积分滤波器二阶锁相环和无源比例滤波器二阶锁相环的同步带等于环路增益K ,而理想滤波器的同步带为∞。
√
3、环路的阶数是由极点决定的,环路的型数是由零点决定的。
×型由开环传输函数原点处极点的个数决定
4、环路噪声带宽L B 反映了环路对VCO 噪声的抑制能力。
× 反映对输入噪声的抑制能力
5、环路信噪比L ρ反映了环路对输入噪声的抑制能力。
√
6、PLL 为了获得最佳抑制噪声的能力,n ω越小越好。
× 输入噪声和压控振荡器噪声功率谱密度线的交点附近最佳。
7、同样的输入信号,不同环路,其稳态相差不同。
√ P39讨论二第一句话
8、对于同一种环路来说,输入信号变化越快,跟踪性能就越差。
√
9、环路可以跟踪输入相位的低频成分而不能跟踪其高频成分。
× 载波跟踪就是跟踪高频,跟踪的频率大多都是高频的的吧
10、对于频率阶跃二阶PLL 都可锁定,一阶PLL 都不能锁定。
×
11、跳周所引起的失锁与环路门限噪声低所引起的失锁的性质不同。
√
12、环路带宽BW ω反映了环路对输入噪声的抑制能力。
√
13、对于相位阶跃所有的PLL 都可锁定。
√
14、对于频率斜升所有的PLL 都不能锁定。
×
15、对于频率阶跃所有的PLL 都可锁定,一阶PLL 都不能锁定。
和第10题应该是一样的吧
16、当环路的相位裕度接近于0时,在滤波器中增加一个相位超前因子来改善环路的稳定性。
√ 对应选择题第9题
17、快捕带是指速度很快的捕获带。
×
18、同步带是指环路能够保持锁定的范围。
×同步范围=2×同步带
三、填空题
1、PLL 有___鉴相器___、__环路滤波器______、___压控振荡器_______组成。
2、辅助捕获的方法有__人工电调_____、__自动扫描_____、___辅助鉴频_____、__变带宽_______、___变增益______。
3、PLL 的两种工作状态为__捕获______和__锁定______,二阶PLL 的捕获全过程包括:_频率捕获________和__相位捕获________,一阶PLL 的捕获过程只有_相位捕获___。
4、二阶PLL 系统锁定状态下的闭环传输函数为_s
s KF s KF s H +=)()()(_____,误差传输函数为_s
s KF s s H e +=)()(____,它们对应的频率响应分别为
Ω+ΩΩ=
Ωj j KF j KF j H )()()(______,_____Ω
+ΩΩ=Ωj j KF j j H e )()(__,同时所表现的滤波特性分别为__低通____,_高通_____。
5、锁相环路动态方程的一般式:__)(sin )()()(1t p KF t p t p e e θθθ-=_________。
6、PLL 在频率捕获阶段,鉴相器输出_差拍电压_______,通过环路滤波器的积分作用,产生__直流____分量,牵引VCO 的输出频率向输入信号的频率靠拢,使频差减小到进入__快捕带L ω∆_____时,频率捕获过程即告结束,进入_相位捕获________,相差不再超越___π2_____,最终趋于一个很小稳态值。
7、一高增益二阶环,环路增益K=2*5
10rad/s ,自然振荡频率n ω=200rad/s ,ξ=,输
入信号频率s P =-1310mW ,单边噪声功率谱密度0N =*-2110W/Hz ,求L B =_自己算。
=+)41(82ξξωn ____________,L S/N )(=__。
=L
s B N 0P _________,环路相位方差方差和输出噪声相位方差为____。
)(=L
S/N 1____________。
四、分析与计算题
1、试画出RC 积分滤波器、无源比例积分器和有源比例积分器电路图,并导出传输函数。
2、画出多个噪声源的环路线性相位模型。
3、无源比例二阶环,其参量为:ξ=2/2,n ω=100rad/s ,K=2*510ras/s ,0f ∆=600HZ
计算h ω∆,L ω∆,Lmax T ,P ω∆。
和p T 。
4、设一RC 积分滤波器二阶环,环路增益为K=5
10rad/s ,RC 滤波器常数τ=10s ,求环路的相位余量,并判断环路是否稳定。
5、同步带、捕获带、快捕带具体含义是什么
6、理想二阶环,d K =10V/rad ,0K =10kH/V ,1τ=,2τ=,求环路相位余量,并判断是否稳定。
7、锁相环的应用。