机电一体化实验1、2、3指导书
- 格式:doc
- 大小:690.50 KB
- 文档页数:19
机电一体化课程设计指导书一、课程目标知识目标:1. 理解并掌握机电一体化基本原理,包括机械系统、电子系统、控制系统及信息处理系统的基本构成及相互关系。
2. 学习并掌握常用传感器的工作原理及其在机电一体化系统中的应用。
3. 掌握机电一体化系统的设计方法和步骤,能够运用相关知识进行简单的系统设计。
技能目标:1. 能够运用CAD软件进行简单的机械结构设计,并完成图纸绘制。
2. 能够运用编程软件对控制系统进行编程,实现对机电系统的基本控制。
3. 能够运用相关工具和仪器进行机电一体化系统的调试和故障排除。
情感态度价值观目标:1. 培养学生热爱科学、探索未知的精神,提高对机电一体化技术的兴趣和认识。
2. 培养学生的团队协作意识和沟通能力,使他们在项目实践中能够主动承担责任,共同解决问题。
3. 培养学生具备安全意识、环保意识和质量意识,使其在设计过程中充分考虑这些因素,养成良好的职业素养。
分析课程性质、学生特点和教学要求,本课程旨在帮助学生在掌握基本理论知识的基础上,提高实践操作能力。
课程目标具体、可衡量,有助于学生和教师明确课程预期成果,为后续的教学设计和评估提供依据。
在教学过程中,注重理论联系实际,激发学生的创新思维,培养具备实际操作能力的机电一体化技术人才。
二、教学内容根据课程目标,教学内容分为以下三个部分:1. 理论知识学习:- 机电一体化基本原理:讲解机械系统、电子系统、控制系统及信息处理系统的基本构成及相互关系,涉及课本第一章内容。
- 常用传感器:介绍各种传感器的工作原理及其在机电一体化系统中的应用,对应课本第二章。
- 系统设计方法:学习机电一体化系统的设计方法和步骤,包括需求分析、方案设计、详细设计等,参考课本第三章。
2. 实践操作:- 机械结构设计:运用CAD软件进行简单机械结构设计,绘制图纸,结合课本第四章内容。
- 控制系统编程:使用编程软件进行控制系统编程,实现对机电系统的基本控制,涉及课本第五章。

机电⼀体化实验指导书《机电⼀体化技术》实验指导书(第⼀版)杨林初编写王佳主审适⽤专业:机械设计制造及其⾃动化机械电⼦⼯程江苏科技⼤学机械⼯程学院2010年10⽉前⾔为了使学⽣更好地理解和消化理论教学中相关知识点,掌握机电⼀体化技术中机械、电⽓、⽓压、液压等相结合的特点,以及相关的电⼦技术和计算机控制技术等理论,特编写本实验指导书。
该课程共开设两个必修实验,分别是《⼯业机器⼈产品解剖实验》和《机电⼀体化产品解剖实验》课程采⽤国际先进的以⾊列intelitek机械⼿臂为平台,详细介绍该设备的机械结构和电⽓结构,机电结合,演⽰其各个⾃由度的⼯况。
《机电⼀体化产品解剖实验》以斯沃数控维修仿真软件和数控机床实物为平台,以多媒体教学为辅助⼿段,虚拟教学和实物教学相结合,充分剖析数控机床和机械结构和电⽓结构。
本实验指导书的特点是通俗易懂,难度适中。
⽽且本实验采⽤国际和国内先进的智能化程度较⾼的机械⼿臂和数控设备作为实验平台,设备较先进,在实验中了解应⽤这些系统,可使学⽣在诸多⽅⾯获益。
如果学⽣想深⼊学习,本指导书可起到抛砖引⽟的作⽤。
由于本指导书编写时间仓促,编者⽔平有限,错漏难免,请⼴⼤师⽣指正,多提宝贵意见。
⽬录实验⼀:⼯业机器⼈产品解剖实验 (1)实验⼆:机电⼀体化产品解剖实验 (7)实验⼀:⼯业机器⼈产品解剖实验实验学时:2实验类型:演⽰实验要求:必修⼀、实验⽬的通过给定的教学机器⼈,使学⽣认识和了解⼯业机器⼈(机械⼿臂)的基本结构和组成。
初步掌握对机械⼿的编程和控制⽅法。
⼆、实验内容1.认识⼯业机器⼈的结构特点。
2.认识⼯业机器⼈的运动特性。
3.了解⼯业机器⼈电⽓控制系统的组成和控制⽅法。
4.学会简单编程,控制⼯业机器⼈完成规定的动作。
三、⼯业机器⼈结构原理SCORBOT-ER 4u是仿效⼯业机器⼈设计和研制开发的。
开放式的机械⼿臂结构让学⽣观察和学习它的内部机械装置。
如图1所⽰。
机械⼿臂各个组成部分如图2所⽰。

实验一、单管放大电路实验报告实验目的:实验此电路是否具有放大作用,以及更深刻的认识放大电路的原理和了解放大电路在生活中的应用实验原理:三极管的放大作用实验步骤:先检测三极管是否具有放大作用,再通过函数信号发生器和示波器以及模拟实验箱、万用电表来进行三极管的放大实验实验仪器:函数信号发生器、示波器、万用电表、模拟实验箱、导线数据记录:三极管是否具有放大作用的实验记录输入 1.8v输出 2.5v放大0.9v结论:三极管具有放大作用。
对放大电路的实验记录输入10mv 15mv 20mv输出200mv 300mv 400mv放大180mv 285mv 380mv结论:此电路具有放大作用。
实验二、基本运算电路实验目的:(1)加深运算放大器两条规则的认识。
(2)掌握运算放大器的使用功能。
实验原理运算放大器(简称运放)是一种包含许多晶体管的集成电路。
作用是把输入电压放大一定倍数后再输送出去,其输出电压与输入电压的比值称为电压放大倍数或电压增益。
是一种高增益、高输入电阻、低输出电阻的放大器。
下图给出了运放电路图形符号。
运放有两个输入端a (倒相输入端或反相输入端)、b (非倒相输入端或同相输入端)和一个输出端O 。
理想运放是指其开环放大倍数A →∞,输入电阻R í→∞,输出电阻R O →0,可以得出以下两条规则:(1)倒相端和非倒相端(反相输入端和同相输入端)的输入电流均为零(虚断I += I -=0)。
(2)对于公共端(地),倒相端和非倒相端(反相输入端和同相输入端)的电压相等(U +=U -)。
实验内容与步骤 1.反相比例运算电路反相比例运算电路如图所示,图 反相比例运算电路输入电压U i 通过电阻R 作用与运放的反相输入端(其中R 2=R 1∥R f )。
根据理想运放的两条规则有U P =U N =0 I P =I N ,所以节点N 的电流方程为1R Un Ui -=Rf UoUn -有U O =—Ui R Rf 1,U O 与U i 成比例关系,比例系数为 —1R Rf,负号表示U O 与U i 反相。

机电一体化系统设计课程实验指导书(可编程控制器原理及工程应用)实验一步进电机控制实验一、实验目的1、掌握步进电机工作原理;2、熟悉对步进电机转向、速度、行程进行控制的方法。
二、实验要求1、通过实验,加深并验证学过的理论知识,掌握实验的基本方法和实验原理;2、正确使用仪器设备;3、认真观察仪器设备的运动方式,独立编写控制程序并进行操作。
4、学生在实验过程中,应学会独立思考,应用所学专业理论知识分析和解决实验中遇到的具体问题;三、实验原理1、步进电机工作原理步进电机按工作原理可分为电磁式、磁阻式、永磁式、混合式四类。
其中混合式步进电机从定子或转子的导磁体来看,它如反应式步进电机,所不同的是它的转子上置有磁钢,反应式转子则无磁钢。
从它的磁路内含有永久磁钢这一点来说,又可以说它是永磁式,但因其结构不同,使其作用原理及性能方面,都与永磁式步进电机有明显区别。
它好像是反应式和永磁式的结合,所以常称为混合式。
混合式步进电机具有驱动电流小,效率高,过载能力强、控制精度高等特点,是目前市面上应用最为广泛的一种步进电机。
左图是两相混合式步进电机的剖面示意图。
定子上有两个等分的磁极,相邻两个磁极间的夹角为90°。
磁极上面装有控制绕组且联成A、B两相,转子上均匀分布两个齿,齿间距为180°。
以A、B表示两相绕组正向电流工作,、表示反向电流工作,可实现:1、两相激励四拍整步运行方式,即AB→B→→A 或单相激励的四拍运行方式,即A→B→ → 。
2、八拍半步运行方式,即AB→B→ B→ →→→A→A。
两相混合式步进电机剖面示意图此外还有1/4步距的运行方式、微步距控制运行方式,这里不一一叙述。
本节以八拍半步运行方式为例,讲述其工作原理,从下图可看出,(a)图为当A、B两相同时正向通电时,转子受到两相转矩的矢量和而转至该位置,(b)图为B相通电瞬间时转子的受力情况,(c)图为A相接反向电流,而B相接正向电流时转子受到两相转矩的矢量和而转到该位置,依此类推,可得出八拍半步运行方式(图中只给出了前三拍运行方式)。
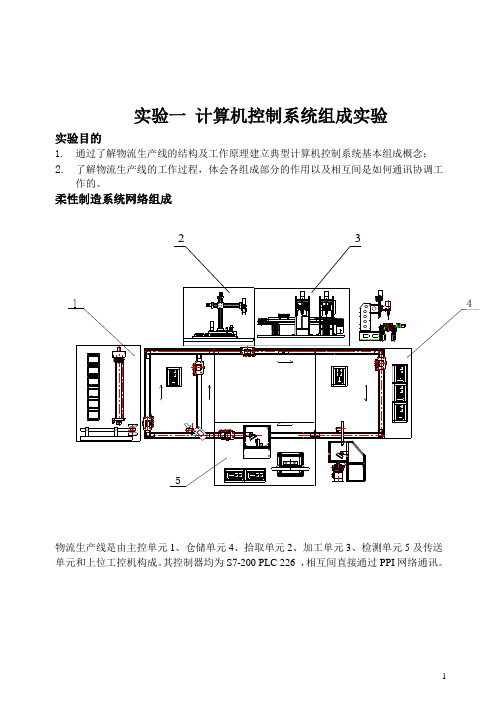
实验一计算机控制系统组成实验
实验目的
1.通过了解物流生产线的结构及工作原理建立典型计算机控制系统基本组成概念;
2.了解物流生产线的工作过程,体会各组成部分的作用以及相互间是如何通讯协调工
作的。
柔性制造系统网络组成
物流生产线是由主控单元1、仓储单元4、拾取单元2、加工单元3、检测单元5及传送单元和上位工控机构成。
其控制器均为S7-200 PLC 226 ,相互间直接通过PPI网络通讯。
PPI网络拓扑图
由主控单元通过PPI总线控制其他从站PLC的工作状态(起停与物料运行情况).具体各从站的控制任务由各从站控制器独立运算与驱动完成。
另主控单元通过EM277和CP5611与上位工控机构成PROFIBUS_DP网络.组态软件
使用组态王.
PROFIBUS网络拓扑图
将上述两种总线合并,系统完整网络拓扑如图
了解分析系统中信息数据流的传输关系。
主控系统负责通过PPI总线控制其他从站
况。
PROFIBUS 总线系统中工控机安装组
态王,作为主站,通过CP5611板卡与各
EM277为从站的下位PLC系统连接,实
现上位人机界面系统与下位控制器连
接。
工作站分析
了解控制功能和程序,分析各
工作站的程序控制框图,详见
系统使用说明书
思考题:
1、试分析该计算机控制系统中各系统构成
2、分析PPI通讯网络中主站作用?
3、试分析主站与从站通讯数据区应如何规划
4、试分析顺序控制法在系统中运用?
5、谈谈仓储单元中显示装置的作用,可能的通讯参数与协议?
6、试分析某一单元的控制功能,并画出流程图。

机电一体化综合实训指导书机械工程系机电教研室编泸州职业技术学院机械工程系2011年7月目录第一章机电一体化组合实训平台产品简介 (3)一、产品图片 (3)二、产品概述....................................................................................... 错误!未定义书签。
三、产品特点 (4)四、技术性能 (4)五、实训工作任务 (4)六、装置基本配置 (6)第二章机电一体化组合实训平台组成、工作原理、控制要求及机构功能 (8)一、系统要求 (8)二、工作流程 (8)三、控制要求 (8)四、上料机构 (9)五、搬运机械手机构 (10)六、皮带输送与分拣机构 (11)第三章机电一体化组合实训平台电气、气动控制及运行操作 (13)一、电气控制电路组成....................................................................... 错误!未定义书签。
二、气动原理及气动回路原理图....................................................... 错误!未定义书签。
三、机电一体化组合实训平台使用说明——西门子 (16)四、机电一体化实训考核装置使用说明——松下 (26)五、机电一体化组合实训平台使用说明——三菱 (36)六、机电一体化组合实训平台使用说明——欧姆龙 (44)附录一:机电一体化组合实训平台机构图和设备总装图 (53)第一章机电一体化组合实训平台简介一、概述本装置是一种最为典型的机电一体化产品,是为职业院校、职业教育培训机构而研制的,适合机电一体化、电气自动化等相关专业的教学和培训。
它在接近工业生产制造现场基础上又针对教学+及实训目的进行了专门设计,强化了机电一体化的安装与调试能力。
本装置由导轨式型材实训台、机电一体化设备部件、电源模块、按钮模块、PLC模块、变频器模块、交流电机模块、步进电机及驱动器模块、模拟生产设备实训单元(包含上料机构、搬运机械手、皮带输送线、物件分拣等)和各种传感器等组成。
实验一计算机控制系统时间响应分析一、实验目的1.培养学生初步的MATLAB编程能力;2.培养学生初步利用MATLAB对离散控制系统进行时域、频域分析的能力。
二、实验原理及方法1.对如下离散控制系统进行单位阶跃响应、单位脉冲响应的仿真:8.06.15.14.32)(22+−+−=ZZZzzG2.用到的控制系统工具箱函数有:dstep( ) 离散时间阶跃响应dbode() 离散波特图dimpulse( ) 离散时间单位脉冲响应dnyquist() 离散Nyquist图3.可参考如下MATLAB语言仿真样例程序进行编程:num=[2 -3.4 1.5];den=[1 -1.6 0.8];%画离散单位阶跃响应曲线[y,x]=dstep(num,den)subplot(2,2,1)plot(y,'.r')gridxlabel('Time/s');ylabel('Amplitude');title('Discrete step response')%画离散单位脉冲响应曲线[y,x]=dimpulse(num,den);subplot(2,2,2)plot(y,'.g')gridxlabel('Time/s');ylabel('Amplitude');title('Discrete impulse response')%画离散系统bode图subplot(2,2,3)1dbode(num,den,0.1);title('Discrete Bode Plot')grid%画离散系统的nyquist图subplot(2,2,4)dnyquist(num,den,0.1)title('Discrete Nyquist Plot')grid4.参考仿真结果曲线如下:0204060-0.500.511.52Time/sAmplitudeDiscrete step response010203040-1012Time/sAmplitudeDiscrete impulse response-20020Magnitude (dB)10-1100101102-90090Phase (deg)-2024-4-2024-2 dB-4 dB0 dB10 dB6 dB-10 dB4 dB2 dB-6 dBDiscrete BodePlotFrequency (rad/sec)Discrete Nyquist PlotReal AxisImaginary Axis三、实验仪器及材料1.计算机一台;2.MATLAB平台;3.打印机一台。
机电一体化系统设计实验指导书周慧编撰湖南工程学院机电教研室2007.9前言为了适应应用型机电类本科人才的培养,促进教学改革和教学质量的提高,配合《机电一体化系统设计》课程深入系统地教学,特遍撰了与理论课程相3的实验教材。
根据不同的培养要求,选择不同的实验内容。
本书共设五个基本实验,其中,设计型实验2个、综合型实验1个、验证型实验2个。
从机电一化系统的驱动控制、执行件运动参数的检测,到典型机电一体化系统整机的结构、控制,为学生较全面地了解机电一体化系统所涉及的知识,设置了必须了解和掌握的实验内容。
本书重点突出,选材慎重,从实验原理到实验设备、步骤、内容都有较详细的阐述。
对于设计型实验,专门设有重要的参考资料,帮助学生解决实验设计中的难题。
由于撰写时间仓促,加之个人的理论水平有限,在撰写过程中难免存在缺点和错误,敬请各位读者给予批评指正,本人不胜感激。
作者:周慧2007年9月目录1《执行元件的驱动控制及接口》实验 (12《加工中心结构与控制剖析》实验 (133《检测传感器及微机接口》实验 (194《三坐标测量机结构与控制认识》实验 (245《加工中心结构与控制认识》实验 (251 《执行元件的驱动控制及接口》实验1.1实验目的1.掌握软件脉冲分配工作原理。
2.设计简单的软件脉冲分配模拟验证电路。
1.2 实验原理在机电一体化系统中,最常用的执行元件是步进电动机。
而步进电动机的运转控制是通过对电动机绕组分配通、断电来完成的,即使用一组脉冲序列来控制电动机绕组的通、断电。
当改变脉冲序列的频率时,可以改变绕组通、断电的时间,即改变步进电动机的运转速度。
CPU根据轨迹控制要求,产生控制脉冲并启动或终止执行元件的工作。
利用开关模拟启/停控制功能;利用修改定时参数实现变速功能;利用电平变换实现通、断电控制;通过改变通、断电顺序实现电动机旋转方向的控制。
1.3实验设备与涉及的基本电路1.设备AEDK5196实验机;PC机。
机电一体化实验指导用书机械基础实验教学中心目录实验一可编程控制器与步进电机驱动 (2)实验二可编程控制器与伺服电机驱动 (7)实验三来电自动复位 (10)实验四气动回路控制 (13)实验五传感器的应用 (19)实验六自动分料机构 (28)实验一可编程控制器与步进电机驱动一、实验目的:1.掌握PLC与上位机的接线。
2.熟悉PLC的一些指令,输出脉冲信号控制步进电机。
3.熟练应用GX Developer软件。
4.了解步进电机及其驱动器的应用。
二、实验器件:1.个人电脑PC。
2.PLC实验装置,型号FX3U。
3.RS—485数据通讯线。
4.步进电机,步进电机驱动器。
5.稳压电源一台,导线若干。
三、实验内容:步进电机驱动器采用高频脉宽调制技术,具有噪声低、效率高、电压范围宽、设置灵活、保护齐全运行特性良好等优点。
步进电机接线图如下图所示:说明:LED指示灯绿灯表示驱动器正常,红灯表示报警,驱动器报警时将停止工作,需要复位才能清除报警状态。
注意:(1)当控制器的控制信号的电压为5V时,连接线路中R1电阻为0欧姆;当控制信号的电压为24V时,为保证控制信号的电流符合驱动器的要求,在连接线路中R1的电阻为2K欧姆。
(2)驱动器上的FREE接口为脱机控制信号输入端口,当控制信号回路接通时,驱动器会立即切断输出的相电流,电机此时处于自由状态。
1.Kinco2M530型驱动器采用拔位开关设定电流和细分,其拨位开关设定为设定所要驱动的步进电机的电流,应与步进电机的额定电流相适应,该实验的步进电机的额定电流为2.8A细分为32。
,具体设定如下:200*细分为一个螺距所需要的脉冲数,螺距为5mm. 注意:更改拨码开关的设定之前请先切断电源。
2.输入信号的连接:公共阳端OPTO:为输入信号的公共端,OPTO端须接外部系统的VCC。
若VCC为+5V则可直接连接,若VCC不是+5V,则须外接限流电阻R,保证给内部光耦提供8-15mA的驱动电流。
1 《执行元件的驱动控制及接口》实验1.1实验目的1.掌握软件脉冲分配工作原理。
2.设计简单的软件脉冲分配模拟验证电路。
1.2 实验原理在机电一体化系统中,最常用的执行元件是步进电动机。
而步进电动机的运转控制是通过对电动机绕组分配通、断电来完成的,即使用一组脉冲序列来控制电动机绕组的通、断电。
当改变脉冲序列的频率时,可以改变绕组通、断电的时间,即改变步进电动机的运转速度。
CPU根据轨迹控制要求,产生控制脉冲并启动或终止执行元件的工作。
利用开关模拟启/停控制功能;利用修改定时参数实现变速功能;利用电平变换实现通、断电控制;通过改变通、断电顺序实现电动机旋转方向的控制。
1.3实验设备与涉及的基本电路1.设备AEDK5196实验机;PC机。
2.芯片及基本电路CPU(8031);译码器(74LS138);并行接口(8255、74LS273、74 LS244);驱动器(74LS240)。
彩色灯电路;单色灯电路;定时器;开关电路;地址锁存电路;地址确认电路等。
3.验证参考电路选择不同执行元件和控制元件,软件脉冲环行分配的验证电路有所不同。
当不设开关控制环分演示时,可按图1-1所示模式设计验证显示电路。
当设置开关控制时,可按图1-2所示模式设计验证显示电路。
无开关控制的模拟显示参考电路参见图1-3、1-4、1-5所示,有开关控制的模拟显示参考电路参见图1-6、1-7所示。
1.4实验步骤1.设计脉冲环形分配模拟电路按三相、四相或五相步进电机的控制模式,根据指导教师分配的实验任务,在表1-1中选择模拟电路的配置方案,设计脉冲环形分配模拟电路。
提示:设计模拟电路图时,可参考《单片机原理与接口》实验指导书提供的基本电路,绘制所需的模拟电路。
2.设计脉冲环形分配程序按照单三拍、双三拍、单双混拍供电方式,设计一种脉冲环形分配程序。
其中,包括控制方式(无开关、有开关、中断)程序段;延时程序段;数据处理程序段;模拟演示程序段。
3.录入并修改程序通过PC机输入已编写好的程序,并汇编作语法检查做适当修改,使其符合自己实验所涉及的控制要求。
表1-1 模拟电路配置方案一览表4.检查实验装置检查AEDK 实验机的实际工作状态,打开机箱电源,按 键,检查数码管显示器显示状态是否正常。
通过PO 口、74LS240驱动器、单色或彩色灯,检查所使用导线是否导通。
通过单色或彩色灯、导线连接开关,检查开关的开、合状态。
5.观察软件环形分配结果按设计好模拟电路接线,随后合上AEDK 实验机的电源,再将调试好的程序传至单片机,并全速运行该程序,观察运行情况,及时记录出现的问题。
1.5实验要求与报告1.严格按操作步骤的顺序操作,接线前,先测试连线的导通状态,然后断电连线。
2.接线完成后,先自查两遍,再请实验指导老师检查一遍,方可通电。
3.不允许随意通电,或拆装实验装置。
4.记录实验调试过程中出现的问题,以及解决的方法。
5.撰写实验报告:(1)实验目的、实验设备、实验原理; (2)环形分配模拟电路接线图; (3)环形分配控制程序流程框图; (4)环形分配控制程序清单;(5)简述实验中遇到的问题及解决方法; (6)实验结论及实验体会。
1.6 实验参考资料1.延时参数的计算 (1)软件延时假设:AEDK 实验机的晶体振荡频率为f OSC =11.0592MHz ,需要延时0.2s ,采用双重计数循环来延时,则延时程序中的时间参数应按下列方法确定。
MOVdirect1,#n1 ;2T LP1: MOV direct2,#n2 ;2T LP2:NOP ;1T NOP;1T DJNZ direct2,LP2 ;2T DJNZ direct1,LP1 ;2T RET;2T① 估算延时程序的最大定时长度t = 2T +[2T +(1T +1T +2T) n 2+2T] n 1 = 4T[1+(1+n 2)n 1]当)s (0592.11101212T 6OSC f -⨯==、n 1= n 2=256时,程序循环次数最多,定时时间最长。
()[])s (285559.0256256110592.1110124t t 6m ax=⨯++⨯⨯⨯==-② 相对精确计算延时参数∵ t = 4T[1+(1+n 2)n 1] = 0.2(s )∴ 1n 460791n 1101240592.112.01n 1T 4t n 11612-=--⨯⨯⨯=--=循环参数计算值参见表1-2.所示。
表1-2 循环参数取值一览表讨论:当n 1=256、n 2=178.996时,圆整后取n 2=179,循环误差最小,但为“超时”误差。
当n 1=249、n 2=185.056时,圆整后取n 2=185,循环误差次之,并产生“欠时”误差。
在考虑其它程序语句对定时控制的影响时,可以选用有“欠时”误差的循环参数。
否则,选用误差最小的循环参数。
(2)硬件延时假设:利用定时器T0或T1提供的基本定时、计数功能,完成所需要的延时长度。
实际应用时可参考下列做法进行。
设T0——定时器,T1——计数器.,均按方式1计数。
① 估算T0、T1共同作用时最大定时长度 T0独立完成定时任务时,可产生的延时量为()f )s (071111.00592.111012212Z 2t 616OSC0160=⨯⨯=⨯-=-当T0、T1的计数器初值TL i0 = 0、TH i0 = 0时,通过T0、T1共同作用可获得最长的定时。
即()())h (294538.1(min)672296.77)s (338.46600592.1110122212Z 2Z 2t N t 61616OSC01611601 f ===⨯⨯⨯=⨯-⨯-=⨯=-式中:t ——总时间;N 1——T 1 的最大计数值;t 0——T 0 的最长定时量;Z 1——计数器T1的计数初值;Z 0——定时器T0的计数初值。
② 相对精确计算延时参数设置0.5s 的定时时钟,T0提供50 ms 的基本时钟、T1提供10次的循环定时操作,则T0、T1的计数器初值分别为H 400B 4608012100592.111050212t 2Z 6316OSC 160==⨯⨯⨯-=⨯-=- fZ 1 = 216-10=65526=FFF6H即:TL 0 = 00H 、TH 0 = 0B4H ;TL 1 = 0F6H 、TH 1 = 0FFH 。
③ T0、T1的初始化参考程序 方式控制字格式参见表1-3。
表1-3 T0、T1方式字格式TMOD = 51H ,P3.0接P3.5(T1计数脉冲输入端)。
初始化程序:MOV TMOD ,#51H MOV TL1,#0F6H MOVTH1,#0FFHMOV TL0,#00HMOV TH0,#0B4HCLR P3.0SETB TR1SETB TR0用查询方式判断T0、T1的工作情况。
当TF1=1时,约定的延时时间到。
其程序段为┆TT0: CLR P3.0JNB TF0,TT0MOV TL0,#00HMOV TH0,#0B4HSETB P3.0CLR TF0JNB TF1,TT0CLR TR0CLR TR12.并行接口的选用及初始化(1)PO口当PO口采用一般I/O口接口芯片74LS273、并通过地址译码器74LS138选择接口地址时,没有接口的初始化问题,只需使用片外寻址方式对PO口进行操作即可。
例如:输入用“MOVX A,@DPTR”,输出用“MOVX @DPTR,A”。
(2)8255芯片8255A有两个控制字:工作方式控制字、C口置位控制字。
工作方式控制字的作用:设置端口PA、PB、PC的工作模式,是三个8位I/O口,还是四个I/O口,是单向口还是双向口等。
其控制字格式如表1-4所示。
表1-4 8255方式字格式8255芯片用基本输入/输出工作模式时,初始化仅涉及芯片工作方式控制字的设置。
例如:PA口——输入、接开关,控制系统启动/停止操作;PB口——输出,接指示灯,模拟状态。
其控制字为:=82H,初始化程序:MOV A,#82HMOVX @DPTR,AC口置位控制字的作用:设置端口PA、PB在选同方式或双向方式下所需控制线的初始状态,其控制字格式如表1-5所示。
表1-5 8255 PC口工作方式控制字格式3.三相步进电动机脉冲环行分配参考程序(1)基本实验条件=00 为单三拍;①20H单元寄存脉冲分配与电机旋向模式:20H.1、20H.0 =11 为双三拍;=10 为混拍。
20H.7=0——为正转;20H.7=1——为反转。
②单三拍、双三拍、混拍环分控制字参见表1-6所示。
表1-6 三相步进电动机脉冲环行分配控制字表③P3.2——K1停止开关;P3.3——K2启动开关。
④定时器:T0,基本时间50 ms。
⑤计数器:R7——通电循环计数器;R3——延时循环计数器。
⑥寄存器:DPTR——数表指针;SP——堆栈指针;R0——脉冲值偏移量。
⑦模拟灯的连接:P1.0——DG1(或DR1);P1.1——DG2(或DR2);P1.2——DG3(或DR3)。
(2)参考程序ORG 0000HLJMP STARTORG 0100HSTART:MOV SP,#60H ;设置堆栈指针MOV TMOD,#01H ;设置定时器T0,方式1MOV DPTR,#TAB ;脉冲数据表指针WAIT1:SETB P3.2JB P3.2,W AIT1 ;若停止开关合上,则结束脉冲分配CONTINUE:WAIT:MOV P3,#0FFH ;P3口置读数状态JNB P3.3,W AIT ;若启动开关未合上,则等待启动MOV A,20H ;启动脉冲分配,取脉冲分配模式值,A ←(20H)ANL A,#03H ;保留脉冲分配模式值,即保留最低两位待查JNZ LOOP1 ;脉冲分配模式为双三、混拍时转至LOOP1处JB 20H.7,DFZ ;20H.7=1电机反转,转“单反转”程序DFZMOV R0,#0H ;单三拍,电机正转,置脉冲数表偏移量初值MOV R7,#3 ;单三拍循环计数器NEXT:JB P3.2,JS ;查询有无电机停止信号,有则停机MOV A,R0 ;取脉冲数表偏移量MOVC A,@A+DPTR ;读取脉冲分配值MOV P1,A ;输出脉冲分配值LCALL DISPLAY ;延时1sINC R0 ;脉冲数表按“+1”修正DJNZ R7,NEXT ;若三拍循环未完,则进入下一拍AJMP CONTINUE ;若三拍循环结束,则继续测试电机的运行状态DFZ:MOV R0,#03H ;单三拍反转脉冲数表偏移量初值SJMP NEXT ;转入脉冲分配操作LOOP1:JNB ACC.0,LOOP2 ;当Acc .0=0时脉冲分配为混拍方式,转LOOP2处理MOV R7,#3 ;Acc .0=1时脉冲分配为双三拍,置双三拍循环计数器JB 20H.7,SFZ ;20H .7=1时为双三拍反转,转“双反转SFZ”处理MOV R0,#06H ;置双三拍正转脉冲数表偏移量初值SJMP NEXT ;转脉冲分配操作SFZ:MOV R0,#09H ;置双三拍反转脉冲数表偏移量初值SJMP NEXT ;转脉冲分配操作LOOP2:MOV R7,#6 ;置混拍循环计数器初值JB 20H.7,HFZ ;20H .7=1时为混拍反转,转“混反转HFZ”处理MOV R0,#0CH ;置混拍正转脉冲数表偏移量初值AJMP NEXT ;转脉冲分配操作HFZ:MOV R0,#12H ;置混拍反转脉冲数表偏移量初值AJMP NEXT ;转脉冲分配操作DISPLAY:MOV R3,#20 ;延时子程序,t=20×50ms=1s,R3循环计数器初值LOOP4:MOV TH0,#4BH ;时间常数,定时50msMOV TL0,#00HHERE:SETB TR0 ;启动定时器T0JNB TF0,HERE ;查询50ms是否延时已到CLR TF0 ;50ms时间到后,清除中断标志CLR TR0 ;关闭定时器T0DJNZ R3,LOOP4 ;若1s的延时未到,将继续延时RET ;延时1s到后返回JS:SJMP JS ;脉冲分配结束TAB:DB 0FEH,0FDH,0FBH,0FEH,0FBH,0FDH ;单三拍正、反转脉冲分配值DB 0FCH,0F9H,0FAH,0FAH,0F9H,0FCH ;双三拍正、反转脉冲分配值DB 0FEH,0FCH,0FDH,0F9H,0FBH,0FAH ;混拍正转脉冲分配值DB 0FEH,0FAH,0FBH,0F9H,0FDH,0FCH ;混拍反转脉冲分配值END2 《检测传感器及微机接口》实验2.1 实验目的1.掌握位置传感器的工作原理。