机电一体化技术第六章 伺服技术
- 格式:ppt
- 大小:5.14 MB
- 文档页数:10
机电一体化与伺服技术的基本概念2009年10月20日当前,全球正面临着一场新技术革命。
这场新技术革命以信息技术为主角,极大地提高了劳动生产率和工作效率。
信息技术已成为社会经济发展中最活跃的生产力。
信息技术,特别是微电子信息技术和软件技术与机械技术的有机融合,给机械或机器)赋予了极大的柔性,使传统的机械工业焕发了青春,出现了新的机电一体化产品,带来了巨大的经济效益和社会效益。
这种微电子学和机械学的相互渗透和结合,形成了一门新兴的学科和技术,从学科上,国外称为机械电子学,从技术上,国内更多地称为机电一体化。
由于机电一体化是由多种相关学科和技术复合而成,而且目前又在不断地发展着,所以,至今还没有一个众所公认的确切定义。
就是在提出机电一体化这一概念的日本,也众说不一。
较有权威的解释是在1981年目本人提出的如下定义:“机电一体化一词乃是在机构的主功能、动力功能、信息处理功能和控制功能上引进电子技术,将机械装置与电子化设计及软件结合起来所构成的系统的总称”。
美国有关亏家所下的定义是:“机电一体化是用计算机网络协调、控制各种机械或机电部门的相互联系,以完成包括机械力、运动及能量流的动态作业”。
现代科学技术的重要特征之一,就是新技术以群体的形式出现。
多种学科和技术互相渗透,综合发展,产生出一系列的边缘学科和复合技术。
机械电子学就是这样的边缘学科,机电一体化就是这样的复合技术。
机电一体化产品就是现代最完备的技术工具。
所谓机电一体化产品,按照当前的理解,就是指精密机械技术与微电子技术、信息技术、计算机技术、电力电子技术、传感器技术、自动化技术等多种相关学科和技术有机地融合在一起,用系统工程的观点实现整体优化,从而构成一个完整的高性能产品或系统。
机电一体化作为一种技术,是许多高新技术的一种复合。
由这高新技术作为基础,构成了成千上万种机电一体化产品。
通常,把那些规模较大而又十分复杂的机电一体化产品,称为机电一体化系统,如柔性制造系统(FMs)、计算机成制造系统(cIMs)等。
《机电一体化》教学大纲课程编号:学时:50学时(3学时/周)学分:3适用专业:高职教育类机电专业考核要求:1. 熟练掌握机电一体化的基本概念和基本要素以及各部分的作用,了解机电一体化的相关技术和发展趋势,并结合实例分析机电一体化技术在机电产品中的应用。
2. 掌握机电一体化中机械系统部件的选择与设计的方法和依据,认识现代常用的传动机构、导向与支承结构、机械执行机构。
3. 了解机电一体化中微型计算机控制系统及接口设计;掌握控制系统的一般设计思路;掌握微型计算机的基本构成;认识未来计算机的发展对机电一体化的影响;掌握微型计算机应用领域、选用要点及注意事项;掌握单片机控制系统的组成和单片机芯片的选择要点。
4. 了解机电一体化中传感器与微机的接口技术,认识传感器前级信号的放大与隔离的常用方法;掌握信号在传输过程中的意义和常用的信号的变换方法。
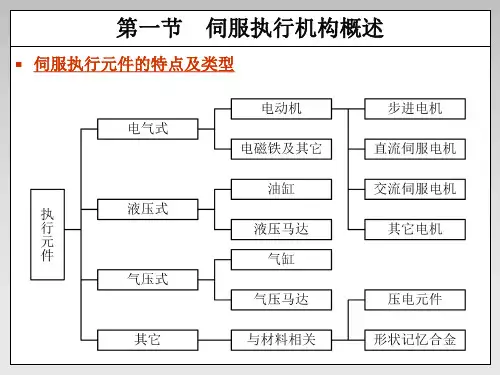
5. 掌握步进电机的工作原理、特点和主要特性以及选择方法;掌握直流伺服电机、交流伺服电机的种类、结构特点以及选择方法。
掌握开环系统和闭环系统的区别。
6. 掌握机电一体化产品的开发设计步骤。
一、课程目的和任务让学生通过掌握机电一体化的基本知识,拓宽学生的知识面。
本课程的任务是使机电工程专业的学生在机电一体化技术方面具有较广泛的知识,了解机电一体化系统(产品)涉及的相关技术,对典型机电一体化系统有一个比较全面的认识,使学生在今后的工作中具有综合应用多学科知识的能力。
二、理论教学内容第一章机电一体化的基本概念【教学目的】弄明白学习机电一体化的重要性,掌握机电设备的发展方向,弄懂机电一体化基本涵义及各部的作用与功能。
【教学重点和难点】重点:机电一体化概念及其本要素的名称、作用、要求。
难点:接口的理解,尤其是接口功能中转换功能的理解【教学内容】1、机电一体化的定义;2、机电一体化的相关技术;3、机电一体化技术的发展前景;4、机电一体化的应用实例。
【教学方法】以理论讲解为主,再举例加以说明。
机电一体化技术课后习题答案第一章绪论1-1 简述机电一体化的含义答:机电一体化是在机械的主功能、动力功能、信息功能和控制功能上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成的系统的总称。
1-2 机电一体化产品的主要组成、作用及其特点是什么?答:1.机械本体2.动力源3.检测和传感装置4.控制与信息处理装置5.执行机构机械本体用于支撑和连接其他要素,并把这些要素合理的结合起来,形成有机的整体。
动力系统为机电一体化产品提供能量和动力功能,驱动执行机构工作以完成预定的主功能。
传感与检测系统将机电一体化产品在运行过程中所需要的自身和外界环境的各种参数及状态转换成可以测定的物理量,同时利用检测系统的功能对这些物理量进行测定,为机电一体化产品提供运行控制所需的各种信息。
执行装置在控制信息的作用下完成要求的动作,实现产品的主功能。
1-3 机电一体化产品的分类有哪些?答:1.数控机械类2.电子设备类3.机电结合类4.电液伺服类5.信息控制类1-4 您在生活中还遇到哪些机电一体化产品?试分析其组成及功能。
答:工业机器人等。
工业机器人一般由机械系统、驱动系统、控制系统、检测传感系统和人工智能系统等组成。
各系统功能如下所述。
1)机械系统。
该系统主要是完成抓取工件(或工具)实现所需运动的机械部件,包括手部、腕部、臂部、机身以及行走机构。
2)驱动系统。
驱动系统的作用是向机械系统(即执行机构)提供动力。
随驱动目标的不同,驱动系统的传动方式有液动、气动、电动和机械式四种。
3)控制系统。
控制系统是机器人的指挥中心,它控制机器人按规定的程序运动。
控制系统可记忆各种指令信息(如动作顺序、运动轨迹、运动速度及时间等),同时按指令信息向各执行元件发出指令;必要时还可对机器人动作进行监视,当动作有误或发生故障时即发出警报信号。
4)检测传感系统。
它主要检测机器人机械系统的运动位置、状态,并随时将机械系统的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使机械系统以一定的精度达到设定的位置状态。
第六章10.一般说来,如果增大幅值穿越频率ωc的数值,则动态性能指标中的调整时间t s( B )A.增大B.减小C.不变D.不定11.已知f(t)=a+bt,则它的拉氏变换式为( B )A.as +b B.2sbsa+ C. bsas+2D. asbs+311. 复合控制器必定具有( D )A. 顺序控制器B. CPUC. 正反馈D. 前馈控制器13. 一般说来,如果增大幅值穿越频率ωc的数值,则动态性能指标中的调整时间t s( B )A. 产大B. 减小C. 不变D. 不定10.一般来说,引入微分负反馈将使系统动态性能指标中的最大超调量( B )A.增加B.减小C.不变D.不定11.在采样—数据系统中,执行实时算法程序所花费的时间总和最好应小于采样周期的( A )A.0.1B.0.2C.0.5D.0.86.步进电机一般用于( A )控制系统中。
A.开环B.闭环C.半闭环D.前馈11.PD称为( B )控制算法。
A.比例B.比例微分C.比例积分D.比例积分微分13.如果增加相位裕量φm,则动态性能指标中的最大超调量σ%为( C )。
A.增大B.不变C.减小D.不能确定10.若考虑系统抑制干扰的能力,选择采样周期的一条法则是:采样速率应选为闭环系统通频带的【D 】A.5倍B.8倍C.10倍D.10倍以上11.在数控系统中,软伺服系统的系统增益K a为【B 】A.(2~5)1/s B.(8~50)1/s C.(50~100)1/s D.(120~150)1/s 10.若考虑对系统响应速度的影响,采样-数据系统中的采样周期应选为系统最小时间常数的【 A 】A.(O.1~1)倍B.2倍C.5倍D.10倍11.在串联校正的比例-积分-微分(PID)控制器中,I的作用是【 C 】A.改善稳定性B.加快系统响应速度C.提高无静差度D.增大相位裕量10.在最佳阻尼比条件下,伺服系统的自然频率w n唯一取决于【 C 】A.速度环开环增益B.电动机机电时间常数C. 速度环开环增益与电动机机电时间常数之比D. 速度环开环增益与电动机机电时间常数之积11在伺服系统中,若要提高系统无静差度,可采用串联【A 】A.PI校正B.P校正C.PD校正D.D校正7.PID控制器中,P的作用是【 A 】A.降低系统稳态误差B.增加系统稳定性C.提高系统无静差度D.减小系统阻尼7.采样一数据系统中,若考虑系统的抑制干扰能力时,采样速率应为闭环系统通频带的【A 】A .10倍以上B.5倍 C .2倍 D.(0.1~1)倍8.PID控制器中,P的含义是【D 】A.前馈 B.微分 C.积分 D.比例(2011 07)9.在软伺服系统中,一般认为速度环的闭环增益最好为系统的 【 】A.0.1倍B.2~4倍C.5倍D.10倍1.PID 控制器中,I 的作用是 【 A 】A .提高系统误差精度B .增加系统通频带C .加快系统调整时间D .减小系统伺服刚度2.要求系统响应应以零稳态误差跟踪输入信号可采用 (C ) A.前馈控制器B.PI 控制器C.复合控制器D.反馈控制器3.一般说来,如果增大自然频率ωn 的数值,则动态性能指标中的调整时间t s 将 ( B ) A.增大 B.减小 C.不变 D.不定4. 在伺服系统中,若要提高系统无静差度,可采用串联 【 A 】 A.PI 校正 B.P 校正 C.PD 校正 D.D 校正5. 伺服系统的输入可以为(B )A.模拟电流B.模拟电压C.控制信号D.反馈信号 6. 伺服系统一般包括控制器、受控对象、比较器和(D )等部分A.换向结构B.转化电路C.存储电路D.反馈测量装置 7. 下列那一项是反馈控制系统( )A.顺序控制系统B.伺服系统C.数控机床D.工业机器人8. PD 称为( B )控制算法。
选择题试题库第1章机电一体化的基本概念1、对于机电一体化系统的涵义,至今还有不同的认识。
但对机电一体化的本质特性认为是一个①计算机系统②机械系统③传感系统④电气系统2、接口有三个基本功能,它们是①变换、放大、传递②变换、放大、转换③变换、放大、控制④变换、放大、处理3、机电一体化技术是各种技术相互渗透的结果,下列技术不属于其主要相关技术的是①机械技术②检测传感技术③自动控制技术④多媒体技术4、机电一体化系统由许多要素或子系统组成,各子系统之间要能顺利地进行物质、能量和信息的传递和交换,必须在各要素或子系统的相接处具备一定的连接部件,这个连接部件就称为①传感检测单元②执行单元③驱动单元④接口5、机电一体化技术的发展前景应从如下方面考虑,说法错误的是①从性能上②从功能上③从层次上④从高技术的水平上6、机电一体化技术是微电子技术向机械工业渗透过程中逐渐形成的一种综合技术。
是一门集机械技术、电子技术、信息技术、计算机及软件技术、自动控制技术及其他技术互相融合而成的多学科交叉的综合技术。
机电一体化的概念是哪国学者提出的?①中国②美国③德国④日本第2章精密机械传动与支承技术在机电一体化系统中的应用1、爬行是影响进给精度的主要因素。
为了提高进给精度,必须消除爬行现象,主要应采取措施,不正确的是①提高传动系统的刚度②尽量缩短传动链,减小传动件数和弹性变形量。
③减少摩擦力的变化④提高临界速度2、机电一体化进给传动系统,由于齿轮传动级数的增加,会使齿隙和静摩擦增加,传动效率降低,故传动级数一般不超过几级。
① 1 ② 2 ③ 3 ④ 43、机电一体化系统的惯量大,会使系统的固有频率下降,产生谐振;但系统的惯量增大也有利于①提高伺服精度②提高响应速度③扩大伺服带宽④改善低速爬行4、移动工作台的惯量折算到旋转丝杠上的转动惯量是①②③④5、齿轮传动比的分配中,遵循“前大后小”原则的是①最小等效转动惯量原则(小功率传动装置)②最小等效转动惯量原则(大功率传动装置)③质量最小原则(小功率传动装置)④质量最小原则(大功率传动装置)6、齿轮传动比的分配中,传动比分配的结果为各分传动比相等,其遵循的原则是①最小等效转动惯量原则(小功率传动装置)②最小等效转动惯量原则(大功率传动装置)③质量最小原则(小功率传动装置)④质量最小原则(大功率传动装置)7、消除间隙的齿轮传动机构中,下列调整法中能实现自动补偿的是①直齿圆柱偏心轴套②直齿圆柱锥度齿轮③直齿圆柱双片薄片齿轮错齿④斜齿圆柱轴向垫片8、滚珠丝杠副的轴向间隙调整和预紧方法中,广泛采用双螺母预紧方式,下列预紧法中最精密的是①双螺母垫片调隙式②双螺母螺纹调隙式③双螺母齿差调隙式9、同步带标记“800 DI H 300”,其中“800”表示①800mm ②长度代号为800 ③节线长度为800 mm10、谐波齿轮减速器的最大特点,下列说法错误的是①传动比大②承载能力小③传动精度高④齿侧间隙小11、滚珠丝杠副轴向间隙调整与预紧方案中,便于调整且精度最高的方案是A. 双螺母螺纹预紧B. 双螺母齿差预紧C. 双螺母垫片预紧12、滚珠的工作圈(或列)数由试验可知:第一、第二和第三圈(或列)分别承受轴向载荷的A. 20%、30%、50%B. 30%、20%、50%C. 50%、30%、20%13、数控机床要求在什么进给运动下不爬行,有高的灵敏度。