霍夫变换详解
- 格式:ppt
- 大小:349.52 KB
- 文档页数:73
hough变换直线检测主要原理
霍夫变换是一种在图像空间进行几何形状检测的方法,用于检测平面上的直线。
主要原理如下:
1. 点与直线的表示:霍夫变换使用极坐标系来表示直线,每个点在图像中表示一条通过该点的直线。
直线可以用两个参数表示:r表示离原点的距离,θ表示与x轴的夹角。
2. 累加过程:对每个点,遍历所有可能的直线参数,并在霍夫空间中进行累加。
对于每个点,对应于通过该点的所有直线,累加器中相应位置的值加1。
这个累加过程可以在霍夫空间中的一个二维数组中进行。
3. 阈值检测:当累加器中的某个值超过预设的阈值时,认为该直线存在。
这个阈值可以根据应用需求进行设置。
4. 参数反算:根据累加器中的峰值,反算出对应的直线参数(r和θ),并在图像中绘制出检测到的直线。
霍夫变换的主要优点是对于存在噪声和局部遮挡的图像仍然能够有效地检测直线。
但是其缺点是计算复杂度较高,直线的参数空间较大,需要处理大量的累加器。
同时,霍夫变换对于直线的精确定位和参数估计准确性不高,对于曲线的检测效果较差。
霍夫变换(hough transform)霍夫变换(Hough Transform)霍夫变换是一种图像处理技术,用于在图像中检测直线、圆形等几何形状。
它最早由Paul Hough在1962年提出。
霍夫变换在计算机视觉和模式识别领域得到广泛应用,特别在边缘检测和形状分析中表现出色。
一、霍夫变换原理1. 直线检测霍夫变换的直线检测基于极坐标下的直线方程:ρ = xcosθ + ysinθ。
其中,ρ表示直线与原点的距离,θ为直线与x轴的夹角。
霍夫变换通过在ρ-θ空间中进行投票,找到出现频率最高的ρ和θ组合,即可以确定一条直线。
2. 圆形检测霍夫变换的圆形检测考虑到圆心坐标和半径。
以圆心坐标(xc, yc)和半径r为变量,对每个像素点进行投票。
根据累加器中出现频率最高的圆心和半径组合,即可确定一个圆。
二、霍夫变换的步骤1. 边缘检测霍夫变换需要基于边缘图像进行处理,因此首先需要对原始图像进行边缘检测。
常用的边缘检测算法有Canny边缘检测和Sobel算子等。
2. 构建累加器对于直线检测,构建一个二维累加器数组,用于记录直线参数的出现频率。
对于圆形检测,构建一个三维累加器数组,用于记录圆心和半径的出现频率。
3. 参数空间搜索遍历边缘图像上的每个像素点,对于每个边缘像素,计算对应的ρ和θ(直线检测)或圆心坐标和半径(圆形检测)。
在累加器中相应位置加1。
4. 参数估计根据累加器中出现频率最高的位置,估计出最佳直线或圆形的参数。
可以设定一个阈值,只接受出现频率高于该阈值的参数。
5. 绘制检测结果根据参数估计的结果,在原始图像上绘制检测出的直线或圆形。
三、霍夫变换的应用1. 直线检测霍夫变换的直线检测广泛应用于计算机视觉领域。
例如,道路标线检测、物体边缘检测、图像中的几何形状检测等。
通过直线检测,可以提取出图像中的重要几何特征,为后续的图像处理和分析提供基础。
2. 圆形检测霍夫变换的圆形检测可以应用于许多领域,例如医学图像处理、目标跟踪、光学字符识别等。
一、概述霍夫变换是一种常用的图像处理技术,它可以用于检测图像中的直线、圆或者其他形状。
它具有很好的鲁棒性,可以应对图像中存在的噪声和其他干扰。
霍夫变换在计算机视觉、图像处理和模式识别领域有着广泛的应用,成为了处理图像中几何形状的重要工具。
二、霍夫变换的原理霍夫变换最初是由美国科学家保罗·霍夫在1962年提出的,用于检测图像中的直线。
后来,霍夫变换被扩展到检测圆或者其他形状。
霍夫变换的基本原理是将空间域中的坐标转换到参数域中,在参数域中对应的曲线经过的点在空间域中具有共线的特点。
通过累加空间域中的点的参数,可以找到曲线或者形状的参数方程,从而实现对图像中形状的检测。
具体来说,对于检测直线来说,可以通过霍夫变换将直线表示为参数空间中的斜率和截距,从而可以在参数空间中进行累加,最终找到直线的参数方程。
三、霍夫变换在直线检测中的应用1. 边缘检测在使用霍夫变换检测直线之前,通常需要对图像进行边缘检测。
边缘检测可以帮助找到图像中明显的过渡区域,这些过渡区域通常对应着直线的轮廓。
常用的边缘检测算法包括Sobel算子、Canny算子等。
2. 参数空间的设置为了使用霍夫变换来检测直线,需要设定参数空间的范围。
对于直线检测来说,一般可以设定直线的斜率和截距的取值范围。
3. 累加过程在设定好参数空间后,需要对图像中的边缘点进行霍夫变换的累加过程。
对于每一个边缘点,都可以在参数空间中找到对应的直线,通过对参数空间的累加,可以找到参数空间中的峰值,这些峰值对应着图像中的直线。
4. 直线检测可以根据参数空间中的峰值来确定图像中的直线。
通常可以设定一个阈值来筛选参数空间中的峰值,从而得到最终的直线检测结果。
四、霍夫变换在圆检测中的应用除了直线检测,霍夫变换也可以用于检测图像中的圆。
与直线检测类似,圆检测也需要进行边缘检测和参数空间的设定。
不同的是,在圆检测中,需要设定圆心和半径的参数空间范围。
五、霍夫变换的改进和应用1. 累加数组的优化在传统的霍夫变换中,需要对参数空间进行离散化,这会导致计算量较大。
霍夫变换原理
霍夫变换原理(Houghtransform)是一种图像处理技术,用于检测和识别二维图像中的几何形状。
它最初由美国数学家图灵奖得主Paul Hough于1962年提出,其原理根据许多几何形状的平面投影,将其分解为若干参数的变化,并利用参数的更改来识别几何形状。
原理上,霍夫变换以投影变换、空间变换和像素原始点变换为主要基础,其主要思想是由于几何形状元素,如直线、圆等,表示可以用方程式表示,因此我们可以通过计算几何形状在每一点处的投影转换函数来识别该几何形状。
通过测量投影函数参数的变化,我们可以检测到图像中的几何形状,并对它们进行分类。
此外,霍夫变换还有一种比较特殊的扩展,即概率霍夫变换(Probabilistic Hough Transform)。
该算法允许多个参数来拟合投影参数,并通过一组高斯随机变量,具有高精度和更大的漂移容忍度。
在空间变换中,概率霍夫变换可以用于检测更复杂的几何形状,如椭圆、心形等,并用于椭圆和圆的识别,从而提高检测的准确率。
此外,霍夫变换可以用于特征提取,特征提取是指从图像中提取特定的信息。
霍夫变换的特征提取利用几何特征模板来提取指定的几何元素。
例如,可以使用霍夫变换找到水平直线和垂直直线,从而找到图像中最重要的特征点。
总之,霍夫变换是一种有效的图像处理技术,具有检测和识别几何形状、特征提取和更改参数等功能,被广泛应用于计算机视觉、机器视觉、遥感图像处理、计算机图形学等领域,对与图像处理有着重
要的作用。
霍夫变换原理霍夫变换是一种用于检测图像中特定形状的技术,它在计算机视觉和图像处理领域有着广泛的应用。
霍夫变换最初是由保罗·霍夫在1962年提出的,用于检测物体在图像中的位置和形状。
霍夫变换的原理是基于数学算法,通过将图像中的像素点映射到参数空间中,并在参数空间中进行累加来实现对特定形状的检测。
本文将介绍霍夫变换的原理及其在图像处理中的应用。
首先,我们来了解一下霍夫变换的基本原理。
在霍夫变换中,我们通常以直角坐标系中的一条直线为例进行说明。
对于直线上的每个点(x, y),我们可以通过以下公式将其映射到霍夫空间中的一条曲线,ρ = xcos(θ) + ysin(θ)。
其中,ρ表示直线到原点的距离,θ表示直线与x轴的夹角。
在霍夫空间中,每条直线都对应一条曲线,而交于同一点(ρ, θ)的曲线则表示一组共线的点,也就是在图像中共线的直线在霍夫空间中交于一点。
通过对霍夫空间中的曲线进行累加,我们可以找到交于同一点最多的曲线,从而确定图像中的直线。
除了检测直线外,霍夫变换也可以用于检测圆和其他形状。
对于圆,我们可以使用三个参数(ρ, α, β)来表示,其中ρ表示圆心到原点的距离,(α, β)表示圆心的坐标。
同样地,我们可以将图像中的圆映射到霍夫空间中的曲线,并通过累加找到交于同一点最多的曲线,从而确定图像中的圆。
在实际应用中,霍夫变换可以用于图像中的边缘检测、形状匹配、目标检测等领域。
例如,在边缘检测中,我们可以先通过Canny边缘检测算法找到图像中的边缘,然后利用霍夫变换来检测直线或圆。
在形状匹配中,我们可以将待匹配的形状映射到霍夫空间中,并通过对霍夫空间中的曲线进行匹配来实现形状的检测和识别。
在目标检测中,我们可以利用霍夫变换来检测图像中的特定形状,如车牌、圆形物体等。
总之,霍夫变换是一种强大的图像处理技术,它通过将图像中的特定形状映射到参数空间中,并在参数空间中进行累加来实现对特定形状的检测。
图像处理中的霍夫变换算法霍夫变换算法是一种基于数学理论的图像处理方法,用于检测图像中的直线、圆和其他形状。
它广泛应用于计算机视觉、机器人和自然语言处理等领域。
在本文中,我们将探讨霍夫变换算法及其在图像处理中的应用。
一、霍夫变换的原理霍夫变换是一种图像处理技术,用于检测图像中的直线和圆。
它可以将图像中的点转换成一系列参数空间中的曲线。
对于每个曲线,计算它在参数空间中的过程称为霍夫变换。
在霍夫变换中,直线和圆的参数被表示为二元组 $(a, b)$ 或三元组 $(x_{o}, y_{o}, r)$。
对于直线 $(x, y)$,其参数空间可以表示为 $(a, b)$,其中 $a$ 是经过 $(x, y)$ 的斜率,$b$ 是截距。
对于圆$(x, y)$,其参数空间可以表示为 $(x_{o}, y_{o}, r)$,其中$(x_{o}, y_{o})$ 是圆心的坐标,$r$ 是半径。
在进行霍夫变换时,需要建立一个二维数组,用于记录每个参数 $(a, b)$ 或 $(x_{o}, y_{o}, r)$ 对应的曲线通过的点数。
对于每个点,计算其对应的参数,并在相应的数组元素中增加计数器。
最后,遍历整个参数空间的数组,找出计数器最大的元素,该元素对应的曲线即为图像中检测到的直线或圆。
二、霍夫变换的优点和缺点霍夫变换算法在图像处理领域中有以下优点:1. 对图像噪声不敏感:霍夫变换算法能够在噪声存在的情况下进行图像处理,而且处理后的结果不会受到噪声的影响。
2. 能够检测多条直线:霍夫变换算法能够检测到图像中的多条直线,而且没有数量限制。
3. 能够检测特殊形状:霍夫变换算法能够检测到图像中的特殊形状,如圆、椭圆、曲线等。
但霍夫变换算法也有一些缺点:1. 计算复杂度高:由于需要遍历整个参数空间的数组,霍夫变换算法的计算复杂度较高。
2. 跟分辨率有关:霍夫变换算法需要适当地选择参数空间的分辨率,否则对于某些参数可能会漏检或误检。
一、霍夫变换的基本原理1.1图像空间到参数空间的转换对于图像中共线的点集{(x0,y0), (x1,y1), ...}都经过直线y=kx+b,先在我们换一个说法,“斜率为k,截距为b的直线y=kx+b包含了所有在该直线上的点”。
一种强调的是图像中的点集,另一种强调的是直线的参数k和b,通过直线的点集去描述这条直线明显没有直接通过k,b两个参数去描述那样直接方便。
而Hough变换就是将我们“点共线”的思维转化到参数空间{k,b}进行描述,图像空间中所有经过y=kx+b的点经过Hough变换后在参数空间都会相交于点(k,b),这样,通过Hough变换,就可以将图像空间中直线的检测转化为参数空间中对点的检测。
我们不妨将y=kx+b进行一下变形:这就是Hough变换将图像空间坐标(x,y)转化为参数空间(k,b)的Hough变换式。
Hough变换的步骤(执行过程):1.在参数空间中建立一个二维(分别对应k,b)计数器,实际就是二维数组kbcnt,k维度为图像中直线斜率可能范围,b维度为图像中截距可能范围;数组中所有值都初始化为0;2.扫描图像空间中的所有点(xi,yi),Hough变换式进行图像空间到参数空间的变换(ki,bi),计数kbcnt(ki,bi)++3.设定阈值thr(图像中有多少个点共线才认为存在直线),kbcnt(ki,bi)>thr的ki,bi组成图像中的直线y=ki*x+bi然而,上面的检测直线的方案貌似还有些问题:如果图像中存在竖直的直线呢,那kbcnt的k维度岂不是要无穷大!因此,才有了另一种参数空间的方案:利用极坐标参数而非“斜率-截距式”描述直线。
极坐标中的直线表示极坐标中的直线方程为将其改写成Hough变换式,即自变量(x,y)到参数变量(r,theta)的映射:使用极坐标参数空间,Hough变换的步骤不变,只不过将kbcnt替换成rthcnt,r范围是图像对角线的长度,th范围是0~2*pi。
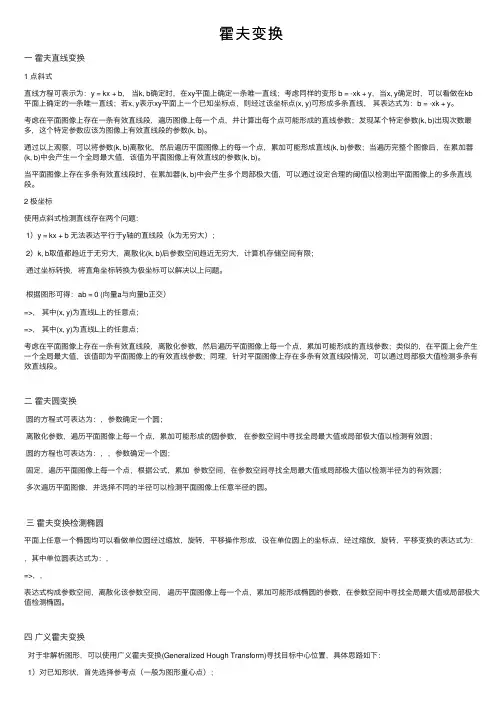
霍夫变换⼀霍夫直线变换1 点斜式直线⽅程可表⽰为:y = kx + b,当k, b确定时,在xy平⾯上确定⼀条唯⼀直线;考虑同样的变形 b = -xk + y,当x, y确定时,可以看做在kb 平⾯上确定的⼀条唯⼀直线;若x, y表⽰xy平⾯上⼀个已知坐标点,则经过该坐标点(x, y)可形成多条直线,其表达式为:b = -xk + y。
考虑在平⾯图像上存在⼀条有效直线段,遍历图像上每⼀个点,并计算出每个点可能形成的直线参数;发现某个特定参数(k, b)出现次数最多,这个特定参数应该为图像上有效直线段的参数(k, b)。
通过以上观察,可以将参数(k, b)离散化,然后遍历平⾯图像上的每⼀个点,累加可能形成直线(k, b)参数;当遍历完整个图像后,在累加器(k, b)中会产⽣⼀个全局最⼤值,该值为平⾯图像上有效直线的参数(k, b)。
当平⾯图像上存在多条有效直线段时,在累加器(k, b)中会产⽣多个局部极⼤值,可以通过设定合理的阈值以检测出平⾯图像上的多条直线段。
2 极坐标使⽤点斜式检测直线存在两个问题:1)y = kx + b ⽆法表达平⾏于y轴的直线段(k为⽆穷⼤);2)k, b取值都趋近于⽆穷⼤,离散化(k, b)后参数空间趋近⽆穷⼤,计算机存储空间有限;通过坐标转换,将直⾓坐标转换为极坐标可以解决以上问题。
根据图形可得:ab = 0 (向量a与向量b正交)=>,其中(x, y)为直线L上的任意点;=>,其中(x, y)为直线L上的任意点;考虑在平⾯图像上存在⼀条有效直线段,离散化参数,然后遍历平⾯图像上每⼀个点,累加可能形成的直线参数;类似的,在平⾯上会产⽣⼀个全局最⼤值,该值即为平⾯图像上的有效直线参数;同理,针对平⾯图像上存在多条有效直线段情况,可以通过局部极⼤值检测多条有效直线段。
⼆霍夫圆变换圆的⽅程式可表达为:,参数确定⼀个圆;离散化参数,遍历平⾯图像上每⼀个点,累加可能形成的圆参数,在参数空间中寻找全局最⼤值或局部极⼤值以检测有效圆;圆的⽅程也可表达为:,,参数确定⼀个圆;固定,遍历平⾯图像上每⼀个点,根据公式,累加参数空间,在参数空间寻找全局最⼤值或局部极⼤值以检测半径为的有效圆;多次遍历平⾯图像,并选择不同的半径可以检测平⾯图像上任意半径的圆。
霍夫变换返回的线条距离从小到大排序霍夫变换(Hough Transform)是一种常用的图像处理技术,用于在图像中检测直线、圆和其他形状。
它可以帮助我们提取出图像中的线条,并通过返回线条对应的距离值来排序。
在本文中,我们将探讨霍夫变换返回的线条距离从小到大排序的原理、应用和意义。
1. 霍夫变换的基本原理霍夫变换是由Paul Hough于1962年提出的,它的基本思想是将图像空间的直线参数空间化,从而将直线检测问题转化为参数空间中的峰值检测问题。
在霍夫变换中,参数空间被分成若干个离散的元胞(cells),每个元胞代表一个直线参数(如斜率和截距)。
然后对于图像中的每个边缘点,在参数空间的相应位置上累加计数。
通过寻找参数空间中的峰值,即累加计数最大的元胞,来检测出图像中的直线。
返回的线条距离是霍夫变换结果中的一个重要信息。
它表示检测到的直线到图像原点(或其他参考点)的距离。
返回的线条距离值从小到大排序,可以用于确定检测到的直线在图像中的位置和大小。
2. 霍夫变换的应用霍夫变换在图像处理中有着广泛的应用。
主要包括以下几个方面:- 直线检测:通过霍夫变换可以快速准确地检测图像中的直线。
在计算机视觉和模式识别领域中,直线检测是一项基础任务,常用于目标检测、边缘检测和几何变换等问题。
- 圆检测:除了直线,霍夫变换还可以检测图像中的圆。
通过对参数空间的扩展,可以实现对圆的检测和拟合,从而在图像中定位和描述圆的位置、半径和弧度。
- 形状识别:霍夫变换的思想也可以应用于其他形状的检测和识别。
通过对参数空间的离散化和累加,可以实现对其他几何形状(如矩形、椭圆、多边形)的检测和描述。
霍夫变换的应用不仅局限于图像处理领域,还具有广泛的应用前景。
在自动驾驶、机器人导航和物体识别等领域,霍夫变换可以帮助机器实现对环境中静态和动态物体的感知和理解。
3. 线条距离的排序意义霍夫变换返回的线条距离从小到大排序,具有以下几个意义:- 定位线条位置:线条距离的排序可以帮助我们确定检测到的直线在图像中的位置。
霍夫变换(Hough Transform)是一种在图像处理中用于检测形状的技术。
它被广泛应用于边缘检测、线条检测和圆检测等领域。
在正弦曲线检测中,霍夫变换可以用来检测图像中的正弦曲线。
基本原理:
霍夫变换的基本原理是将原始图像空间中的形状转换为参数空间中的累加器,通过找到累加器峰值的位置来确定形状的参数。
对于正弦曲线检测,我们可以将正弦曲线的振幅、周期和相位作为参数,使用霍夫变换来检测图像中的正弦曲线。
实现步骤:
1.边缘检测:首先需要对图像进行边缘检测,提取出图像中的边缘像素点。
常用的边缘检测算法包括Sobel、Canny等。
2.参数空间转换:将边缘像素点的坐标转换为参数空间中的形式。
对于正弦曲线,可以将振幅、周期和相位作为参数,将边缘像素点的坐标转换为这些参数的形式。
3.累加器计算:在参数空间中,对于每个可能的参数组合,计算累加器的值。
累加器的值可以通过投票的方式计算,即将相同参数组合的边缘像素点计数加一。
4.峰值检测:在累加器中寻找峰值,峰值的位置对应于正弦曲线
的参数。
通过峰值的位置可以确定正弦曲线的参数,从而检测出正弦曲线。
应用场景:
霍夫变换在图像处理中有着广泛的应用,例如在医学图像处理中用于检测心电图信号、在机器视觉中用于检测物体轮廓和线条等。
在正弦曲线检测中,霍夫变换可以用于检测图像中的振动信号、波形等,具有重要的实际意义和应用价值。
openmv霍夫变换OpenMV是一种基于Python的开源微控制器,专门设计用于嵌入式计算机视觉应用。
它支持多种图像处理算法,其中之一就是霍夫变换(Hough Transform)。
霍夫变换是一种经典的图像处理算法,用于检测图像中的直线、圆和其他形状。
在本文中,我们将介绍OpenMV中的霍夫变换算法及其应用。
一、霍夫变换的原理霍夫变换是由英国数学家霍夫(Paul Hough)于1962年提出的一种图像处理算法。
它的基本原理是将图像中的每一个像素点都映射到一个二维参数空间中,并通过统计参数空间中的投票数来检测图像中的形状。
具体来说,对于直线检测,霍夫变换将图像中的每一个点转化为两个参数:rho(ρ)和theta(θ)。
其中rho表示点到原点的距离,theta表示直线与x轴的夹角。
然后,霍夫变换在参数空间中建立一个二维累加器数组,根据图像中的点对参数空间进行投票。
最后,我们可以在累加器数组中找到投票数最多的点,从而确定图像中的直线。
二、OpenMV中的霍夫变换OpenMV内置了霍夫变换算法,可以轻松地在图像中检测直线、圆等形状。
在OpenMV中,我们可以使用`img.find_lines()`函数来检测图像中的直线。
该函数的参数包括阈值、线条长度范围和线条宽度范围等。
例如,我们可以使用以下代码在OpenMV上进行直线检测:```pythonimport sensor, image, timesensor.reset()sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QVGA)sensor.set_auto_gain(False)sensor.set_auto_whitebal(False)sensor.skip_frames(time = 2000)while(True):img = sensor.snapshot()lines = img.find_lines(threshold=1000, theta_margin=15, rho_margin=15)for line in lines:img.draw_line(line.line(), color=(255, 0, 0))print("Number of lines detected: ", len(lines))```在上述代码中,我们首先初始化摄像头,并设置图像格式、分辨率等参数。
霍夫变换的原理概述霍夫变换(Hough Transform)是一种图像处理中常用的算法,主要用于在图像中检测几何形状的存在以及对其进行分割和参数估计。
它是由霍夫于1962年提出的,通过一系列数学变换来将图像中的直线或者圆等曲线进行检测和提取。
霍夫变换的基本原理霍夫变换的基本原理是将空间坐标的点转换到参数空间中的曲线,通过对曲线在参数空间内的交点进行统计,就可以检测出图像中的特定形状。
主要包括以下几个步骤:1.边缘检测:首先对图像进行边缘检测,将图像中的边缘提取出来。
这可以使用Canny算子等边缘检测算法来实现。
2.构建霍夫空间:对于图像中的每个边缘点,在参数空间内生成曲线。
对于直线检测而言,曲线可以用参数表示:极坐标方程 r = x * cos(theta) + y* sin(theta),其中 (x, y) 是边缘点的坐标,(r, theta) 是参数空间中的点。
3.统计霍夫空间:对霍夫空间内的曲线进行统计,找到交点最多的曲线,它们所代表的直线或者圆形状就是图像中的目标。
通过统计算法,可以找到这些曲线在霍夫空间内的峰值。
4.参数估计:根据霍夫空间内的统计结果,可以得到目标的参数估计。
对于直线检测而言,可以得到直线的斜率和截距;对于圆的检测而言,可以得到圆心的坐标和半径。
霍夫变换的应用领域霍夫变换广泛应用于图像处理和计算机视觉的领域,主要包括以下几个方面:直线检测霍夫变换可以用于检测图像中的直线。
由于直线的数学表示存在一定的困难,直接从图像中提取直线是比较复杂的。
通过将直线的参数转换到霍夫空间内,就可以通过统计算法来检测图像中的直线。
圆检测霍夫变换也可以用于检测图像中的圆。
与直线检测类似,将圆的参数转换到霍夫空间内,通过统计算法找到霍夫空间内的峰值,就可以检测出图像中的圆。
图像分割在图像分割中,霍夫变换可以用于将图像中的目标对象与背景进行分离。
通过检测目标对象所对应的曲线,在霍夫空间内找到峰值,就可以划分出目标对象的区域。
霍夫直线变换原理《霍夫直线变换原理》霍夫直线变换是图像分析与处理中常用的方法,它是一种用于检测图像中直线的方法,可以快速、准确的检测出图像中所有的直线。
本文将对霍夫直线变换的原理作一个简要的介绍。
霍夫直线变换也被称为霍夫变换,它是一种基于空间变换的算法,它将一张二维图像转换为一维坐标空间,从而解决图像处理问题。
霍夫直线变换是基于空间变换的,因此要实现它,首先要构建一个空间变换矩阵。
这个空间变换矩阵由以下两个步骤构成:(1)灰度变换灰度变换是一种基于图像数字值进行变换的方法,它利用一个给定的映射关系,把原始图像数字值 data_in 映射到边缘强度data_out,这样就能够把原始图像点数据转换成边缘强度图像矩阵。
(2)边缘强度计算边缘强度计算是指以某种指定函数实际计算出边缘强度图像矩阵点数据 data_out,这个函数可以是 Sobel 算子、Prewitt 算子等,也可以是用户自定义函数。
经过上述两步,我们就得到了空间变换矩阵,也就是使用霍夫直线变换进行直线检测所需的数据。
霍夫直线变换本质上是一种极坐标变换,它将二维坐标系(x,y)转换为极坐标系(r,q),其中 r 代表直线离原点的距离,q 代表直线与 x 轴的夹角。
在极坐标系中,任意直线都可以用一个参数表示,即极轴的斜率 q,r 就是由 q 决定的,也就是说,任意直线都可以用一对(q,r)来表示,如果一条直线上有 n 个点,就可以用(q,r)表示为 n 对参数。
霍夫直线变换的核心部分是利用极坐标系中的参数来计算图像中的直线,霍夫变换算法使用极坐标系将数据分成不同的参数组,然后从中找出同一条直线的点,从而计算出该条直线的参数。
通过以上变换,就能够检测出该直线的参数,也就是可以确定该直线的斜率。
总结:霍夫直线变换是一种图像处理中非常常见的方法,它使用空间变换将图像转换成极坐标系,分析不同参数组,计算图像中直线的参数,从而实现对图像中所有直线的快速、准确检测。
霍夫变换霍夫检测-直线 前提条件 – 边缘检测已经完成,霍夫变换解决平⾯空间到极坐标空间转换。
从霍夫空间曲线图来看,取不同的像素点都汇聚在⼀个点,这表明这些个像素点都属于同⼀条直线。
(x i,y i).对于任意⼀条直线上的所有点来说变换到极坐标中,从[0~360]空间,可以得到r的⼤⼩属于同⼀条直线上点在极坐标空(r, θ)必然在⼀个点上有最强的信号出现(如上图),根据此反算到平⾯坐标中就可以得到直线上各点的像素坐标。
从⽽得到直线。
下图第⼀张为原图,第⼆张为提取边缘,第三张为直线检测并绘制。
霍夫检测-圆 极坐标变换原理: 从平⾯坐标到极坐标转换三个参数C(x0,y0,r)其中(x0,y0)是圆⼼假设平⾯坐标的任意⼀个圆上的点,转换到极坐标中:C(x0,y0,r)处有最⼤值,霍夫变换正是利⽤这个原理实现圆的检测。
霍夫圆检测对噪声⽐较敏感,所以⾸先要对图像做中值滤波。
相关函数如下:1//标准的霍夫变换HoughLines从平⾯坐标转换到霍夫空间,2//最终输出是表⽰极坐标空间霍夫变换直线概率,要⾃⼰反变换到平⾯空间,⼀般不⽤;3 HoughLinesP(int1,out1,)最终输出是直线的两个点(x1,y1,x2,y2).45霍夫直线检测HoughLinesP(out1,plinel,1,CV_PI/180.0,10,0,0);6// out1为要检测的灰度图像,plinel 为输出的直线的两点,类型为vector<Vec4f>plinel;7// 1为⽣成极坐标时候的像素扫描步长,CV_PI/180.0⽣成极坐标时候的⾓度步长,⼀般取值CV_PI/180,10为阈值,8//只有获得⾜够交点的极坐标点才被看成是直线,最⼩直线长度0最⼤间隔0;9for (size_t i=0;i<plinel.size();i++)10 {11 Vec4f hline = plinel[i];12 line(out2, Point(hline[0], hline[1]),13 Point(hline[2], hline[3]),14 colorf3, 3, 8);15 }1617霍夫圆检测HoughCircles(out2, pcircle, CV_HOUGH_GRADIENT,1, 10, 100, 30,80,100);18//out2为要检测的灰度图像,pcircle 为输出的圆⼼及半径,类型为vector<Vec3f>pcircle;19//10 最短距离-可以分辨是两个圆的,否则认为是同⼼圆,30为中⼼点累加器阈值⽤于确定圆⼼80为最⼩半径100最⼤半径,20 Mat dst = Mat(in1_image.size(), in1_image.type());21for (size_t i=0;i< pcircle.size();i++)22 {23 Vec3f cc = pcircle[i];24 circle(dst,Point(cc[0], cc[0]), cc[2], colorf3,2,LINE_AA);25 circle(dst, Point(cc[0], cc[0]), 3, colorf, 2, LINE_AA);26 }。
图像处理之霍夫变换(直线检测算法)_java图像处理之霍夫变换(直线检测算法)霍夫变换是图像变换中的经典手段之一,主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等)。
霍夫变换寻找直线与圆的方法相比与其它方法可以更好的减少噪声干扰。
经典的霍夫变换常用来检测直线,圆,椭圆等。
霍夫变换算法思想:以直线检测为例,每个像素坐标点经过变换都变成都直线特质有贡献的统一度量,一个简单的例子如下:一条直线在图像中是一系列离散点的集合,通过一个直线的离散极坐标公式,可以表达出直线的离散点几何等式如下:X *cos(theta) + y * sin(theta) = r 其中角度theta指r与X轴之间的夹角,r为到直线几何垂直距离。
任何在直线上点,x, y都可以表达,其中 r, theta是常量。
该公式图形表示如下:然而在实现的图像处理领域,图像的像素坐标P(x, y)是已知的,而r, theta则是我们要寻找的变量。
如果我们能绘制每个(r, theta)值根据像素点坐标P(x, y)值的话,那么就从图像笛卡尔坐标系统转换到极坐标霍夫空间系统,这种从点到曲线的变换称为直线的霍夫变换。
变换通过量化霍夫参数空间为有限个值间隔等分或者累加格子。
当霍夫变换算法开始,每个像素坐标点P(x, y)被转换到(r, theta)的曲线点上面,累加到对应的格子数据点,当一个波峰出现时候,说明有直线存在。
同样的原理,我们可以用来检测圆,只是对于圆的参数方程变为如下等式:(x –a ) ^2 + (y-b) ^ 2 = r^2其中(a, b)为圆的中心点坐标,r圆的半径。
这样霍夫的参数空间就变成一个三维参数空间。
给定圆半径转为二维霍夫参数空间,变换相对简单,也比较常用。
编程思路解析:1. 读取一幅带处理二值图像,最好背景为黑色。
2. 取得源像素数据3. 根据直线的霍夫变换公式完成霍夫变换,预览霍夫空间结果4. 寻找最大霍夫值,设置阈值,反变换到图像RGB值空间(程序难点之一)5. 越界处理,显示霍夫变换处理以后的图像关键代码解析:直线的变换角度为[0 ~ PI]之间,设置等份为500为PI/500,同时根据参数直线参数方程的取值范围为[-r, r]有如下霍夫参数定义:[java]view plaincopy1.// prepare for hough transform2.int centerX = width / 2;3.int centerY = height / 2;4.double hough_interval = PI_VALUE/(double)hough_space;5.6.int max = Math.max(width, height);7.int max_length = (int)(Math.sqrt(2.0D) * max);8.hough_1d = new int[2 * hough_space * max_length];实现从像素RGB空间到霍夫空间变换的代码为:[java]view plaincopy1.// start hough transform now....2.int[][] image_2d = convert1Dto2D(inPixels);3.for (int row = 0; row < height; row++) {4.for (int col = 0; col < width; col++) {5.int p = image_2d[row][col] & 0xff;6.if(p == 0) continue; // which means background color7.8.// since we does not know the theta angle and r value,9.// we have to calculate all hough space for each pixel poi nt10.// then we got the max possible theta and r pair.11.// r = x * cos(theta) + y * sin(theta)12.for(int cell=0; cell < hough_space; cell++ ) {13.max = (int)((col - centerX) * Math.cos(cell * hough_int erval) + (row - centerY) * Math.sin(cell * hough_interval));14.max += max_length; // start from zero, not (-max_length)15.if (max < 0 || (max >= 2 * max_length)) {// make sure r did not out of scope[0, 2*max_lenght]16.continue;17.}18.hough_2d[cell][max] +=1;19.}20.}21.}寻找最大霍夫值计算霍夫阈值的代码如下:[java]view plaincopy1.// find the max hough value2.int max_hough = 0;3.for(int i=0; i<hough_space; i++) {4.for(int j=0; j<2*max_length; j++) {5.hough_1d[(i + j * hough_space)] = hough_2d[i][j];6.if(hough_2d[i][j] > max_hough) {7.max_hough = hough_2d[i][j];8.}9.}10.}11.System.out.println("MAX HOUGH VALUE = " + max_h ough);12.13.// transfer back to image pixels space from hough par ameter space14.int hough_threshold = (int)(threshold * max_hough);从霍夫空间反变换回像素数据空间代码如下:[java]view plaincopy1.// transfer back to image pixels space from hough param eter space2.int hough_threshold = (int)(threshold * max_hough);3.for(int row = 0; row < hough_space; row++) {4.for(int col = 0; col < 2*max_length; col++) {5.if(hough_2d[row][col] < hough_threshold) // discard it6.continue;7.int hough_value = hough_2d[row][col];8.boolean isLine = true;9.for(int i=-1; i<2; i++) {10.for(int j=-1; j<2; j++) {11.if(i != 0 || j != 0) {12.int yf = row + i;13.int xf = col + j;14.if(xf < 0) continue;15.if(xf < 2*max_length) {16.if (yf < 0) {17.yf += hough_space;18.}19.if (yf >= hough_space) {20.yf -= hough_space;21.}22.if(hough_2d[yf][xf] <= hough_value) {23.continue;24.}25.isLine = false;26.break;27.}28.}29.}30.}31.if(!isLine) continue;32.33.// transform back to pixel data now...34.double dy = Math.sin(row * hough_interval);35.double dx = Math.cos(row * hough_interval);36.if ((row <= hough_space / 4) || (row >= 3 * hough_spa ce / 4)) {37.for (int subrow = 0; subrow < height; ++subrow) {38.int subcol = (int)((col - max_length - ((subrow - center Y) * dy)) / dx) + centerX;39.if ((subcol < width) && (subcol >= 0)) {40.image_2d[subrow][subcol] = -16776961;41.}42.}43.} else {44.for (int subcol = 0; subcol < width; ++subcol) {45.int subrow = (int)((col - max_length - ((subcol - center X) * dx)) / dy) + centerY;46.if ((subrow < height) && (subrow >= 0)) {47.image_2d[subrow][subcol] = -16776961;48.}49.}50.}51.}52.}霍夫变换源图如下:霍夫变换以后,在霍夫空间显示如下:(白色表示已经找到直线信号)最终反变换回到像素空间效果如下:一个更好的运行监测直线的结果(输入为二值图像):完整的霍夫变换源代码如下:[java]view plaincopy1.package com.gloomyfish.image.transform;2.3.import java.awt.image.BufferedImage;4.5.import com.process.blur.study.AbstractBufferedImageOp;6.7.public class HoughLineFilter extends AbstractBufferedIma geOp {8.public final static double PI_VALUE = Math.PI;9.private int hough_space = 500;10.private int[] hough_1d;11.private int[][] hough_2d;12.private int width;13.private int height;14.15.private float threshold;16.private float scale;17.private float offset;18.19.public HoughLineFilter() {20.// default hough transform parameters21.// scale = 1.0f;22.// offset = 0.0f;23.threshold = 0.5f;24.scale = 1.0f;25.offset = 0.0f;26.}27.28.public void setHoughSpace(int space) {29.this.hough_space = space;30.}31.32.public float getThreshold() {33.return threshold;34.}35.36.public void setThreshold(float threshold) {37.this.threshold = threshold;38.}39.40.public float getScale() {41.return scale;42.}43.44.public void setScale(float scale) {45.this.scale = scale;46.}47.48.public float getOffset() {49.return offset;50.}51.52.public void setOffset(float offset) {53.this.offset = offset;54.}55.56.@Override57.public BufferedImage filter(BufferedImage src, BufferedImage dest) {58.width = src.getWidth();59.height = src.getHeight();60.61.if ( dest == null )62.dest = createCompatibleDestImage( src, null );63.64.int[] inPixels = new int[width*height];65.int[] outPixels = new int[width*height];66.getRGB( src, 0, 0, width, height, inPixels );67.houghTransform(inPixels, outPixels);68.setRGB( dest, 0, 0, width, height, outPixels );69.return dest;70.}71.72.private void houghTransform(int[] inPixels, int[] outPix els) {73.// prepare for hough transform74.int centerX = width / 2;75.int centerY = height / 2;76.double hough_interval = PI_VALUE/(double)hough_sp ace;77.78.int max = Math.max(width, height);79.int max_length = (int)(Math.sqrt(2.0D) * max);80.hough_1d = new int[2 * hough_space * max_length];81.82.// define temp hough 2D array and initialize the hough 2D83.hough_2d = new int[hough_space][2*max_length];84.for(int i=0; i<hough_space; i++) {85.for(int j=0; j<2*max_length; j++) {86.hough_2d[i][j] = 0;87.}88.}89.90.// start hough transform now....91.int[][] image_2d = convert1Dto2D(inPixels);92.for (int row = 0; row < height; row++) {93.for (int col = 0; col < width; col++) {94.int p = image_2d[row][col] & 0xff;95.if(p == 0) continue; // which means background color96.97.// since we does not know the theta angle and r value,98.// we have to calculate all hough space for each pixel point99.// then we got the max possible theta and r pair.100.// r = x * cos(theta) + y * sin(theta)101.for(int cell=0; cell < hough_space; cell++ ) {102.max = (int)((col - centerX) * Math.cos(cell * hough_int erval) + (row - centerY) * Math.sin(cell * hough_interval));103.max += max_length; // start from zero, not (-max_length)104.if (max < 0 || (max >= 2 * max_length)) {// make sure r did not out of scope[0, 2*max_lenght]105.continue;106.}107.hough_2d[cell][max] +=1;108.}109.}110.}111.112.// find the max hough value113.int max_hough = 0;114.for(int i=0; i<hough_space; i++) {115.for(int j=0; j<2*max_length; j++) {116.hough_1d[(i + j * hough_space)] = hough_2d[i][j];117.if(hough_2d[i][j] > max_hough) {118.max_hough = hough_2d[i][j];119.}120.}121.}122.System.out.println("MAX HOUGH VALUE = " + max_h ough);123.124.// transfer back to image pixels space from hough par ameter space125.int hough_threshold = (int)(threshold * max_hough);126.for(int row = 0; row < hough_space; row++) {127.for(int col = 0; col < 2*max_length; col++) {128.if(hough_2d[row][col] < hough_threshold) // discard it129.continue;130.int hough_value = hough_2d[row][col];131.boolean isLine = true;132.for(int i=-1; i<2; i++) {133.for(int j=-1; j<2; j++) {134.if(i != 0 || j != 0) {135.int yf = row + i;136.int xf = col + j;137.if(xf < 0) continue;138.if(xf < 2*max_length) {139.if (yf < 0) {140.yf += hough_space;141.}142.if (yf >= hough_space) {143.yf -= hough_space;144.}145.if(hough_2d[yf][xf] <= hough_value) {146.continue;147.}148.isLine = false;149.break;150.}151.}152.}153.}154.if(!isLine) continue;155.156.// transform back to pixel data now...157.double dy = Math.sin(row * hough_interval);158.double dx = Math.cos(row * hough_interval);159.if ((row <= hough_space / 4) || (row >= 3 * hough_spa ce / 4)) {160.for (int subrow = 0; subrow < height; ++subrow) { 161.int subcol = (int)((col - max_length - ((subrow - center Y) * dy)) / dx) + centerX;162.if ((subcol < width) && (subcol >= 0)) {163.image_2d[subrow][subcol] = -16776961;164.}165.}166.} else {167.for (int subcol = 0; subcol < width; ++subcol) {168.int subrow = (int)((col - max_length - ((subcol - center X) * dx)) / dy) + centerY;169.if ((subrow < height) && (subrow >= 0)) {170.image_2d[subrow][subcol] = -16776961;171.}172.}173.}174.}175.}176.177.// convert to hough 1D and return result178.for (int i = 0; i < this.hough_1d.length; i++)179.{180.int value = clamp((int)(scale * this.hough_1d[i] + offset )); // scale always equals 1181.this.hough_1d[i] = (0xFF000000 | value + (value << 16 ) + (value << 8));182.}183.184.// convert to image 1D and return185.for (int row = 0; row < height; row++) {186.for (int col = 0; col < width; col++) {187.outPixels[(col + row * width)] = image_2d[row][col];188.}189.}191.192.public BufferedImage getHoughImage() {193.BufferedImage houghImage = new BufferedImage(ho ugh_2d[0].length, hough_space, BufferedImage.TYPE_4BYTE_AB GR);194.setRGB(houghImage, 0, 0, hough_2d[0].length, hough _space, hough_1d);195.return houghImage;196.}197.198.public static int clamp(int value) {199.if (value < 0)200.value = 0;201.else if (value > 255) {202.value = 255;203.}204.return value;205.}206.207.private int[][] convert1Dto2D(int[] pixels) {208.int[][] image_2d = new int[height][width];209.int index = 0;210.for(int row = 0; row < height; row++) {211.for(int col = 0; col < width; col++) {212.index = row * width + col;213.image_2d[row][col] = pixels[index];214.}215.}216.return image_2d;218.219.}转载文章请务必注明出自本博客!!。