maya详细绑定教程
- 格式:doc
- 大小:2.24 MB
- 文档页数:30
Arm辅助骨骼1.复制骨骼(shoulder),将手指断开。
2.两份,分别是IK、FK3.命名4.IK、FK骨骼分别方向约束SK骨骼(不保持偏移)◆注意:手腕处不添加约束Fk控制1.创建控制器◆位置:sk_clavice(锁骨)、sk_shoulder(肩)、sk_elbow(肘部)◆命名、历史……2.添加约束◆控制器方向约束fk骨骼(锁骨控制器约束sk骨骼)◆骨骼点约束控制器3.设置父子关系◆Elbow_ctrl—P—shoulder_ctrl—p—clavice_ctrl—p—back_ctrl4.sk_L_shoulder(骨骼)点约束fk_L_shoulder(骨骼)IK控制1.创建ik手柄◆RP◆在shoulder和fream之间◆选择IK手柄(effector),d、v捕捉在手腕处。
2.创建控制器◆位置:手腕、肘部正后方(极向量控制)◆命名:IK_wrist_ctrl、IK_elbow_ctrl3.创建约束◆IK_wrist_ctrl点约束ik手柄◆IK_elbow_ctrl极向量约束ik手柄◆Sk_L_shoulder(骨骼)点约束ik_L_shoulder(骨骼)4.设置Global◆将IK_wrist_ctrl、IK_elbow_ctrl打组(轴心在锁骨)◆命名:arm_IK_ctrl_GRP◆使用sk锁骨父子约束arm_IK_ctrl_GRP◆创建locator(Global_locator)◆Global_locator父子约束arm_IK_ctrl_GRP◆为IK_wrist_ctrl添加Global属性(0-10)◆设置驱动关键帧●IK_wrist_ctrl的Global属性驱动arm_IK_ctrl_GRP的约束节点Ik、FK切换1.创建控制器◆添加属性(ik_fk、IK_vis、FK_vis)●ik_fk(0-10)●IK_vis、FK_vis(on\off)2.驱动关键帧◆ik_fk属性驱动sk_shoulder、elbow、fream的约束节点的约束权重属性3.属性连接◆IK_vis连接ik控制器的显示属性◆FK_vis连接fk控制器的显示属性手腕控制1.创建控制器◆位置:wrist◆命名:fk_wrist_ctrl◆历史……2.创建约束◆fk_wrist_ctrl方向约束sk_wrist◆sk_wrist点约束fk_wrist_ctrl3.设置fk_wrist_ctrl跟着IK、FK转◆将fk_wrist_ctrl打组(fk_wrist_ctrl_GRP)●轴心在sk_wrist◆fk_elbow_ctrl方向约束fk_wrist_ctrl_GRP◆ik_wrist_ctrl方向约束fk_wrist_ctrl_GRP◆设置驱动●IK_FK_blend的IK_FK驱动fk_wrist_ctrl_GRP的约束权重设置前臂扭曲1.sk_L_wrist方向约束fk_L_wrist2.sk_L_wrist方向约束ik_L_wrist3.添加表达式◆fk_L_fream.rotateX = fk_L_wrist.rotateX*0.3;◆ik_L_fream.rotateX = ik_L_wrist.rotateX*0.3;4.设置驱动IK_FK_blend的IK_FK驱动fk_L_wrist、ik_L_wrist的约束节点的约束权重手部1.创建控制器◆位置:在手指骨骼处2.对位轴向◆为控制器打组(GRP2)◆骨骼方向约束(不保持偏移)GRP2◆删除约束节点3.添加约束◆控制器方向约束(保持偏移)骨骼◆骨骼点约束(保持偏移)控制器4.再次将控制器打组(GRP1)——为了驱动关键帧5.其他手指同上可以使用“手指控制器mel.txt”6.设置父子关系◆子关节的控制器的GRP2—p—父关节的控制器上◆最后—p—在手腕上7.设置驱动关键帧◆各手指弯曲◆手指张开、合拢。
Maya教程:The Ningyo电影怪兽绑定七步法今天火星时代与大家分享的Maya教程是The Ningyo中电影怪兽绑定方法。
该电影是Miguel Ortega和Tran Ma的第一步独立电影,两人VFX技术经验丰富。
Kickstarter在这里将要展示如何为动画片创作角色,主要负责绑定、模型、服饰/毛发以及刚体动力学。
制作人员,生物技术导演,或者是演员,无论这个角色的姓名或者称谓是什么都是一样的,我们提前创作好角色让他们在舞台上表演。
我们为动画师打好基础让他们顺利地工作,最终将这些生物跃然荧屏,制作人员不仅需要了解如何拼接以及绘制权重,而且要搞清楚诸如Python或者是Mel之类的脚本语言,这对工作进展大有裨益。
脚本语言能让人高效地工作,同时也能让制作人员把角色设计得更加丰满,这样会达到更好的效果。
在我创作The Ningyo之前,需要了解这种类似生物的信息,需要请教一些问题来了解这种生物以及它众多故事背后的概念。
我需要知道它如何运动,应该创作哪种动画片,它是会逼真地运动还是像其他的卡通人物以夸张的方式运动。
这些问题指引着我的工作,确保我能满足导演的期望,在了解完这些问题后我就可以开始创作了。
第一步:定位器和节点在设定一个节点之前,先设定定位器。
这些定位器与写的一个脚本同时产生,并且会在我选择的中心产生,一旦所有的定位器设定好,关联定位器的节点会转向生物的其他部分。
第二步:颚骨处理观察鱼的骨骼结构:通常它们的下巴有多个可以旋转和变换的位置,正如你可以在这些图片中看到的一样,第一张是摆正的姿势,第二张只是单纯的旋转,最后一张是旋转和变换的组合。
最后一张也有张开的下巴这一特定的混合图形细节来帮助产生褶皱感和逼真的肉质运动感。
第三步:面部绑定创作出控制曲线来帮着动画师绘制某种形状,我关闭并隐藏了不必要的通道属性来防止额外曲线的某些问题。
添加通道属性来控制通往下巴控制器中的呼吸形状,因为嘴张开的时候生物就会呼吸,现在动画师就可以绘制生物的相关部位了。
maya教程:骨骼绑定+蒙皮+动画日期 2011年11月19日星期六发布人豆豆来源朱峰社区我通常会确保我的模型是我喜欢的方式开始。
虽然这是不是你没有做才能使一个非法的字符,这些都是我觉得帮助的步骤。
你可以看到我在这种情况下,模型是对称的。
向下中线边缘了,我已经沿z轴为中心的模式。
我也把双脚y轴的原点。
我缩放模型的大小,我想它以及。
这几个步骤可以从长远来看更容易的事情。
我会开始前从臀部开始了模型中心6关节。
我将作为一个规则的网格单元,当我把我从来不到位,旋转或缩放的关节在x。
我只把它们翻译成地方。
这确保我有一个干净的旋转和尺度,当我开始剥皮,可以很容易地重新定位,一切回0到原来的绑定构成。
如果你有旋转的钻机上,当你开始剥皮,如果您需要取回绑定构成某种原因作出调整,你会知道什么样的地位这些关节原来当你第一次skinned.n。
现在不认为我只是随机决定6关节的关节。
这些关节的选择,并专门放置。
在中心的臀部开始,我一个联合的重心(cog)的,然后扭动的臀部之一以上,权利。
下一个是躯干的扭动。
上面的脖子和肩膀的基础之一。
颈联,然后头部的基地,然后,我们结束在头顶。
如果这是一个更复杂的钻机,具有更为现实的脊椎和ik,我会把它scurve像一个真正的脊柱会。
但由于它的fk我要保持挺直脊椎从侧面。
这将使得更容易扭动身体,而动画。
如果我们有一个scurve 脊柱x中,如果我们扭曲的躯干,它会扭动身体的角度,倾斜的同时回。
如果你现在看看这个关节链在前面视图,你可以看到,其跌幅为中心。
现在的位置注意保持腿直。
如果腿不是腿在一条直线太多可能无法弯曲你太期望他们的方式。
下一步,而仍然在前面视图中,我们将手臂关节。
锁骨,肩,肘,前臂手腕之一。
接下来,我的位置在透视图中的关节,线框模型。
我往往只是进入的角度,而不是将其放置在正交视图,因为我从所有模型周围漂浮的角度感,可以得到更好的安置。
正如你可以看到在未来的形象,我把手腕前臂关节上的共同权利。
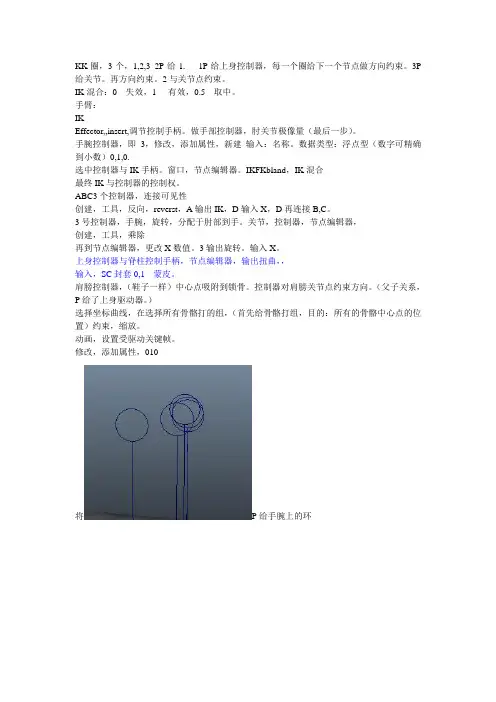
KK-圈,3个,1,2,3 2P给1. 1P给上身控制器,每一个圈给下一个节点做方向约束。
3P 给关节。
再方向约束。
2与关节点约束。
IK混合:0---失效,1----有效,0.5---取中。
手臂:IKEffector,,insert,调节控制手柄。
做手部控制器,肘关节极像量(最后一步)。
手腕控制器,即3,修改,添加属性,新建输入:名称。
数据类型:浮点型(数字可精确到小数)0,1,0.选中控制器与IK手柄。
窗口,节点编辑器。
IKFKbland,IK混合最终IK与控制器的控制权。
ABC3个控制器,连接可见性创建,工具,反向,reverst,A输出IK,D输入X,D再连接B,C。
3号控制器,手腕,旋转,分配于肘部到手。
关节,控制器,节点编辑器,创建,工具,乘除再到节点编辑器,更改X数值。
3输出旋转。
输入X。
上身控制器与脊柱控制手柄,节点编辑器,输出扭曲,,输入,SC封套0,1---蒙皮。
肩膀控制器,(鞋子一样)中心点吸附到锁骨。
控制器对肩膀关节点约束方向。
(父子关系,P给了上身驱动器。
)选择坐标曲线,在选择所有骨骼打的组,(首先给骨骼打组,目的:所有的骨骼中心点的位置)约束,缩放。
动画,设置受驱动关键帧。
修改,添加属性,010将P给手腕上的环方向约束。
ALL5。
控制器为驱动着,后两节手指为受驱动对象。
F1----指节2旋转Z,F2-----指节3旋转Z,K 一个。
将控制器F1F2设置1.将手指都调到极限位置,再次K一次。
(K错了,右键段开连接。
)设置旋转限制,以防超出控制。
矫正:按组建。
?选择点。
选中ALL头部的点,更改组建编辑器。
(蒙皮)。

Maya角色绑定和动画教程(Character Rigging and Animation)本教程通过对一个人物角色的骨骼绑定,以及走路,拉动重物的动画示范过程,让大家能更清晰的认识maya的操作以及项目制作的基本过程,能更快速的掌握maya,更快速的运用到工作中。
现今的软件更新奇快,三维动画的制作软件也在不停的更新换代,但是汉化过来的并不多,部分汉化过来的并不是完全汉化,对我们学习新的软件,帮助不是很有利。
我们要不停的学习新的东西,为了适应新的软件,所以,不能太依赖汉化版本的出现,本教程就是为了让大家尽快熟悉英文软件,所以,本教程只在基础部分做汉语注解,在项目的制作过程中,不过多的做汉语注解,但是会清楚地告诉读者操作过程的每一个步骤,以及每个命令所在的位置,大家不必担心英文不容易理解,只要多操作,多熟悉,英文对我们来说,没有什么关系的。
在很多大公司,要很多人来完成一个项目的时候,软件的版本是有规定的,基本是英文版本,而且是统一插件,统一文件命名规范的,应该全是以英文来命名文件夹,以及项目中所涉及到的需要重新命名的物体,这样是为了能让每个人都能很清楚的来完成项目中自己应该完成的部分,不至于让整个项目混乱,那样项目基本是无法来完成的。
所以我们在学习过程中,应该养成良好的操作习惯,以便在以后的工作中,能更好的融合到团队中去,不要怕麻烦,为了以后工作的效率能更高,更快,我们必须要认真对待每个细节,以免给下步工作带来不必要的麻烦。
在说了英文没什么难的,比起我们的方块字,差远了……!好了,让我们开始学习吧,尽情领略maya在三维动画制作过程中的无穷魅力。
Maya主要窗口Maya的主要窗口,如下图1。
图1 Main menus:主菜单栏。
Status Line:状态栏。
Shelves:搁置栏。
Panel menus:视窗菜单。
Tool Box:工具栏。
Quick layout buttons;快捷布局视窗。
简单的绑定绑定前先删除模型历史,保证模型历史干净.并且清楚属性栏里的数值.选择模型,点击Edit---如图架设骨架,人物骨架架设时请参考真实的人物骨节,MAYA骨架的活动跟真实是有了解的.红线分割的地方就是骨头链接的位置.这些都是人物关节活动的点,膝盖,脚踝,脚板. 选择架设好的腿部骨骼的根骨头,也就是最上级骨头,移动到合适位置,然后镜像.在大概肚脐的位置设置一个独立的骨头,作为全身的根骨头.骨头和骨头的链接只需要确定哪节骨头做父级,哪节做子级,然后做子父链接就可以.手骨,子父链接到手腕.用移动和旋转调整根骨头对上手指模型的位置.镜像手臂骨骼.最后把作为根骨头的骨骼和其他骨骼子父链接. 根骨骼是父上下部分做子给脚加IK给加好的IK成组:1组三个IK全选成组按W再按Insert 把中心移动到脚踝(按V吸附)2组中间和脚踝IK成组按W再按Insert 把中心移动到脚脚板中间(按V吸附)3组中间和脚踝IK成组按W再按Insert 也同样把中心移动到脚板中间(按V吸附)选择最父层的组group1 在此基础上再打组中心放到脚尖在group4的基础上再打一个组放到大概脚后根的位置完成!另一只脚相同修改:最后把中心的摆放顺序调整, group5作为最外层的组控制脚踝,4控制脚尖, 1控制脚根,3和2控制脚掌中间.后面控制器约束脚踝的组,修改到约束最外面的组就可以了创建线圈作为控制器.调整成需要的大小和形状把属性数值清零在调整好的控制器上打组把组的中心点调整到物体中心把控制器移动到需要的位置,注意!移动时选择控制器的组移动,不要直接移动线圈.将脚板控制器的中心移动到腿骨的脚踝位置!做一个特殊形状的控制器放到根骨头位置,作为重心控制器.整理手指控制器创建线圈,信息清零,给线圈打组.把中心点放到组的中心.选择线圈的组,移动到合适的位置,对应骨头的轴心.一定要移动线圈的组!身体其他骨骼控制器相同方法整理!开始给骨头做父子约束或位移和旋转约束!选择控制器本身,也就是线圈,去约束骨头! 用脚板控制器子父约束中心点在脚踝的组被约束的组的信息变成了蓝色,位移XYZ 旋转XYZ.这样同时约束位移和旋转的叫父子约束.重心控制器给总骨骼也做父子约束.胯部控制器给胯部的骨骼做旋转约束. 脊椎和手臂,头部的骨骼相同,也只做旋转约束.全部约束做完以后开始给所有控制器成子父链接关联起来!手掌开始是子物体,头是子物体,然后到脊椎,最后都作为重心控制器的子物体,这样重心控制器就可以控制上半身的位移和旋转.脚的控制器是和上半身分开,独立的.从手指开始,子物体的组,作为上一级控制器的子关系,上一级控制器线圈本身作为下一级控制器的父物体,子父连接好后,作为父物体控制器线圈本身的组,又作为上一级控制器线圈的子物体,以此类推.在WINDOW OUTLINER里可以看到就一只手指举例下一级于上一级控制器的子父关系,下一级的组要作为上一级控制器线圈的子物体,然后本是上一级父物体的组又要作为更上一级线圈的子物体.子父链接好后旋转重心控制器上半身所有的控制器都包括在内.做两个线圈作为膝盖的极限向量控制器.极限向量的方式也是父子约束,先选择线圈,然后选择IK.给手掌抓拳头做属性,并去动关键帧.先创建一个控制器,属性信息清零,然后子父到手腕控制器上. 选择属性栏上的EDIT 添加名字打上名字,最小值最大值默认值选择手掌控制器,选择Edit 选择驱动关键帧把手掌控制器的AAAAA属性作为驱动者Driver, 选择手指控制器的组作为被驱动者Driven 因为手指骨头已经有约束属性,所以不能再有驱动属性,手指控制器本身需要转动所以驱动只能做在手指控制器的组上.选择好后按一下KEY . 这样AAAA属性就记录了在数值为0的时候这些手指控制器的组是在当前这个位置,这些数值.因为拇指和其他手指的转动有些不同~所以分开做同样先在0的数值上K一次再在10的数值上K一次弯曲的脚的控制器属性可以用属性关联来实现控制的效果Edit种找到Connection Editor 关联属性命令ZZZ属性作为控制者装载到左边并选择ZZZ脚尖中心的组作为被驱动者装载到右边并找到RotateX属性单击一下就关联好了应为脚尖组的旋转方向是X轴所以也关联到X轴其他组相同最后选择根骨头然后加选模型蒙皮完成!!可以交作业了[文档可能无法思考全面,请浏览后下载,另外祝您生活愉快,工作顺利,万事如意!]。
maya教程:现场绑定脚骨骼日期 2011年11月19日星期六发布人豆豆来源朱峰社区朱峰社区小编在本节为大家展现的是使用maya现场绑定脚骨骼。
先说说大致原理吧。
看下面的这个方盒,大致有点走路时脚的运动规律,落地时,脚跟线落地,脚最后抬起的部分是脚趾。
这个方盒的制作:先用insert键,把方盒的旋转中心放到右下脚,在安一下insert键再把这个放盒成组一下(edit——group)。
这时,再安insert键,把旋转轴放到左下角,这里的成组的目的就是使一个物体有两个旋转轴,那个成组后的物体还是只有一个物体(可能是欺骗maya 的一种办法吧,呵呵)再制作一个locator,添加属性,名字为roll 最大值为5,最小值为-5,默认值为0,然后用驱动关键帧来设置。
roll为0时候,方盒旋转为0,roll为5时,方盒旋转-20度。
roll为-5时,成组的那个物体旋转20度。
然后设置roll的关键帧,就可以了得到上面的动画了。
(这里详细的后面设置脚的时候再细说)脚比上面的盒子还是有些区别的,因为人还有个前脚掌,所以要复杂一些,不过大体得运动是一样的,只是多了一些细节,先把腿和脚的骨骼制作出来。
最好能期上名字1——toe(脚趾)2——ball(我也不知道,怎么翻译:p) 3——heel(脚后跟)4——ankle(脚踝)5——kneel(膝盖)6——hip(臀部)在这儿就不改名字了在6——4 4——2 2——1间加 ik加好ik后2——1 ik 打组(edit——group)安insert,再按下v建,把旋转轴放到2处命名ik_16——4 ik 打组(edit——group)安insert,再按下v建,把旋转轴放到2处命名ik_2再把ik_1,ik_2 和4——2 ik 成组,安insert,再按下v建,把旋转轴放到1处命名ik_aik_a成组,安insert,再按下v建,把旋转轴放到3处命名ik_bik_b成组,安insert,再按下v建,把旋转轴放到2处命名ik_c这是outline里面的层级关系新建一个locator (create——locator)为他添加一个新的属性,来控制脚的运动。
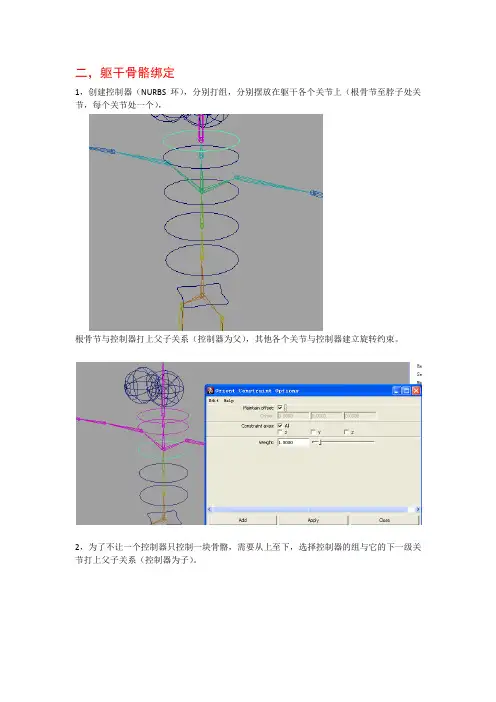
二,躯干骨骼绑定
1,创建控制器(NURBS环),分别打组,分别摆放在躯干各个关节上(根骨节至脖子处关节,每个关节处一个),
根骨节与控制器打上父子关系(控制器为父),其他各个关节与控制器建立旋转约束。
2,为了不让一个控制器只控制一块骨骼,需要从上至下,选择控制器的组与它的下一级关节打上父子关系(控制器为子)。
三,臂部骨骼绑定
1,建立三个层,分别命名为Skin,IK和FK。
2,选中一端臂骨,添加到Skin层中,复制出一条,添加到FK中,再复制出一条,添加到FK中,这样每一层都有一个臂骨
为了便于区别,为每个层的臂骨取上不同的名字
3,首先打开FK层的臂骨。
创建控制器(NURBS环),分别分组,分别吸附在臂部各个关节处,并与相应关节建立旋转约束
把控制器的组分别与它的上一级骨骼关节建立父子关系(控制器为子)
4,打开IK层的臂骨,在肩胛骨和手腕之间建立IK控制,创建一个控制器(NURBS环),吸附到IK控制手柄中心,控制器与IK建立点约束。
然后控制器与手部骨骼建立旋转约束
5,建立FK层与Skin层的关联
在Outliner中,分别打开FK层和Skin 层的组,两个组中骨骼是一一对应的(如有Arm_FK ,必有Arm_Skin与之对应),选中FK组中一个骨骼名称,加选Skin组中相应骨骼,建立旋转约束(注意选择顺序)
6,把IK层和FK层的手部骨骼删掉,只保留Skin层手部骨骼即可。
为每个手部关节建立控制器(NURBS环),每个控制器与相应关节建立旋转约束,并与上一级骨骼建立父子关系,如果控制器不能控制运动,则刷权重
7,全身骨骼绑定完毕后,为了能控制角色整体的移动缩放等调整,需要建立一个总控制器(NURBS环)进行整体控制。
[优质文档]maya教程:骨骼绑定+蒙皮+动画maya教程:骨骼绑定+蒙皮+动画日期 2011年11月19日星期六发布人豆豆来源朱峰社区我通常会确保我的模型是我喜欢的方式开始。
虽然这是不是你没有做才能使一个非法的字符,这些都是我觉得帮助的步骤。
你可以看到我在这种情况下,模型是对称的。
向下中线边缘了,我已经沿z轴为中心的模式。
我也把双脚y轴的原点。
我缩放模型的大小,我想它以及。
这几个步骤可以从长远来看更容易的事情。
我会开始前从臀部开始了模型中心6关节。
我将作为一个规则的网格单元,当我把我从来不到位,旋转或缩放的关节在x。
我只把它们翻译成地方。
这确保我有一个干净的旋转和尺度,当我开始剥皮,可以很容易地重新定位,一切回0到原来的绑定构成。
如果你有旋转的钻机上,当你开始剥皮,如果您需要取回绑定构成某种原因作出调整,你会知道什么样的地位这些关节原来当你第一次skinned.n。
现在不认为我只是随机决定6关节的关节。
这些关节的选择,并专门放置。
在中心的臀部开始,我一个联合的重心(cog)的,然后扭动的臀部之一以上,权利。
下一个是躯干的扭动。
上面的脖子和肩膀的基础之一。
颈联,然后头部的基地,然后,我们结束在头顶。
如果这是一个更复杂的钻机,具有更为现实的脊椎和ik,我会把它scurve像一个真正的脊柱会。
但由于它的fk我要保持挺直脊椎从侧面。
这将使得更容易扭动身体,而动画。
如果我们有一个scurve脊柱x中,如果我们扭曲的躯干,它会扭动身体的角度,倾斜的同时回。
如果你现在看看这个关节链在前面视图,你可以看到,其跌幅为中心。
现在的位置注意保持腿直。
如果腿不是腿在一条直线太多可能无法弯曲你太期望他们的方式。
下一步,而仍然在前面视图中,我们将手臂关节。
锁骨,肩,肘,前臂手腕之一。
接下来,我的位置在透视图中的关节,线框模型。
我往往只是进入的角度,而不是将其放置在正交视图,因为我从所有模型周围漂浮的角度感,可以得到更好的安置。
Maya 手把手教学:Maya的FBIK角色骨骼创建及皮肤绑定(基础篇)默认分类2010-12-21 14:33:45 阅读50 评论0 字号:大中小订阅一.理论介绍Maya蒙皮Bind Skin(也叫皮肤绑定)分光滑蒙皮和刚直蒙皮,前者适用于肌肉皮肤等会挤压伸缩的物体,后者适用机器人及骨架的刚硬物体。
骨骼与模型进行刚直蒙皮,模型点对应的骨骼关节权重为1,即一个点只能被一个关节所影响(光滑蒙皮则可由多个关节控制1个点);但这并不是说刚直蒙皮不能进行生物体的绑定,因为其特有的屈肌控制器,在某些情况下会比光滑蒙皮的影响物体更有效率。
蒙皮也仅仅是对物体上点进行簇权重的赋值,因此,其与变形器的作用是一样的,即不能删除历史,否则权重效果消失。
*执行蒙皮操作前,模型必须要进行历史清空操作,如果因为蒙皮前遗留过多的操作历史,在蒙皮后,可执行E dit->Delete by Type->Non-DeformerHistory,即删除非变形器的历史;但这也不是万能的,有时仍会出现些难以挽回的异常。
Maya对点的控制通常有4种方式:Weighted Deformer(变形权重),Rigid Skins(刚直蒙皮),BlendShapeDeformers(融合变形),SmoothSkins(光滑蒙皮)。
因此,对物体进行蒙皮后,仍可加入变形器进行特殊控制,包括表情制作。
BindSkin(绑定皮肤):将模型与骨骼进行绑定现在我们就先来了解下Skin(皮肤)菜单的功能。
进入Animation模块的Skin->BindSkin,在BindSkin(绑定皮肤)菜单下,有SmoothBind(光滑绑定)和RigidBind(刚直绑定)两种。
展开各自的设置选项:光滑蒙皮(Smooth Bind Skin):默认设置以Joint hierarchy(关节层级)进行蒙皮,也就是物体组或整个物体以所有关节为基本进行权重赋值;Selected joints(选择关节)仅对选择的关节部分进行权重赋值;Object hierarchy(物体层级):当选择多个物体进行蒙皮,使用该项才能赋值刚直蒙皮(Rigid Bind Skin):默认的Complete skeletion为对选择的物体进行整个骨骼的绑定;Selected joints为将当前物体进行对应骨骼的蒙皮。
MAYA角色的绑定和蒙皮今天介绍角色的绑定和蒙皮,要分几个部分,开始介绍脚部.首先导入一个人体模型,作为定义骨骼的参考.在图层面板中的skeleton上单击右键,选择Add Selected Object,把模型放到层中.将层模式设为模板选择骨骼工具,Orientation设为None.如图分别对各关节命名切换至正视图,选择leftHip关节,平移至左腿位置.选择IK工具,设为ikRP solve模式点击leftHip,再击leftAnkle,完成操作.更名为ikHandle_leftLeg.选择ik工具,设为ikSC Solve模式分别点击leftAnkle,leftFoot. leftFoot,lef tToe. 创建二ikhandle.分别命名为ikhandle_leftFoot ikhandle_left Toe这时腿部可以动了,但它不能以脚跟为支点运动,因此我们要引入控制物体.在侧视图中按数字顺序做一段骨骼,按图换名.回到透视图看看,原来把控制骨骼建到了YZ平面上.讲一个技巧,在leftRLBase先中情况下,按w转为移动工具,再按下v键进入点捕捉.鼠标中键点取左脚骨骼的任一点,就可使控制骨骼根节点与点中骨骼能者对齐.这一点在大型场景中很有效.如图,这次我选了leftAnkle节点.如图将控制骨骼移到脚骨略下,方便选取.选择ikhandle_leftleg和leftRLAnkle,按P 选择ikhandle_leftFoot和leftRLFoot,按P 选择ikhandle_leftToe和 leftRLToe,按P(RL是Rotate Locator的简写)现在脚就可以正确运动了,今天就到这了.其实是些最基本的角色动画设置,如果觉得还有些用,就回贴吧,我有空再将其它的发上来.这只是最初的哟,十分之一吧!。
骨骼创建控制器创建三、骨骼绑定1、手臂创建IK。
选择(skeleton>IK Handle T ool)打开参面板将参数设置为(ikRPsolver)方式,其它参数保持默认。
操作:依次选择上臂根部、手腕建立IK;2、腿部创建IK。
选择(skeleton>IK Handle T ool)打开参面板将参数设置为(ikRPsolver)方式,其它参数保持默认。
操作:依次选择大腿根部手腕建立IK;3、脚步创建IK。
选择(skeleton>IK Handle T ool)打开参面板将参数设置为(ikSCsolver)操作:依次选择脚踝、脚后掌骨建立IK;选择脚后掌骨、脚尖建立IK;4、身体为线性IK。
选择(skeleton>IK Spline Handle T ool)参数面板默认;操作:先选择腰部根骨骼、再选择胸部最后一节骨骼末端建立IK;5、手部控制器绑定。
将手部控制器和IK手柄建立点约束;将手部控制器和掌骨创建旋转约束。
操作:先选择控制器加选IK手柄(Constrain>point);选择控制器加选掌骨(Constrain>Orient)6、胳膊向上向量约束。
(腿部同理)操作:选择约束物体选择手腕IK手柄(Constrain>pole vector)7、脚步绑定。
操作:选择脚踝IK手柄打组(Ctrl+G、同时按下DV)移动至后脚脚掌骨末端;选择后脚掌骨IK手柄打组(Ctrl+G、同时按下DV))移动至脚尖骨末端;选择脚尖IK 手柄打组(Ctrl+G、同时按下DV))移动至后脚掌骨末端。
将其中前两个组打组按下DV将中心点移动至脚尖(控制脚以脚尖为中心旋转);将剩余两个组打组中心点移动至外侧骨骼末端(控制脚步翻转),另一侧同理;继续打组将组中心点移动至脚后跟(控制脚步整体抬起),继续打组将组合脚步线控建立父子关系,线控为父物体控制整个脚的抬起。
8、身体骨骼绑定。
maya详细绑定教程说明:文中提到的“A物P给B物”,意即A与B建立父子关系,A 是子物体,B是父物体。
文中“设置”作名词时往往是指点开某命令后的设置框。
概述:绑定即给模型添加骨骼、设置Ik、添加驱动和控制器的过程。
最先添加骨骼(骨骼本身自成一套控制系统,即Fk系统),然后给骨骼必要的部分上Ik(它是另一套控制系统,即Ik系统,一个Ik的作用是:通过控制某一关节上的Ik是其他关节连动),然后添加控制器(一般使用CV曲线,控制器的作用是驱动Ik和骨骼,当我们调动画的时候不再去动骨骼和Ik,而是只调节控制器)。
也即:控制器控制Ik与骨骼,Ik也能控制骨骼,而骨骼最终控制模型(通过蒙皮)。
以下详细讲述,以卡通小女孩为例。
一、添加骨骼。
1、从腿部开始创建骨骼如下图:需要注意的是,腿根到膝盖到脚踝之间必选是弯曲的,以使上Ik后有连动;脚踝位置;观察以脚尖和脚跟为轴在地上旋转的位置,确定脚尖与脚跟处关节的位置;大腿根部旋转轴位置;选中某一关节,insert状态下可调节其位置。
2、命名骨骼名称。
然后执行Skeleton——》Mirror Joints,注意设置项。
见图2。
图23、在腰部创建这两套关节的父关节。
并将它们P给它。
注意,此关节位置要在腿根关节略前,以保证能完成扭屁股动作。
4、顺着脊柱的大体位置和走势创建上半身和脖颈和头部的关节如下图3:注意:颈部有三个关节;下巴有两块骨骼;腋下最好有一个关节,控制胸部运动。
图35、创建上肢骨骼:图4同样注意肘部关节要弯曲。
然后:图56、创建手部关节:图6P给手腕关节:图7注意:在关节处我们会看到红绿蓝色的方向轴,选中此手柄可对其方向作相应的旋转改变,关节的旋转方向也会改变。
大拇指的方向往往需要做一定的调整,因为拇指的旋转方向较特别。
Object方向下移动关节时即是沿着这些轴的方向移动。
将手指Mirror给另一侧。
若需要命名的话则先命好名再Mirror,可减少繁琐的命名过程。
7、链接上半身与下半身,连接前单独创建一关节图8将此三个关节移至同一位置(按住V键吸附至关节),即重心位置,然后将2 P给3,再使1父子约束3,这样的设置能做到上身不动的情况下做出扭屁股的动作。
如下:8.、至此,关节创建完毕二、添加Ik。
需要添加Ik的主要是胳膊、手、腿、脚。
先看腿脚。
1、下图中关节1与2、2与3、3与4分别上一个Ik。
效果如图9。
图9图10然后即可选中某一ik进行移动旋转缩放。
如图10。
图11。
2、将图9中ik1与ik2打组为group1,ik3单独打一个组为group2。
然后将group1与group2打组为group3,将group3再打两个组group4与group5。
在大纲中如图:图123、将group1(简称g1)的控制手柄移动至(图9中)关节3处(控制脚趾旋转),g2的移至关节3(控制脚跟旋转),g3的移至关节4(控制以脚尖为中心的脚部旋转),g4的移至关节5(控制以脚跟为中心的脚部旋转),g5的移至关节2(控制以脚踝为中心的脚部移动和旋转)。
4、给ik3创建Locator,对Locator进行极向量约束Pole Vector(使膝盖能左右摆动)。
如图:图13胳膊和手处Ik设定。
如图13:图145、另一只胳膊手与腿脚做同样设置。
三、添加控制器。
命令:使用各类约束命令时先选约束物体,在加选被约束物体,单击执行。
解除约束方法是:在大纲中找到代表约束的项直接删除。
使用父子关系时,先选子物体,再选父物体,单击执行。
控制器是为了不直接控制骨骼与Ik而添加的一种装置。
创建完成后,有时需要给控制器添加一些属性,然后通过添加的属性驱动Ik的某些属性的变化。
创建属性命令如图13:图15执行后出现对话框,在对话框中设置要添加的属性名称,最小值,最大值,默认值等,如下图创建名称为Toe_rotate_X、最小值为-10、最大值为10.、默认值为0的属性:图16必须注意:创建一个将要作为控制器的部件并定好位置之后必须冻结属性。
创建作为极向量约束器的Locator也要冻结属性。
以便于控制器归位。
控制器及驱动创建流程:脚部1、给整个脚创建一个控制器。
为上述ik组group1添加驱动属性Toe_rotate_X,最大值10,最小值-10,默认值0。
如图15:图172、对此驱动属性设置驱动:打开驱动器Animate——》Set Driver Key 设置。
控制器作为驱动、group1作为被驱动,选择Toe_rotate_X为驱动属性,Rotate X为被驱动属性。
如图16:图183、在右侧属性栏中将Toe_rotate_X设为0、rotate X也设为0、单击单词rotateX(即选中被驱动属性),单击对话框中的Key键。
再将Toe_rotate_X设为10,rotateX设为70(这个值根据脚趾的可以做到的最大的旋转幅度随意设定,同样,对下面要讲到的其他group的属性的最大最小值的设置也可随意设定),单词rotateX,再单击Key。
最后Toe_rotate_X设为-10,rotateX设为-70,单词rotateX,再单击Key。
这个设置的目的即通过控制器的属性Toe_rotate_X从-10到10的变化来改变group1的属性rotateX从-70到70的变化。
对于ik组group1,只需要驱动rotateX这一属性,其他的都不需要,因为对于脚趾来说,其他属性不能发生变化。
同样,g2,g3,g4,g5,也只需要对必要的属性进行驱动即可。
总结起来,需要被驱动的属性为:g2 rotateXg3 rotateXrotateYrotateZg4 rotateXrotateYrotateZg5 不需要任何驱动,因为它本身是为了控制整个脚的运动,而它又已经P给了该控制器。
创建完成后控制器的属性栏如图17:图194、对于控制器不需要的属性可锁定并隐藏。
如下图18:图120躯干的控制器设置:1、在重心、腰、胸、脖颈中央、头与脖颈衔接处五处关节分别添加一个控制器。
冻结属性。
然后将手柄吸附到相应的关节上。
2、将控制器分别对所要控制的关节做旋转约束Constrain——》Orient。
只需要旋转约束即可。
约束时若关节发生位置偏移,可将此命令设置中Maintain Offset属性勾选,其他约束类同。
图213、将下图中控制器1 P给2,2 P给3,3 P给4,4 P给5,5作为重心控制器。
将图8中关节1 P给重心控制器。
图224、制作扭屁股的控制器,将它旋转约束(即执行Constrain——》Orient)图8中的关节2 ,然后将它P给重心控制器。
如下图23:图23 此控制器添加之后,就可上半身不动而只作扭屁股的运动。
5、制作下颌骨控制器,并将它P给头控制器(即图22中的控制器1),然后对下颌处的关节(即图22中的关节A)做旋转约束,将控制手柄吸附到该关节上。
图246、将头发、眉毛、眼睛、牙龈等物P给头控制器。
7、制作眼睛的目标约束:下图中,控制器1对右眼做目标约束(命令:Constrain——》Aim),2对左眼做目标约束,然后将1和2都P 给3。
图25至此,躯干及头部控制器完成。
胳膊处的处理(难点):胳膊处需要做两套系统,即Ik系统与Fk系统。
Ik系统用来应付身体动手不动的情况,Fk系统应付胳膊随手一起动的情况。
一般来讲,调一套动作只需要一套系统,不会同时用两套系统。
下面介绍的方法也无法做到两套系统同时使用。
流程:1、给肩部加控制器。
并将控制器控制手柄的中心移至关节1处,冻结属性,然后对关节1执行旋转约束。
并将它P给胸部控制器。
图262、给胳膊处的三个关节添加控制器作为Fk系统的控制器,如下图27,冻结属性,然后将控制手柄移至各自的关节中心,并对各自的关节执行旋转约束。
将控制器2打一个组group1,控制器3打一个组group2。
控制器1对group1做父子约束,控制器2对group2做父子约束。
图27 3、创建Ik系统的控制器。
在手腕处创建一个控制器控制肩关节到腕关节之间的Ik,如下图28中的控制器4。
图284、将控制器4对控制器3做点约束,控制器4对腕部做点约束。
5、我们选择控制器3作为Ik与Fk系统之间的切换器,这样就需要对控制器3添加一个属性,该属性包括ik与fk两项,当我们选择属性ik时,fk系统的控制器1和控制器2隐藏;选择属性fk时腕关节处的ik、控制器4和肘部的Locator隐藏(控制器3作为切换器始终显示)。
对控制器3添加此属性的对话框设置如下图29:图296、将控制器3作为驱动物体,控制器1、控制器2、控制器4、腕关节处的ik及控制器3本身分别作为被驱动物体,驱动属性始终是ikfk,被驱动属性如下:控制器1 visibility(ik时为off,fk时为on)控制器2 visibility(ik时为off,fk时为on)控制器4 visibility(ik时为on,fk时为off)腕关节处ik visibility(ik时为on,fk时为off)Ik |Bend(ik时为1,fk时为0)(Ik Bend属性为1表示此Ik被启动,可用;为0时表示被关闭,不可用)控制器3 控制器3既属于Ik系统又属于fk系统,所以需要对它的Blend Point属性做驱动,当属性ikfk为ik时Blend Point 为1,表示ik系统对它有作用;ikfk为fk时Blend Point为0,表示ik系统对它无作用,它只属于fk系统。
(控制器的Blend Point属性一般不显示,要想使它显示,我们可以对它的三个translate属性key 帧,它就会显示出来)7、将控制器1 P给胸部控制器。
8、另一边胳膊做上述1到7同样的处理。
为了理解约束的时为什么有时候对某一控制器进行约束,有时又对控制器所打的组进行约束,我们需要知道这一规则,即:对某物进行约束后,它的被约束属性就没有了自己单独改变的自由,但对它所在的组进行约束,则它仍可以自己随意改变任何属性。
9、接下来设置一个控制整个角色的控制器。
将控制重心的控制器、双脚的控制器、图28中的控制器4、膝盖与手肘处的Locator都P给它,使这个整体控制器移动旋转、尤其是缩放时,其他的所有物件如控制器、骨骼、ik都跟着移动旋转缩放。
检查缩放,胳膊处fk系统的两个控制器无法同时缩放,解决方法是:将图27中关节1对group1进行缩放约束,关节2对group2进行缩放约束。
另外,哪里还有问题,可根据具体情况对出现问题处进行特定的约束或建立父子关系。
注意:不要将ik P给整体控制器,也不要使它被整体控制器直接约束。