江苏大学线性系统理论(现代控制理论)考试必备--第3章
- 格式:ppt
- 大小:4.08 MB
- 文档页数:7
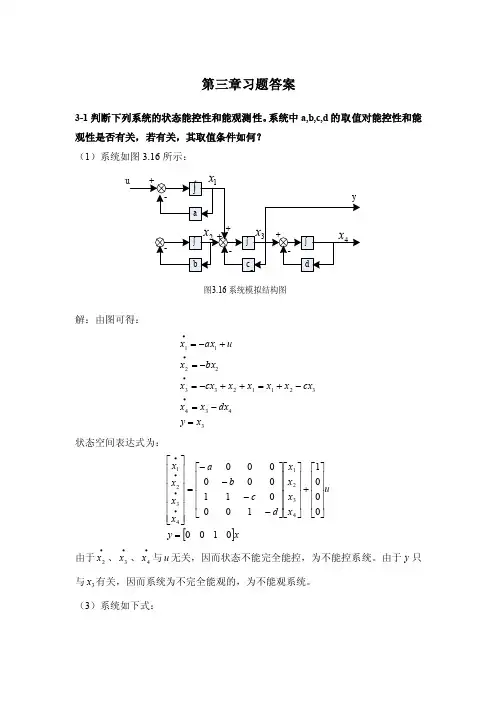
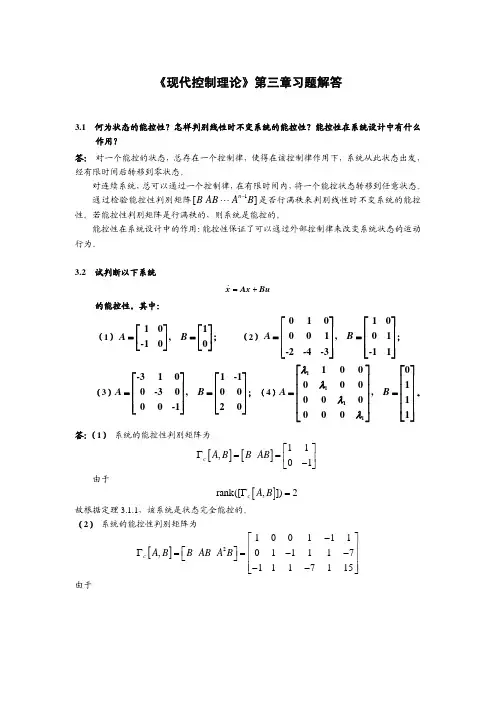
第三章习题答案3-1判断下列系统的状态能控性和能观测性。
系统中a,b,c,d 的取值对能控性和能观性是否有关,若有关,其取值条件如何? (1)系统如图3.16所示:图3.16 系统模拟结构图解:由图可得:343432112332211x y dx x x cx x x x x cx x bx x u ax x =-=-+=++-=-=+-=∙∙∙∙状态空间表达式为:[]xy ux x x x d c b a x x x x 0100000110001100000043214321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙由于∙2x 、∙3x 、∙4x 与u 无关,因而状态不能完全能控,为不能控系统。
由于y 只与3x 有关,因而系统为不完全能观的,为不能观系统。
(3)系统如下式:x d c y ub a x x x x x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∙∙∙00000012200010011321321 解:如状态方程与输出方程所示,A 为约旦标准形。
要使系统能控,控制矩阵b 中相对于约旦块的最后一行元素不能为0,故有0,0≠≠b a 。
要使系统能观,则C 中对应于约旦块的第一列元素不全为0,故有0,0≠≠d c 。
3-2时不变系统X y u X X ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=∙111111113113试用两种方法判别其能控性和能观性。
解:方法一:[]⎥⎦⎤⎢⎣⎡==⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--=2-2-112-2-11AB B M 1111,1111,3113C B A系统不能控。
,21<=rankM ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎦⎤⎢⎣⎡=44221111CA C N 系统能观。
第三章线性控制系统的能控性与能观测性分析3.1 线性连续系统的能控性3.2 线性连续系统的能观测性3.3 对偶原理3.4 线性离散系统的能控性和能观测性3.5 线性系统的结构分解3.6 线性连续系统的实现3.7 传递函数与能控性及能观测性之间的关系系统n x x x ,,,21L 状态1u 2u n u 1y 1y ny M M M M为什么要讨论系统的能控性和能观测性?能控性(Controllability)和能观测性(Observability)深刻地揭示了系统内部结构关系,由R.E.Kalman于60年代初首先提出并研究的这两个重要概念。
在现代控制理论的研究与实践中,具有极其重要的意义。
事实上,能控性与能观测性通常决定了最优控制问题解的存在性。
在极点配置问题中,状态反馈存在性由系统能控性决定;在观测器设计和最优估计中,涉及系统能观测性条件。
在本章中,我们的讨论将限于线性系统。
将首先给出能控性与能观测性的定义,然后推导出判别系统能控和能观测性的若干判据。
3.1.1 概述3.1 线性连续系统的能控性能控性和能观测性就是研究系统这个“黑箱”内部状态是否可由输入影响和是否可由输出反映。
u x x x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡−=⎥⎦⎤⎢⎣⎡2150042121&&[]⎥⎦⎤⎢⎣⎡−=2160x x y [例3.1]给定系统的描述为将其表为标量方程组形式,有:u x x+=114&u x x2522+−=&26x y −=分析:x 1、x 2受控于u y 与x 1无关y 与x 2有关[例3.2]:判断下列电路的能控和能观测性左上图:输入u(t),状态x(t),输出y(t)。
(t),x2(t)。
右上图:输入u(t),状态x1左图:输入u(t),状态x(t),x2(t),1输出y(t) 。
3.1.2 能控性的定义Ut B X t A X )()(+=&线性时变系统的状态空间描述:∑:),,,D C B A ()1.3)()()((U t D X t C t Y +=Jt ∈00)(X t X =其中:X 为n 维状态向量;U 为m 维输入向量;J 为时间t 的定义区间;A 为n*n 的元为t 的连续函数矩阵;B 为n*m 的元为t 的连续函数矩阵。