RoboCup守门员动作与策略的研究和实现
- 格式:pdf
- 大小:457.00 KB
- 文档页数:2

机器人足球比赛战术分析研究机器人足球是指使用机器人作为足球比赛的参赛队员,通过操控机器人实现比赛的进行。
在机器人足球比赛中,战术是非常重要的,不同的战术可以决定比赛的胜负。
本文将针对机器人足球比赛的战术进行分析研究。
一、攻守转换快速在机器人足球比赛中,攻守转换快速是非常重要的战术之一。
在比赛中,当球队掌握了球权,应该尽快将球送入对方半场,并寻找进攻的机会。
如果球队没有掌握球权,应该立刻组织好防守,防止对方进攻得分。
攻守转换快速的优点在于可以在短时间内改变比赛的局势,从而取得胜利。
二、守门员出击在机器人足球比赛中,守门员的作用非常重要。
传统足球比赛中,守门员只需要在球门附近待命,拦截对方的射门即可。
但是在机器人足球比赛中,守门员不仅需要在球门附近守卫,还需要积极参与进攻。
守门员出击的效果在于能够吓唬对方球员,并且能够将球传到对方半场。
但是,过于频繁的守门员出击也会带来风险,如果守门员没有掌握好时机,在出击的过程中被对方球员突破,进球难以避免。
三、快速传球在机器人足球比赛中,快速传球是一项非常重要的战术。
如果一个球队能够掌握好快速传球的技巧,那么他们可以在短时间内破解对方的防守线,从而打进一球。
快速传球的关键在于球员之间的默契,球员们需要在熟练的技术基础上,进行良好的沟通和配合。
四、侧翼突破在机器人足球比赛中,侧翼突破是一种比较常见的战术方式。
当比赛进入到中场阶段时,球队可以通过侧翼的突破,进入到对方半场。
对于守方来说,侧翼突破也是比较难以应对的一种战术方式,在疲劳状态下,守方球员的反应速度下降,侧翼突破的成功率相对较高。
五、灵活变阵在机器人足球比赛中,适当的变阵可以改变比赛的格局,提高球队的竞争力。
在比赛中,如果自己的策略无法得到很好的实施,可以适当地变换战术,从而适应对方的游戏风格,使比赛更加有变数。
总之,机器人足球比赛的战术方式有很多种,不同的战术可以应用在不同的比赛环境中。
在比赛中,发挥自己的特长,尽量避免失误和犯规,才能够取得更好的成绩。
第四章RoboCup3D仿真比赛中个体技术的设计在RoboCup3D仿真比赛中,11个球员为了完成赢得比赛的共同目标而互相合作。
两个球队之间的对抗实际上就是两个球队策略程序之间优劣的较量。
比赛的结果很大程度上是由球员所具备的技能来决定的。
仿真比赛客户端程序中,球员的技能实际上就是它所具备的能完成某个动作的能力,一个球员的行为特点也与它具备的技能有关,在多智能体系统中,单个智能体的技能对整个多智能体系统的性能有很大影响,体现在RoboCup3D中就是单个球员所具备的能力。
球员所具备的技能可以分解成许多基本的动作,一些高级的动作正是由一系列基本的动作所组成的,整个球队的策略都可以理解为单个球员技能的协调与合作。
球员的动作分为高层动作和中层动作以及底层动作[29]。
如图4.1所示,较高的动作都是通过调用一系列较低一层的动作来实现,最底层的动作实际上也就是最基本的指令(dash, kick, beam, say等),这些指令是能被服务器直接理解和接受的,每个球员根据当前的世界模型的状态来决定执行相应的技能动作。
而中层动作包括射门、守门、拦截、带球等。
高层动作一般是指由两个或两个以上的机器人通过相互配合完成的动作,如一射一传、二过一以及下底传中等[30-31]。
其中要注意的是,选择某个技能动作只是产生了一系列基本命令的集合而已,而服务器并不能保证一定可以执行这些指令集合。
比如有个球员要执行跑位的战术动作,但是它的体力值已经耗尽,而执行这个复合动作包含着dash这样的基本指令,根据Server的说明,执行dash动作需要消耗一定的体力值,所以只有当体力值大于dash所要求的才可以响应。
本章主要针对踢球、拦截、射门、守门、带球这几个动作进行分析讨论。
图4.1个体动作的层次关系4.1 踢球动作的设计踢球动作有一定的复杂性,首先需要弄清它的基本模型。
我们知道,球员的半径为0.22m,球的半径为0.111m,而踢球半径是0.04 m,直接加和就是0.371m,因此踢球时球员和球心平面距离的取值范围是0.32m到0.38m。

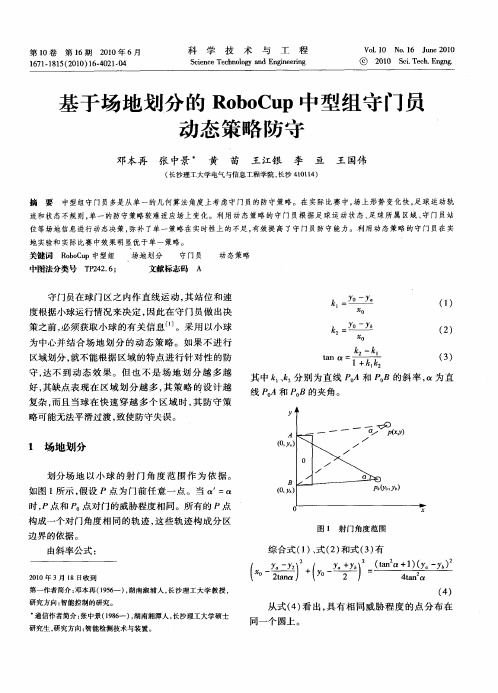
题目:RoboCup守门员策略研究姓名鲁明学院土木工程学院专业工程管理年级 2010级学号 20103415111指导教师刘飞1目录1 引言 (3)2 扑球动作设计 (3)3 基于球位置决策的扑球动作 (4)3.1球位置决策 (4)3.2基于球位置决策的扑球动作 (5)4守门员跑位 (7)5 测试结果 (8)6 结束语 (8)参考文献 (9)2RoboCup 守门员策略研究鲁明摘要:RoboCup 作为研究多智能体的理想平台,已成为人工智能的研究热点。
在最新的RoboCup3D人形机器人仿真平台中,守门员的技术和决策对提升全队的战斗力起到重要作用。
讨论了SEU-RedSun 守门员扑球动作、跑位策略、扑球决策的实现,建立了球自由运动的模型,提出了基于球位置预测的扑球决策方法。
经RoboCup 2008 世界杯实际比赛的检验,SEU-RedSun 守门员表现出强大的防守能力。
关键词:人形机器人;R o b o C u p ;3 D 仿真;守门员;位置预测1 引言RoboCup 是一个国际性的研究和教育组织,通过提供一个标准问题来促进人工智能和智能机器人的研究[1]。
RoboCup3D仿真比赛不考虑硬件条件的限制,用软件尽量模拟真实世界中的足球比赛情况,其服务器RoboCup Soccer Server 3D (rcssserver3d) 是由RoboCup组委会开发和维护的机器人足球仿真平台,它是一个实时的机器人物理仿真器,并实现了多种传感器和执行器[2]。
2007年的美国Atlanta国际机器人足球锦标赛中,3D 仿真比赛首次使用人形机器人模型。
此后一年多的时间里,rcssserver3d 一直处在不断的更新中。
在RoboCup 2008 世界杯上,3D 仿真组比赛平台为最新的rcssserver3d 0.6.0。
随着rcssserver3d 的发展,守门员对全队战斗力的提升越来越重要。
在以往的se加以限制,物理仿真更为真实,球员的踢球力量大为减小,球速也随之降低,这使得守门员的扑救能够更加有效。


仿真机器人足球防守策略的分析与研究的开题报告一、选题背景和意义随着机器人技术的不断发展,机器人已经逐渐成为社会生产和生活的重要组成部分。
在足球比赛中,机器人足球的出现为人们带来了全新的足球观赏体验,同时也提高了足球比赛的科技含量,受到了广泛的关注和喜爱。
在机器人足球比赛中,防守是比赛中非常重要的一个环节。
机器人足球防守需要克服诸多困难,如视觉处理、快速反应等方面。
而仿真技术可以为机器人足球防守提供许多有益的支持,为机器人足球防守策略的研究提供了很好的手段和方式。
因此,本文选取仿真机器人足球防守策略的研究为研究对象,以期提高机器人足球防守策略的效率和准确率,同时丰富足球比赛的科技含量,并且探索机器人技术在足球领域中的应用。
二、研究内容和方法研究内容:本研究主要研究仿真机器人足球防守策略。
具体包括以下几个方面:1. 仿真机器人视觉处理技术的研究;2. 仿真机器人的运动控制算法研究;3. 仿真机器人足球防守策略的设计与实现;4. 仿真机器人足球防守策略的优化及其效果分析。
研究方法:本研究主要采用以下研究方法:1.文献综述法:回顾国内外关于仿真机器人足球防守策略的研究现状,分析存在的问题与不足,为本项研究提供理论基础;2.仿真实验法:使用开源的仿真机器人足球平台RoboCup Soccer Simulator进行仿真实验,对防守策略进行测试、验证与优化,分析不同策略对防守效果的影响,同时提高实验的可重复性和可比较性;3.数学建模法:通过对机器人足球防守过程的分析和抽象,使用数学模型构建仿真防守策略,通过模型求解得到最优的防守策略。
三、预期目标和意义预期目标:1. 研究仿真机器人视觉处理技术和运动控制算法,设计出一套高效、稳定的仿真机器人足球防守策略;2. 基于仿真实验,测试、验证和优化防守策略,提高防守策略的准确度和可靠性;3. 提高机器人足球比赛的趣味性和科技含量,并推动机器人技术在足球领域的应用。
意义:1. 增加机器人足球比赛的娱乐性和科技含量,吸引更多的群众关注机器人足球比赛;2. 推动机器人技术在足球领域的应用,促进机器人技术和足球运动的发展相互促进;3. 为其他领域的机器人应用提供经验和技术支持,推广和普及机器人技术的应用。




第四章UvA Trilearn头文件与类ActHandler.h文件描述:This file contains the class declarations for the ActHandler that handles the outgoing messages to the server.全局函数:void sigalarmHandler (int i)该函数在SIGALARM信号到达时被执行。
该信号到达时间由SenseHandler定义。
当信号到达时,ActHandler中的命令队列里的命令被发送到服务器。
全局变量:Logger Logclass ActHandlerDetailed DescriptionThe ActHandler Class is used in the RoboCup Soccer environment to send the commands to the soccerserver. The ActHandler contains a queue in which the commands are put. When a signal arrives (set by the SenseHandler depending on the time of the sense_body message) the commands that are currently in the queue are converted to text strings and send to the server. The sent commands are also passed to the WorldModel, such that the WorldModel can update its internal state based on the performed actions. It is possible to send more than one command to the server at each time step, but some type of (primary) commands can only be sent once (kick,dash, move, tackle, turn and catch). Therefore internally different two queues are stored. One with only one element, namely the last entered primary command. And a separate queue containing all other commands. Each time a command is put into the queue that is already there, the command is updated with the new information. Furthermore it is also possible to directly send commands (or text strings) to the server. These methods can be used when an initialization or move command has to be sent to the server and you're sure this information is final, i.e. the message will not become better when new information arrives from the server.注:该类用于在机器人足球赛环境内向服务器发送命令。

基于有限状态机的Robocup足球机器人策略设计-守门员绪论简介RoboCup(Robot World Cup)即机器人世界杯足球锦标赛,以MAS(Multi-Agent System)和DAI(Distributed Artificial Intelligence)主要研究背景。
主要目的就是通过提供一个标准的易于评价的比赛平台,促进DAI与MAS的研究与发展。
(右图为机器人世界杯足球赛标志)1997年,是人工智能和智能机器人研究史上重要的一年,本年5月,IBM的深蓝机器人击败了人类国际象棋冠军,人工智能领域四十多年的挑战终于成为现实;7月4日,NASA的“火星探路者”飞行器及其配置的自主移动机器人系统,Sojourner,成功地在火星表面登陆;也就在这一年,首届RoboCup比赛及会议在日本的名古屋举行,为实现机器人足球队击败人类足球世界冠军的梦想迈出了坚实的第一步。
加拿大不列颠哥伦比亚大学的教授Alan Mackworth在1992年的论文《On Seeing Robots》(新加坡世界科学出版社:《计算机视觉:系统、理论与应用》)中提出训练机器人进行足球比赛的设想。
1992年10月,在日本东京举行的《关于人工智能领域重大挑战的研讨会》上,与会的研究人员对制造和训练机器人进行足球比赛以促进相关领域研究进行了探讨。
1996年,RoboCup国际联合会成立,并在日本举行了表演赛,以后每年举办一届。
RoboCup的使命是促进分布式人工智能与智能机器人技术的研究与教育。
通过提供一个标准任务,使得研究人员利用各种技术,获得更好的解决方案,从而有效促进相关领域的发展。
他的最终目标是经过五十年左右的研究,使机器人足球队能战胜人类足球冠军队。
机器人足球赛涉及人工智能、机器人学、通讯、传感、精密机械和仿生材料等诸多领域的前沿研究和技术集成,实际上是高技术的对抗赛。
国际上最具影响的FIRA和RoboCup两大世界杯机器人足球赛,有严格的比赛规则,融趣味性、观赏性、科普性为一体。

防御性守门员技术训练与竞技实践足球场上,守门员是球队的最后防线,其技术水平直接关系到球队的胜负。
要想成为一名出色的守门员,单纯的身体素质远远不够,必须具备防御性守门员的专业技术。
而这样的专业技术不是天赋所能带来的,需要透过耐心与专业的训练才能获取。
在本文中,我将探讨防御性守门员的技术训练以及其在竞技场上的实践。
一、基础训练防御性守门员的基础训练主要是基本技术的练习。
首先,守门员应该具备基本的防守动作。
其次,他们应该精通基本的球门扑救技术。
包括侧扑、倒地扑、高球扑等。
此外,守门员还应该学会定位和出击。
在比赛中,守门员必须通过自己的判断和预测,快速出击并拦截对方的攻势。
因此,对于守门员而言,出击是非常关键的技术,这需要在平时的训练中进行刻意练习和模拟。
二、反应能力训练守门员的反应能力及时判断能力是非常重要的,这是他们能否在短时间内准确地作出响应的关键。
在训练中,可以通过跑位、灵活性和快速反应的训练来提高反应能力。
同时在训练中也可以运用一些球技控制和传递的练习,比如传递方式的转变,有意识的提高难度和速度等,从而对守门员的反应能力进行理性练习。
三、心理训练在比赛中,守门员不仅需要具备精湛的技能,更需要具备稳定的心态。
在比赛时,面对对方的多次射门,守门员要始终保持冷静,并发挥出自己的技能。
因此,心理训练也是守门员必不可少的一个环节。
可以通过训练来提高自信心、增强耐性、调整情绪等,从而在比赛中发挥最佳状态。
四、竞技实践在熟悉了基础技能和训练后,守门员就可以参加真正的竞技比赛。
在比赛中,守门员可以更加全面地锻炼自己的技能。
此外,还可以采取一些特殊战术和策略进行磨合。
比如,通过不同的方位和投掷方式来迷惑对方,对进攻球员的策略应有备无患,从而更好地激发出守门员的技能和能力。
总结防御性守门员的训练和竞技实践是一个相互促进的过程。
良好的基础训练可以为竞技提供坚实的保障。
而竞技实践也可以帮助守门员更好地理解自己的技能和发现自己的不足,从而进一步完善自己的技能。

守门员手部动作训练教案作为足球比赛中的重要角色,守门员的表现直接影响着球队的成绩。
而守门员的手部动作训练是非常重要的一部分,因为他们需要有快速、准确的反应能力和出色的扑救能力。
因此,本文将为您介绍一份守门员手部动作训练的教案,希望能够帮助到正在进行守门员训练的教练和球员们。
一、基本动作训练。
1. 扑球动作训练。
守门员的主要任务就是扑住球,因此扑球动作训练是非常重要的一环。
在训练中,可以让守门员站在球门前,由教练或者其他队员发球,守门员需要迅速做出反应,扑住球。
可以通过不同方向和高度的球来进行训练,提高守门员的扑救能力。
2. 接球动作训练。
除了扑球,守门员还需要有出色的接球能力。
在训练中,可以让守门员站在球门前,由教练或者其他队员向他们传球,守门员需要迅速做出反应,接住球。
同样可以通过不同方向和高度的球来进行训练,提高守门员的接球能力。
3. 扑救动作训练。
在比赛中,守门员需要做出各种各样的扑救动作,因此在训练中也需要进行相应的训练。
可以通过模拟比赛中的各种扑救动作,例如侧扑、倒地扑球、高空扑球等,让守门员进行训练,提高他们的扑救能力。
二、手部力量训练。
除了基本的动作训练,守门员的手部力量也是非常重要的。
因为他们需要用手臂和手部来扑住球或者接住球,因此手部力量的训练是必不可少的。
以下是一些手部力量训练的方法:1. 弹力球训练。
可以让守门员使用弹力球进行训练,通过挤压弹力球来增强手部的力量。
可以让守门员每天进行一定次数的弹力球训练,逐渐增加训练的难度和强度,提高手部的力量。
2. 弹簧器械训练。
可以使用一些弹簧器械来进行手部力量训练,例如手指夹、手腕器械等。
这些器械可以帮助守门员增强手部的力量和灵活性,提高他们的扑救能力。
3. 重物训练。
可以让守门员使用一些重物进行训练,例如哑铃、杠铃等。
通过举重训练来增强手部的力量,提高守门员的扑救能力。
三、手部灵活性训练。
除了力量训练,手部的灵活性也是非常重要的。
因为守门员需要有快速、准确的反应能力,而手部的灵活性可以帮助他们更好地做出反应。


文献综述研究课题:机器人足球决策系统研究组员(班级及学号):熊汇韬(3班10)罗运真(3班15)赵大帅(2班24)彭晗(2班23)唐昊(2班21)游斌(2班19)杨荃月(2班28)摘要机器人足球比赛是近年来在国际上迅速开展起来的国际对抗活动。
它是人工智能领域与机器人研究领域的基础研究课程,是一个极富挑战性的研究项目。
机器人足球比赛对研究多智能体的合作与竞争理论具有重要的实践与指导意义。
而在机器人足球比赛中, 决策系统根据视觉系统提供的机器人位姿和足球位置信息, 进行快速准确的决策, 是取得胜利的关键。
本文以机器人系统的核心子系统决策子系统的开发为背景,主要介绍ROBOCUP(机器人足球世界杯比赛)机器人足球赛仿真技术,关于机器人的基本动作、路径规划、决策能力的研究,研究行之有效的决策推理方法。
对目前决策系统问题主要是实时性、准确性、适应性和稳定性。
针对上述问题, 开发了面向RoboCup 小型组机器人足球比赛的决策系统, 重点解决了算法设计与系统特性之间的矛盾。
关键词:机器人足球; 可视化编程; 算法;决策;目录一. 介绍: (4)二. 系统分级 (6)1. 视觉子系统: (7)2. 决策子系统: (8)3. 通讯子系统: (9)决策六步经典方法推理模型 (9)三. 系统核心------决策模块 (10)1. 机器人足球比赛系统决策子系统的一般结构: (10)2. 产生式推理模型: (11)3. 决策编程的可视化 (12)4. 决策系统各模块分析 (13)预处理模块 (14)态势分析与策略选择模块 (14)队型确定与角色分配模块 (14)目标位置确定模块 (14)运动轨迹规划模块 (14)动作选择模块 (15)5. 决策系统各模块设计 (15)输入信息预处理模块 (15)态势分析与策略选择模块 (16)队型确定与角色分配模块 (16)目标位置确定模块 (17)运动轨迹规划模块 (18)动作选择模块 (19)四.决策层中KICK的智能算法 (20)1. 基于倒脚踢球策略的模糊逻辑算法 (20)2 .基于多次踢球策略的遗传算法 (21)五.机器人路径规划典型方法 (22)1. 栅格法: (22)2. 人工势场法: (24)六.论述 (25)七.总结: (26)参考文献 (27)一. 介绍:近年来,随着计算机技术的发展,分布式人工智能(Distributed Artificial Intelligence, DAI)已经成为人工智能领域的重要研究方向之一。

足球守门员的训练方法和技巧足球守门员的训练方法和技巧守门员是场上唯一受特殊规则约束的队员,他的职责非常明确而有限。
守门员的独特位置能够为球队的进攻和防守带来好处,因此守门员训练是球队日常训练的重要组成部分。
在比赛中相比防守,守门员会有更多的进攻动作,这点我们必须给予重视,并将这个认知融入比赛和训练理念中。
在非比赛状态时守门员可以重复训练防守射门和传中时的技术动作,从而更熟练、稳定地掌握这些动作。
除了防守动作,守门员还需要保证在整支球队身后有很好的位置感和传球能力,这些可以在和全队一起训练时练习,守门员也可以更好地融入训练中。
这非常重要,因为在非职业足球领域很少会有专职的守门员教练带领守门员训练。
1、反应能力:训练目标:反应速度训练说明:守门员站在门前,和教练(队员)相距5米传接低平球。
教练(队员)向球门的两个角传低平球,守门员尝试将球接住。
常见错误:传球球速太快、传球太频繁、反应速度慢。
人数要求:2名队员训练次数:10~15次2、拳头击球:训练目标:拳头击球训练说明:守门员尝试在有前锋干扰的情况下双拳将传中球击出。
常见错误:击球时机把握不准。
人数要求:3名队员训练次数:10~15次1、移动中接球:训练目标:向前移动中接球训练说明:守门员小碎步快速绕过标志锥,然后接前方射出的.低平球。
常见错误:身体协调性差。
人数要求:2名队员训练次数:10~15次2、沿三角形方向连续接球:训练目标:接地滚球训练说明:守门员沿三角形横向跨步移动,在三角形每条边外侧都有一名队员向其传低平球。
守门员用正确的技术动作接球,然后用地滚球的方式将球传给队友。
常见错误:身体协调性差。
人数要求:4名队员训练次数:10~15次1、接传中球:训练目标:接高空球训练说明:两名传中队员尝试向球门后门柱附近的前锋传高空球,传球需飞过小禁区上空。
守门员接住或击出所有在其控制范围内的传球。
常见错误:选择时机不对、过于犹豫。
人数要求:4名队员训练次数:10~15次2、接高空球:训练目标:接高空球训练说明:队员们依次在跑动中以较慢的球速瞄准横梁射门。

守门员技术守门员技术对于足球比赛的胜负结果起着至关重要的作用。
一位优秀的守门员不仅需要具备出色的身体素质和反应能力,还需要运用各种技术来有效地防守进攻方的射门。
本文将从守门员的基本动作、位置感、扑救技巧以及战术布置等多个方面来探讨守门员的技术。
首先,守门员的基本动作是他们能够完成各种技术动作的基础。
例如,稳定而平衡的站姿是守门员进行扑救的前提条件。
他们需要保持良好的身体平衡,以便能够快速地做出反应。
此外,守门员的跑动、起跳、传球等动作也需要具备高度的协调性和稳定性。
只有通过不断的训练和练习,守门员才能够将这些基本动作熟练运用在比赛中。
其次,守门员的位置感在比赛中起到了至关重要的作用。
他们需要时刻掌握球场上的位置关系,以便能够更好地判断进攻方的射门方向和力度。
在比赛中,守门员需要根据比赛形势和对手的动作来灵活调整自己的站位。
只有做到站在合适的位置上,守门员才能够更好地掌控球门。
位置感的培养需要守门员经验的积累和对比赛的深入理解。
扑救技巧是守门员技术中的关键部分。
守门员需要根据射门的速度、角度和力度来做出相应的扑救动作。
常见的扑救技巧包括用手扑球、用身体扑球和倒地扑球等。
在面对射门时,守门员需要快速做出反应,并做出正确的判断和决策。
他们需要准确地预判球的落点,以便能够尽可能地挡住对方的射门。
扑救技巧的练习需要守门员不断地与球员进行对抗训练,提高他们的反应速度和扑救能力。
最后,守门员的战术布置在比赛中起到了决定性的作用。
他们需要与队友密切配合,在守备端形成有力的防守体系。
守门员需要根据对手的进攻方式和比赛形势来调整自己的战术策略。
例如,在面对对手的定位球战术时,守门员需要及时向队友传达指令,并做好出击或示意队友的准备工作。
只有通过良好的战术布置,守门员才能更好地发挥自己的能力,有效地保护球门。
综上所述,守门员技术在足球比赛中起着至关重要的作用。
优秀的守门员需要具备出色的基本动作、良好的位置感、熟练的扑救技巧和合理的战术布置。
仿真机器人世界杯足球赛攻防战术的研究各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢RoboCup(RobotWorldCup),即机器人世界杯足球锦标赛。
它是国际上一项为提高相关领域的教育和研究水平而举行的大型比赛和学术活动,通过提供一个标准任务来促进分布式人工智能、智能机器人技术、及其相关领域的研究与发展。
训练和制造机器人进行足球赛,是当前人工智能和机器人领域的研究热点之一。
在比赛中,当确定了球队的阵型后,每个队员分配了相应的角色,开始讨论球队的整体和局部攻防战术。
全队进攻战术全队进攻战术是指比赛中一方获得球后,通过队员之间的传递配合达到射门的目的而采用的配合方法。
与局部进攻战术相比较,全队进攻战术的进攻面比较广,参加进攻和快速反击等。
主要有边路进攻,中路进攻,快速反击等。
1、边路进攻:利用球场两侧地区发起进攻的方法叫做边路进攻。
边路进攻是全队进攻战术的主要形式之一,其主要特点是有利于发挥进攻速度,打破对方防线制造缺口。
2、中路进攻:中路进攻是利用球场中间区域组织的进攻,这种进攻虽然能直接射门,但难度最大,因为中路防守最为严密,突前的攻击手必须是反应极其敏锐,意识强而且技术高,敢于冒险,速度快和善于路位策应的队员。
3、快速反击:比赛中当攻方进攻时,后卫线往往压至中场附近,防守人数也由于插上进攻和助攻而相对减少,此时抓住对方防区空隙比较大和回防较慢的机会,趁其失球发动快速反击,往往能取得良好的效果,快速反击是最有威胁的进攻手段,有效发动快速反击。
能有效得分,但其有一定的冒险性。
所以要掌握准确快速的原则。
配合要有组织性,要非常有默契,需要多次练习。
否则很难在比赛中实施。
全队防守战术防守战术可分为两种基本类型:盯人紧逼防守(人盯人防守),即在规定的范围内盯人紧逼,不交换看守:区域紧逼防守(盯人和区域相结合),即现今流行的综合防守,紧逼和保护相结合,在个人的防区内紧逼,作交替看守。
盯人防守即各自都有明确的防守对象。