基于HDevelop的形状匹配算法参数的优化研究
- 格式:pdf
- 大小:2.96 MB
- 文档页数:7
基于图像轮廓的匹配算法的研究与应用图像轮廓是图像中物体的边界线条,它包含了物体的形状和结构信息。
基于图像轮廓的匹配算法在计算机视觉领域有着广泛的研究和应用。
本文将探讨该算法的研究进展以及在实际应用中的一些应用案例。
首先,基于图像轮廓的匹配算法主要包括两个步骤:特征提取和匹配。
特征提取是指从图像中提取出轮廓特征,常用的方法有边缘检测算法(如Canny算法)和轮廓提取算法(如Sobel算法)。
匹配是指将提取到的轮廓特征与数据库中的轮廓进行比对,找到最佳匹配结果。
常用的匹配方法有欧氏距离匹配和形状上下文匹配等。
在研究方面,基于图像轮廓的匹配算法已经取得了一些重要的进展。
例如,研究人员提出了基于形状上下文的匹配算法,该算法可以在形状有较大变化的情况下也能进行准确的匹配。
此外,还有一些基于深度学习的图像轮廓匹配算法,通过使用深度神经网络对轮廓进行学习和提取,可以得到更加准确的匹配结果。
在应用方面,基于图像轮廓的匹配算法有着广泛的应用场景。
例如,在目标检测中,可以利用该算法对目标的轮廓进行匹配,从而实现目标的自动识别和定位。
此外,在工业领域中,可以利用该算法对产品的轮廓进行匹配,实现产品的质量检测和分类。
除此之外,基于图像轮廓的匹配算法还可以应用于图像检索、图像重建等领域。
例如,在图像检索中,可以利用该算法对图像库中的图像进行轮廓匹配,从而实现更加准确和高效的图像检索。
在图像重建中,可以利用该算法对缺失的轮廓进行补全,从而实现图像的完整重建。
综上所述,基于图像轮廓的匹配算法在计算机视觉领域具有重要的研究价值和广泛的应用前景。
虽然该算法在一些复杂场景下仍然存在一定的挑战,但通过不断的研究和改进,相信会有更多的突破和创新,进一步推动该算法在实际应用中的发展和应用。
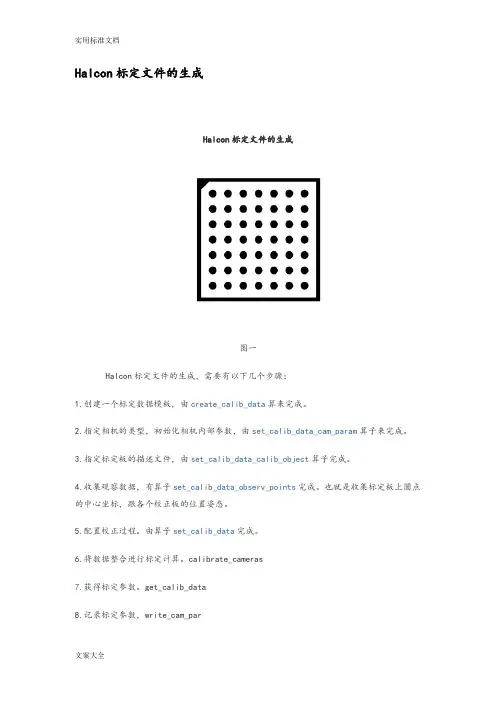
Halcon标定文件的生成Halcon标定文件的生成图一Halcon标定文件的生成,需要有以下几个步骤:1.创建一个标定数据模板,由create_calib_data算来完成。
2.指定相机的类型,初始化相机内部参数,由set_calib_data_cam_param算子来完成。
3.指定标定板的描述文件,由set_calib_data_calib_object算子完成。
4.收集观察数据,有算子set_calib_data_observ_points完成。
也就是收集标定板上圆点的中心坐标,跟各个校正板的位置姿态。
5.配置校正过程。
由算子set_calib_data完成。
6.将数据整合进行标定计算。
calibrate_cameras7.获得标定参数。
get_calib_data8.记录标定参数,write_cam_parStartCamPar :=[0.016, 0, 0.0000074, 0.0000074, 326, 247, 652,494]解释一下这个数组的意思。
面阵相机有14或18个参数(根据想相机的畸变模式),对于线阵相机有17个参数。
这些参数可以分开为内部相机参数、外部相机参数。
面阵相机(division模式):Focus(焦距):远焦镜头镜头焦距的长度Kappa:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高面阵相机(polynomia模式):Focus(焦距):远焦镜头镜头焦距的长度K1, K2, K3, P1,P2:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高线阵相机不做具体介绍Halcon标定板规格2011-12-23 12:56 68人阅读评论(1) 收藏举报图一:30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm 边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度: 46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度: 51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm 边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度: 56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm边角:由黑色外边框向内缩进一个中心边距的长度Halcon如何制作标定板分类:Halcon 2011-12-23 12:51 151人阅读评论(2) 收藏举报图1上图即为我自行制作的标定板的图样。
很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不岀时间。
去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。
德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。
HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。
下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。
1. Shape-Based matchi ng 的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。
基本流程是这样的,如下所示:⑴首先确定岀ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_recta ngle1()这个函数就会帮助你生成一个矩形,利用area_ce nter()找到这个矩形的中心;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI ;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。

基于图像处理的轮廓检测与形状匹配研究图像处理技术在现代科技领域得到广泛的应用,其中轮廓检测与形状匹配是一个非常重要的领域。
本文将介绍基于图像处理的轮廓检测与形状匹配研究。
一、轮廓检测的概念与意义轮廓检测是指从图像中提取物体边缘信息的过程。
在实际应用中,轮廓可以被用来进行目标识别、变形检测、轮廓描述、形状分析等一系列处理。
轮廓检测的目标是从原始图像中提取出物体的边缘信息,这种信息往往是对目标的一种特定表达方式,可以用于进行进一步的处理。
二、轮廓检测的方法轮廓检测的方法主要包括:边缘检测法、区域生长法、边缘追踪法等。
1.边缘检测法边缘检测法指的是利用像素灰度值的变化情况,对图像中的像素进行分类,从而发现物体对象的边缘所在位置。
其中,最常见的边缘检测算法是Sobel算法和Canny算法。
Sobel算法是利用局部灰度变化检测边缘的方法。
对于像素点P,Sobel算法先在邻域内提取出水平、垂直两个方向上的灰度梯度,再通过平方和开根号的方式得到梯度幅值G,从而判断此像素点是否为边界点。
Canny算法是一种广泛被使用的边缘检测算法。
它的特点是精度高、有很好的抗噪性和特定的提取目标等方面。
Canny算法的基本思想是在图像内用高斯滤波去噪,然后计算像素点灰度值的梯度,通过非极大值抑制优化边缘检测结果,在使用双阈值处理方法完成边缘处理。
2.区域生长法区域生长法是一种基于相邻像素之间灰度值差异性进行像素级别划分的方法。
区域生长算法的基本思路是从一个像素点出发,根据一定的约束条件,搜索周围像素是否符合条件,从而递推构建连通区域。
3.边缘追踪法边缘追踪法是指在处理过程中,边缘轮廓是通过沿边缘单元进行扫描建立的方法。
边缘追踪法包括正向追踪和反向追踪,对应的算法是单向链码和双向链码。
三、形状匹配的概念与意义形状匹配是指在对物体进行轮廓提取之后,通过对轮廓曲线的形状与另一个轮廓的比对,找到最佳匹配的过程。
形状匹配的目的是在一个图像数据库中,通过形状相似性进行搜索。
《机器视觉技术基础》教学教案第一章机器视觉概述教案课程名称机器视觉概述授课时长40min授课方式软件录屏演示、讲授法、总结归纳法、拓展延伸教学目的通过学习,让学生对机器视觉这项技术有一个基本的了解重点、难点了解机器视觉的工作原理以及硬件环境搭建。
教学内容教学过程与详细内容教学设计引入:机器视觉是一项综合技术,被广泛应用于现代化工业中,用机器视觉检测方法可以大大提高生产的效率和自动化程度。
本章就针对机器视觉的基本原理以及应用方向问题进行解释和说明。
讲授过程:1.对机器视觉进行初步认识,2.了解机器视觉的工作原理,一个完整的机器视觉系统由多个模块组成,普通包括光源、镜头、相机、图象采集模块、图象处理模块、交互界面等。
3.了解机器视觉硬件环境搭建。
1)机器视觉中光源的选型2)机器视觉相机的选型,3)机器视觉项目选型要关注的镜头参数:接口、最大靶面尺寸、物距与焦距、光圈、分辨率与成像质量、镜头倍率与视场范围。
4)图象采集卡的技术参数:图象传输格式、图象格式、传输通道数、分辨率、采样频率与传输速率。
了解图象采集卡的各种种类。
播放机器视觉相关视频,引入课题,激发学生学习兴趣详细讲解机器视觉的工作原理及应用4.机器视觉的应用与展望。
(1)在工业领域的应用(2)在医学领域的应用 (3)在交通领域的应用(4)在农业领域的应用(5)在生活领域的应用归纳、总结:本节课主要针对机器视觉的基本原理以及应用方向问题进行解释和说明。
结尾:鼓励学生课后复习。
总结、归纳机器视觉的工作原理及应用第二章数字图象基础教案微课名称数字图象基础微课时长授课方式软件录屏演示、讲授法、总结归纳法、拓展延伸教学目的对图象处理的一些基础内容进行简单介绍与了解。
重点、难点初步认识图象与数字图象并了解其分类,了解图象数字化的基本原理,认识图象灰度直方图,掌握图象像素间的关系。
教学内容教学过程与详细内容教学设计引入:学习机器视觉,其实质就是对各类图象的处理过程,数字图像处理技术在当今世界应用已经非常普遍,应用手段越来越丰富,功能也越来越强大。
基于HALCON的模板匹配方法总结分类:halcon学习2013-06-26 16:02 47人阅读评论(0) 收藏举报halcon形状匹配算法德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。
HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。
下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。
1. Shape-Based matching的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。
基本流程是这样的,如下所示:⑴首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用area_center()找到这个矩形的中心;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;⑶接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。
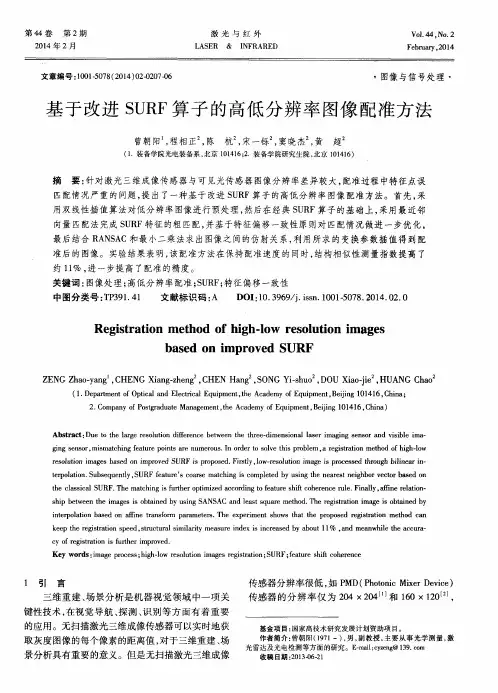
基于SURF的图像匹配算法改进顾大龙;曾峦;翟优【摘要】In image registration, the ratio of Euclidean distance from the closest neighbor to the second closest neighbor is used in SURF algorithm to find the matching point. When the matching threshold is very big, the method brings lots of mismatching points, which affect the accuracy of image mosaic. RANSAC is an effective method, which can eliminate the mismatching points, but it needs to make sure some parameters artificially.A method of multi-level image registration is put forward in this paper. It can not only eliminate the mismatching points, but also complete the image registration without participate of manual work. The experimental results prove the method of image registration can extract the matching point exactly, realize the image registration, and satisfy the need of image mosaic. It has a particular application value.%在图像匹配中,SURF算法采用最邻近与次邻近欧式距离比查寻匹配点,当阈值过大时,这种方法会产生大量误匹配点,从而严重影响图像配准的精度.RANSAC算法是一种有效剔除误匹配点的方法,但需要人工确定部分参数值.提出一种多层次图像匹配方法,不仅能够剔除误匹配点还可以无需人工参与完成图像匹配.实验表明,该匹配方法能够精确提取匹配点和实现自动匹配,很好地满足图像配准的要求,具有一定的应用价值.【期刊名称】《现代电子技术》【年(卷),期】2012(035)014【总页数】4页(P79-82)【关键词】SURF;欧式距离;图像配准;自动匹配【作者】顾大龙;曾峦;翟优【作者单位】装备学院研究生管理大队,北京101416;装备学院国防重点实验室,北京101416;装备学院研究生管理大队,北京101416【正文语种】中文【中图分类】TN919-340 引言现今比较流行的特征点匹配算法主要是SIFT算法[1]和SURF算法[2],SIFT算法是由Lowe提出的,由于其良好的性能而被广泛的使用,但是SIFT算法过于复杂,需要大量的计算时间,同时描述符维数过高,增加了匹配算法的复杂度,因此很难满足对实时性要求很高的场合。
基于改进SURF的增强现实图像匹配方法
贾一鑫;邓魏永;殷强;毋涛
【期刊名称】《计算机技术与发展》
【年(卷),期】2024(34)1
【摘要】针对传统增强现实图像匹配算法鲁棒性不强且效率不高的问题,提出一种改进的SURF匹配算法。
首先,使用SURF算法进行特征点检测,并通过Haar小波模板确定特征主方向,在得到特征主方向后构建特征描述符;由于传统SURF算法采用高达64维的矩形描述符,导致算法的计算量非常大,并且鲁棒性不强。
因此,该文使用DAISY圆形描述符替代原始算法中的矩形描述符,DAISY是三层同心圆结构,每层包含8个采样点,可以得到25个维度的描述符,这种结构使得算法的鲁棒性大大增强并且降低了计算复杂度;接着,使用特征描述符计算欧氏距离进行特征点匹配;最后,对得到的匹配点集使用随机抽样一致(RANSAC)与三角不规则网络(TIN)算法进行优化,剔除误匹配点。
实验结果表明,该算法虽然略微增加了时间复杂度,但鲁棒性变得更强,并且算法的效率和匹配精度也大大提高,平均精度达到了95%以上。
【总页数】6页(P59-64)
【作者】贾一鑫;邓魏永;殷强;毋涛
【作者单位】西安工程大学计算机科学学院;华宇铮蓥集团;中国纺织工业联合会【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于改进的SURF的图像匹配查重算法
2.基于改进SURF的快速图像匹配算法
3.基于ROI提取和改进SURF算法的图像匹配方法研究
4.基于改进SURF的图像匹配算法
5.基于改进SURF特征点的图像匹配方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于量子遗传算法的成品门幅模型参数优化设计郜琳琳;金福江;吴温龙【摘要】In order to solve the key technical problem regarding to the difficulty to design the parameters affecting the finished fabric width quantitatively in heat setting process, this paper puts forward the Quantum Genetic Algorithm (Quantum Genetic Algorithm, QGA) that is used to finish the process parameters optimization design of the product door model. First, we establish the optimization model, and then use quantum genetic algorithm based on this model to realize precise and quantitative design of parameters affecting the finished width. We process the elastic cloth by using the process parameters which are obtained by the method in the paper. The deviation in weight, width between the product, and user required index is less than 0. 1% , which can meet the actual production requirements fully. At the same time in the paper we can know that quantum genetic algorithm is better than genetic algorithm in optimum design of process parameters in comparison when the iterative population increase gradually.%为了解决热定型中影响成品织物门幅的工艺参数难以定量设计的关键技术难题.提出了将量子遗传算法用于成品门幅模型工艺参数优化设计中.建立优化模型,基于该模型采用量子遗传算法,实现了影响成品门幅的工艺参数精确定量设计.用该方法得到的工艺参数加工弹力布,生产成品的门幅与用户要求指标的偏差小于0.1%,完全满足实际生产要求.同时将量子遗传算法与遗传算法在工艺参数的优化设计中进行比较,得出当迭代种群逐渐增大时,量子遗传算法在工艺参数的优化设计中的优势更加明显.【期刊名称】《江南大学学报(自然科学版)》【年(卷),期】2012(011)004【总页数】5页(P432-436)【关键词】量子遗传算法;成品门幅模型;工艺参数优化设计;遗传算法【作者】郜琳琳;金福江;吴温龙【作者单位】华侨大学信息科学与工程学院,福建厦门361021;华侨大学信息科学与工程学院,福建厦门361021;东北大学信息科学与工程学院,辽宁沈阳110819【正文语种】中文【中图分类】TS115.1在纺织染整生产过程中,胚布经过染后热定型[1]得到成品织物。
HALCON形状匹配讲解楼主#更多只看楼主倒序阅读发布于:2013-07-21 22:29保存该帖是加密帖,需要10金币及以上的积分才能浏览以下内容:很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不出时间。
去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。
德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。
HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。
下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。
1. Shape-Based matching的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。