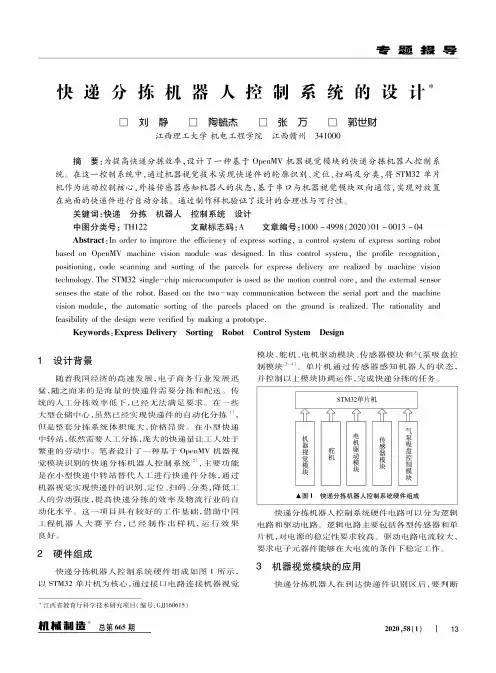
智能分拣机器人系统设计的流程原理图
- 格式:docx
- 大小:73.45 KB
- 文档页数:1
![毕业设计(论文)-基于机器人货物分拣系统设计[管理资料]](https://uimg.taocdn.com/8d4cc7bffe4733687f21aa46.webp)
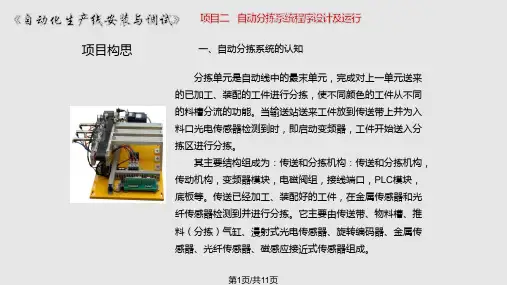
安徽工商职业学院应用工程学院毕业设计题目:基于机器人货物分拣系统设计系别:应用工程学院专业:机电一体化班级:15机电2班姓名:学号:指导教师:日期:目录摘要 (4)第1章引言 (4)、现状及应用 (4) (5) (6) (7)第2章基于机器人货物分拣系统设计 (7) (7) (7) (8) (8) (9) (9) (9) (9) (10) (11) (11) (11) (12) (12)第3章设备的控制系统程序编写 (12) (12)TIA Portal软件的使用 (13),插入并组态PLC (13) (14) (15) (15) (16) (18) (20)X_SIGHT软件程序的编写 (20) (22) (23) (23) (27)第4章触摸屏设计 (29)第5章总结 (31) (31) (31) (31)摘要当代科学技术发展的特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。
现代机器人都是由机械发展而来。
与传统的机器的区别在于,机器人有计算机控制系统,因而有一定的智能,人类可以编制动作程序,使它们完成各种不同的动作。
随着计算机技术和智能技术的发展,极大地促进了机器人研究水平的提高。
现在机器人已成为一个庞大的家族,科学家们为了满足不同用途和不同环境下作业的需要,把机器人设计成不同的结构和外形,以便让他们在特殊条件下出色地完成任务。
机器人成了人类最忠实可靠的朋友,在生产建设和科研工作中发挥着越来越大的作用。
搬运机器人不但能够代替人的某些功能,有时还能超过人的体力能力。
可以24小时甚至更长时间连续重复运转,还可以承受各种恶劣环境。
当机器人一点与其他传感器结合到一起后,它也不再是简简单单的机器设备了,比如与视觉搭配起来过后它就能实现和人一样的分辨物体、、、、、、、为了避免危险恶劣的工作环境导致的工伤事故和职业病,保护工人的身心安全,对一些特殊工种,工作量大、环境恶劣、危险性高、人类无法涉足的工作领域都可由工业机器人代替。
图书智能分拣机器人的应用设计摘要:图书分拣机器人大多数只是负责书本的运输和归类,无法实现整理与排放。
图书智能分拣机器人实现了图书快速整理归位,其工作原理为:图像识别模块扫描图书的电子标签,识别出图书种类,通过无线传输模块传输给中控,控制机械臂完成图书的抓取动作,并规划智能机器人的行进路径,机器人在行进过程中通过红外线扫描路径标识,并利用超声波测距进行避障,最后将图书放入书架的指定位置,实现图书馆还书归位的智能化处理。
关键词:智能化;数据化;图像识别;机械臂控制系统0 引言舒适的阅读环境、丰富的馆藏文献、便捷的借阅条件极大地刺激着读者的阅读需求,近些年许多图书馆的借阅量和还书量屡创新高,同时给图书馆管理带来了极大挑战,而架位管理的基础就是图书分拣。
目前国内图书馆大多依靠人工完成,分拣任务繁重且含金量不高、时效性差,无法满足图书快速流转的需求,从而在日益增长的借阅需求与图书馆设施之间产生新的矛盾。
为了缓解这种矛盾,图书馆开始探索智能机器人分拣技术,以此来解决图书快速分拣与缩短流转时效的难题。
1 图书智能分拣机器人的内涵图书智能分拣机器人是及收集、分拣和运送于一体的精准化机器,图像识别模块扫描图书的电子二维码标签,并将信息传输至中控单片机进行分析,识别出图书种类与书架位置,然后通过无线传输模块传给控制单片机,控制机械臂完成图书的抓取动作,并规划分拣机器人的行进路径,发送行进指令,分拣机器人在行进过程中通过超声波扫描路径成像和测距进行避障,将图书放入书架的指定位置,最后原路返回。
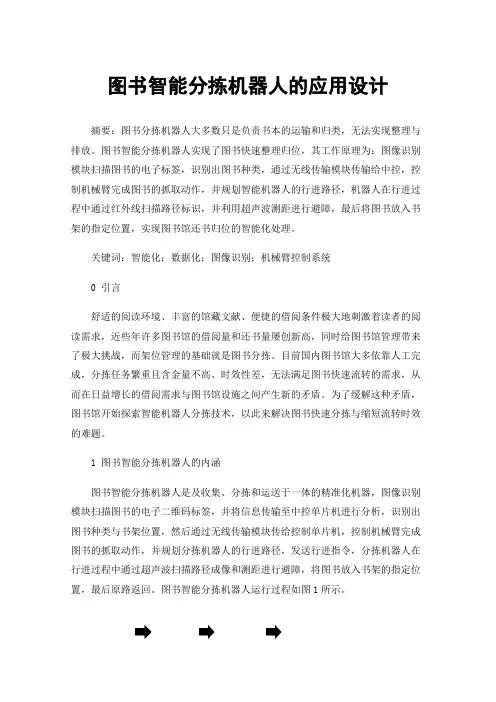
图书智能分拣机器人运行过程如图1所示。
图1 图书智能分拣机器人的运行流程2 图书分拣机器人的功能模块2.1 图像采集模块2.1.1 图像识别功能图像识别模块包括图像处理[[1]]装置和二维码识别装置。
二维码识别装置用于接收所述图像识别[[2]]模块采集的书本信息以及所述第一标识号,确定所述书本信息中的关键字符。
通过传感器,识别书本的形状、颜色、大小等特征,传输给单片机控制系统,系统利用普适性极高的二维码识别技术,利用扫描技术和PC技术[[3]]组合形成的电子识别技术,具有识别快、成本低、存储量大等特点。
基于AI技术的智能分拣系统设计随着物流业务的不断发展和扩张,快递分拣成为了一个极具挑战的领域。
因此,各运营商都致力于提高分拣的效率和准确性。
在这个领域中,人工分拣已经开始转变为自动化智能分拣。
而这一转变得益于AI技术的运用。
AI技术在智能分拣领域的运用,与生产线自动化有着类似的原理,即设备根据预设参数、系统反馈的数据,自动完成操作。
智能分拣系统主要由物料传输设备、扫描设备、智能算法、机械臂等组成。
整体系统流程大致如下:一、物料传输设备:将需要分拣的物料送至下一个设备。
常见的物料传输设备有传送带、滚筒等。
物料传输设备应当拥有良好的传送能力,物料送至下一个设备的过程中应不产生堵塞情况。
二、扫描设备:主要用来扫描物料的标签或二维码,获取运单等信息。
这些信息将用来判断物料的去向。
当前,扫描设备常见的有激光扫描和CCD线扫描两种技术。
相比之下,CCD线扫描技术成本低、性能稳定、易于集成。
三、智能算法:AI技术的运用使得智能算法得到了广泛的运用。
智能算法为系统提供了大量的数据,进行模型训练、建模和实时计算。
通常采用的有神经网络、卷积神经网络、决策树等技术。
智能算法的关键就在于如何预测物料的去向,从而进行正确的分拣处理。
四、机械臂:智能算法预测出物料的去向后,机械臂将完成相应的操作。
机械臂是智能分拣系统的关键。
它需要具备良好的机械结构和精准运动技术。
在挑选机械臂时,需要考虑到运动轨迹、负重能力、准确度等多方面因素。
综合上述几个方面的内容,一个智能分拣系统也就被完整设计出来了。
需要指出的是智能分拣系统的算法设计则是最具挑战性的组成部分。
系统的电子技术、机械设计等部分相对更容易实现。
因此,系统设计者需要对AI技术有长期而全面的认识,以适应未来物流领域快速发展的需求。
总的来说,AI技术不断探索,不断突破,取得了许多卓越的成果,其中应用于智能分拣系统,准确的提高了分拣效率,保证了快递的快速和准确的投递,极大的减少了人力资本,也是物流发展中的重要步伐。
物流分拣机器人原理
物流分拣机器人是一种用于自动化分拣、搬运和运输货物的机器人系统。
其原理是基于视觉识别技术、路径规划算法和机器人控制系统的结合。
首先,物流分拣机器人通过搭载视觉传感器或相机来获取货物的图像信息。
这些传感器能够准确地识别商品的特征和位置,例如条形码、二维码或货物特定的标识。
通过图像处理和模式识别算法,机器人能够自动识别和分类不同的货物。
然后,机器人利用路径规划算法来确定最优的路径,以便在仓库或物流中心内高效地移动。
这些算法通常会综合考虑货物的优先级、路径的长度、障碍物的位置和其他实时信息,以确保机器人能够以最短的时间完成任务。
在移动过程中,物流分拣机器人还可以与其他设备或系统进行实时通信,例如与货架机械臂、搬运车或仓库管理系统进行数据交互。
这种通信能够使机器人在执行任务时更加智能化和协调化,以及自动调整和优化操作。
最后,物流分拣机器人利用机器人控制系统实时控制机器人的运动和操作。
这个系统通常会包括机器人的运动控制器、电源管理和安全监测装置。
这样,机器人就能够安全、可靠地执行分拣和搬运任务,同时保护自身和周围的环境。
综上所述,物流分拣机器人的原理是通过视觉识别技术、路径规划算法和机器人控制系统的结合,实现对货物的识别、分类
和自动化搬运。
这种机器人系统在物流行业中广泛应用,可以提高分拣效率、降低运营成本,并增强整体的物流管理能力。
word毕业设计〔论文〕题目PLC编程在流水线生产中自动分拣控制系统中的运用研究学生吴佳鹏学号2015309435专业发电厂与电力系统班级20153094指导教师爽爽评阅教师爽爽完成日期2017年9月25日三峡电力职业学院毕业设计〔论文〕课题任务书〔2017-2018学年〕目录摘要- 1 -前言- 2 -1、PLC的开展与定义- 2 -- 2 -- 3 -- 3 -2、PLC的特点与应用- 4 -2.1 PLC的特点- 4 -- 5 -- 5 -3、PLC的结构与编程语言- 5 -3.1 PLC的硬件结构- 5 -3.2 PLC的等效电路- 5 -3.3 PLC常见的编程语言- 6 -4、自动分拣控制的要求与流程- 6 -- 6 -- 6 -- 7 -- 7 -5、I/O分配表- 7 -6、梯形图- 8 -7、指令表- 11 -致- 12 -附录一- 13 -参考文献- 15 -PLC编程在流水线生产中自动分拣控制的运用研究---PLC编程在升降机控制运用学生:吴佳鹏指导教师:爽爽教师〔三峡电力职业学院〕摘要:为降低物流行业中自动分拣系统的能耗,以与实现分拣系统准确的位移控制,将PLC 技术应用到分拣系统中。
在对自动分拣系统的模型机进展功能分解的根底上,采用PLC 并结合变频器,实现了对自动分拣系统包括上料、皮带输送、机械手搬运和分类仓更大大降低了能耗;同时,能储等功能的自动控制。
研究结果明确:使用PLC 带动变频器不仅能方便地控制分拣系统电机的启停,够准确控制机械手动作时间和步进电机传动产生的位移。
关键词:PLC ;自动分拣系统;自动控制;变频器中图分类号:TP278;TH39 Abstract:in order to reduce the energy consumption of the automatic sorting system in the logistics industry and realize the accurate displacement control of the sorting system, the PLC technology is applied to the sorting system. Based on functional deposition in the model machine of automatic sorting system, the bination of PLC and frequency converter, the realization of automatic sorting system includes feeding, belt conveyor, manipulator handling and sorting bin also greatly reduce the energy consumption; at the same time, can automatically control the storage function. The results show that using PLC to drive the inverter can not only conveniently control the start and stop of the motor of the sorting system, but also control the movement time of the manipulator and the displacement generated by the stepper motor accurately.Key words:PLC; automatic sorting system; automatic control; frequency converter classification number: TP278; TH39前言——随着社会对物流服务的需求日益增长,分拣作为物流作业中的一个重要环节越来越受到人们的重视。

分拣机器人工作原理分拣机器人是一种能够自动进行物品分类和分拣的智能设备,它在现代物流行业中发挥着越来越重要的作用。
分拣机器人能够快速、准确地完成大量货物的分类和分拣工作,极大地提高了物流效率和准确性。
那么,分拣机器人是如何工作的呢?下面我们就来详细介绍一下分拣机器人的工作原理。
首先,分拣机器人通过激光或摄像头等传感器设备对货物进行扫描和识别。
当货物进入分拣机器人的工作区域时,传感器会立即对货物进行扫描,获取货物的相关信息,如尺寸、重量、形状等。
通过这些信息,分拣机器人能够准确地识别货物的种类和属性。
接下来,分拣机器人会根据预先设定的分拣规则和算法对货物进行分类。
在货物被识别后,分拣机器人会根据预先设定的分拣规则,将货物分类放置到相应的货位或容器中。
这些分拣规则和算法可以根据实际需求进行调整和优化,以确保分拣机器人能够快速、准确地完成分拣任务。
除此之外,分拣机器人通常配备有机械臂或夹爪装置,用于抓取和移动货物。
一旦货物被正确分类,分拣机器人会利用机械臂或夹爪装置将货物移动到相应的位置。
这些机械臂和夹爪装置能够根据不同的货物特性进行灵活调整,确保货物能够被准确、稳定地移动和放置。
此外,分拣机器人还配备有自动导航系统,能够自主规划最优路径和避开障碍物。
在进行分拣任务时,分拣机器人会通过自动导航系统规划最短、最快的分拣路径,以提高分拣效率。
同时,自动导航系统还能够及时发现并避开工作区域中的障碍物,确保分拣过程的安全和稳定。
总的来说,分拣机器人的工作原理主要包括传感器识别、分拣规则分类、机械臂移动和自动导航等环节。
通过这些环节的协同作用,分拣机器人能够快速、准确地完成物品的分类和分拣工作,为现代物流行业的发展提供了重要支持。
随着人工智能和机器人技术的不断进步,分拣机器人的应用范围和效率将会进一步提升,为物流行业带来更多的便利和效益。
以上就是关于分拣机器人工作原理的介绍,希望能够对大家有所帮助。
分拣机器人作为现代物流行业的重要装备,其工作原理的了解对于提高物流效率和准确性具有重要意义。
智能快递分拣系统设计随着电子商务的快速发展,快递业务也变得日益繁忙。
为了提高快递分拣的效率和准确性,智能快递分拣系统应运而生。
该系统利用先进的技术和智能算法,能够实现快递分拣的自动化和智能化,大大提高了快递行业的效率和服务质量。
本文将详细介绍智能快递分拣系统的设计原理和关键技术。
一、系统整体架构智能快递分拣系统由物流仓储区、传送设备、识别装置、控制系统和数据管理系统组成。
物流仓储区是存放快递包裹的地方,传送设备主要包括输送线、滚筒等,用于将包裹从仓储区输送到分拣区。
识别装置则是利用图像识别、RFID技术或者激光扫描等方式,对包裹进行识别和分类。
控制系统则是负责协调各个部件的工作,实现系统的自动化运行。
数据管理系统则是用于管理包裹信息、路由信息等数据,为系统提供支持。
二、识别装置的设计快递分拣系统的核心是识别装置,其准确性和稳定性对于整个系统的运行至关重要。
目前主流的识别装置有图像识别系统和RFID技术。
图像识别系统利用摄像头和图像处理算法,对包裹进行拍照并进行识别和分类。
这种方式成本较低,易于实现,但受到光线、角度等因素的影响,容易出现识别错误。
而RFID技术则是将RFID芯片嵌入包裹中,通过读卡器对芯片进行读取,实现包裹的快速识别和分类。
这种方式准确率较高,但需要大量的RFID标签和读卡器,成本较高。
在实际应用中,可以根据需求进行选择,也可以采用两种方式的结合,提高识别装置的准确性和稳定性。
三、控制系统的设计控制系统是智能快递分拣系统的大脑,其设计优劣将直接影响系统的稳定性和效率。
控制系统应具有自动化、智能化和灵活性的特点,能够实现包裹的自动分类、路由和投递。
控制系统还应具有故障自诊断和自修复的功能,能够及时发现和处理系统故障,确保系统的持续稳定运行。
控制系统还应具有良好的人机交互界面,方便操作人员进行监控和管理。
在控制系统的设计中,可以采用工业控制系统的成熟技术,也可以引入人工智能和大数据技术,以提高系统的智能化和自适应性。