一种波浪能实验装置水动力学分析与优化设计_盛松伟
- 格式:pdf
- 大小:312.89 KB
- 文档页数:6

一种新型六自由度波浪能装置的水动力学分析纪志飞;林敏;何宏舟;杨绍辉【摘要】浮子的能量收集效率对于装置发电效率的提升具有重要作用.针对传统浮子式装置仅具有一个自由度的问题,提出了一种新型六自由度波浪能装置.基于线性波理论和MMG(Ship Manoeuvring Mathematical Model Group)方法,建立了新型装置的水动力学模型.分析了此装置的浮子在线性波浪作用下的位移和速度.结果表明:新型六自由度装置可以同时收集浮子六自由度方向的动能,具有较高的波浪能收集效率.另外,浮子在垂荡方向上的动能远大于横荡、纵荡方向上的动能.分析了波浪能收集效率随波浪遭遇角与弹簧系数之间的变化规律,文中工作为新型波浪能装置的优化设计提供了有益参考.【期刊名称】《海洋技术》【年(卷),期】2017(036)004【总页数】7页(P7-13)【关键词】波浪能装置;水动力学;MMG;能量采集效率【作者】纪志飞;林敏;何宏舟;杨绍辉【作者单位】集美大学机械与能源工程学院,福建厦门361021;福建省能源清洁利用与开发重点实验室,福建厦门361021;福建省清洁燃烧与能源高效利用工程技术研究中心,福建厦门361021;集美大学机械与能源工程学院,福建厦门361021;集美大学机械与能源工程学院,福建厦门361021;福建省能源清洁利用与开发重点实验室,福建厦门361021;福建省清洁燃烧与能源高效利用工程技术研究中心,福建厦门361021;集美大学机械与能源工程学院,福建厦门361021;福建省能源清洁利用与开发重点实验室,福建厦门361021;福建省清洁燃烧与能源高效利用工程技术研究中心,福建厦门361021【正文语种】中文【中图分类】P743.2随着经济与科技的发展,人们对能源的需求与日剧增。
同时,煤、石油、天然气等非再生能源已日渐枯竭,并且对这些能源的过度使用带来的环境污染问题也日趋严重。
因此,对新能源的研究、开发及应用已迫在眉睫。
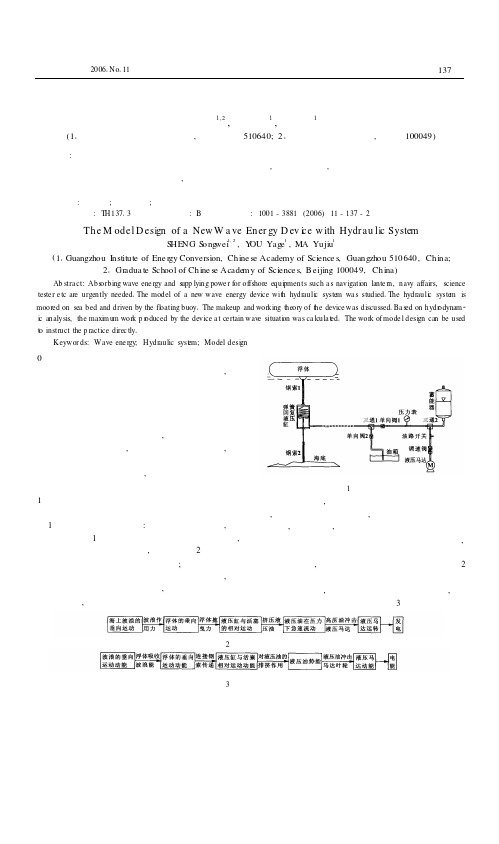
一种新型海上液压发电装置实验模型的设计盛松伟1,2,游亚戈1,马玉久1(11中国科学院广州能源研究所,广东广州510640;21中国科学院研究生院,北京100049)摘要:提取海洋波浪能为海上设备提供电力是当前可再生能源领域海洋能方向的一个研究热点。
本文提出了一种利用下端系泊于海底、上端悬挂于浮体的液压系统来吸收波浪能的方法,为探讨该方法,本文对其实验装置模型进行了设计和受力分析。
通过受力分析和水动力学计算,求出了液压系统在特定波况和最优外部阻尼下做功的最大值。
模型设计工作为进一步进行实体设计和实海况实验积累了经验。
关键词:波浪能;液压系统;模型设计中图分类号:T H13713 文献标识码:B 文章编号:1001-3881(2006)11-137-2The M odel D esign of a New W a ve Ener gy D ev i c e w ith Hydrau lic SystemS HENG S ong wei1,2,Y OU Yage1,MA Yujiu1(11Guangzhou I nstitute of Ene r gy Conversion,Chine se Academy of Science s,Guangzhou510640,China;21Gr adua te School of Chine se Acade m y of Science s,B eijing100049,China) Ab stra ct:Abs orbing wave ene rgy and s upp lying powe r for offshore equi pments such a s navigati on lante rn,nav y affairs,science teste r e tc are urgently needed1The model of a new wave energy device wit h hydrauli c syste m wa s studied1T he hydrauli c syste m is moored on sea bed and driven by the fl oating buoy1The makeup and working t heory of t he device was discussed1Ba s ed on hydr odynam2 i c analysis,the maxi m u m work p r oduced by the device a t ce rtain wav e situati on wa s ca lcula t ed1The work of mode l desi gn can be used t o instruct the p ractice direc tly1Keywor ds:Wave ene rgy;Hydraulic syst em;Model desi gn0 引言海洋波浪能是一种清洁无污染的可再生能源,成功且高效率的利用波浪能为船舶导航、为海上科研做定点标记和为海上军事设施提供电力是当前各国开发小型波浪能装置的主要目的。
文章编号:1005-9865(2006)03-0107-06一种波浪能实验装置水动力学分析与优化设计盛松伟1,2,游亚戈1,马玉久1(1.中国科学院广州能源研究所,广东广州 510640;2.中国科学院研究生院,北京 100049)摘 要:将造波水槽内二维浮体牵引弹簧回复液压缸的受力系统简化为弹簧—质量—阻尼器系统,建立数学模型,并根据牛顿第二定律得到运动方程式。
采用基于简单格林函数的边界元方法对所研究浮体的水动力学系数和波浪力进行计算,对于施加给液压系统的不同外部阻尼值,由运动方程可得到相应的浮体垂荡运动位移。
为求浮体对液压系统做功的最大值,在给定条件下着重对外部阻尼系数进行了优化。
关键词:二维浮体;边界元;外部阻尼;优化设计;波浪能中图分类号:P743.2 文献标识码:AHydrodynamic analysis and optimal design of a wave energy deviceSHENG Song -wei 1,2,YOU Ya -ge 1,MA Yu -jiu 1(1.Guan gzhou Institute of Energy Conversion ,Chinese Academy of Sciences ,Guangzhou 510640,China ;2.Graduate School of Chinese A -cademy of Sciences ,Beijin g 100049,China )A bstract :The model of a kind of wave energy device moored on seabed is simplified into a spring -mass -damping system ,and then its motion equation is built accordin g to Newton 's second law .Boundary element method based on simple Green function is presented to analyze the verti -cal motion of the buoy that drives a hydraulic pressure device below .Opti mal des ign of external -damping coefficient for attaining the maximum work produced by the buoy is discussed in detail .The res ult of the opti mal design can be used to guide the practical work directly .Key words :t wo -dimensional buoy ;boundary element method ;out -damping ;optimal design ;wave energy收稿日期:2005-06-22基金项目:广东省自然科学基金资助项目(05000727)作者简介:盛松伟(1972-),男,河南漯河人,硕士生,主要从事海洋波浪理论与技术研究。
成功且高效地利用海洋波浪能是当前各国开发海洋波浪能的重要内容之一。
现拟设计一种系泊于海底的波浪能装置,在海面放置一浮体,其下端通过钢索与一倒立的弹簧回复液压缸底部连接,液压缸内的活塞杆伸向下端,与锚固于海底的钢索连接。
静水时上下两段钢索都刚好伸直;来浪时浮子在波浪作用下产生运动将牵引液压缸做功,做功的形式可以是蓄能、发电、牵引运动机构等。
对实验室造波水槽内该模型系统进行了受力分析并建立数学模型,进行水动力学计算,为求浮体对液压系统做功的最大值,着重对外部阻尼系数进行了优化。
系统受力计算和外部阻尼系数优化的基础是对浮体的水动力学分析。
自上世纪50年代开始,许多学者对波浪与浮式结构物的相互作用问题进行了大量的研究[1~4]。
采用的研究方法大致上可以分为3大类:理论分析法、数值模拟和实验研究。
20世纪70年代以前,主要采用理论方法,如应用特征函数展开法和多极子技术等研究简单形状的结构物与正向波浪的相互作用[5~7]。
随着计算机技术和数值求解技术的发展,有限元和边界元方法在波浪与海洋结构物相互作用的计算中得到了较广泛的应用。
本文采用基于简单格林函数的边界元法来求解浮体的水动力学系数和所受的波浪力。
第24卷第3期2006年8月海洋工程THE OCE AN ENGINEERING Vol .24No .3Aug .20061 问题描述实验室造波水槽内的模型系统截面如图1所示。
浮体下端通过钢丝绳与弹簧回复液压缸底部相连,液压缸倒立,位于其下端的活塞杆与固定于造波水槽底部的钢丝绳相连。
液压缸体积与浮子体积相比可以忽略。
浮子横截面为半圆形,浮子长度和水槽宽度接近相等,因此可被看作二维浮体。
浮子下挂机构(钢索和弹簧回复液压缸)以体积小、重量轻为原则进行设计、选型,以便较准确的简化系统并建立数学模型。
在静水中时,上下两段钢丝绳伸直,整个系统构件都处于静止状态。
造波后,浮体带动液压缸体与缸体内活塞杆作相对运动,排挤缸体内具有一定压力水头的液压油做功,压力水头的高度是可调的。
在浮子的一个运动周期内,只有其从静水面向上运动时才对液压系统做功,所以浮子一个运动周期内做的功是外部阻尼力与浮体带恒定负载时运动振幅的乘积,即:W =F b X(1)式中:F b 表示外部阻尼力,即浮体对液压缸的牵引力;X 表示浮体带恒定负载时的运动振幅。
为便于分析整个系统,求解牵引力F b 和运动振幅X ,需合理简化系统然后建立易解的数学模型。
在静水中时浮体浮力平衡了整个系统所受的重力。
除去这一对平衡力,整个模型系统可简化为一个弹簧-质量-阻尼器系统[8],如图2所示。
在该系统中,有三个力作用在质量上:弹簧力、阻尼力和波浪力。
质量的位移是从静平衡位置开始,由牛顿第二运动定律,可得到下面运动方程式M ¨x =∑F =T -(k +k ′)x -(b +b ′)﹒x(2)式中:M 是浮体质量,T 是垂向波浪力,k 是外部弹簧系数,k ′是波浪引起的弹簧系数,b 是外部阻尼系数,b ′是波浪引起的阻尼系数,x 是浮体在恒定载荷下的垂荡运动位移,x =X e -i ωt 。
在上述系统中弹簧是储能元件。
高压水头对应于外部阻尼系数,改变液压油水头高度等于改变外部阻尼系数,外部阻尼系数不同,浮体所受的阻尼力不同,对应的垂荡位移不同,做功大小也不同。
为了求解浮体在何种外部阻尼下做功最大,需要在一系列外部阻尼系数b 下求解方程(2)中的位移量x ,方程中M 是常数;k 值很小,可忽略;求解二维浮体在造波水槽中作垂荡运动的水动力学系数和受到的波浪力T 成为解决整个问题的关键。
图2 系统受力分析图Fig .2 Scheme of forceanalysis图1 系统截面示意Fig .1 Scheme of system 2 理论分析2.1 分析方法采用基于简单格林函数的边界元法来研究二维浮体的水动力学系数和所受的波浪力。
这里考虑海域中,漂浮在自由面或淹没在流体中的任意形状柱型结构物(视作刚体)与正向线性入射波的相互作用问题,包括绕射和辐射问题,如图3。
其中辐射运动又分垂荡(heave )、横荡(swa y )和横摇(roll )三种运动模式,这里只考虑垂荡。
坐标系oxyz 为右手坐标系,其原点定义在静水面上,z 轴垂直向上为正,x 轴向右为正。
浮体在y 方向足够长。
108海 洋 工 程第24卷图3 正向波与浮体结构物Fig .3 Scheme of geometry 假定流体不可压,流动无旋且浮体在波浪作用下作周期性的微幅运动,则流体状态可用速度势 (x ,y ,z ,t )=Re [Υ(x ,y ,z )e -i ωt ]进行描述,其中Re []表示取复数表达式的实部,ω为圆频率,t 为时间,i =-1,Υ为与时间无关的空间复速度势,满足三维拉普拉斯方程2Υ x 2+ 2Υ y 2+ 2Υ z 2=0(3) 由于假定浮体在y 方向足够长,因此可以认为正向波在y 方向无变化,即有Υ(x ,y ,z )=φ(x ,z )(4) 这种假定被许多学者用于正向波与二维浮体的相互作用研究,将式(4)代入式(3)得:2φ x 2+ 2φ z 2=0(5)即为待求解的基本控制方程。
对于线性波,φ可分解为φ=φI +φD +φ(1)R(6)式中:φI 、φD 和φ(1)R 分别为与时间和y 无关的入射波速度势、绕射势和浮体做垂荡运动产生的辐射势,它们均满足式(5)。
由于φI 是预先给定的,因此求解φ,也就是求解φD 和φ(1)R 。
对在水深为h 1的水域中传播的振幅为A ,圆频率为ω的正向入射波,其复速度势φI 为φI =-i gA ωcosh [k (z +h 1)]cosh (kh 1)exp (i kx )(7)式中:g 为重力加速度;k 为波数,由色散关系k tanh (kh 1)=ω2/g 确定。
要得到式(5)的唯一解,还必须给定适当的边界条件,这些边界条件为在自由面边界S F 上: φ z -ω2g φ=0(8)在海底边界S B 上: φ n =0(9)在开边界S ±∝上: lim x ※±∝ φ x i k φ=0(10)在物面边界S 0上: φ n=V n (11)式中:V n 为物面法向速度。
对绕射问题有V n =- φI n;对辐射问题有V n =-i ωA (L )R n L ,A (L )R 为浮体做L 模式运动的复振幅,n L 为结构物表面的广义法向矢量(指向浮体内部)的分量,n 1=n z ,n 2=n x ,n 3=(z -z 0)n x -(x -x 0)n z ;n x 和n z 分别为浮体表面的单位内法向矢量在x 和z 方向的分量,(x 0,z 0)为选取的旋转中心坐标。
对于前面给出的基本控制方程和边界条件,可以采用不同的数值方法进行求解,这里采用边界元法。
利用格林公式,可以很容易地导出式(5)对应的边界积分方程为C (q )φ(q )+∫S φ(p ) G (p ,q ) n d s -∫S G (p ,q ) φ(p ) n d s =0(12a )和内点积分方程为φ(l )+∫S φ(p ) G (p ,l ) n d s -∫S G (p ,l ) φ(p ) n d s =0(12b )式中:C (q )=1-α/2π,α为第q 边界点处的角度;p 和q 分别为边界上的场点和源点,其坐标分别为(x ,z )和(ξ,η);l 为计算域内的源点,也是速度势的待求点;S 为整个计算域的边界,S =S F +S B +S ±∝+S 0,G 为仅满足基本控制方程的简单格林函数,其表达式为109第3期盛松伟,等:一种波浪能实验装置水动力学分析与优化设计G=ln 1r(13)式中:r为场点到源点的距离,r=(x-ξ)2+(z-η)2。