大众电动助力转向系统-自学手册
- 格式:doc
- 大小:2.09 MB
- 文档页数:34
第1章绪论1.1电动助力转向系统概述随着科学技术的飞速发展,汽车各方面的性能都有了很大的发展,但同时人们对汽车的性能也有了更高的要求。
为了取得更好的汽车性能,充分利用机械和电子两方面的优势,提供机电一体化的解决方案,日益被业界人士推崇为有效的应对策略。
虽然汽车是机械技术的完美再现,但是由于机械技术在短期内不会再有很大的突破,而电子技术正越来越体现出其相对而言更优越的地方,所以研制机、电相结合的汽车相关部件正成为当前的主要趋势。
转向系统作为汽车的一个重要组成部分,也同样顺应这样的发展趋势。
就目前而言,应当说也已经找到了比较完美的解决方案。
汽车助力转向系统是用于改变或保持汽车行驶方向的专门机构。
其作用是使汽车在行驶过程中能够按照驾驶员的意图,适时地改变其行驶方向,能与行驶系统配合共同保持汽车持续稳定地行驶。
汽车方向盘助力系统经历了从机械助力到液压助力(hydraulic Power steering HPS)再到电子液压助力系统(electric hydraulic power steering EHPS)这三个阶段的演变。
经过多年的探索,电动助力转向(Electric Power Steering ,简称EPS)作为一种全新的动力转向模式走入了业界的视野,并且很快成为动力转向系统研究与开发的的热点。
由于电动助力转向系统相对于液压动力转向系统有着诸多的优点,因此电动助力转向系统及其相关配套的部件的研究与开发正愈来愈备受各主要汽车生产企业的青睐。
电动助力转向系统(EPS,Electric Power Steering)是未来转向系统的发展方向。
该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。
另外,电动助力转向系统还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。
正是因为由于有了这些优点,电动助力转向系统作为一种新的转向技术,部分取代了液压动力转向系统(Hydraulic Power Steering,简称HPS)。
4. 大众汽车转向系统学习目标知识目标:(1)熟悉转向助力技术的发展历程;(2)熟悉几种可变转向比技术的特点;(3)掌握转向系统的组成;(4)掌握液压式助力转向系统的组成与工作原理;(5)掌握电控动力助力转向系统的组成与工作原理;(6)熟悉不同车车轮定位参数对行驶操控性的影响。
能力目标:(1)认识不同类型转向助力系统;(2)熟悉转向系统常见故障现象;(3)熟悉转向助力系统常见故障现象;(4)能够独立检查车轮定位参数是否正确。
4.1 转向系统概述汽车在行驶中,经常要改变行驶方向。
汽车上用来改变行驶方向的机构称为转向系统。
汽车行驶方向的改变是由驾驶人通过操纵转向系统来改变转向轮(一般是前轮)的偏转角度来实现的。
转向系统不仅可以改变汽车的行驶方向,使其按驾驶人规定的方向行驶,而且还可以克服由于路面侧向干扰力使车轮产生的转向作用,恢复汽车的行驶方向。
尽管汽车转向系统的结构形式多种多样,但都由转向操纵机构(转向盘到转向器之间的零部件)、转向器(也称转向机)和转向传动机构三大部分组成。
转向操纵机构的功能是产生转动转向器所必须的操纵力;转向器的功能是将转向盘的回转运动转换为传动机构的往复运动;转向传动机构的功能是将转向器输出的力和运动通过转向臂传递给转向轮。
汽车转向系按转向能源的不同分为机械转向系和动力转向系。
机械转向系统是以驾驶人的体力作为转向能源,所有传递力的构件都是机械的,可靠性高,但输出的转向力矩相对较小。
助力转向系统是在机械转向系统基础上加设一套转向助力装置而成,兼用驾驶人体力和发动机动力作为转向能源,也就是大部分转向能源由助力装置提供。
助力装置主要有液压助力系统、电子液压助力系统和电动转向系统。
1. 转向助力技术的发展现代车辆转向系统发展可以划分为5个阶段,即液压助力转向、电子液压伺服转向、电动助力转向(EPS)、主动转向和线控转向(SBW)。
这5种转向系统的集成度和功能范围依次递增,其中电子伺服转向相对于传统液压助力转向最大的优点是,通过引入传感器技术,使转向助力大小可以根据车速而变化;而EPS系统在此基础上还具有主动阻尼功能和主动回正功能。
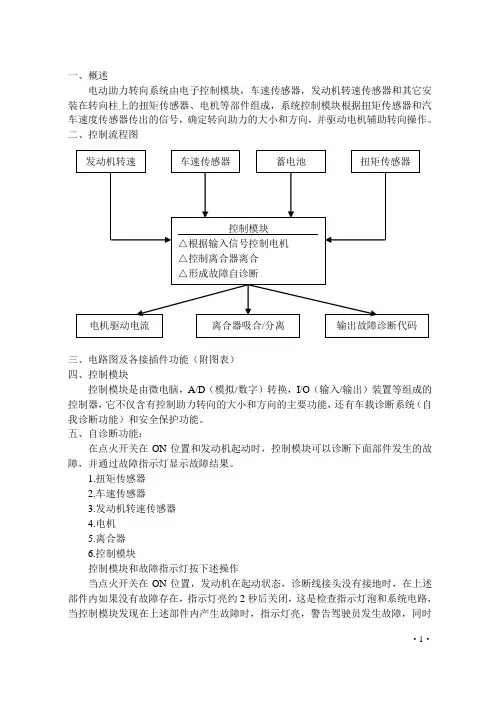
一、概述电动助力转向系统由电子控制模块,车速传感器,发动机转速传感器和其它安装在转向柱上的扭矩传感器、电机等部件组成,系统控制模块根据扭矩传感器和汽车速度传感器传出的信号,确定转向助力的大小和方向,并驱动电机辅助转向操作。
二、控制流程图三、电路图及各接插件功能(附图表)四、控制模块控制模块是由微电脑,A/D(模拟/数字)转换,I/O(输入/输出)装置等组成的控制器,它不仅含有控制助力转向的大小和方向的主要功能,还有车载诊断系统(自我诊断功能)和安全保护功能。
五、自诊断功能:在点火开关在ON位置和发动机起动时,控制模块可以诊断下面部件发生的故障,并通过故障指示灯显示故障结果。
1.扭矩传感器2.车速传感器3.发动机转速传感器4.电机5.离合器6.控制模块控制模块和故障指示灯按下述操作当点火开关在ON位置,发动机在起动状态,诊断线接头没有接地时,在上述部件内如果没有故障存在,指示灯亮约2秒后关闭,这是检查指示灯泡和系统电路,当控制模块发现在上述部件内产生故障时,指示灯亮,警告驾驶员发生故障,同时·1·在控制模块的备份存贮器里存贮故障代码。
当诊断开关接地进,通过指示灯闪动,控制模块控制故障指示灯显示故障代码。
当检查故障时,发动机必须运转。
六、安全防护功能,当出现异常的DTC时,控制模块将关闭电机和离器。
七、VSS(转速传感器)车速传感器根据车速大小产生成比例的信号(有的传感器信号可直接输入模块),车辆里程表将这些信号转换出相应的车速读数,同时也把它转换成双倍周期的方波信号输入控制模块。
八、发动机速度信号点火线圈的点火信号,作出发动机转速信号,通过ECU转换成数字信号,其一端送仪表,另一端输入控制模块。
九、诊断(附图故障代码表)在故障诊断中的注意事项1.当产生两个或更多的故障,故障诊断代码总是从最小的代码开始依次显示。
2.当点火电开关打开和发动机不起动时,显DTC22(发动机速信号),但是当发动机起动时,如果显示正常变化,就意味着正常。


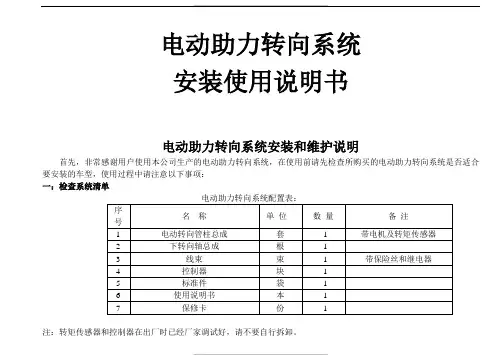
电动助力转向系统安装使用说明书电动助力转向系统安装和维护说明首先,非常感谢用户使用本公司生产的电动助力转向系统,在使用前请先检查所购买的电动助力转向系统是否适合要安装的车型,使用过程中请注意以下事项:一:检查系统清单注:转矩传感器和控制器在出厂时已经厂家调试好,请不要自行拆卸。
二:产品系统代号及适用车型系统代号:8000(x)适用车型:昌河北斗星、爱迪尔系统代号:8010(x)适用车型:美日、夏利、吉利四缸系统代号:8020(x)适用车型:哈飞民意、长安新星、长安星光、长安都市彩虹系统代号:8030(x)适用车型:美日、夏利、吉利三缸系统代号:8040(x)适用车型:哈飞路宝系统代号:8050(x)适用车型:五菱之光系统代号:8060(x)适用车型:奇瑞QQ系统代号:8070(x)适用车型:长安奔奔三:电动助力转向系统安装说明1、拆卸原机械管柱总成前请检查原车况是否正常,拆卸时请先拆下电池的负极,以防止拆装过程碰线引起电源短路。
2、机械管柱的拆卸:1、拆方向盘及管柱外围的防护板,2、拆卸机械管柱总成、下转向轴总成,3、拆下机械管柱总成上的点火开关(注意保护点火开关,避免损坏)。
3、电动管柱的安装:1、把点火开关安装在电动转向管柱总成上,2、把下转向轴总成安装到转向器总成上,3、把电动转向管柱总成套上下转向轴总成万向节(改吉利三缸车时,需要把保险盒支架固定在管柱上),4、锁紧转向管柱的安装螺丝[同时把线束中黑色线(粗线)接上搭铁],5、锁紧两头万向节的螺丝,6、安装方向盘及管柱外围的防护板。
4、控制器的安装定位:1、北斗星车安装在副驾驶前方工具箱下的发动机控制器下(需拆下工具箱安装);2、吉利车安装在变速杆罩内的发动机控制器上(需拆开变速杆罩安装);3、哈飞民意、长安车安装在副驾驶前方工具箱下(需拆下工具箱安装);4、奇瑞QQ可安装在管柱子旁。
5、线束的安装与连线:1、把线束中红/黑线接入点火开关(Key ON)中;2、线束中黑/黄线(粗线)接入电瓶正极上;3、把线束中黑色线(粗线)接入转向管柱总成的安装螺丝上进行搭铁;4、把线束中粉红线并接到车速信号线中;5、把线束中黄色线并接到转速信号线中。

◆文/北京 冯永忠大众ID.4的机电助力制动系统传统燃油汽车的制动系统使用真空助力,大众ID.4等纯电动汽车的制动系统配置了机电制动助力器(eBKV),这是大众纯电动汽车的第二代机电制动助力器。
除了增强制动力以外,机电制动助力器还减轻了制动系统的总重量,从而进一步降低了纯电动汽车的二氧化碳排放量。
大众ID.4纯电动汽车的机电制动助力器如图1所示。
图1 大众ID.4纯电动汽车的机电制动助力器使用机电制动助力器,提高了车辆行驶的安全性。
在需要极高制动压力,可能发生事故的工况时,机电制动助力器提高了诸如前辅助系统等驾驶员辅助系统的有效性,这种功能不能在传统的真空制动系统中实现。
机电制动助力器使得停车距离比传统真空助力制动系统短,车速从30km/h减速至停车时,紧急制动距离缩短多达1.3m,如图2所示。
而且由于停车距离较短,碰撞车速可降低约3km/h,这也使得行人事故避免率提高了10%。
降低车速还会减少碰撞过程中车身必须吸收的能量,从而提高对驾驶员和乘客的保护。
图2 机电制动助力器缩短紧急制动距离机电制动助力器的技术特点包括:平行轴电驱动,齿轮装置减重,控制单元外壳减重,无真空制动助力,没有额外的蓄压器,高达5.3kN的制动力辅助,质量约为4.4kg,电机输出功率370W,电压范围9.8~16V,最大扭矩为3.3N·m。
机电制动助力器总成如图3所示。
图3 机电制动助力器总成机电制动助力器的优点包括:驾驶员辅助功能快速产生制动压力,安全性高,减少车轮制动阻力扭矩,舒适的制动踏板触感,由于重量减轻和不使用真空泵而减少二氧化碳的排放,使用寿命长,电子稳定控制装置(ESC)的冗余制动系统。
一、助力制动系统的分类1.真空助力制动系统 传统汽油车配置真空助力制动系统,真空助力制动系统产生真空的3种方法包括发动机运行时在进气歧管产生真空,使用机械真空泵或电动真空泵。
这3种方法的缺点包括二氧化碳排放数据不佳,制动系统重量增加,生产成本高。
自学手册317带双小齿轮的电动机械转向助力器结构和功能电动机械转向助力器与液压转向器相比,具有许多优点。
它协助驾驶员行车,减轻身体和心理负担。
同时,它仅在需要时进行工作,也就是说只有当驾驶员需要转向助力时才提供帮助。
同时,转向助力与车速、转向力矩和转向角有关。
在本自学手册中您将了解电动机械转向助力器具体是如何运作的。
S317_001新技术注意说明本自学手册描述了新开发的结构最新的检测、调整和维修说明请参考和功能!其内容不再更新。
相关的售后服务维修手册。
2目录引言 (4)系统一览 (8)功能�..............................................................................................�9转向系统的机械机构�...................................................................�16转向系统的电气系统�...................................................................�17工作原理图�..................................................................................�27保养�..............................................................................................�283引言带双小齿轮的电动机械转向助力器总体视图转向系统的部件有:-方向盘-带转向角传感器G85的组合开关-转向柱-转向力矩传感器J269-转向器-电动机械转向助力器马达V187-转向辅助控制单元J500方向盘转向柱电动机械转向助力器马达V187十字万向轴转向力矩传感器J269转向器S317_089转向辅助控制单元J5004关于电动机械转向助力器,您需要知道:随着电动机械转向助力器的使用,液压式转向助力系统可以被取消了。
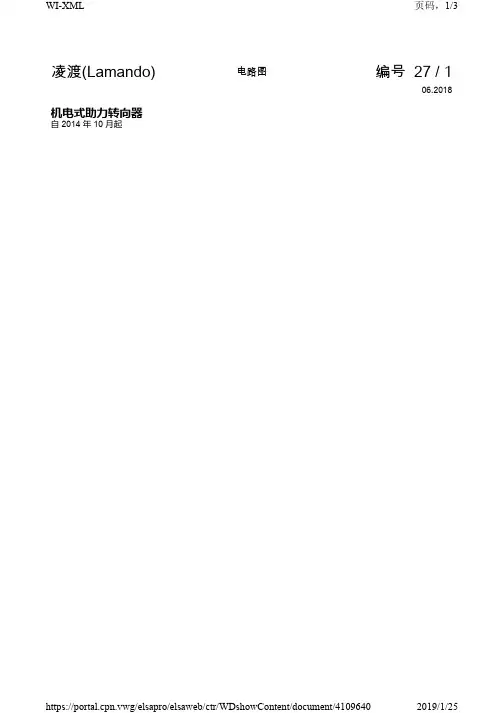
凌渡(Lamando)电路图编号 27 / 106.2018机电式助力转向器自 2014 年 10 月起BM1-027020618J 519J 500V 187MG 269G 85D51B626A+SA 380A E10.0rtT2cd /230aT5p /1ST5p /2-T5p /3ST5p /4T5p /5S0.5sw/viT6j 0.5swT3an /3S-15/10.5sw/viT17d /100.5sw/vi/10.35sw/viT73a /14S-1516.0rtws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色转向角传感器, 转向扭矩传感器, 助力转向控制单元, 机电式伺服转向电机A -蓄电池G85-转向角传感器G269-转向扭矩传感器J500-助力转向控制单元J519-车载电网控制单元SA3-保险丝架 A 上的保险丝3T2cd -2 芯插头连接T3an -3 芯插头连接T5p -5 芯插头连接T6j -6 芯插头连接T17d -17 芯插头连接T73a -73 芯插头连接V187-机电式伺服转向电机B626-正极连接 2(15),在主导线束中D51-正极连接 1(15),在发动机舱导线束中BM1-027030618J 285K 161J 533B664B663J 5001B406B397E142E1410.35gn*T20a 0.35gn*T18a 0.35ws*0.35ws*0.35ws*T20a 0.35ws*0.35or/gn*2/15CAN-H0.35or/br T20a /5CAN-L 0.35or/bl *2/18CAN-H 0.35or/br T20a /8CAN-L 10.0br T2cd /1310.35or/br T18a /17CAN-L 0.35or/gn*2/18CAN-H0.35or/brT17b 0.35or/bl*2T17b 0.35or/br /40.35or/bl*2/30.35or/br T6j 0.35or/bl*2T6j 0.35or/brT3an /1CAN-L /30.35or/bl T3an /2CAN-H/2ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs=粉红色组合仪表中的控制单元, 助力转向控制单元, 数据总线诊断接口, 机电式助力转向器指示灯J285-组合仪表中的控制单元J500-助力转向控制单元J533-数据总线诊断接口K161-机电式助力转向器指示灯T2cd -2 芯插头连接T3an -3 芯插头连接T6j -6 芯插头连接T17b -17 芯插头连接T18a -18 芯插头连接T20a-20 芯插头连接1-接地带,蓄电池 - 车身 B397 -连接 1(舒适 CAN 总线,High ),在主导线束中 B406-连接 1(舒适 CAN 总线,Low ),在主导线束中 B663 -连接(底盘传感器 CAN 总线,High ),在主导线束中 B664-连接(底盘传感器 CAN 总线,Low ),在主导线束中 E141-连接(底盘传感器 CAN 总线,High ),在发动机舱导线束中E142-连接(底盘传感器 CAN 总线Low ),在发动机舱导线束中*-自 2018 年 6 月起*2-截至 2018 年 6 月。
大众途安轿车电子助力转向系统设定方法1、转向零位的设定方法(1)前轮保持直线行驶状态,用VAS505l输入地址码44后,转向盘左转4~5度(一般在10度之内),回正转向盘。
(2)再向右转4~5度,将转向盘回正,双手离开转向盘。
(3)输入3l875,按返回键。
(4)输入功能04—60,按激活键。
(5)退出VAS505l,断开点火开关6s后即可。
注意:在做转向零位设定时,发动机不能运行。
转向盘左、右转动后再回正,双手必须离开转向盘,使转向盘静止不动,以便让控制单元对零位进行确认。
2、转向助力大小的设定方法用VAS505l进入44一10—0l,在VAS505l屏幕内的条形块上选择某个合适的助力数值(1档~16档),按保存键,然后再按接收键。
此时屏幕就会显示新设定助力大小的名称,然后再按返回键,退出即可。
注意:由中间位置向左或向右最大的旋转角度为90。
3、转向极限位置的设定方法如果在更换了转向角传感器G85、转向机总成(含转向控制单元J500)、转向柱开关总成(含控制单元J527)或做过一次四轮定位,做过转向零位(中间)设定后出现故障代码02546,则需要做转向极限位置的设定,,具体方法如下。
(1)将前轮保持在直线行驶状态,起动发动机,将转向盘向左转动10度左右,停顿Is~2s,回正。
(2)将转向盘向右转动10度,停顿ls~2s,回正。
(3)将双手离开转向盘,停顿ls~2s。
(4)将转向盘向左转到底.停顿ls一2s。
(5)将转向盘向右转到底.停顿1s一2s。
(6)将转向盘回正,断开点火开关6s,设定完成。
注意:在做转向零位(中间)设定和转向极限位置设定后,必须用VAS505l进入44—02查询转向系统有无故障代码,设定工作才能结束。
大众奥迪电动转向助力系统工作原理根据驾驶员的转向要求,转向控制单元控制电动机工作,进而起到转向助力的作用。
系统通过'主动回正'功能将转向轮置于中心位置,使车辆在各种情况下都能获得良好的平衡性及精确的直线行驶稳定性。
直线行驶稳定功能可以帮助驾驶员在车辆受到侧向风的作用时,或者在上下颠簸的路面上行驶时更容易控制车辆直线行驶。
一、速腾车电动转向助力系统的组成速腾车电动转向助力系统的部件有方向盘、转向柱、方向盘转角传感器、转向力矩传感器、转向齿轮、转向助力电动机及转向助力控制单元组成,如图1所示。
二、工作原理如图2所示,当驾驶员旋转方向盘时,转向助力系统开始工作。
安装于转向柱上的方向盘转角传感器将检测到的方向盘的旋转角度和旋转速度,以电信号的方式送至转向助力控制单元。
与此同时,作用在方向盘上的力矩经过传递驱动转向小齿轮旋转,转向力矩传感器检测到旋转力矩并将其传给控制单元。
根据转向力、发动机转速、车速、方向盘转角、方向盘转速以及存储在控制单元中的特性曲线图,控制单元计算出必要的助力力矩并控制电动机开始工作。
由电动机驱动的第二个小齿轮(驱动小齿轮)提供转向助力,从而驱动转向齿条。
方向盘转角传感器为光电式传感器,安装于转向柱上。
当驾驶员转动方向盘时,转向柱带动方向盘转角传感器的转子随方向盘一起转动,光源就会通过转子缝隙照在传感器的感光元件上产生信号电压。
由于转子缝隙间隔大小不同,故产生的信号电压变化也不同,其工作原理如图3所示。
转向力矩传感器为磁阻式传感器,其磁性转子和转向柱连接块为一体,磁阻传感元件和转向小齿轮连接块为一体,当转动方向盘时,转向柱连接块和转向小齿轮连接块反向运动,即磁性转子和磁阻传感元件反向运动,因此转向力矩的大小可以被测量出来并传递给控制单元,其工作原理如图4所示。
根据不同工作状况的需要,驾驶员作用于方向盘上的力矩大小不同,由该力矩产生的驱动转向小齿轮旋转的力矩大小也不同。
自学手册317带双小齿轮的电动机械转向助力器结构和功能电动机械转向助力器与液压转向器相比,具有许多优点。
它协助驾驶员行车,减轻身体和心理负担。
同时,它仅在需要时进行工作,也就是说只有当驾驶员需要转向助力时才提供帮助。
同时,转向助力与车速、转向力矩和转向角有关。
在本自学手册中您将了解电动机械转向助力器具体是如何运作的。
S317_001新技术注意说明本自学手册描述了新开发的结构最新的检测、调整和维修说明请参考和功能!其内容不再更新。
相关的售后服务维修手册。
2目录引言 (4)系统一览 (8)功能�..............................................................................................�9转向系统的机械机构�...................................................................�16转向系统的电气系统�...................................................................�17工作原理图�..................................................................................�27保养�..............................................................................................�283引言带双小齿轮的电动机械转向助力器总体视图转向系统的部件有:-方向盘-带转向角传感器G85的组合开关-转向柱-转向力矩传感器J269-转向器-电动机械转向助力器马达V187-转向辅助控制单元J500方向盘转向柱电动机械转向助力器马达V187十字万向轴转向力矩传感器J269转向器S317_089转向辅助控制单元J5004关于电动机械转向助力器,您需要知道:随着电动机械转向助力器的使用,液压式转向助力系统可以被取消了。
由于不再使用液压油,所以该转向系统在环境保护方面作出了重大贡献。
S317_106所使用的电动机械转向助力器是一种双小齿轮方案。
它以两只小齿轮(转向和驱动小齿轮)命名。
在它们的帮助下,需要的转向力被传导到齿条上。
S317_108提供转向助力时,将根据需要控制电动马达。
该系统为驾驶员提供了由行驶条件决定的转向助力(servotronic电控转向助力系统)。
S317_110电动机械转向助力器在“主动回位”功能下支持转向系统回位到正前行驶位置。
这可以在任何行驶状态下提供出色的正中感觉和格外精确的线性导向。
S317_111当车辆处于持续侧风冲击或倾斜的路面上时,正前行驶修正功能将产生一个助力力矩,减轻驾驶员在正前行驶时的负担。
S317_1125引言电动机械转向助力器的优点电动机械转向助力器与液压转向系统相比,主要它明显节约能源。
与液压转向系统需要持续通电优点在于不再需要液压系统。
从而形成如下优点,不同,电动机械转向助力器仅仅在确实需要转向如:的时候才消耗能源。
这种根据需求用电的方式降低了耗油量。
-取消了液压部件,如伺服机油泵、管路连接、�机油罐、过滤器,驾驶员在各种情况下都能有良好的驾驶感觉-取消了液压油,-节省了安装空间,-良好的正前行驶(转向系统回位到正前行驶-形成较小的噪音,�位置由电动机械转向助力器主动支持),-节约能源,-直接、轻缓地对转向指令作出响应,-取消了繁琐的管路连接和线路连接。
-路面不平整时不会产生不舒适的转向动作。
转向助力部件直接安装并在转向器上发挥作用。
每100公里最大可以节约能源0.2升。
6电动机械转向助力器及其部件转向小齿转向力矩传感器J269S317_100蜗轮传动驱动齿轮转向辅助控制单元J500电动机械转向助力器马达V1877系统一览系统一览J104 ABS控制单元G28 发动机转速�传感器G44-G47 转速传感器(车速信号)J248 柴油直接喷射�装置控制单元J533 数据总线诊断�接口J527 转向柱电子装置�控制单元J285 组合仪表中�带显示单元�的控制单元总线端15动力传动系统CAN总线G85 转向角传感器K161 指示灯J500 转向辅助控制单元V187 电动机械转向助力器马达G269 转向力矩传感器S317_018 8功能特性曲线组和特性曲线转向助力是通过一个控制单元永久程序存储器但是也可以在售后服务部通过汽车诊断、测量和中的特性曲线组来进行控制的。
该存储器统计信息系统VAS 5051利用“匹配功能”和“通道1”了最大16条不同的特性曲线组。
比如在高尔夫指令激活特性曲线组。
必须在更换控制单元或2004中从提供的特性曲线组中选择8条特性曲线转向系统时执行此操作。
组使用。
将根据要求(比如车辆重量)在出厂前激活一条特性曲线组。
v= 0 km/h v= 15 km/hv= 50 km/hv= 100 km/hv= 250 km/h转向力矩[Nm] S317_022比如从高尔夫2004的已有的8条特性曲线组中选择一条较重车辆的特性曲线组和一条较轻车辆的特性曲线组。
较重车辆较轻车辆特性曲线组中含有五条不同特性曲线用于不同的车速。
(比如0 km/h、15 km/h、50 km/h、100 km/h和250 km/h)。
一条特性曲线说明了在那种车速下的方向盘扭矩下电动马达驱动扭矩应提供多少转向助力。
9功能转向过程的功能S317_030方向盘上的扭矩助力扭矩有效力矩1. 转向助力过程从驾驶员转动方向盘起开始。
5. 转向助力是通过第二只平行于齿条发生作用�的小齿轮完成的。
该小齿轮是由电动马达驱动2. 利用方向盘上的扭矩转动转向器上的扭转棒。
�的。
该马达通过蜗轮传动和驱动小齿轮作用到�转向力矩传感器G269探测到转动,并将测得�齿条上,从而传送助力转向力。
�的转向力矩发送到控制单元J500。
6. 方向盘扭矩和助力扭矩的总和是转向器上引起3. 转向角传感器G85发送当前的转向角信号,�齿条运动的有效扭矩。
�转子转速传感器发送当前的转向速度信号。
4. 控制单元根据转向力矩、车速、内燃机发动机�转速、转向角和转向速度和控制单元中设置的�特性曲线确定需要的助力扭矩,并控制电动�马达。
10停车时的转向过程v=0 km/h方向盘上的扭矩助力扭矩有效力矩S317_0321. 停车时,驾驶员用力转动方向盘。
5. 这样就可以在停车时通过第二只平行于齿条�发生作用的小齿轮提供最大的转向助力。
2. 扭转棒被扭转。
转向力矩传感器G269探测到�扭转,并通知控制单元J500方向盘上施加了 6. 方向盘扭矩和最大助力扭矩的总和是停车时�大转向力矩。
�转向器上引起齿条运动的有效扭矩。
3. 转向角传感器G85发送大转向角信号,转子�转速传感器发送当前的转向速度信号。
4. 控制单元根据大转向力矩、车速0 km/h、内燃�发动机转速、大转向角、转向速度和控制单元�中设置的v=0 km/h时的特性曲线测定需要较大�的助力扭矩,并对电动马达进行控制。
11功能市区行驶时的转向过程v=50 km/h方向盘上的扭矩助力扭矩有效力矩S317_0341. 当在市区中转弯行驶时,驾驶员转动方向盘。
5. 这样就可以在转弯行驶时通过第二只平行于�齿条发生作用小齿轮提供中等力度的转向助力。
2. 扭转棒被扭转。
转向力矩传感器G269探测到�扭转,并通知控制单元J500方向盘上施加了 6. 方向盘扭矩和中等助力扭矩的总和是市区内�中等力度的转向力矩。
�转弯行驶时转向器上引起齿条运动的有效扭矩。
3. 转向角传感器G85发送中等转向角信号,转子�转速传感器发送当前的转向速度信号。
4. 控制单元根据中等力度的转向力矩、车速50 km/h、内燃发动机转速、中等的转向角、�转向速度和控制单元中设置的v=50 km/h时�的特性曲线测定需要中等幅度的助力扭矩,�并对电动马达进行控制。
12高速公路行驶时的转向过程v=100 km/h方向盘上的扭矩助力扭矩有效力矩S317_0361. 变换车道时,驾驶员轻微转动方向盘。
5. 这样就可以在高速公路转向过程中通过第二只�平行于齿条发生作用小齿轮提供少量转向助力2. 扭转棒被扭转。
转向力矩传感器G269探测到�或不提供转向助力。
�扭转,并通知控制单元J500方向盘上施加了�少量的转向力矩。
6. 方向盘扭矩和最小的助力扭矩的总和是变换�车道时转向器上引起齿条运动的有效扭矩。
3. 转向角传感器G85发送小转向角信号,转子�转速传感器发送当前的转向速度信号。
4. 控制单元根据小转向力矩、车速100 km/h、�内燃发动机转速、小转向角、转向速度和�控制单元中设置的v=100 km/h时的特性曲线�测定需要较小的助力扭矩或无需助力扭矩,�并对电动马达进行控制。
13功能主动回位回位力助力扭矩有效力矩S317_0381. 如果驾驶员在转弯行驶中降低转向力矩,扭转 4. 控制单元通过分析转向力矩、车速、内燃�棒会自动松开。
�发动机转速、转向角、转向速度和控制单元�中设定的特性曲线,计算出回位所需的电动2. 根据下降的转向力矩和转向角与转向速度之间�马达扭矩。
�的关系计算出额定快退速度。
然后将此速度�与转向角速度相比较。
由此得出回位扭矩。
5. 控制电动马达并使车轮回位至正前行驶位置。
3. 由于车桥的几何结构,会在转向的车轮上产生�回位力。
由于转向系统和车桥内的摩擦力,此�回位力通常太小,不能使车轮回位至正前行驶�位置。
14正前行驶修正正前行驶修正是由主动回位形成的一种功能。
这时将产生一个助力扭矩,使车辆回到无扭矩的正前行驶位置。
它分为暂时算法和长时算法。
长时算法暂时算法长时算法的任务是,补偿长期存在的正前行驶利用暂时算法可以修正短时的误差。
这样可以误差,比如从夏季轮胎更换到新使用的(旧的)减轻驾驶员的负担,比如当遇到持续侧风而必须冬季轮胎时出现的误差。
进行持续的“补偿转向”时。
1. 持续侧面作用力,如侧风等施加在车辆上。
2. 驾驶员转动方向盘,使车辆保持在正前行驶�方向上。
3. 控制单元通过分析转向力矩、车速、内燃S317_084�发动机转速、转向角、转向速度和控制单元�中设定的特性曲线,计算出正前行驶修正�所需的电动马达扭矩。
4. 控制马达。
汽车回位至正前行驶位置。
驾驶员�不再需要“补偿转向”。
回位力助力扭矩有效力矩15转向系统的机械机构转向器转向器由一只转向力矩传感器、一根扭转棒、一只转向和驱动小齿轮、一只蜗轮传动装置以及S317_085一只带控制单元的电动马达组成。
电动机械转向助力器的核心部件是一根齿条,它有两只花键啮合在转向器中。