电动助力转向系统建模与稳定性分析
- 格式:pdf
- 大小:925.59 KB
- 文档页数:3
汽车电动助力转向特性分析摘要:汽车电动助力转向系统(Electric Power Steering System简称EPS)是近年来发展起来的种新型动力转向系统,具有节能、质量轻、安全、环保等一系列优点,正逐步取代传统的液压助力转向系统,成为未来汽车转向系统的发展方向,其出现并迅速成为世界汽车技术研究的热点。
汽车转向系统的发展经历了从简单的纯机械转向系统、液压助力转向系统,电控液压助力转向系统,到更为节能、操纵性能更好的电动助力转向系统这几个阶段。
本文论述了EPS的特点、工作原理、结构组成、国内外的研究现状,通过对EPS各组成部分和汽车转向系统的分析出了EPS性能评价指标,并对三种助力特性曲线的特点进行了分析和比较。
EPS系统作为今后汽车转向系统的发展方向,这给EPS带来了更加广阔的应用前景。
关键词:电动助力转向;特性;发展Electric Power Steering Characteristics were AnalyzedAbstract :EPS is a new type of automobile steering system,which has the advantages of saving fuel,light,safety and producing less pollution. EPS is taking the place of HPS gradually and becoming the trend of steering system. It is rapidly become the hotspots in the research of automobile technology of the world.The developing process of steering system has experienced several phases from the simple Mechanical Steering System, Mechanical-Hydraulic Steering System to Electric-Hydraulic Steering System,till the Electric Power Steering System(EPS) with lower energy consumption and higher performance.The article discusses the characteristics of EPS,working principle,composition and the research status of domestic and abroad. Through the analysis of components of EPS system and the steering system, then the state function of the combination system model was deduced and the model for simulation was built in this paper. Given the EPS performance evaluation,analysis and compare the three types of assist characteristic,and then design a new type of assist curve in order to reduce the steering force which based on the parameters of a certain type of car. EPS has a great use in future.Keyword: Electric power steering Characteristic Development目录1 绪论 (1)1.1研究的目的和意义 (1)1.2国内外发展状况 (3)1.2.1国外发展状况 (3)1.2.2 国内发展状况 (4)2转向系统的概述 (6)2.1转向系统的发展过程 (6)2.1.1机械式转向系统 (6)2.1.2液压式助力转向系统(HPS) (7)2.1.3电液式助力转向系统(EHPS) (8)2.2电动助力转向系统 (10)2.2.1电动助力转向系统的结构 (10)2.2.2电动助力转向系统的工作原理 (11)2.2.3电动助力转向系统的类型 (13)2.2.4电动助力转向的关键技术 (14)2.2.5电动助力转向系统的优点 (15)3 电动助力转向系统受力与性能分析 (17)3.1电动助力转向系统受力 (17)3.2 理想转向盘力矩的研究 (18)3.3电动助力转向系统性能的主要评价指标 (19)3.3.1 转向回正能力评价 (19)3.3.2 转向轻便性评价 (19)3.3.3 转向盘中间位置操纵稳定性评价 (20)3.3.4 转向盘振动评价 (20)3.3.5 转向路感及路感强度 (21)4 电动助力转向助力特性研究 (22)4.1助力特性曲线定义 (22)4.2转向助力特性曲线设计概述 (22)4.3电动助力特性曲线类型 (23)4.3.1直线型 (24)4.3.2折线型 (25)4.3.3曲线型 (25)4.4不同助力特性曲线参数的影响 (26)5 结论与发展 (29)5.1结论 (29)5.2发展 (29)参考文献 (30)1绪论随着我国经济的持续发展,人民生活水平不断提高,汽车渐渐走入人们生活中,成为现代步伐的工具,而随着汽车保有量的增加以及由此带来的一系列问题,使得“安全、节能、环保”成为未来汽车发展的三大主题。
汽车电动助力转向系统建模及助力特性
刘培培;程源;罗威;邓英富;王宗伟
【期刊名称】《汽车工程师》
【年(卷),期】2015(000)010
【摘要】电动助力转向系统的助力特性作为研究电动助力转向的关键技术,已经越来越受到国内外汽车厂家的重视.通过ADAMS/Car软件建立了整车动力学模型,并通过建立蛇行试验和转向轻便性试验验证了模型的准确性和正确性.通过该整车动力性模型进行电动助力转向系统的助力特性的研究,并确定了一组车速感应直线型助力特性曲线,该曲线可以为转向稳定性和路感的研究提供理论指导,同时为后续的台架和整车试验提供依据.
【总页数】5页(P34-37,59)
【作者】刘培培;程源;罗威;邓英富;王宗伟
【作者单位】芜湖德孚转向系统有限公司;奇瑞汽车股份有限公司;芜湖德孚转向系统有限公司;芜湖德孚转向系统有限公司;芜湖德孚转向系统有限公司
【正文语种】中文
【相关文献】
1.汽车电动助力转向系统建模及助力特性 [J], 刘培培;程源;罗威;邓英富;王宗伟;
2.汽车电动助力转向系统助力特性的研究 [J], 袁带英
3.基于虚拟样机技术的汽车电动助力转向系统助力特性研究 [J], 谢鹏;顾力强
4.汽车电动助力转向系统助力特性分析及仿真研究 [J], 于发加
5.基于PID模糊控制的汽车电动助力转向系统助力特性研究 [J], 谢林;唐岚;王园园
因版权原因,仅展示原文概要,查看原文内容请购买。
第1篇一、实验目的本次实验旨在了解电动助力转向系统(EPS)的工作原理、性能特点以及与传统液压助力转向系统的差异。
通过实验,验证EPS在提高转向效率、降低能耗、提升驾驶舒适性和安全性等方面的优势。
二、实验原理电动助力转向系统(EPS)是一种利用电动机作为动力源的新型动力转向装置。
与传统液压助力转向系统相比,EPS省去了液压泵、油管等液压部件,采用电机直接驱动转向机构,从而实现转向助力。
EPS系统主要由以下几部分组成:1. 信号传感装置:包括扭矩传感器、转角传感器和车速传感器,用于检测驾驶员的转向意图、方向盘转角和车速等信息。
2. 转向助力机构:包括电机、减速器、离合器等,用于根据驾驶员的转向意图和车速,提供相应的转向助力。
3. 电子控制单元(ECU):根据扭矩传感器、转角传感器和车速传感器的信号,控制电机的旋转方向和助力电流的大小,实现实时助力转向。
三、实验内容1. EPS系统组成及工作原理讲解。
2. EPS系统与传统液压助力转向系统的对比实验。
3. EPS系统在不同车速下的转向助力性能测试。
4. EPS系统在转向过程中抗干扰性能测试。
四、实验步骤1. 准备实验设备:EPS系统实验平台、扭矩传感器、转角传感器、车速传感器、数据采集器等。
2. 搭建实验平台,连接实验设备。
3. 根据实验要求,设置实验参数。
4. 进行EPS系统与传统液压助力转向系统的对比实验,记录数据。
5. 在不同车速下进行EPS系统的转向助力性能测试,记录数据。
6. 在转向过程中进行EPS系统的抗干扰性能测试,记录数据。
7. 分析实验数据,得出结论。
五、实验结果与分析1. EPS系统与传统液压助力转向系统的对比实验结果显示,EPS系统在转向效率、能耗、驾驶舒适性和安全性等方面均优于传统液压助力转向系统。
2. EPS系统在不同车速下的转向助力性能测试结果显示,EPS系统在不同车速下均能提供稳定的转向助力,且转向助力大小与车速成正比。
电动助力转向系统1、功能原理汽车电动助力转向(EPS)系统是在机械式转向系统的基础上加装电动机驱动单元构成的。
其主要的是提供助力、改善汽车转向性能、协助驾驶员完成转向操作。
2、组成具体组成原理详细EPS系统由扭矩传感器、车速传感器、电自控制单元(ECU)、助力电动机及减速机构等。
○1扭矩传感器,又称转向传感器,其作用是测定方向盘与转向器之间的相对扭矩,并转化为电信号传递给ECU。
○电动机,其功能是根据ECU的相关指令,输出适宜的转向助力矩,是EPS系统的动力源。
○减速机构,接收电动机的转矩,经减速增矩后传递给转向轴、小齿轮或齿条。
○ECU,是EPS系统的控制中心,根据扭矩传感器和车速传感器的信号进行逻辑分析与计算并发出指令,控制电动机和离合器。
3、基本工作过程汽车转向时,扭矩传感器和车速传感器将检测到的扭矩、方向信号及车速信号传递给ECU,ECU根据扭矩传感器的信号和车速传感器的信号确定电动机扭矩的大小和方向,电动机再通过离合器、减速机构等把此扭矩传递给扭杆,最终起到为驾驶员提供转向助力的效果,使汽车转向更轻便。
车速越低转向助力越大,车速越高转向助力越小。
当车速大于一定值时,取消助力,将直流电动机反接制动,目的是在汽车高速行驶时增加操作方向盘的手感,保证行驶安全。
4、EPS系统的控制方式○助力控制:助力控制是EPS的基本控制模式,包括汽车原地转向助力控制和动态转向助力控制两个方面。
○回正控制:回正控制的目的是使方向盘能够更快、更准地回到中位,避免方向盘产生不必要的抖动。
○阻尼控制:阻尼控制是为了提高汽车高速行驶时的转向稳定性的一种控制模式。
5、EPS的优点○降低了燃油消耗液压动力转向系统需要发动机带动液压油泵,使液压油不停地流动,浪费了部分能量。
相反电动助力转向系统(EPS)仅在需要转向操作时才需要电机提供的能量,该能量可以来自蓄电池,也可来自发动机。
○增强了转向跟随性在电动助力转向系统中,电动助力机与助力机构直接相连可以使其能量直接用于车轮的转向。
电动助力转向系统稳定性分析
何仁;徐建平
【期刊名称】《江苏大学学报(自然科学版)》
【年(卷),期】2004(025)004
【摘要】在建立电动助力转向系统数学模型的基础上,对电动助力转向系统的稳定性进行了分析,应用控制理论推导了电动助力转向系统的稳定性判断条件,分析讨论了影响系统稳定性的结构参数等因素,指出了各影响因素的相应解决办法,为电动助力转向系统及控制器的设计与改进提供了有价值的理论依据.研究表明,对于一个设计定型的电动助力转向系统,各机构部件的许多参数很难改变,可以采用改变电子控制单元中助力增益的方法来使系统稳定工作,即在控制器设计中采用较小的助力增益,并通过试验进行了验证.
【总页数】4页(P294-297)
【作者】何仁;徐建平
【作者单位】江苏大学汽车与交通工程学院,江苏,镇江,212013;江苏大学汽车与交通工程学院,江苏,镇江,212013
【正文语种】中文
【中图分类】U461.4
【相关文献】
1.电动助力转向系统稳定性分析与研究 [J], 申荣卫;施国标;林逸;台晓虹
2.电动助力转向系统建模与稳定性分析 [J], 赵玉霞;张志显;王家岭
3.电动助力转向系统动力学模型及其零点稳定性分析 [J], 宁胜花;谭光兴
4.非线性闭环汽车电动助力转向系统稳定性分析 [J], 李强;何仁
5.轻型货车电动助力转向系统控制策略研究 [J], 刘清;林慕义;陈勇
因版权原因,仅展示原文概要,查看原文内容请购买。
摘要汽车电动转向器是一种新型的汽车转向助力系统。
文章先对EPS系统原理及结构进行说明,介绍了三种EPS典型助力曲线,建立了机械转向系统数学模型、EPS系统数学模型,文中提出了EPS系统控制目标,说明了EPS系统的PID控制策略,介绍了电动助力转向系统中的三种控制模式:助力控制模式,回正控制模式,阻尼控制模式,文章重点研究助力控制。
并建立了机械转向系统、EPS系统和基于PID控制的系统三种数学模型,然后应用MATLAB的Simulink模块进行运动仿真,通过调整参数和分析参数,来研究系统稳定性随参数变化的影响。
仿真结果表明,所设计的PID 控制对能对转向系统模型进提供助力控制,同时能使系统满足很好的动态性能。
关键词:电动转向器;助力控制;MA TLAB/Simulink;仿真AbstractElectric Power Steering is a new automotive power steering system.This article first on the principle and structure of EPS system are described, three kinds of typical EPS power curve is introduced in this paper, the mathematical model of the system, the EPS system mathematical model of the pure mechanical steering system is established in this paper, the target control of EPS system, the control strategy of EPS system of PID, this paper introduces three kinds of control mode of electric power steering in: power control mode, return control mode, the damping control mode, this paper focuses on the study of power control. Under pure mechanical steering system, EPS system and PID power control of EPS system based on the mathematical model, the application of MA TLAB/Simulink simulation, parameters, and analysis of influence parameters on the stability of the system, and the use of PID control strategy for power control of the model, and that the system can meet the dynamic performance is very good.Key words: electric power steering ; assist control ; MA TLAB/Simulink; simulationII目录摘要 (I)Abstract (II)目录 (V)1 绪论 (1)1.1 本课题的研究背景和意义 (1)1.2 国内外的发展概况 (1)1.3 本课题应达到的要求 (2)2 电动转向系统的动力学模型 (3)2.1 电动转向系统的结构和工作原理 (3)2.2EPS典型助力曲线 (5)2.3 EPS动力学的模型 (7)2.3.1 机械转向系统数学模型 (7)2.3.2 EPS系统的模型 (8)2.4 EPS稳定性与转向助力增益分析 (10)2.4.1 转向助力增益的确定 (10)2.4.2 EPS稳定性与转向助力增益关系 (11)3 EPS系统控制分析 (16)3.1系统控制的目标 (16)3.2 EPS系统的控制策略 (16)3.3 系统的控制模式 (17)3.4 系统的补偿控制 (18)3.4.1 补偿控制原理 (18)3.4.2 补偿控制的作用 (18)4 EPS系统的仿真与分析 (19)4.1 MATLAB/Simulink仿真平台的介绍 (19)4.2 系统仿真参数取值 (19)4.3 机械转向系统仿真与研究 (20)4.3.1 机械转向系统的Simulink模型 (20)4.3.2 汽车机械转向系统在阶跃输入时不同参数下的仿真研究 (22)4.3.3 不同参数对系统性能影响的仿真分析 (28)4.4 EPS转向系统仿真与研究 (28)4.4.1 EPS系统的Simulink模型 (28)4.4.2 EPS系统加入PID控制的Simulink模型 (30)4.4.3 EPS系统加入PID控制的仿真与分析 (32)4.5 不同系统的比较仿真与分析 (36)5 结论与展望 (40)5.1 主要结论 (40)5.2 不足之处及未来展望 (40)致谢 (41)参考文献 (41)附录 (42)汽车电动转向器动力学建模与控制仿真研究1 绪论1.1 本课题的研究背景和意义目前汽车已经走入寻常百姓家中,人们对汽车需求逐渐增大。
毕业设计说明书课题名称EPS电动助力转向系统的分析系别电气电子工程学院专业汽车电子技术班级汽电0811姓名王月学号0806221105指导教师陈宁起讫时间: 10 年9 月06 日~ 11 年1月16 日(共19周)摘要现在电子技术在汽车领域被广泛应用,电子化已经成为汽车发展的必然趋势。
理想的汽车助力转向系统不仅要求操纵轻便和灵敏,而且要求驾驶员有良好的“路感”。
传统的液压助力转向系统在整个助力过程中按固定的比例提供转向助力,所以能提供有效的转向助力,但还不能根本地解决汽车驾驶员操纵“路感”不足的问题。
电动助力转向系统(Electrical Power Steering,简称EPS) 与液压助力转向系统相比它有许多优点。
例如节能环保,回正性好,效率高,路感好等。
电动助力转向是转向系统中较新的技术,在国内外发展都很快。
本文研究的目的主要针对电动助力转向的结构特点和工作原理,分析电动助力转向对汽车转向性能的影响,提出转向轻便性、转向回正性、转向稳定性。
现在电动助力转向已经成为世界汽车技术发展的热点和前沿技术之一。
关键词:电子技术;汽车;电动助力转向系统;发展前景AbstractElectronic technology is now widely used in the automotive sector, Electronic technology has become the inevitable trend of automobile development.An ideal steering system is not only easy to handle and more effective, but also providesthe best steering feel to the driver. A conventional hydraulic power steering system uses power to supplement the force requirement to steer the wheel based on a fixed assist ratio of the driver’s input. So a conventional hydraulic power steering system is capable of providing power-assisted steering, but it is difficult to supplythe best steering feel.Electric power steering system (EPS) is more appropriate to realize an ideal steering .Than a conventional hydraulic power steering system. Such as saving and environmental protection, return, good, high efficiency and good road feel. Electric power steering is the steering system in the newer technologies develop very quicklyat home and abroad.The purpose of this study focused on the structural characteristics of electric power steering and working principle,Analysis of electric power steering on the vehicle steering performance, made light of the shift, shift back to positive, steering stability.Now the world's electric power steeringhas become a hot vehicle technology development and cutting-edge technologies.Keywords: electronics;vehicle; electric power steering system; development prospects目录摘要 (2)ABSTRACT (3)第一章绪论 (5)第二章电动助力转向系统 (6)2.1电动助力转向系统的组成 (6)2.2电动助力转向系统的功能 (6)2.3电动助力转向系统的工作原理 (8)第三章电动助力转向系统的控制系统 (10)3.1EPS控制系统总体结构 (10)3.2EPS控制系统的三种基本控制方式 (10)第四章电动助力转向系统技术要求 (13)4.1电动助力转向系统总体技术要求 (13)4.2EPS的关键部件 (13)4.2.1 扭转传感器 (13)4.2.2 直流电动机 (14)4.2.3 电磁离合器 (14)4.2.4 减速机构 (15)4.2.5 车速传感器 (16)4.2.6 电子控制单元ECU (16)第五章结论 (18)参考文献 (19)致谢 (20)第一章绪论随着电子技术在汽车领域的广泛应用,电子化将成为汽车发展的必然趋势。
第24卷Vol .24 第3期No .3重庆理工大学学报(自然科学)Journal of Chongqing University of Technol ogy (Natural Science )2010年3月Mar .2010 3 收稿日期:2009-12-16基金项目:江苏省汽车工程重点实验室开放基金项目(QC200703);2009年度扬州大学大学生学术科技创新基金资助项目作者简介:钱学武(1981—),男,山东临沂人,硕士研究生,主要从事汽车电子控制技术研究;马明星(1974—),男,安徽巢湖人,博士,副教授,硕士生导师,主要从事汽车系统动力学和汽车电子控制技术等方面的研究。
电动助力转向系统建模及仿真3钱学武,马明星,徐国民,管延才(扬州大学机械工程学院,江苏扬州 225127)摘 要:建立了电动助力转向系统主要部分的数学模型,根据助力原理设计了助力特性曲线,采用Matlab /Si m ulink 工具箱建立了无电机助力、无P I D 控制算法助力和有P I D 控制算法助力的仿真模型。
分析了3种模型的仿真结果,为进一步控制系统性能研究提供依据。
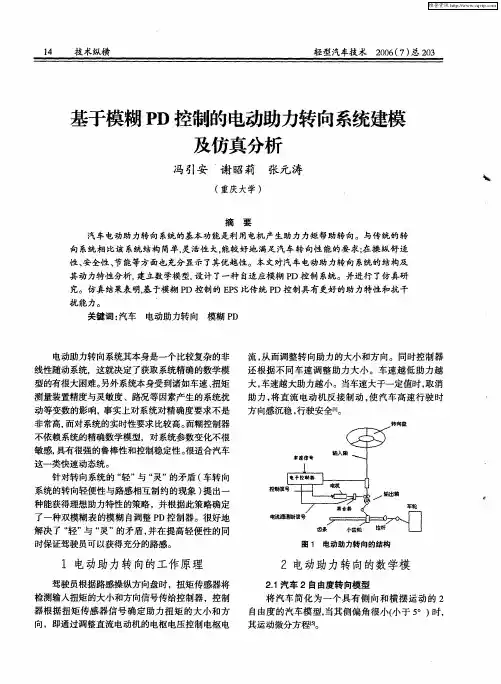
关键词:助力特性;Matlab;P I D中图分类号:U463.4 文献标识码:A文章编号:1674-8425(2010)03-0014-04S im ul a ti on and M odeli n g of Electr i c Power Steer i n g SystemQ I A N Xue 2wu,MA M ing 2xing,XU Guo 2m in,G UAN Yan 2cai(School of M echanical Engineering,Yangzhou University,Yangzhou 225127,China )Abstract:A t first,the mathe matic models of electric power steering syste m is built .The assisting characteristics curve is designed according t o the assisting p rinci p le,and si m ulati on models of syste m s with no power mot or,no P I D contr ol assist and with P I D contr ol assist are built thr ough Matlab /Si m u 2link t oolbox .A t last,the si m ulati on results of the three models are analyzed t o p r ovide reference f or further study on the perfor mance of contr ol syste m.Key words:assist characteristic;Matlab;P I D1 系统组成及工作原理电动助力转向系统(electric power steering,简称EPS )主要由机械转向系统、转矩传感器、车速传感器、电流传感器、控制单元(ECU )、离合器、助力电动机及减速机构等组成,如图1所示。
电动助力转向控制及对操纵性能影响研究电动助力转向控制是一种新型技术,它能够帮助驾驶员在低速行驶中更加轻松地操纵车辆,也能加强高速运动时的稳定性。
本文将介绍电动助力转向控制的工作原理,以及它对操纵性能的影响。
首先,电动助力转向控制是通过电动机来为转向系统提供额外的动力的。
这种额外的动力可以帮助驾驶员更容易地旋转方向盘。
在低速行驶中,驾驶员往往需要花费很大的力气才能控制车辆的转向,而电动助力转向控制可以减轻这种负担,让驾驶员更加轻松地操纵车辆。
其次,电动助力转向控制还可以加强车辆在高速运动时的稳定性。
在高速行驶中,车辆的稳定性非常重要,因为如果车辆不能保持稳定,就容易出现危险情况。
电动助力转向控制可以通过控制转向系统来提高车辆的稳定性,从而为驾驶员提供更安全的行驶体验。
除了提高驾驶员的操纵体验和车辆的稳定性之外,电动助力转向控制还可以提高车辆的燃油经济性。
传统的转向系统通常需要驾驶员花费大量的能量才能控制方向盘,而电动助力转向控制则可以减轻这种负担,从而使发动机不必消耗那么多燃料。
然而,电动助力转向控制也会对操纵性能产生一些不利的影响。
例如,由于驾驶员不再需要花费很大的力气来控制方向盘,他们可能会更加随意地旋转方向盘,从而导致车辆的行驶轨迹不稳定。
此外,电动助力转向控制还可能会影响驾驶员对车辆的掌控感,因为他们不能完全感受到车辆的行驶状况。
综上所述,电动助力转向控制是一项有利可图的技术,它可以让驾驶员更加轻松地操纵车辆,提高车辆的稳定性和燃油经济性。
然而,它也会对驾驶员的操纵感和掌控感产生一定的负面影响。
因此,在开发和应用电动助力转向控制技术时,我们应该权衡好它的优缺点,以确保它对操纵性能的影响尽可能小。
电动助力转向控制技术已经在一些车型中得到应用,下面我们来看一些相关的数据。
以2019年度销量排行前十的汽车品牌为例进行分析。
首先,排名第一的是丰田,其旗下的几款车型均采用了电动助力转向控制技术。
比如,丰田普锐斯、雷凌、卡罗拉等车型均配备了EPS(Electric Power Steering)电动助力转向控制系统。
第37卷第1期吉林大学学报(工学版Vol. 37No. 12007年1月Journal of Jilin University (Engineering and Technology EditionJ an. 2007收稿日期:2006203216.基金项目:北京市科学技术委员会项目(D0305002040111 .作者简介:施国标(1972 , 男, 讲师, 博士. 研究方向:车辆系统动力学与电子控制.E 2mail :sgb@. cn电动助力转向系统的建模与仿真技术施国标1, 申荣卫1,2, 林逸1(1. 北京理工大学机械与车辆工程学院, 北京100081; 2. 邢台职业技术学院汽车系, 河北邢台054035摘要:概述了电动助力转向系统(EPS 的结构和工作原理, 并介绍了电动助力转向系统助力特性的设计方法。
在分析了电动助力转向系统各组成部分数学模型的基础上, Simulink 的电动助力转向系统仿真模型。
采用了PID 流进行闭环跟踪控制。
仿真结果表明:间的矛盾, 同时, 。
关键词:; ; :167125497(2007 0120031206Modeling and simulation of electric pow er steering systemShi Guo 2biao 1, Shen Rong 2wei 1,2, Lin Y i 1(1. School ofMechanical and V ehicle Engineering , B ei j ing I nstitute ofTechnolog y , B ei j ing 100081China;2. De partment of A utomobile , X ingtai V ocational and Technical College , X ingtai 054035, ChinaAbstract :The st ruct ure and working p rinciple of t he elect ric power steering (EPS system were summarized and t he design met hod of t he assistance characteristic of t he EPS system was int roduced. From t he analysis of t he mat hematical models of t he component modules of t he EPS system a simulation model based on Simulink was built. The clo se 2loop cont rol st rategies of PID and PWM were adopted to cont rol t he target current of t he motor of t he EPS system. The simulation result s show t hat t he designed assistance characteristic alleviates t he contradiction between t he steering agility and t he road feel , and t he act ual current of t he motor follows p recisely t he target current , proving t he validity of t he cont rol st rategy.K ey w ords :vehicle engineering ; elect ric power steering (EPS ; assistance characteristic ; modeling ; simulation电动助力转向系统的开发一般包括系统总体设计、建模仿真、试验台试验、实车试验、性能优化等环节[1]。
电动助力转向系统动力学模型及其零点稳定性分析宁胜花;谭光兴【摘要】在任意转向角度的情况下,依据汽车轮胎侧偏特性,建立电动助力转向(EPS)系统动力学模型.应用Lyapnuon稳定性理论分析模型的参数对模型零点稳定性的影响,并结合汽车转向部件的实际特性,给出模型零点稳定性时的充分条件.【期刊名称】《广西科学》【年(卷),期】2013(020)002【总页数】4页(P95-98)【关键词】电动助力转向;动力学模型;Lyapnuon函数;稳定性【作者】宁胜花;谭光兴【作者单位】上汽通用五菱汽车股份有限公司,广西柳州 545007;广西科技大学电气与信息工程学院,广西柳州 545006【正文语种】中文【中图分类】O175;U463.4近年来,电动助力转向(Electric Power Steering,简称EPS)系统已成为汽车技术发展的一个关键环节,其性能关系到汽车行驶的稳定性和安全性.国外的研究人员曾采用几种不同自由度的EPS系统动力学模型分析EPS系统对汽车稳定性的影响,国内也有一些学者对EPS动力学模型的稳定性进行过研究.刘照等[1]将三自由度的转向系统动力学模型和车辆横向动力学模型相结合,以频域法分析影响系统稳定性的因素.但由于EPS系统是一个多变量非线性系统,频域分析还不能全面地反映影响电动助力转向系统的因素.文献[2]将五自由度的EPS系统动力学模型与驾驶员模型结合,构造汽车非线性闭环EPS系统模型,并用常微分方程稳定性理论研究整车参数对汽车稳定性的影响.以上研究只是针对汽车小转角情况进行EPS稳定性分析.为了简化模型并能全面地分析系统的稳定性,本文在汽车任意转角的情况下,建立EPS系统的动力学模型,并针对EPS系统的平衡点,应用Lyapunov稳定性理论[3]分析了EPS系统稳定性与模型物理参数的相互联系.同时给出一组系统的结构参数,并计算得到该参数下系统的临界失稳速度.系统临界失稳速度随系统的结构参数值变化而改变,在实际EPS系统的设计中可以尝试对满足条件的模型参数进行组合,从而选择符合实际需要的最佳模型参数.1 EPS系统的动力学模型1.1 两自由度操纵模型最简单的车辆操纵模型可以由一单质量刚体来表示,在外力和外力矩作用下,该刚体具有三个自由度,即纵向运动、侧向运动和横摆运动[4].当汽车在水平面内以一定的速度行驶时,可忽略汽车的纵向运动,即可将汽车近似的看成两自由度的线性系统(1.1)和(1.2).式中,m、v、Iz分别为汽车质量、车速和绕重心垂直轴的转动惯量;β、δ、ω分别为汽车质心侧偏角、前轮转角、横摆角速度;L1、L2分别为汽车质心到前、后轴的水平距离;Kf、Kr分别为前、后轮的侧偏刚度.1.2 轮胎侧偏模型轮胎侧偏特性是研究汽车的操作稳定性的基础[5].在侧偏角小的情况下,可认为轮胎的侧偏模型是线性的[6].有些情况下,小转角并不能满足实际需要,因此需采用文献[7]提出的轮胎侧偏特性一般理论模型.轮胎的侧向变形如图1所示,其中u为P点的相坐标,μ为定摩擦系数,Fz、η(u)为垂直载荷及其分布函数,ξ(u)胎体变形函数.轮胎物理参数:kcd为胎体侧向弯曲刚度,kd为胎面分布刚度,a为印迹半长度.图1 轮胎侧向变形Fig.1 The tire lateral deformation1.3 电动机模型在EPS系统中采用直流电机,忽略其电感,则电动机端电压U与电枢电阻R和电流I的电压平衡方程[8]为电动机的电流和电动机电磁力矩存在以下的关系:式中:Ke、Ka分别为电动机的反电动势系数、电磁转矩系数.1.4 EPS系统模型电动助力转向系统主要的元件有:传感器、电动机、电子控制单元、减速机构等[9],其结构如图2.为简化计算过程,可将前轮及转向机构向转向柱简化,得到转向盘、转向柱、电动机动力学模型如下:式中:θh,θc,θm 分别为转向盘、转向柱、电动机的转角;Jh,Jc,Jm分别为转向盘转动惯量、前轮及转向机构向转向柱等效后的转动惯量、电动机的转动惯量;Bh,Bc,Bm分别为转向盘的阻尼、前轮及转向机构向转向柱等效后的阻尼、电动机的阻尼;Th,Ta,Tm分别为方向盘力矩、电动机作用到转向柱的助力力矩、电动机电磁力矩;Ks为转矩传感器的刚度;Ga,Gb分别为电动机到转向柱的传动比、转向柱到前轮的传动比.图2 EPS系统结构Fig.2 The system structure of EPS2 EPS系统动力学模型稳定性分析以上是基于Lyapnuon函数分析系统零点稳定情况下,模型参数应该满足的条件.由上面的(3)知,的情况下,都能够保证系统零点的稳定性.但实际情况是,转矩传感器的刚度要比转向盘的转动惯量大,即Ks≠Jh,所以在汽车EPS系统设计过程中除了理论分析,还应考虑汽车各部件的实际特性.在系统的结构参数确定的情况下,可以计算系统的临界失稳定速度.选取汽车的模型参数如下:结合上述EPS系统零点稳定性分析结果和系统结构参数,计算得到上述EPS系统的临界失稳定速度为vmax=33.14m/s.分析可知,当增大转向盘的阻尼系数时可以提高系统的临界失稳速度,综合考虑整车系统,可以选择适当的转向盘阻尼系数匹配整车性能.3 结束语本文结合转向柱助力式转向系统和轮胎的侧偏特性,建立任意转角情况下的汽车电动助力转向系统动力学模型,并通过构造Lyapnuon函数,对该系统的零点稳定做了理论分析,得知模型参数满足一定的关系时,该系统是零点稳定的.同时我们还给出系统的临界失稳速度.由分析结果可知,在EPS系统实际的开发和设计过程中,务必要将理论分析与实际转向部件特性相结合,才能开发出符合实际需求的系统.参考文献:[1]刘照,杨家军,廖道训.基于混合灵敏度方法的电动助力转向系统控制[J].中国机械工程,2003,14(10):874-876.[2]李强,何仁.非线性闭环汽车电动助力转向系统稳定性分析[J].森林工程,2008,24(1):37-40.[3]段广仁.线性系统理论[M].哈尔滨:哈尔滨工业大学出版社,2002.[4]卢娟.电动助力转向系统建模与仿真研究[D]:重庆:重庆大学车辆工程,2006.[5]许洪国.汽车理论[M].北京:人民交通出版社,2008.[6] Pacejka H B,Bakker E.The magic formula tire mode[J].Vehicle System Synamics,1992(21):1-8.[7]郭孔辉.轮胎侧偏特性的一般理论模型[J].汽车工程,1990,3:1-12. [8]李伟,刘晓.汽车电动助力转向系统特性研究[J].客车技术与研究,2005,4:1-5.[9]吕振,杨新华.基于改进模糊PID控制的EPS系统建模仿真[J].计算机仿真,2009(9):232-234,255.[10]马知恩,周义仓.常微分方程定性与稳定性方法[M].北京:科学出版社,2001.。
关于电动汽车动力转向建模优化设计作者:许栋鹏来源:《汽车世界·车辆工程技术(下)》2019年第06期摘要:对于汽车的整体性能影响最大的就是电动助力转向系统,它对汽车的稳定性和安全性都有着至关重要的作用。
对此就需要我们能够对转向系统进行系统分析,进而找到相应的措施进行建模优化。
关键词:电动助力转向系统;性能分析;优化设计对于电动汽车来说,其电动助力转向系统主要是对其构成以及原理进行分析,并参照数据进行模型的构建,并且在此基础上对其系统的传递函数、相关参数等等进行分析,找出可能受到影响的因素,进行对此来对此进行优化,让其系统的稳定性和整体的安全性能有大幅度的提高。
1 电动助力转向系统概述总的来看,如今电动助力转向系统越来越受人们的欢迎,它不同于液压助力转向系统。
整体性能上都要比液压助力转向系统更加高,比如:转向特性;节能;环保;稳定性以及安全性等等。
并且它还在其基础上采用了助力电动机和减速结构,能让整体的转向性能有了很大的提升。
如今,助力电机的很多参数都对其汽车的性能都有一定的影响,需要我们能够根据实际情况对其进行分析研究,以转动惯量、转向机構等参数进行多重考虑,进而让整体的系统能够有更好的依据进行系统的优化。
在模型的建立过程中,通常用的是Matlab模型、simulink模型等等进行联合构建,这样能够更加有针对性的进行相关转动性能的影响分析。
2 电动助力转向系统的建模2.1 电动助力转向系统的组成和工作原理在电动助力转向系统中有很多种助力方式,比如:转向轴助力式、齿条助力式、小齿轮助力式等等。
而转向轴助力式最为常见,该系统在组成上也比较经典,主要有转向盘、传感器、减速机构、转向器等等,其中传感器里包括车速传感器和扭矩传感器。
在转向过程中,需要转矩传感器能够在信号的推动下传送到电子控制单元上,利用控制系统对其助力电机进行力矩的输出,这样再与齿轮齿条转向器结合在一起最终实现转向。
2.2 电动助力转向系统的建模在建模过程中,通常要对其系统进行一定的计算分析,这样才能保证整体的模块能够更加精准。