动态规划(完整)
- 格式:ppt
- 大小:1.24 MB
- 文档页数:104
第6章 动态规划动态规划(Dynamic Programming )是解决多阶段决策过程最优化的一种有用的数学方法。
它是由美国学者Richard .Bellman 在1951年提出的,1957年他的专著《动态规划》一书问世,标志着运筹学的一个重要分支-动态规划的诞生.动态规划也是一种将多变量问题转化为单变量问题的一种方法。
在动态规划中,把困难的多阶段决策问题变换成一系列相互联系的比较容易的单阶段问题一个个地求解。
动态规划是考察解决问题的一种途径 ,而不是一种特殊的算法,不像线性规划那样有统一的数学模型和算法(如单纯形法).事实上,在运用其解决问题的过程中还需要运用其它的优化算法。
因此,动态规划不像其它方法局限于解决某一类问题,它可以解决各类多阶段决策问题。
动态规划在工程技术、经济管理等社会各个领域都有着广泛的应用,并且获得了显著的效果。
在经济管理方面,动态规划可以用来解决最优路径问题、资源分配问题、生产调度问题、库存管理问题、排序问题、设备更新问题以及生产过程最优控制问题等,是经济管理中一种重要的决策技术。
许多规划问题用动态规划的方法来处理,常比线性规划或非线性规划更有效。
特别是对于离散的问题,由于解析数学无法发挥作用,动态规划便成为了一种非常有用的工具。
动态规划可以按照决策过程的演变是否确定分为确定性动态规划和随机性动态规划;也可以按照决策变量的取值是否连续分为连续性动态规划和离散性动态规划。
本教材主要介绍动态规划的基本概念、理论和方法,并通过典型的案例说明这些理论和方法的应用。
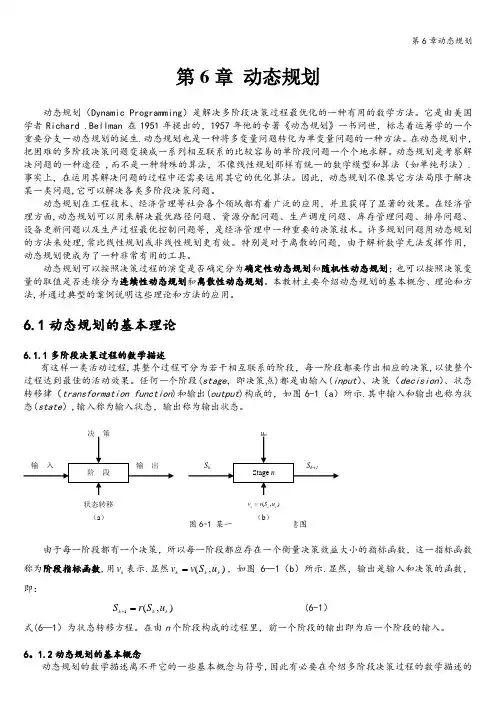
6.1动态规划的基本理论6.1.1多阶段决策过程的数学描述有这样一类活动过程,其整个过程可分为若干相互联系的阶段,每一阶段都要作出相应的决策,以使整个过程达到最佳的活动效果。
任何一个阶段(stage ,即决策点)都是由输入(input )、决策(decision )、状态转移律(transformation function )和输出(output )构成的,如图6-1(a )所示.其中输入和输出也称为状态(state ),输入称为输入状态,输出称为输出状态。
第三章:动态规划3.1 动态规划的基本概念一、动态决策问题:决策过程具有阶段性和时序性(与时间有关)的决策问题。
即决策过程可划分为明显的阶段。
二、什么叫动态规划(D.P.–Dynamic Program):多阶段决策问题最优化的一种方法。
广泛应用于工业技术、生产管理、企业管理、经济、军事等领域。
三、动态规划(D.P.)的起源:1951年,(美)数学家R.Bellman等提出最优化原理,从而建立动态规划,名著《动态规划》于1957年出版。
四、动态决策问题分类:1、按数据给出的形式分为:•离散型动态决策问题。
•连续型动态决策问题。
2、按决策过程演变的性质分为:•确定型动态决策问题。
•随机型动态决策问题。
五1、阶段(stage)n :作出决策的若干轮次。
n = 1、2、3、4、5。
2、状态(state)S n :每一阶段的出发位置。
构成状态集,记为S nS 1={A},S 2={B 1,B 2,B 3},S 3={C 1,C 2,C 3},S 4={D 1,D 2,D 3},S 5={E 1,E 2}。
阶段的起点。
3、决策(decision)X n :从一个阶段某状态演变到下一个阶段某状态的选择。
构成决策集,记为D n (S n )。
阶段的终点。
D 1(S 1)={X 1(A)}={B 1,B 2,B 3}= S 2,D 2(S 2)={X 2(B 1),X 2(B 2),X 2(B 3)}={C 1,C 2,C 3}=S 3,D 3(S 3)={X 3(C 1),X 3(C 2),X 3(C 3)}={D 1,D 2,D 3}=S 4,D 4(S 4)={X 4(D 1),X 4(D 2),X 4(D 3)}={E 1,E 2}=S 5D 5(S 5)={X 5(E 1),X 5(E 2)}={F;F}={F}。
4、策略(policy):全过程中各个阶段的决策Xn 组成的有序总体{Xn }。
如 A àB2àC1àD1àE2àF5、子策略(sub-policy):剩下的n个阶段构成n子过程,相应的决策系列叫n子策略。

第3章动态规划动态规划是一种通过将问题分解为子问题,并且以自底向上的方式求解子问题从而求解整个问题的算法设计方法。
它在计算机科学中的应用非常广泛,特别是在优化问题和组合优化问题中。
动态规划的核心思想是将问题划分为多个重叠子问题,并且将计算结果储存起来以供后续使用。
通过这种方式,可以避免重复计算,提高算法效率。
动态规划通常适用于满足最优子结构的问题,即问题的最优解可以通过一系列子问题的最优解得到。
在动态规划中,需要定义一个状态转移方程,用于描述问题的最优解与其子问题的最优解之间的关系。
通过利用状态转移方程,可以从最底层的子问题开始,逐步求解出更大规模的问题的最优解。
最终,可以得到整个问题的最优解。
动态规划的基本步骤包括问题建模、确定状态、定义状态转移方程、确定边界条件和计算最优解。
首先,需要将原始问题转化为适合动态规划求解的形式,通常可以采用数学建模的方法。
然后,需要确定问题的状态,即将问题划分为多个子问题,并且定义子问题的状态。
接下来,需要定义状态转移方程,该方程记录了问题的最优解与子问题的最优解之间的关系。
然后,需要确定边界条件,即问题的最基本解。
最后,通过逐步计算子问题的最优解,得到整个问题的最优解。
动态规划在多个领域都有广泛的应用。
在计算机科学中,动态规划被广泛应用于图论算法、字符串处理算法、序列比对算法等。
此外,动态规划还被应用于经济学、运筹学和生物学等领域的优化问题。
通过应用动态规划,可以有效地解决这些领域中的复杂问题。
总结起来,动态规划是一种通过将问题划分为多个子问题,并且利用状态转移方程求解子问题从而求解整个问题的算法设计方法。
通过避免重复计算,动态规划可以提高计算效率,并且被广泛应用于计算机科学和其他领域的问题求解。

(完整版)动态规划问题常见解法动态规划问题常见解法一、背包问题1. 0/1背包问题0/1背包问题是动态规划中的经典问题,解决的是在背包容量固定的情况下,如何选择物品放入背包,使得总价值最大化。
常见的解法有两种:记忆化搜索和动态规划。
记忆化搜索是一种自顶向下的解法,通过保存子问题的解来避免重复计算,提高效率。
动态规划是一种自底向上的解法,通过填表格的方式记录每个子问题的解,最终得到整个问题的最优解。
2. 完全背包问题完全背包问题是在背包容量固定的情况下,如何选择物品放入背包,使得总价值最大化,且每种物品可以选择任意个。
常见的解法有两种:记忆化搜索和动态规划。
记忆化搜索和动态规划的思路和0/1背包问题相似,只是在状态转移方程上有所不同。
二、最长公共子序列问题最长公共子序列问题是指给定两个序列,求它们之间最长的公共子序列的长度。
常见的解法有两种:递归和动态规划。
递归的思路是通过分别考虑两个序列末尾元素是否相等来进一步缩小问题规模,直至问题规模减小到边界情况。
动态规划的思路是通过填表格的方式记录每个子问题的解,最终得到整个问题的最优解。
三、最短路径问题最短路径问题是指在加权有向图或无向图中,求解从一个顶点到另一个顶点的最短路径的问题。
常见的解法有两种:Dijkstra算法和Bellman-Ford算法。
Dijkstra算法是通过维护一个距离表,不断选择距离最短的顶点来更新距离表,直至找到目标顶点。
Bellman-Ford算法是通过进行多次松弛操作,逐步缩小问题规模,直至找到目标顶点或发现负权环。
总结:动态规划是一种解决最优化问题的常见方法,它通过分组子问题、定义状态、确定状态转移方程和填表格的方式,来得到整个问题的最优解。
在解决动态规划问题时,可以采用记忆化搜索或者动态规划的策略,具体选择哪种方法可以根据问题的特点和优化的需要来决定。
100个动规方程 1. 资源问题1-----机器分配问题 F[I,j]:=max(f[i-1,k]+w[i,j-k]) 2. 资源问题2------01背包问题 F[I,j]:=max(f[i-1,j-v]+w,f[i-1,j]); 3. 线性动态规划1-----朴素最长非降子序列 F:=max{f[j]+1} 4. 剖分问题1-----石子合并 F[i,j]:=min(f[i,k]+f[k+1,j]+sum[i,j]); 5. 剖分问题2-----多边形剖分 F[I,j]:=min(f[i,k]+f[k,j]+a[k]*a[j]*a); 6. 剖分问题3------乘积最大 f[i,j]:=max(f[k,j-1]*mult[k,i]); 7. 资源问题3-----系统可靠性(完全背包) F[i,j]:=max{f[i-1,j-c*k]*P[I,x]} 8. 贪心的动态规划1-----快餐问题 F[i,j,k]:=max{f[i-1,j',k']+(T-(j-j')*p1-(k-k')*p2) div p3} 9. 贪心的动态规划2----过河 f=min{{f(i-k)} (not stone) {f(i-k)}+1} (stone); +贪心压缩状态 10. 剖分问题4-----多边形-讨论的动态规划 F[i,j]:=max{正正 f[I,k]*f[k+1,j]; 负负 g[I,k]*f[k+1,j]; 正负 g[I,k]*f[k+1,j]; 负正 f[I,k]*g[k+1,j];} g 为min 11. 树型动态规划1-----加分二叉树 (从两侧到根结点模型) F[I,j]:=max{f[I,k-1]*f[k+1,j]+c[k]} 12. 树型动态规划2-----选课 (多叉树转二叉树,自顶向下模型) F[I,j]表示以i 为根节点选j 门功课得到的最大学分 f[i,j]:=max{f[t.l,k]+f[t.r,j-k-1]+c} 13. 计数问题1-----砝码称重 f[f[0]+1]=f[j]+k*w[j]; (1<=i<=n; 1<=j<=f[0]; 1<=k<=a;)14. 递推天地1------核电站问题 f[-1]:=1; f[0]:=1; f:=2*f[i-1]-f[i-1-m] 15. 递推天地2------数的划分 f[i,j]:=f[i-j,j]+f[i-1,j-1]; 16. 最大子矩阵1-----一最大01子矩阵 f[i,j]:=min(f[i-1,j],v[i,j-1],v[i-1,j-1])+1; ans:=maxvalue(f); 17. 判定性问题1-----能否被4整除 g[1,0]:=true; g[1,1]:=false; g[1,2]:=false; g[1,3]:=false; g[i,j]:=g[i-1,k] and ((k+a[i,p]) mod 4 = j) 18. 判定性问题2-----能否被k 整除 f[I,j±n mod k]:=f[i-1,j]; -k<=j<=k; 1<=i<=n 20. 线型动态规划2-----方块消除游戏 f[i,i-1,0]:=0 f[i,j,k]:=max{f[i,j-1,0]+sqr(len(j)+k), f[i,p,k+len[j]]+f[p+1,j-1,0]} ans:=f[1,m,0] 21. 线型动态规划3-----最长公共子串,LCS 问题 f[i,j]={0(i=0)&(j=0); f[i-1,j-1]+1 (i>0,j>0,x=y[j]); max{f[i,j-1]+f[i-1,j]}} (i>0,j>0,x<>y[j]); 22. 最大子矩阵2-----最大带权01子矩阵O(n^2*m) 枚举行的起始,压缩进数列,求最大字段和,遇0则清零 23. 资源问题4-----装箱问题(判定性01背包) f[j]:=(f[j] or f[j-v]);24. 数字三角形1-----朴素の数字三角形 f[i,j]:=max(f[i+1,j]+a[I,j],f[i+1,j+1]+a[i,j]);25. 数字三角形2-----晴天小猪历险记之Hill 同一阶段上暴力动态规划if[i,j]:=min(f[i,j-1],f[I,j+1],f[i-1,j],f[i-1,j-1])+a[i,j] 26. 双向动态规划1数字三角形3 -----小胖办证 f[i,j]:=max(f[i-1,j]+a[i,j],f[i,j-1]+a[i,j],f[i,j+1]+a[i,j])27. 数字三角形4-----过河卒 //边界初始化 f[i,j]:=f[i-1,j]+f[i,j-1]; 28. 数字三角形5-----朴素的打砖块 f[i,j,k]:=max(f[i-1,j-k,p]+sum[i,k],f[i,j,k]); 29. 数字三角形6-----优化的打砖块 f[I,j,k]:=max{g[i-1,j-k,k-1]+sum[I,k]} 30. 线性动态规划3-----打鼹鼠’ f:=f[j]+1;(abs(x-x[j])+abs(y-y[j])<=t-t[j]) 31. 树形动态规划3-----贪吃的九头龙 32. 状态压缩动态规划1-----炮兵阵地 Max(f[Q*(r+1)+k],g[j]+num[k]) If (map and plan[k]=0) and ((plan[P] or plan[q]) and plan[k]=0) 33. 递推天地3-----情书抄写员 f:=f[i-1]+k*f[i-2] 34. 递推天地4-----错位排列 f:=(i-1)(f[i-2]+f[i-1]); f[n]:=n*f[n-1]+(-1)^(n-2); 35. 递推天地5-----直线分平面最大区域数 f[n]:=f[n-1]+n :=n*(n+1) div 2 + 1; 36. 递推天地6-----折线分平面最大区域数 f[n]:=(n-1)(2*n-1)+2*n; 37. 递推天地7-----封闭曲线分平面最大区域数 f[n]:=f[n-1]+2*(n-1) :=sqr(n)-n+2; 38 递推天地8-----凸多边形分三角形方法数 f[n]:=C(2*n-2,n-1) div n; 对于k 边形 f[k]:=C(2*k-4,k-2) div (k-1); //(k>=3) 39 递推天地9-----Catalan 数列一般形式 1,1,2,5,14,42,132 f[n]:=C(2k,k) div (k+1);40 递推天地10-----彩灯布置排列组合中的环形染色问题f[n]:=f[n-1]*(m-2)+f[n-2]*(m-1); (f[1]:=m; f[2]:=m(m-1);41 线性动态规划4-----找数线性扫描sum:=f+g[j];(if sum=Aim then getout; if sum<Aim then inc(i) else inc(j);)42 线性动态规划5-----隐形的翅膀min:=min{abs(w/w[j]-gold)};if w/w[j]<gold then inc(i) else inc(j);43 剖分问题5-----最大奖励f:=max(f,f[j]+(sum[j]-sum)*i-t44 最短路1-----Floydf[i,j]:=max(f[i,j],f[i,k]+f[k,j]);ans[q[i,j,k]]:=ans[q[i,j,k]]+s[i,q[i,j,k]]*s[q[i,j,k],j]/s[i,j];45 剖分问题6-----小H的小屋F[l,m,n]:=f[l-x,m-1,n-k]+S(x,k);46 计数问题2-----陨石的秘密(排列组合中的计数问题)Ans[l1,l2,l3,D]:=f[l1+1,l2,l3,D+1]-f[l1+1,l2,l3,D];F[l1,l2,l3,D]:=Sigma(f[o,p,q,d-1]*f[l1-o,l2-p,l3-q,d]);47 线性动态规划------合唱队形两次F:=max{f[j]+1}+枚举中央结点48 资源问题-----明明的预算方案:加花的动态规划f[i,j]:=max(f[i,j],f[l,j-v-v[fb]-v[fa]]+v*p+v[fb]*p[fb]+v[fa]*p[ fa]);49 资源问题-----化工场装箱员50 树形动态规划-----聚会的快乐f[i,2]:=max(f[i,0],f[i,1]);f[i,1]:=sigma(f[t^.son,0]);f[i,0]:=sigma(f[t^.son,3]);51 树形动态规划-----皇宫看守f[i,2]:=max(f[i,0],f[i,1]);f[i,1]:=sigma(f[t^.son,0]); f[i,0]:=sigma(f[t^.son,3]);52 递推天地-----盒子与球f[i,1]:=1;f[i,j]:=j*(f[i-1,j-1]+f[i-1,j]);53 双重动态规划-----有限的基因序列f:=min{f[j]+1}g[c,i,j]:=(g[a,i,j] and g[b,i,j]) or (g[c,i,j])54 最大子矩阵问题-----居住空间f[i,j,k]:=min(min(min(f[i-1,j,k],f[i,j-1,k]),min(f[i,j,k-1],f[i-1,j-1,k])),min(min(f[i-1,j,k-1],f[i,j-1,k-1]),f[i-1,j-1,k-1]))+1;55 线性动态规划------日程安排f:=max{f[j]}+P[I]; (e[j]<s)56 递推天地------组合数C[I,j]:=C[i-1,j]+C[I-1,j-1]C[I,0]:=157 树形动态规划-----有向树k中值问题F[I,r,k]:=max{max{f[l,I,j]+f[r,I,k-j-1]},f[f[l,r,j]+f[r,r,k-j]+w[I,r]]}58 树形动态规划-----CTSC 2001选课F[I,j]:=w(if i∈P)+f[l,k]+f[r,m-k](0≤k≤m)(if l<>0)59 线性动态规划-----多重历史f[i,j]:=sigma{f[i-k,j-1]}(if checked)60 背包问题(+-1背包问题+回溯)-----CEOI1998Substractf[i,j]:=f[i-1,j-a] or f[i-1,j+a]61 线性动态规划(字符串)-----NOI 2000 古城之谜f[i,1,1]:=min{f[i+length(s),2,1],f[i+length(s),1,1]+1}f[i,1,2]:=min{f[i+length(s),1,2]+words[s],f[i+length(s),1,2]+words[s]}62 线性动态规划-----最少单词个数f[i,j]:=max{f[I,j],f[u-1,j-1]+l}63 线型动态规划-----APIO2007 数据备份状态压缩+剪掉每个阶段j前j*2个状态和j*2+200后的状态贪心动态规划f:=min(g[i-2]+s,f[i-1]);64 树形动态规划-----APIO2007 风铃f:=f[l]+f[r]+{1 (if c[l]<c[r])}g:=1(d[l]<>d[r]) 0(d[l]=d[r])g[l]=g[r]=1 then Halt;65 地图动态规划-----NOI 2005 adv19910F[t,i,j]:=max{f[t-1,i-dx[d[[t]],j-dy[d[k]]]+1],f[t-1,i,j];66 地图动态规划-----优化的NOI 2005 adv19910F[k,i,j]:=max{f[k-1,i,p]+1} j-b[k]<=p<=j;67 目标动态规划-----CEOI98 subtraF[I,j]:=f[I-1,j+a] or f[i-1,j-a]68 目标动态规划----- Vijos 1037搭建双塔问题F[value,delta]:=g[value+a,delta+a] or g[value,delta-a]69 树形动态规划-----有线电视网f[i,p]:=max(f[i,p],f[i,p-q]+f[j,q]-map[i,j])leaves>=p>=l, 1<=q<=p;70 地图动态规划-----vijos某题F[I,j]:=min(f[i-1,j-1],f[I,j-1],f[i-1,j]);71 最大子矩阵问题-----最大字段和问题f:=max(f[i-1]+b,b); f[1]:=b[1]72 最大子矩阵问题-----最大子立方体问题枚举一组边i的起始,压缩进矩阵B[I,j]+=a[x,I,j]枚举另外一组边的其实,做最大子矩阵73 括号序列-----线型动态规划f[I,j]:=min(f[I,j],f[i+1,j-1](ss[j]=”()”or(”[]”)),f[I+1,j+1]+1 (s[j]=”(”or”[” ] , f[I,j-1]+1(s[j]=”)”or”]” )74 棋盘切割-----线型动态规划f[k,x1,y1,x2,y2]=min{min{f[k-1,x1,y1,a,y2]+s[a+1,y1,x2,y2],f[k-1,a+1,y1,x2,y2]+s[x1,y1,a,y2]min{}}75 概率动态规划-----聪聪和可可(NOI2005)x:=p[p[i,j],j]f[I,j]:=(f[x,b[j,k]]+f[x,j])/(l[j]+1)+1f[I,i]=0f[x,j]=176 概率动态规划-----血缘关系F[A, B]=(f[A0, B]+P[A1, B])/2f[I,i]=1f[I,j]=0(I,j无相同基因)77 线性动态规划-----决斗F[I,j]=(f[I,j] and f[k,j]) and (e[I,k] or e[j,k]),i<k<j78 线性动态规划-----舞蹈家F[x,y,k]=min(f[a[k],y,k+1]+w[x,a[k]],f[x,a[k],k+1]+w[y,a[k]]) 79 线性动态规划-----积木游戏F[I,a,b,k]=max(f[I,a+1,b,k],f[i+1,a+1,a+1,k’],f[I,a+1,a+1,k’]) 80 树形动态规划(双次记录)----NOI2003 逃学的小孩朴素的话枚举节点i和离其最远的两个节点j,k O(n^2)每个节点记录最大的两个值,并记录这最大值分别是从哪个相邻节点传过来的。
数据结构之动态规划动态规划的基本思想和常见应用场景动态规划(Dynamic Programming,DP)是一种通过将问题分解为更小的子问题来解决复杂问题的方法。
它的基本思想是利用已解决过的子问题的解来求解当前问题的解,从而避免重复计算,提高算法效率。
动态规划的应用广泛,可以用于解决一些优化问题、最优化问题以及组合优化问题等。
动态规划的基本思想可以用以下三个步骤来概括:1. 定义子问题:将原问题划分为一个或多个子问题,并找到它们之间的关系。
2. 构建状态转移方程:根据子问题之间的关系,找到问题的递推关系,将问题转化为子问题的解。
3. 解决问题:通过递推计算或者自底向上的方法,求解问题的最终解。
动态规划的核心是状态转移方程。
状态转移方程描述了子问题与原问题之间的关系,通过它可以求解原问题的解。
在构建状态转移方程时,需要考虑如何选择最优子结构并进行状态转移,以及确定初始状态和边界条件。
动态规划常见的应用场景包括:1. 最优化问题:如最短路径问题、最长递增子序列问题、背包问题等。
这类问题中,动态规划可以帮助我们找到最优解。
2. 组合优化问题:如旅行商问题(TSP)、任务分配问题等。
这类问题中,动态规划可以帮助我们找到最佳的组合方案。
3. 概率计算问题:如概率图模型中的推断问题、隐马尔可夫模型中的预测问题等。
这类问题中,动态规划可以帮助我们计算复杂的概率。
举例来说,我们可以通过动态规划求解最长递增子序列问题。
给定一个序列,我们希望找到其中最长递增的子序列的长度。
首先,定义状态dp[i]表示以第i个元素结尾的最长递增子序列的长度。
然后,我们可以根据dp[i-1]和第i个元素的大小关系来更新dp[i]的值,即dp[i]= max(dp[i], dp[j]+1),其中j为i之前的某个位置,且nums[j] < nums[i]。
最后,我们通过遍历数组,找到dp数组中的最大值,即可得到最长递增子序列的长度。